Изобретение относится к областям гидроакустики и гидрооптики и может быть использовано для обнаружения технических объектов, движущихся в море.
Согласно теории статистических решений [Лебедько Е.Г. Математические основы передачи информации, ч. 3, 4: учеб. пособие для вузов. СПб.: СПбГУИТМО. 2009. С. 5-22] обнаружение объекта является сложным событием, состоящим из двух взаимозависимых событий: объект присутствует в среде (событие H1) и сигнал объекта обнаружен (событие S1). Противоположные события, составляющие полную группу с событиями H1 и S1 обозначим Н0 (объект отсутствует в среде) и S0 (сигнал объекта не обнаружен), соответственно. Сумма вероятностей Р событий, составляющих полную группу равна единице, то есть Р(Н1)+Р(Н0)=1, P(S1)+P(S0)=1. Вероятность сложного события определяется формулой для полной апостериорной вероятности Байеса.
Основой для построения схемы современного обнаружителя является критерий максимизации полной апостериорной вероятности Байеса, согласно которому порог по величине отношения мощности сигнала к мощности помехи определяется как аргумент функции отношения правдоподобия, в котором она принимает заданное значение, то есть:

где Por - пороговое значение отношения сигнал-помеха;
argƒ - аргумент функции;
 - функция отношения правдоподобия, где х - отношение сигнал-помеха, w(S1) и w(S0) - плотности распределения отношения сигнал-помеха для событий S1 и S0, соответственно;
- функция отношения правдоподобия, где х - отношение сигнал-помеха, w(S1) и w(S0) - плотности распределения отношения сигнал-помеха для событий S1 и S0, соответственно;
Р(Н1), Р(Н0) - вероятности событий H1 и Н0, соответственно.
Априорное знание вероятностей событий H1 и Н0, то есть знание о том, насколько вероятно присутствие объекта в среде, является основным условием, при котором обеспечивается наибольшая эффективность любого обнаружителя.
Известны гидроакустические обнаружители [Антипов В.А., Величкин С.М., Обчинец О.Г, Подгайский Ю.П., Янпольская А.А. Патент РФ № 2300118 от 29.08.2005. Способ обнаружения шумящих в море объектов, МПК G01S3/80; Антипов В.А., Величкин С.М., Подгайский Ю.П. Патент РФ № 2339050 от 20.11.2008. Способ обнаружения шумящих в море объектов. МПК G01S 3/80, G01S 15/04]. Основой для всех этих способов является типовой приемный тракт шумопеленгования [Справочник по гидроакустике / А.П. Евтютов, А.Е. Колесников, Е.А. Корепин и др. Л.: Судостроение. 1988. С. 26-27], в котором последовательно соединены приемная гидроакустическая антенна и система пространственно-частотно-временной обработки, выходное отношение сигнал-помеха которой подается на пороговое устройство.
В указанных способах вероятности событий H1 и Н0 являются неизвестными. Тогда, для возможности использования формулы (1) при формировании порога, вероятности этих событий принимаются равновероятными, то есть Р(Н1)=Р(Н0)=0.5. Это позволяет формально использовать формулу (1), в которой  то есть в качестве порога выбирается аргумент функции отношения правдоподобия w(x), при котором она принимает значение равное 1: Por=argƒ(w(x)=1). Однако, это не позволяет обеспечить потенциальную эффективность обнаружения указанными способами.
то есть в качестве порога выбирается аргумент функции отношения правдоподобия w(x), при котором она принимает значение равное 1: Por=argƒ(w(x)=1). Однако, это не позволяет обеспечить потенциальную эффективность обнаружения указанными способами.
Наиболее близким аналогом по используемым принципам работы и составу операций к предлагаемому изобретению является способ шумопеленгования, описанный в [Корякин Ю.А, Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. СПб. Наука. 2004. С. 52-54].
Способ, выбранный в качестве прототипа, содержит следующие процедуры:
гидроакустической антенной принимают шумовой процесс, состоящий из аддитивной смеси сигнала шумоизлучения морского объекта с помехой,
осуществляют частотно-временную обработку шумового процесса с определением значения отношения сигнал-помеха,
формируют порог обнаружения,
принимают решение об обнаружении шумящего в море объекта путем сравнения отношения сигнал-помеха с порогом.
В указанном способе, также, как и в способах-аналогах, вероятности событий H1 и Н0 являются неизвестными и их принимают равновероятными для возможности формального использования формулы (1) на основании которой Por=argƒ(w(x)=1).
Рассмотрим основные показатели эффективности обнаружения при использовании такого порога:
 - вероятность правильного обнаружения,
- вероятность правильного обнаружения,
 - вероятность ложной тревоги, то есть вероятность принятия решения об обнаружении объекта при его отсутствии в среде.
- вероятность ложной тревоги, то есть вероятность принятия решения об обнаружении объекта при его отсутствии в среде.
Эффективный обнаружитель должен стремиться к увеличению вероятности правильного обнаружения при одновременном уменьшении ложной тревоги. Однако, анализ приведенных формул показывает, что совместное увеличение и уменьшение значений приведенных выражений возможно только путем изменения Р(Н1) и Р(Н0). При увеличении Р(Н1), значение Р(Н0)=1-Р(Н1) будет уменьшаться, и наоборот. Остальные множители в приведенных выражениях ведут себя одинаково монотонно. То есть при Р(Н1)=Р(Н0)=0.5, что применяется в способе-прототипе, не обеспечивается потенциально возможная эффективность обнаружителя.
Задачей заявляемого способа является увеличение эффективности обнаружения морских объектов, характерными чертами которых являются не только излучаемый шумовой гидроакустический сигнал, но и гидродинамические возмущения водной среды, присутствие которых возможно определить гидрооптическими средствами.
Для решения поставленной задачи в способ обнаружения морского движущегося объекта, в котором
принимают гидроакустической антенной шумовой процесс, состоящий из аддитивной смеси сигнала шумоизлучения морского объекта с помехой,
осуществляют частотно-временную обработку шумового процесса с определением значения отношения сигнал-помеха,
формируют порог обнаружения,
принимают решение об обнаружении движущегося в море объекта путем сравнения значения отношения сигнал-помеха с порогом,
введены новые признаки, а именно
излучают оптический сигнал в воду и принимают отраженный от кильватерного следа оптический сигнал гидрооптической антенной,
осуществляют частотно-временную обработку принятого оптического сигнала с формированием значения возраста кильватерного следа,
формируют порог обнаружения как адаптивный, зависящий от вероятности нахождения движущегося объекта в зоне поиска, которая определяется по возрасту кильватерного следа,
а решение об обнаружении движущегося объекта принимают по факту превышения значением отношения сигнал-помеха значения адаптивного порога.
Техническим результатом изобретения является увеличение вероятности правильного обнаружения с одновременным уменьшением вероятности ложной тревоги при обнаружении движущихся в море объектов за счет привлечения дополнительной информации о вероятности нахождения этих объектов в зоне поиска.
Технический результат достигается путем объединения возможностей гидроакустического и гидрооптического каналов наблюдения.
Известно, что при движении в море технического объекта, он не только излучает акустический шум, обнаруживаемый средствами гидроакустического шумопеленгования, но также за ним остается кильватерный след, который представляет собой область неоднородности физических полей морской среды и может существовать достаточно длительное время. Для обнаружения кильватерного следа движущихся объектов могут быть использованы известные гидрооптические способы и средства обнаружения неоднородности физических полей морской среды [Долин Л.С, Левин И.М. Справочник по теории подводного видения. Л.: Гидрометеоиздат, 1991, Гольдин И.Д., Утенков Б.И., Эмдин B.C. Гидрооптические системы контроля параметров морской среды // Морская радиоэлектроника. Вып. 3(3). 2002. С. 58-60, Полетаева М.А. Экспериментальное исследование гидрофизических возмущений поля скорости, вызванного движением подводного объекта сферической формы, методом объемных измерений // 13-я Всероссийская конференция «Прикладные технологии гидроакустики и гидрофизики» // ФГУП «Крыловский государственный научный центр». – СПб.: Институт океанологии им. П.П. Ширшова РАН (Санкт-Петербург) 2016., Белоусов П.Я., Дубнишев Ю.И., Павлов В.Д. Визуализация поля скорости потока // Оптика и спектроскопия. 1982. Т. 52, М 5. С. 876-879.].
Наблюдаемость гидрофизических возмущений водной среды, вызванных движением объекта, с применением гидрооптических средств подтверждается рядом публикаций [Родионов М.А. Исследование возможностей лидарной диагностики гидрофизических полей на основе гидрологических и гидрооптических измерений в северных морях России. – Автореф. дис. канд. физмат. наук. СПб. 2012. С. 2-27].
Время существования кильватерного следа определяется природой физического поля и может составлять несколько часов. При этом, наблюдаемая гидрооптическими средствами структура кильватерного следа, изменяется по мере удаления от объекта по известному закону [Глухов В.А., Гольдин Ю.А., Родионов М.А. Экспериментальная оценка возможностей лидара ПЛД-1 по регистрации гидрооптических неоднородностей в толще морской среды // Фундаментальная и прикладная гидрофизика. 2017. Т. 10. № 2. С. 41-48].
Указанные гидрооптические средства на основании структуры кильватерного следа, определяемой через характеристики отраженного оптического сигнала, позволяют определить возраст следа Т, то есть момент времени в прошлом, когда объект находился в настоящей точке следа, что, в свою очередь, позволяет определить вероятность нахождения объекта в зоне поиска.
Для гидроакустических средств наблюдения зоной поиска является круг, радиусом R которого является дальность действия. Тогда площадь зоны поиска может быть найдена из геометрических соотношений как πR2. В связи с тем, что направление движения объекта поиска неизвестно, зона, из которой объект уже вышел, также должна быть представлена в виде круга, радиусом которого является произведение возраста кильватерного следа Т на скорость движения объекта V, то есть путь, пройденный объектом с момента времени в прошлом, когда был оставлен кильватерный след, до настоящего момента. Площадь зоны, из которой объект уже вышел, может быть найдена как π2V2. Тогда, согласно классическому определению вероятности [Вентцель Е.С. Теория вероятностей. М.: Высш. шк. 1998. С. 23-27], вероятность отсутствия объекта в среде можно записать как отношение площади зоны, из которой объект уже вышел, к площади зоны поиска, то есть  Учитывая, что Р(Н1)=1-Р(Н0), получим
Учитывая, что Р(Н1)=1-Р(Н0), получим  Это позволяет не формально, а реально использовать формулу (1) при формировании порога обнаружения.
Это позволяет не формально, а реально использовать формулу (1) при формировании порога обнаружения.
Здесь необходимо иметь в виду, что площадь зоны, из которой объект уже вышел, может оказаться больше площади зоны поиска. Это произойдет в случае, когда значение возраста кильватерного следа достаточно большое (след старый). В этом случае использование формулы  становится некорректным, и необходимо использовать формулу способа-прототипа
становится некорректным, и необходимо использовать формулу способа-прототипа 
То есть, при дополнении гидроакустического канала наблюдения гидрооптическим каналом можно получить значение возраста кильватерного следа движущегося объекта, и сформировать адаптивный порог обнаружения, зависящий от вероятности нахождения объекта в зоне поиска, как  Такой порог обеспечит потенциальные возможности критерия максимума полной апостериорной вероятности Байеса при обнаружении объекта.
Такой порог обеспечит потенциальные возможности критерия максимума полной апостериорной вероятности Байеса при обнаружении объекта.
Предположим, что в гидрооптическом канале получено значение возраста кильватерного следа такое, что R2-T2V2>0 и  то есть значение возраста кильватерного следа мало. Это значит, что движущийся объект с большой вероятностью находится в зоне поиска. Функция отношения правдоподобия w(x) является монотонно-возрастающей, следовательно, уменьшение ее значения при
то есть значение возраста кильватерного следа мало. Это значит, что движущийся объект с большой вероятностью находится в зоне поиска. Функция отношения правдоподобия w(x) является монотонно-возрастающей, следовательно, уменьшение ее значения при  приведет к уменьшению порогового значения отношения сигнал-помеха Por. В этом случае, значения интегралов в формулах (2) и (3), определяющих вероятность правильного обнаружения и ложной тревоги, будут увеличены относительно их значений для способа-прототипа. При этом неравенство
приведет к уменьшению порогового значения отношения сигнал-помеха Por. В этом случае, значения интегралов в формулах (2) и (3), определяющих вероятность правильного обнаружения и ложной тревоги, будут увеличены относительно их значений для способа-прототипа. При этом неравенство  предполагает, что Р(Н1)>0.5, а Р(Н0)=1-Р(Н1)<0.5. Это позволит обеспечить одновременное увеличение вероятности правильного обнаружения P(S1|H1) и уменьшение вероятности ложной тревоги P(S1|H0). В случае, если в гидрооптическом канале получено значение возраста кильватерного следа такое, что R2-T2V2>0, но при этом
предполагает, что Р(Н1)>0.5, а Р(Н0)=1-Р(Н1)<0.5. Это позволит обеспечить одновременное увеличение вероятности правильного обнаружения P(S1|H1) и уменьшение вероятности ложной тревоги P(S1|H0). В случае, если в гидрооптическом канале получено значение возраста кильватерного следа такое, что R2-T2V2>0, но при этом  получим обратную ситуацию, предполагающую малую вероятность нахождения объекта в зоне поиска. Пороговое значение отношения сигнал-помеха будет увеличено, что приведет к верному увеличению вероятности правильного необнаружения объекта. В случае, если в гидрооптическом канале получено значение возраста кильватерного следа такое, что R2-T2V2≤0, или значение возраста кильватерного следа не определено, пороговое значение отношения сигнал-помеха будет получено как в способе-прототипе.
получим обратную ситуацию, предполагающую малую вероятность нахождения объекта в зоне поиска. Пороговое значение отношения сигнал-помеха будет увеличено, что приведет к верному увеличению вероятности правильного необнаружения объекта. В случае, если в гидрооптическом канале получено значение возраста кильватерного следа такое, что R2-T2V2≤0, или значение возраста кильватерного следа не определено, пороговое значение отношения сигнал-помеха будет получено как в способе-прототипе.
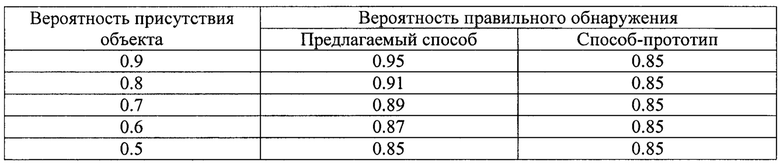
Можно показать, что если плотности распределения отношения сигнал-помеха для событий S1 и S0 - w(S1) и w(S0) заданы нормальными распределениями с параметрами: m=5, σ=1 - математическое ожидание и среднеквадратическое отклонение для w(S1), m=3, σ=1 - математическое ожидание и среднеквадратическое отклонение для w(S0), то при равных вероятностях нахождения и отсутствия объекта в зоне поиска  (для условий способа-прототипа) получим пороговое значение Por=4, которое обеспечивает вероятность правильного обнаружения P(S1|H1)=0.85 и вероятность ложной тревоги P(S1|H0)=0.15. При тех-же плотностях распределения отношения сигнал-помеха для событий S1 и S0, но при повышенной вероятности нахождения объекта в зоне поиска
(для условий способа-прототипа) получим пороговое значение Por=4, которое обеспечивает вероятность правильного обнаружения P(S1|H1)=0.85 и вероятность ложной тревоги P(S1|H0)=0.15. При тех-же плотностях распределения отношения сигнал-помеха для событий S1 и S0, но при повышенной вероятности нахождения объекта в зоне поиска  (для условий предлагаемого способа) получим уменьшенное значение порога Por=3, которое, однако, обеспечивает увеличение вероятности правильного обнаружения P(S1|H1)=0.95 и уменьшение вероятности ложной тревоги P(S1|H0)=0.05. Результаты для показателей эффективности обнаружения при заданных плотностях распределения могут быть сведены в таблицу.
(для условий предлагаемого способа) получим уменьшенное значение порога Por=3, которое, однако, обеспечивает увеличение вероятности правильного обнаружения P(S1|H1)=0.95 и уменьшение вероятности ложной тревоги P(S1|H0)=0.05. Результаты для показателей эффективности обнаружения при заданных плотностях распределения могут быть сведены в таблицу.
Таким образом, дополнительные процедуры способа, реализующие гидрооптический канал наблюдения и формирование адаптивного порога обнаружения позволяют увеличить вероятность правильного обнаружения с одновременным уменьшением вероятности ложной тревоги для морских движущихся объектов.
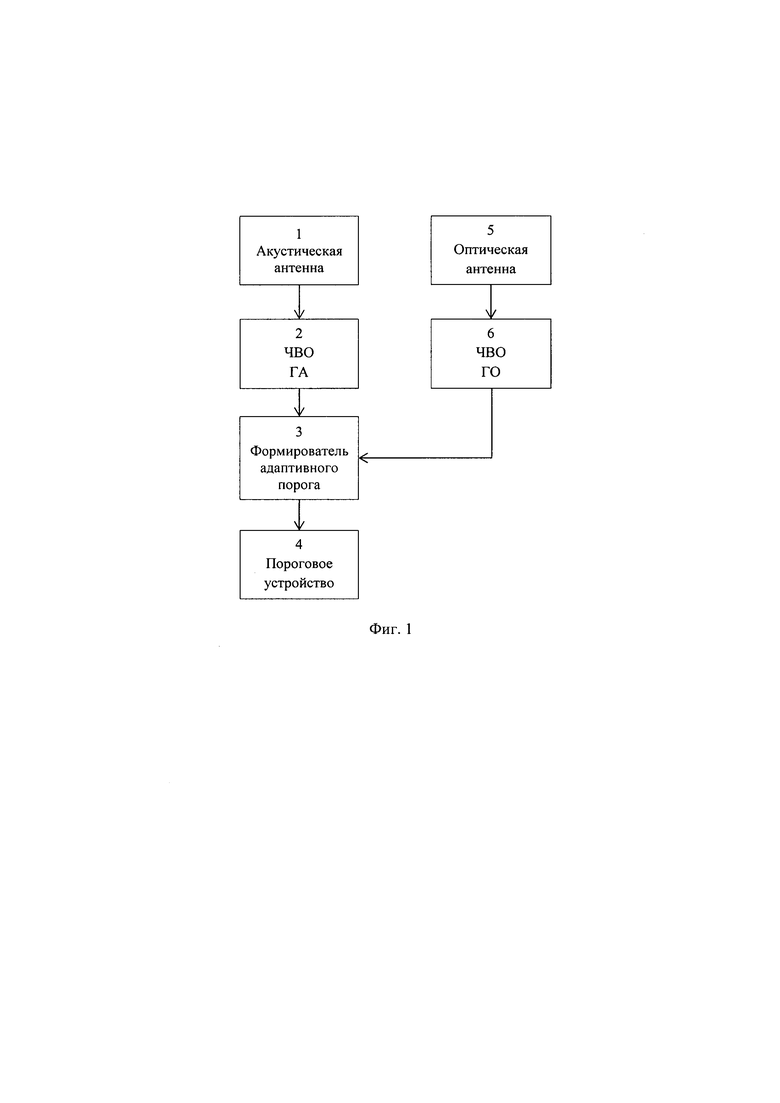
Сущность изобретения поясняется фигурой 1, на которой приведена блок-схема устройства, реализующего предлагаемый способ.
Устройство состоит из двух цепочек блоков. В первой цепочке последовательно соединены акустическая антенна 1, система 2 частотно-временной обработки гидроакустического канала (ЧВО ГА), формирователь 3 адаптивного порога и пороговое устройство 4. Во второй цепочке последовательно соединены оптическая антенна 5 и система 6 частотно-временной обработки оптического канала (ЧВО ГО). Выход системы 6 соединен со вторым входом формирователя 3.
Акустическая антенна 1 и система 2, а также пороговое устройство 4 представляют собой гидроакустический канал обработки и могут быть выполнены так, как описано в прототипе.
Оптическая антенна 5 и система 6 представляют собой гидрооптический канал обработки и могут быть реализованы, например, как лидар ПЛД1, состоящий из оптического блока, блока питания лазера, блока управления и блока регистрации [Глухов В.А., Гольдин Ю.А., Родионов М.А. Экспериментальная оценка возможностей лидара ПЛД-1 по регистрации гидрооптических неоднородностей в толще морской среды // Фундаментальная и прикладная гидрофизика. 2017. Т. 10. №2. С. 41-48]. При использовании лидара ПЛД-1 в качестве оптической антенны 5 может быть использован его оптический блок, совмещающий в себе источник зондирующего излучения - импульсный твердотельный лазер, и приемник отраженных сигналов - фото приемное устройство. Кроме того, антенна 5 должна содержать в себе блок питания лазера для генерирования излучаемого оптического сигнала. Система 6 может быть реализована на основе блока управления и блока регистрации лидара ПЛД-1. В блоке управления осуществляется подготовка и формирование излучаемого оптического сигнала, а в блоке регистрации необходимая обработка принятого оптического сигнала.
В формирователе 3 формируется адаптивный порог обнаружения.
В динамике работы предлагаемый способ реализуется следующим образом. В простейшем случае и оптическая и акустическая антенна являются узконаправленными. Тогда излучение и прием сигнала осуществляются в одном направлении, а обзор зоны поиска осуществляется либо сканированием характеристик направленности, либо маневром носителя. В другом случае, для акустической и/или оптической антенны может быть реализован веер характеристик направленности, который осуществляет одновременный секторный обзор пространства. Для реализации предлагаемого способа техническая реализация способа обзора пространства акустической и оптической антеннами не является принципиальной.
Оптическая антенна 5 излучает и принимает оптический сигнал. В системе 6 осуществляется необходимая обработка принятого оптического сигнала с определением возраста кильватерного следа Т. Например, при использовании лидара ПЛД-1, возраст кильватерного следа может быть определен на основании пикового значения отраженного сигнала, которое зависит от плотности среды отражения, то есть от структуры кильватерного следа, которая изменяется с возрастом по известному закону. Возраст кильватерного следа поступает в формирователь 3. В формирователе 3, в котором хранится функция отношения правдоподобия w(x) и дальность действия R для гидроакустического канала, а также предполагаемая скорость движения подводного объекта поиска V, осуществляется формирование адаптивного порога:

где argƒ - аргумент функции; w(x) - функция отношения правдоподобия аргументом которой являются возможные значения отношения сигнал-помеха х; Т - возраст кильватерного следа; R - дальность действия гидроакустических средств; V - скорость движения морского технического объекта поиска. Скорость движения морских технических объектов лежит в узком диапазоне [Фолкнер К. Боевые корабли. Справочник / Пер. с англ. М.: Астрель. 2002] и может быть принята своим средним значением около 12 узлов.
Одновременно гидроакустическая антенна 1 принимает шумовой акустический сигнал. В системе 2 осуществляется необходимая обработка принятого акустического сигнала с определение значения отношения сигнал-помеха. Измеренное отношение сигнал-помеха из системы 2 и пороговое значение из формирователя 3 поступают в пороговое устройство 4, в котором по факту превышения значением отношения сигнал-помеха порога принимается решение об обнаружении движущегося объекта.
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ обнаружения морских движущихся объектов, совмещающий в себе возможности гидроакустического и гидрооптического каналов наблюдения. Способ позволяет, используя гидрооптический канал наблюдения, формировать адаптивный порог обнаружения для гидроакустического канала наблюдения, обеспечивая, тем самым, потенциально возможную эффективность обнаружителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ гидролокационного обнаружения высокоскоростного малоразмерного объекта | 2020 |
|
RU2740158C1 |
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2013 |
|
RU2546851C1 |
| Обнаружитель движущихся подводных объектов на фоне биологического шума мелководной акватории, где обитают раки-щелкуны | 2021 |
|
RU2779380C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ ОБНАРУЖИТЕЛЬ ДВИЖУЩЕГОСЯ МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2563140C1 |
| Способ обнаружения шумящих в море объектов | 2019 |
|
RU2726293C1 |
| Способ определения класса шумящей цели | 2018 |
|
RU2685419C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭФФЕКТИВНОСТИ МНОГОПОЗИЦИОННОЙ ГИДРОАКУСТИЧЕСКОЙ СИСТЕМЫ | 2015 |
|
RU2611556C1 |
| Интерференционный обнаружитель движущегося подводного морского объекта с медианной фильтрацией сигнала | 2023 |
|
RU2809350C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2020 |
|
RU2759498C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЕЙ И ГОРИЗОНТАЛЬНОЙ НАПРАВЛЕННОСТИ ШУМОВ МОРСКОГО НЕФТЕГАЗОВОГО КОМПЛЕКСА | 2011 |
|
RU2480781C2 |
Использование: изобретение относится к областям гидроакустики и гидрооптики и может быть использовано для обнаружения движущихся технических объектов. Сущность: способ применяется для типового тракта гидроакустического наблюдения, в котором осуществляют частотно-временную обработку принятого шумового сигнала, и принимают решение об обнаружении объекта при превышении значением отношения сигнал-помеха порогового значения. При реализации способа, дополнительно к гидроакустическому каналу наблюдения, формируют гидрооптический канал наблюдения, в котором осуществляют частотно-временную обработку принятого оптического сигнала с определением возраста кильватерного следа. На основании дополнительной информации определяют вероятность нахождения объекта в зоне поиска и формируют адаптивный порог обнаружения на основании критерия максимума апостериорной вероятности Байеса. Технический результат: увеличение вероятности правильного обнаружения с одновременным уменьшением вероятности ложной тревоги при обнаружении движущихся объектов за счет привлечения дополнительной информации о вероятности нахождения этих объектов в зоне поиска. 1 табл., 1 ил.
Способ обнаружения морского движущегося объекта, в котором принимают гидроакустической антенной шумовой процесс, состоящий из аддитивной смеси сигнала шумоизлучения морского объекта с помехой, осуществляют частотно-временную обработку шумового процесса с определением значения отношения сигнал-помеха, формируют порог обнаружения, принимают решение об обнаружении движущегося в море объекта путем сравнения значения отношения сигнал-помеха с порогом, отличающийся тем, что излучают оптический сигнал в воду и принимают отраженный от кильватерного следа оптический сигнал гидрооптической антенной, осуществляют частотно-временную обработку принятого оптического сигнала с формированием значения возраста кильватерного следа, формируют адаптивный порог обнаружения 
 где argƒ – аргумент функции, w(x) – функция отношения правдоподобия, аргументом которой являются возможные значения отношения сигнал-помеха х, Т – возраст кильватерного следа, R – дальность действия гидроакустических средств, V – скорость движения морского технического объекта поиска, а решение об обнаружении движущегося объекта принимают по факту превышения значением отношения сигнал-помеха значения адаптивного порога Por.
где argƒ – аргумент функции, w(x) – функция отношения правдоподобия, аргументом которой являются возможные значения отношения сигнал-помеха х, Т – возраст кильватерного следа, R – дальность действия гидроакустических средств, V – скорость движения морского технического объекта поиска, а решение об обнаружении движущегося объекта принимают по факту превышения значением отношения сигнал-помеха значения адаптивного порога Por.
| Глухов В.А., Гольдин Ю.А., Родионов М.А | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Фундаментальная и прикладная гидрофизика, 2017, т | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Механический грохот | 1922 |
|
SU41A1 |
| Способ формирования системы морского мониторинга с программируемым нейросетевым комплексом управления | 2018 |
|
RU2694846C1 |
| СПОСОБ ОБНАРУЖЕНИЯ АНОМАЛИЙ НА ВОДНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2503029C2 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ И АЗИМУТАЛЬНОЙ КООРДИНАТЫ НАДВОДНЫХ ЦЕЛЕЙ РАДИОЛОКАТОРАМИ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2014 |
|
RU2566662C1 |

