Изобретение относится к области гидроакустики, а именно к гидроакустическим комплексам (ГАК), оснащенным пассивным и активным режимами работы и предназначенным для обнаружения подводных (ПО) и надводных (НО) объектов.
Наиболее сложной задачей, решаемой такими ГАК, является классификация объекта, обнаруженного в пассивном режиме их работы.
Методы классификации шумящих морских объектов (далее - объектов) в пассивном режиме работы ГАК приведены в работах [1-6]. Недостатком большинства из них является то, что они не применимы при малых отношениях сигнал/помеха (ОСП), т.е. на предельных дальностях их обнаружения.
В качестве прототипа выберем способ классификации обнаруженного шумящего объекта, описанный в [5]. Он включает измерение уровня и скорости изменения пеленга шумового сигнала на выходе приемного тракта ГАК и принятие решения о классе цели с учетом текущих гидроакустических условий.
Достоинством прототипа является его простота, а недостатком то, что во многих случаях (особенно на предельных дальностях обнаружения объектов) скорость изменения пеленга с необходимой точностью измерить не удается ввиду того, что изменение пеленга за приемлемое время в этих случаях меньше ошибки измерения пеленга. Как правило, классификация ? шумящих объектов на предельных дистанциях их обнаружения не превышает 0,7, что не в полной мере отвечает потребностям практики.
Ввиду этого актуальной является разработка способов классификации объектов, работоспособных в более широком диапазоне условий и, особенно, при малых ОСП и за короткое время с момента обнаружения шума объекта.
Решаемая техническая проблема - повышение эффективности классификации морских объектов.
Достигаемый технический результат - повышение вероятности правильной классификации на предельных дистанциях обнаружения объекта.
Технический результат достигается тем, что для классификации цели привлекается активный режим работы ГАК, который позволяет непосредственно после обнаружения объекта в пассивном режиме измерить дистанцию до обнаруженного объекта и с ее использованием принять решение о классе объекта.
Идея предлагаемого способа базируется на известном факте [1,7], заключающемся в том, что шумность надводного объекта существенно превышает шумность подводного объекта, в результате чего НО в одних и тех же условиях обнаруживается на бóльших дистанциях, чем ПО. Учитывая это, можно рассчитать предположительные интервалы дистанций обнаружения ПО и НО в пассивном режиме работы конкретного ГАК в текущих гидроакустических условиях. Тогда, обнаружив объект в пассивном режиме и измерив фактическую дистанцию до него в активном режиме, можно определить в какой из областей находится обнаруженный объект и тем самым принять решение о его классе.
Сущность изобретения заключается в том, что непосредственно после обнаружения морского шумящего объекта в пассивном режиме измеряют дистанцию до него в активном режиме и принимают решение о классе объекта с использованием измеренной дистанции и плотностей распределения вероятностей дистанций обнаружения каждого из распознаваемых классов объектов в пассивном режиме, рассчитываемых с учетом плотностей распределения вероятностей шумности, наклона спектра шума и глубины погружения объекта, а также вертикального распределения скорости звука и волнения поверхности моря в районе плавания.
Обоснуем реализуемость и эффективность данного способа.
Дистанция обнаружения объекта в пассивном режиме шумопеленгования (ШП) определяется путем решения относительно дистанции 
где





















Из рассмотрения формул (1)-(5) следует, что в них от класса объекта зависят только 3 параметра:
- приведенная шумность объекта 
- наклон спектра шума объекта
- глубина погружения объекта
Если задаться плотностями распределения вероятностей (ПРВ) шумности 
Сделать это можно путем вычисления для каждого из двух классов и каждого из дискретных значений дистанции 



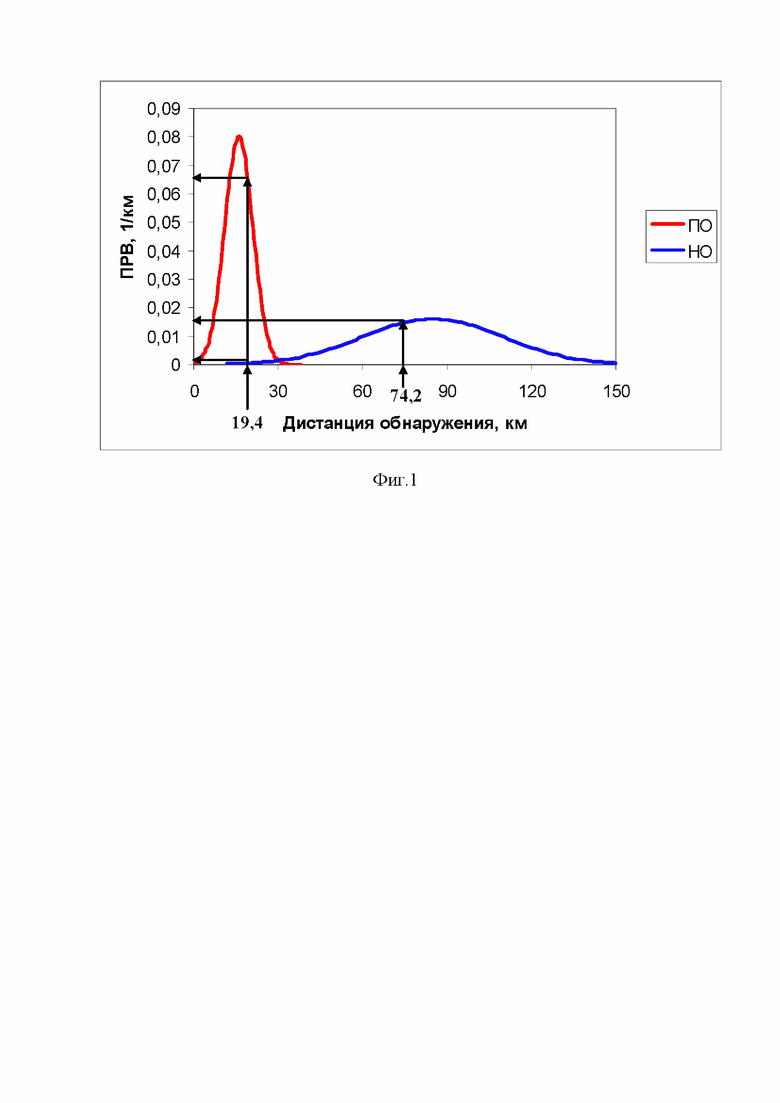
На фиг.1 в качестве примера приведены ПРВ подводного объекта и надводного объекта, рассчитанные при следующих исходных данных:
- гидроакустические условия - мелкое море с глубиной 200 м, зима, сплошная акустическая освещенность, волнение моря 3 балла;
- ПРВ приведенных шумностей:
 для подводного объекта
для подводного объекта 
для надводного объекта 
где 

- наклон спектра шумоизлучения ПО и НО в звуковом диапазоне частот можно принять равной -6 дБ/октава;
- ПРВ глубины погружения подводного объекта 
- приведенный уровень шумов носителя ГАК на входе антенны
- приведенный уровень шумов моря на входе антенны
- наклон спектра шумов носителя ГАК и шумов моря 
- вероятность правильного обнаружения 
- вероятность ложной тревоги 
- глубина погружения носителя ГАК 50 м;
- прием осуществляется на бортовую антенну шириной 10 м и высотой
3 м в диапазоне частот 0,5-7 кГц, разбитом на 3 поддиапазона.
Реализация предлагаемого способа осуществляется следующим образом.
1) В районе плавания периодически измеряются вертикальное распределение скорости звука и волнение поверхности моря и описанным выше способом рассчитываются ПРВ дистанций обнаружения ПО и НО
2) При обнаружении шумящего объекта измеряется дистанция до него 
3) Вычисляются апостериорные вероятности принадлежности обнаруженного объекта классам ПО и НО [12]:
4) В качестве класса обнаруженного объекта принимается класс, которому соответствует бóльшая апостериорная вероятность.
Оценим эффективность предлагаемого способа в описанных выше условиях. Рассмотрим 2 случая: обнаружение ПО и обнаружение НО.
Шумности подводного и надводного объектов и глубину погружения ПО выберем случайным образом с использованием их ПРВ. Датчик равномерно распределенных случайных чисел выдал следующие значения:
- шумность подводного объекта 61 дБ, глубина погружения 76 м;
- шумность надводного объекта 92 дБ.
В первом случае в результате применения активного режима было установлена, что дистанция обнаружения подводного объекта в пассивном режиме составила 
По формуле (6) с использованием ПРВ дистанции обнаружения ПО и НО, изображенных на фиг.1, получаем:
Таким образом, в первом случае обнаруженный в пассивном режиме объект является подводным с вероятностью 0,991, что соответствует истине.
Во втором случае в результате применения активного режима было установлено, что дистанция обнаружения надводного объекта в пассивном режиме составила
По формуле (6) с использованием ПРВ дистанции обнаружения ПО и НО, изображенных на фиг.1, получаем:
Таким образом, во втором случае обнаруженный в пассивном режиме объект является надводным с вероятностью 1, что также соответствует истине.
Таким образом, предлагаемый способ совместного использования пассивного и активного режимов обеспечивает существенное повышение вероятности классификации шумящих объектов по сравнению с использованием только пассивного режима. Отсюда можно сделать вывод, что заявленный технический результат достигнут.
Источники информации:
1. Телятников В.И. Методы и устройства классификации гидроакустических сигналов // Зарубежная радиоэлектроника, 1979, №9, с.19-38.
2. Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы // СПб.: Наука, 2004.
3. Патент РФ №2681432.
4. Патент РФ №2681526.
5. Патент РФ №2685419.
6. Патент РФ №2692839.
7. Урик Р. Дж. Основы гидроакустики //Л.: Судостроение, 1978.
8. Справочник по гидроакустике. Л., Судостроение, 1988.
9. Матвиенко В.Н., Тарасюк Ю.Ф. Дальность действия гидроакустических средств // Л.: Судостроение, 1976.
10. Смарышев М.Д., Добровольский Ю.Ю. Гидроакустические антенны // Л.: Судостроение, 1984.
11. Акустика океана под ред. Л.М.Бреховских // М.: Наука, 1974.
12. Кендал М., Стьюарт А. Статистические выводы и связи // М.: Наука, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения класса шумящей цели и дистанции до неё | 2018 |
|
RU2681526C1 |
| Способ определения координат морской шумящей цели | 2019 |
|
RU2724962C1 |
| Способ определения класса шумящей цели и дистанции до неё | 2018 |
|
RU2681432C1 |
| Способ определения класса объекта, обнаруженного шумопеленгаторной станцией | 2023 |
|
RU2835874C1 |
| Способ пассивного определения пространственного положения обнаруженного шумящего в море подводного объекта позиционным стационарным гидроакустическим комплексом | 2023 |
|
RU2810698C1 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ | 2015 |
|
RU2590933C1 |
| Способ классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот | 2019 |
|
RU2718144C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ И СПОСОБ ПОЛУЧЕНИЯ ЦВЕТОВЫХ ШКАЛ ДЛЯ НЕГО | 1999 |
|
RU2156984C1 |
| Устройство получения информации о шумящем в море объекте | 2017 |
|
RU2650830C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
Изобретение относится к области гидроакустики, а именно к гидроакустическим комплексам (ГАК), оснащенным пассивным и активным режимами работы, и предназначенным для обнаружения подводных и надводных объектов. Технический результат - повышение вероятности классификации на предельных дистанциях обнаружения шумящего объекта. Для классификации цели привлекается активный режим работы ГАК, который позволяет непосредственно после обнаружения объекта в пассивном режиме измерить дистанцию до обнаруженного объекта и с ее использованием принять решение о классе объекта. 1 ил.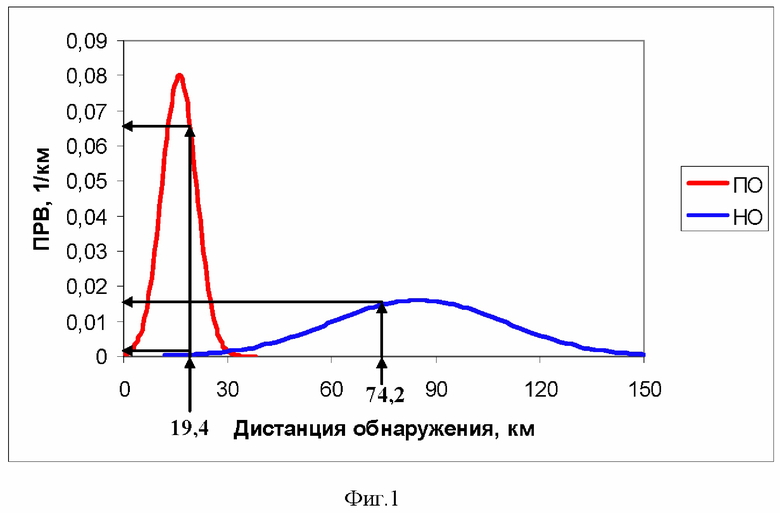
Способ определения класса шумящего морского объекта, обнаруженного гидроакустическим комплексом, функционирующим в пассивном и активном режимах, включающий обнаружение объекта в пассивном режиме, отличающийся тем, что непосредственно после обнаружения морского объекта в пассивном режиме измеряют дистанцию до него в активном режиме и принимают решение о классе объекта с использованием измеренной дистанции и плотностей распределения вероятностей дистанций обнаружения каждого из распознаваемых классов объектов в пассивном режиме, рассчитываемых с учётом плотностей распределения вероятностей шумности, наклона спектра шума и глубины погружения объекта, а также вертикального распределения скорости звука и волнения поверхности моря в районе плавания.
| Способ обнаружения, классификации и определения координат и параметров движения морской шумящей цели | 2018 |
|
RU2692839C1 |
| Способ классификации морских объектов пассивными гидроакустическими средствами | 2018 |
|
RU2703804C1 |
| Способ классификации целей, адаптированный к гидроакустическим условиям | 2016 |
|
RU2624826C1 |
| Способ определения класса шумящей цели и дистанции до неё | 2018 |
|
RU2681432C1 |
| Способ адаптивной дихотомической классификации морских объектов | 2019 |
|
RU2730048C1 |
| Способ классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот | 2019 |
|
RU2718144C1 |
| WO 2009148329 A1, 10.12.2009 | |||
| CN 112230205 A, 15.01.2021 | |||
| CN 203178489 U, 04.09.2013. | |||

