ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к системам сбора вибрационных сигналов двигателя и, в частности, сбора вибрационных сигналов для бортовой диагностики двигателя.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Поворотный двигатель подвержен механическим нагрузкам, которые могут вызвать износ его вращающихся элементов. Эффективный способ мониторинга состояния износа или состояния двигателя - измерение вибрации двигателя.
В частности, в случае двигателя летательного аппарата последний включает в себя датчики вибрации типа акселерометра для обнаружения вибраций, передаваемых двигателем. Собранные вибрационные сигналы затем анализируют для обнаружения дефектов или отказов одного или более вращающихся компонентов. Этот анализ включает в себя частотный анализ сигналов, обнаруженных датчиками вибрации.
В настоящее время вибрационный анализ требует операций дискретизации сигнала при одной постоянной очень высокой частоте и операций супердискретизации сигнала при частотах, пропорциональных анализируемым гармоникам и их кратным гармоникам. Кроме того, необходимо применять полосовые фильтры-повторители, очень узко запрограммированные для каждой конкретной из гармоник и управляемые индикаторами скорости вращения двигателя.
Операции передискретизации, необходимые для фильтрации гармоник, требуют выполнения интерполяций, которые очень сложны по объему вычислений и которые должны быть сделаны на очень большом количестве точек. Кроме того, для обеспечения достаточной точности значений фильтрованных интерполированных сигналов важно выполнить сборы на очень высокой частоте.
Наконец, интерполированные сигналы супердискретизируются и требуют выполнения преобразований Фурье на множестве важных точек. Кроме того, операции фильтрации накладывают необходимость частотных анализов на всей ширине полосы сигнала, что является очень дорогостоящим по времени вычисления.
Таким образом, вычислительные мощности бортовой электроники сильно монополизируются всеми этими операциями.
Задачей настоящего изобретения является создание системы и способа сбора в реальном времени вибрационного сигнала без вышеуказанных недостатков, в частности, путем реализации упрощенных вычислений, снижающих требования к электронным средствам.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение описывает систему сбора вибрационного сигнала для диагностики поворотного двигателя, содержащую:
средства ввода для приема временного вибрационного сигнала двигателя и, по меньшей мере, текущей скорости вращения, по меньшей мере, одного вала двигателя и
средства дискретизации для дискретизации в реальном времени временного вибрационного сигнала с, по меньшей мере, одним сигналом дискретизации, синхронизированным с, по меньшей мере, одной текущей скоростью вращения, генерируя таким образом соответствующий синхронный вибрационный сигнал.
Таким образом, посредством дискретизации непосредственно вибрационного сигнала на частотах, пропорциональных вращению двигателя, эта система позволяет свести к минимуму время расчета и объем данных для хранения. Например, в случае двигателя летательного аппарата система сбора может быть с успехом использована для бортовой диагностики двигателя без монополизации процессорного времени или объема памяти бортового вычислительного устройства.
Преимущественно, сигнал дискретизации определен отношением предопределенной максимальной гармоники и отношением предопределенной дискретизации.
Итак, можно заранее определить максимальную гармонику для выделения, упрощая обработку синхронного сигнала вибрации.
Согласно особенности настоящего изобретения, система включает в себя буфер для буферизации выборки, состоящей из предопределенного количества периодов синхронного сигнала вибрации, причем временная длина буфера определяется в зависимости от минимальной гармоники.
Выбор уменьшенного количества опорных точек относительно вращения двигателя позволяет занимать меньший объем памяти, упрощая выделение частотных сигналов.
Преимущественно, система включает в себя вычислительные средства для выделения, из буферизированной выборки, частотных сигналов гармоник, кратных минимальным гармоникам, и частот, пропорциональных соответствующей текущей скорости вращения.
Это позволяет непосредственно выделять желаемые гармоники без использования методов передискретизации или интерполяции.
Преимущественно, вычислительные средства сконфигурированы для выделения частотных сигналов, перемножая буферизированную выборку с коэффициентами Фурье только гармоник для выделения.
Таким образом, это позволяет избежать использования коэффициентов Фурье во всем диапазоне частот.
Согласно предпочтительному варианту осуществления настоящего изобретения, средства ввода сконфигурированы для получения текущих первой и второй скоростей вращения относительно соответственно первого и второго валов двигателя, и средства дискретизации сконфигурированы для непосредственной генерации первого и второго синхронных вибрационных сигналов, дискретизируя в реальном времени временной вибрационный сигнал, соответственно, с первым сигналом дискретизации, синхронизированным с первой текущей скоростью вращения, и вторым сигналом дискретизации, синхронизированным со второй текущей скоростью вращения.
Это позволяет, в случае двигателя летательного аппарата, уменьшить вычисления на борту, когда имеются ограниченные возможности вычисления на вычислительном устройстве на двигателе или на летательном аппарате.
Преимущественно, средства дискретизации сконфигурированы, чтобы непосредственно формировать третий синхронный вибрационный сигнал путем дискретизации в реальном времени временного вибрационного сигнала с третьим сигналом дискретизации, синхронизированным с суммой или разностью первой и второй текущих скоростей вращения, причем третий сигнал дискретизации восстанавливается из тригонометрической комбинации первого и второго сигналов дискретизации.
Таким образом, достаточно простого тригонометрического вычисления для непосредственной генерации синхронного вибрационного сигнала по сумме или разности скоростей вращения.
Система включает в себя первый, второй и третий буферы для буферизации соответственно первой выборки, состоящей из множества предопределенных периодов первого синхронного сигнала вибрации, второй выборки, состоящей из множества предопределенных периодов второго синхронного сигнала вибрации, и третьей выборки, состоящей из множества предопределенных периодов третьего синхронного сигнала, и вычислительные средства сконфигурированы для соответственного выделения на основе первой, второй и третьей буферизированных выборок первых частотных сигналов с частотами, пропорциональными первой текущей скорости вращения, вторых частотных сигналов с частотами, пропорциональными указанной второй текущей скорости вращения, и третьих частотных сигналов с частотами, пропорциональными сумме или разности первой и второй текущих скоростей вращения.
Изобретение также относится к системе мониторинга поворотного двигателя, включающей в себя систему сбора данных по любой из вышеуказанных характеристик и дополнительно включающей в себя средства анализа для анализа частотного(ых) сигнала(ов) для того, чтобы диагностировать состояние двигателя.
Изобретение также относится к способу сбора вибрационного сигнала для диагностики поворотного двигателя, включающему в себя этапы, на которых:
получают временной вибрационный сигнал двигателя и, по меньшей мере, текущую скорость вращения N(t), по меньшей мере, одного вала двигателя и
дискретизируют в реальном времени временной вибрационный сигнал с, по меньшей мере, сигналом дискретизации, синхронизированным с, по меньшей мере, одной текущей скоростью вращения, для генерирования соответствующего синхронного вибрационного сигнала.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие особенности и преимущества настоящего изобретения станут ясны при чтении предпочтительных вариантов осуществления настоящего изобретения со ссылками на прилагаемые чертежи:
фиг. 1 схематически иллюстрирует систему сбора вибрационного сигнала поворотного двигателя в соответствии с изобретением;
фиг. 2A-2B иллюстрируют пример временной дискретизации вибрационного сигнала и извлечение частотных сигналов в соответствии с изобретением;
фиг. 3 иллюстрирует систему мониторинга для бортовой диагностики состояния двигателя воздушного судна в соответствии с изобретением;
фиг. 4 иллюстрирует алгоритм сбора и обработки вибрационного сигнала двигателя в соответствии с изобретением; и
фиг. 5 иллюстрирует блок-схему сбора и обработки вибрационного сигнала двигателя в соответствии с изобретением.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Концепция, лежащая в основе изобретения, основывается на сборе вибрационных сигналов на частотах, непосредственно синхронизированных по сигналам вращения двигателя.
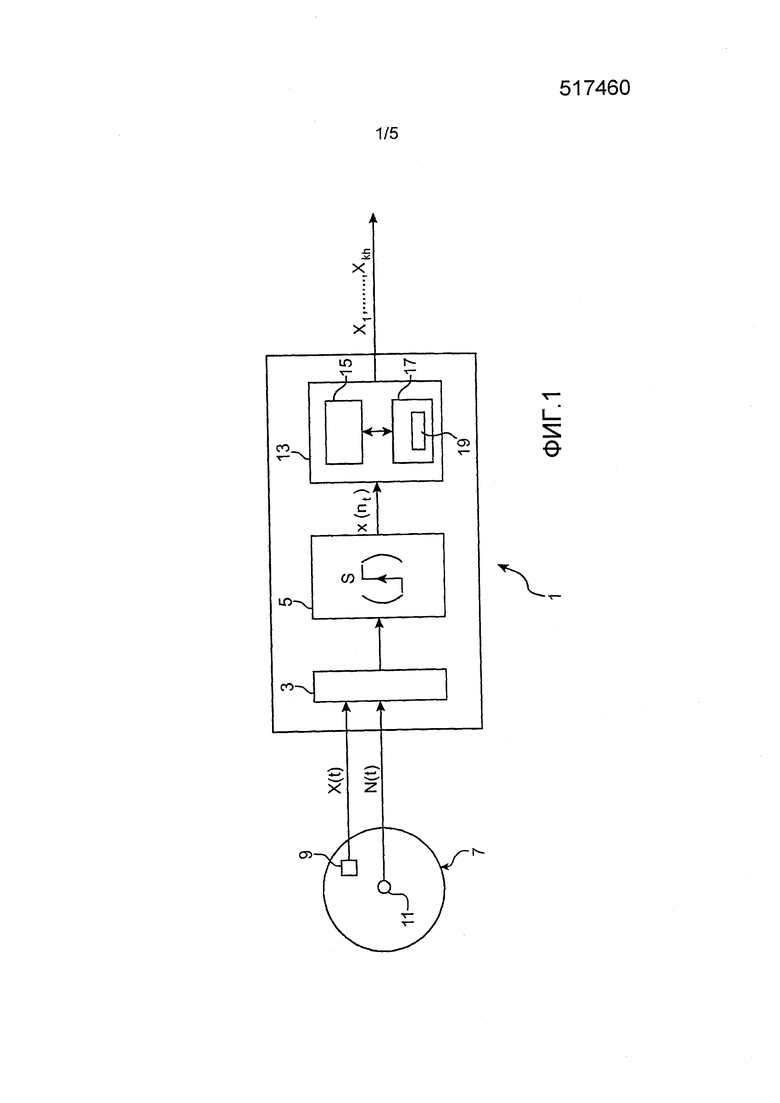
Фиг. 1 схематически иллюстрирует систему сбора вибрационного сигнала роторного двигателя в соответствии с настоящим изобретением.
Система сбора 1 содержит средства ввода 3 и средства дискретизации 5.
Средства ввода 3 сконфигурированы для приема временного вибрационного сигнала X(t), соответствующего рабочему состоянию двигателя 7. Вибрационный сигнал исходит от, по меньшей мере, одного датчика вибрации типа акселерометра 9, установленного на двигателе 7.
Кроме того, средства ввода 3 сконфигурированы для приема, по меньшей мере, скорости вращения N(t), по меньшей мере, одного вала 11 двигателя 7. Следует отметить, что двигатель 7 может включать в себя два или более роторов, включающих в себя валы, вращающиеся с разными скоростями.
Средства дискретизации 5 выполнены с возможностью сопоставления в реальном времени временного вибрационного сигнала X(t) c сигналом дискретизации, синхронизированным с текущей скоростью вращения N(t), генерируя таким образом соответствующий синхронный вибрационный сигнал x(nt).
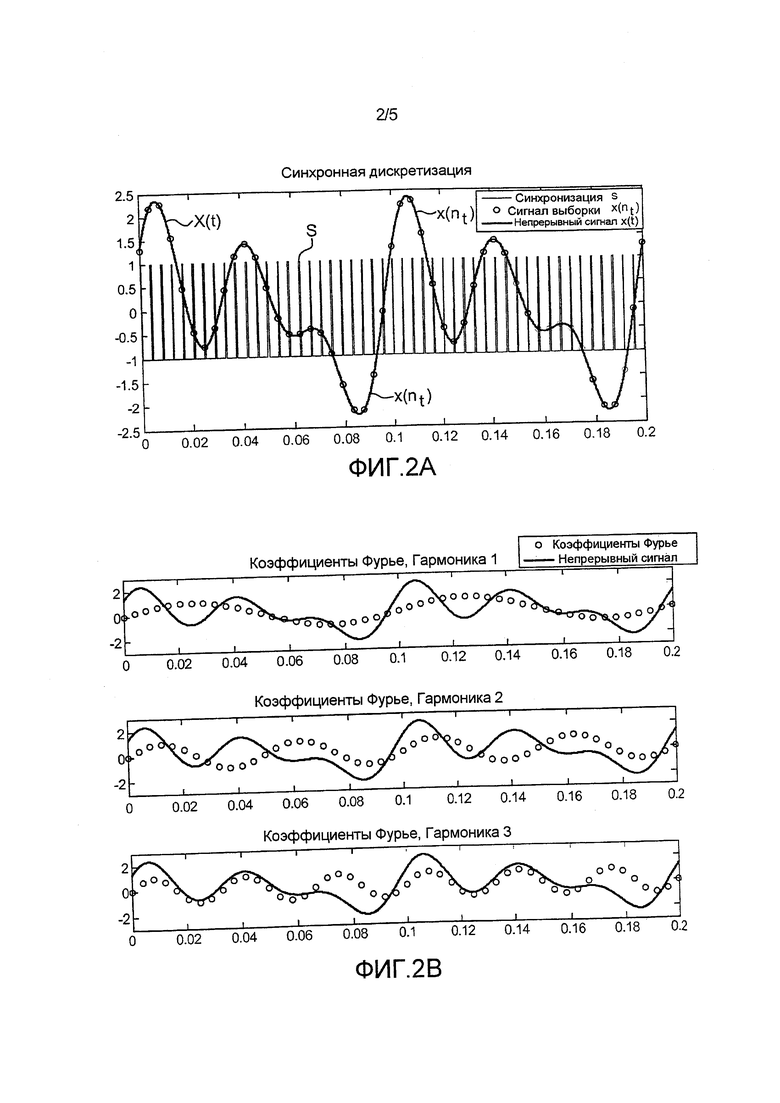
Фиг. 2A иллюстрирует пример дискретизации временного вибрационного сигнала в соответствии с изобретением.
Вибрационный временной сигнал Х(t) является непрерывным во времени сигналом, получаемым, например, на частоте около 250 кГц.
Сигнал дискретизации S представляет собой прямоугольный сигнал, синхронизированный к скорости вращения N(t) двигателя 7. Кроме того, сигнал дискретизации S определен отношением максимальной предопределенной гармоники kh и отношением предопределенной дискретизации r. Таким образом, сигнал дискретизации S имеет частоту Sf=r×N×kh. Другими словами, частота дискретизации изменяется в реальном времени со скоростью вращения двигателя 7 и зависит от максимального порядка гармоники kh, выделяемой гармоники и желаемого минимального количества точек на период (например, от 6 до 8 точек). Согласно примеру на фиг. 2A, максимальная гармоника - три (kh=3), и отношение дискретизации - восемь (r=8).
На каждом переднем фронте временной сигнал вибрации X(t) выбран, чтобы генерировать синхронный сигнал вибрации х(nt). В таком случае сигнал х(nt) - дискретный сигнал, поддискретизированный на частоте, синхронной со скоростью вращения N(t) двигателя 7.
Таким образом, вибрационный временной сигнал X(t) непосредственно преобразуется в цифровой сигнал х(nt), синхронизированный со скоростью вращения N(t) двигателя.
Средства обработки 13 затем используются для применения преобразования Фурье к синхронному вибрационному сигналу х(nt), чтобы выделить частотные сигналы, пропорциональные скорости вращения N(t) двигателя 7.
Средства обработки 13 могут быть включены в систему сбора 1, как проиллюстрировано на фиг. 1. Альтернативно, они могут быть частью другой электронной системы (не показанной) в сочетании с системой сбора 1.
Средства обработки 13 включают в себя вычислительные средства 15 и средства хранения 17, включающие в себя, по меньшей мере, один буфер 19. Средства хранения 17 могут содержать компьютерный программный код для осуществления способа сбора в соответствии с изобретением.
Предпочтительно буфер 19 сконфигурирован для буферизации выборки, состоящей из предопределенного количества периодов синхронного вибрационного сигнала х(nt). Временная длина буфера 19 определяется в зависимости от отношения минимальной гармоники. Пример на фиг. 2A иллюстрирует выборку, состоящую из двух периодов синхронного сигнала вибрации х(nt), соответственно, минимальной гармоники с периодом, равным 0,1 с. Это позволяет экономить объем памяти, так как необходимо хранить в буфере 19 очень ограниченное количество точек синхронного вибрационного сигнала (например, 8 точек на гармонику).
Преимущественно, вычислительные средства 15 сконфигурированы для выделения частотных сигналов X1, …, Xkh путем перемножения буферизированной выборки, точка за точкой, с коэффициентами Фурье только гармоник для выделения, а не по всему диапазону частот. Эти частотные сигналы X1, …, Xkh представляют гармоники, кратные минимальным гармоникам и частотам, пропорциональным соответствующей скорости вращения N(t) (см. фиг. 2B).
Фиг. 2B иллюстрирует пример действительных частей коэффициентов Фурье гармоник 1, 2 и 3, применяемых к буферизированной выборке, представленной на фиг.2А, для выделения трех частотных сигналов X11, X12 и X13 порядка kh=1, kh=2 и kh=3, соответственно. Мнимые части (не показаны) коэффициентов Фурье сдвинуты на π/2.
Таким образом, настоящее изобретение позволяет непосредственно выделять гармонические составляющие на частотах, кратных частоте вращения двигателя, за очень уменьшенное количество операций, без интерполяции, и храня в памяти очень небольшое количество точек. Это позволяет в достаточной мере сэкономить время вычислений и объем памяти.
Следует отметить, что система и способ сбора применимы к любому типу поворотного двигателя. В случае, описанном ниже, сосредоточимся более конкретно на сборе вибрационного сигнала для бортовой диагностики двигателя летательного аппарата.
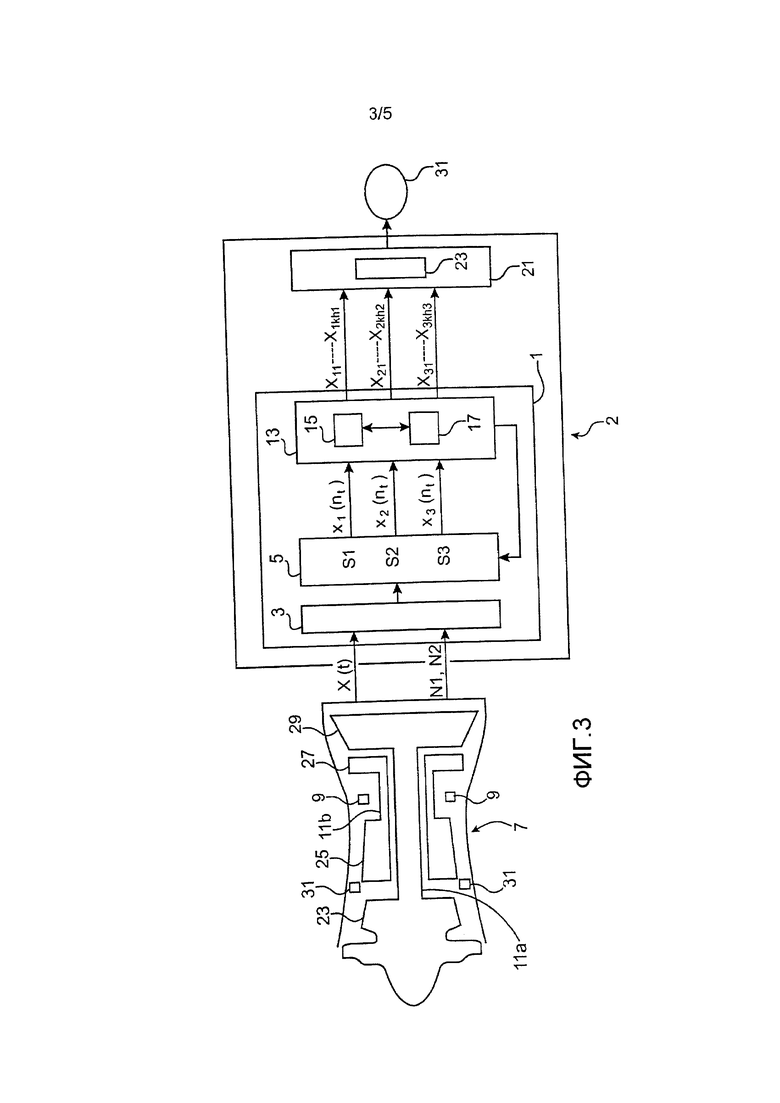
Фиг. 3 иллюстрирует систему мониторинга для бортовой диагностики состояния двигателя летательного аппарата в соответствии с изобретением.
Система мониторинга 2 содержит систему сбора 1 и систему 21 обнаружения дефектов.
Двигатель 7 летательного аппарата включает в себя компрессор 23 низкого давления, расположенный перед компрессором 25 высокого давления, также как турбина 27 высокого давления расположена перед турбиной 29 низкого давления. Компрессор 23 и турбина 29 низкого давления соединены посредством первого вала 11a скорости вращения N1. Аналогично, компрессор 25 и турбина 27 высокого давления соединены посредством второго вала 11b скорости вращения N2. Второй вал 11b представляет собой трубу, коаксиальную к первому валу 11a, и два вала разделены межваловыми подшипниками качения (не показаны). Два вала 11а, 11b могут вращаться в противоположных направлениях, и подшипники тогда представляют скорость вращения N1+N2. Альтернативно, два вала могут вращаться в одном направлении, и межваловые подшипники представляют скорость вращения N1-N2.
Датчики 9 вибрации типа акселерометра размещены в двигателе 7 для обнаружения вибраций, передаваемых последним. Кроме того, двигатель 7 включает в себя датчики 31 для измерения первой и второй скоростей вращения N1, N2 первого и второго валов 11а, 11b соответственно.
Таким образом, чтобы правильно диагностировать состояние двигателя 7 в действии, настоящее изобретение предлагает выделить непосредственно и в реальном времени три группы частотных сигналов, пропорциональных соответственно скоростям вращения N1, N2 и N1+N2, для обнаружения в реальном времени ненормального функционирования одного из компонентов двигателя 7.
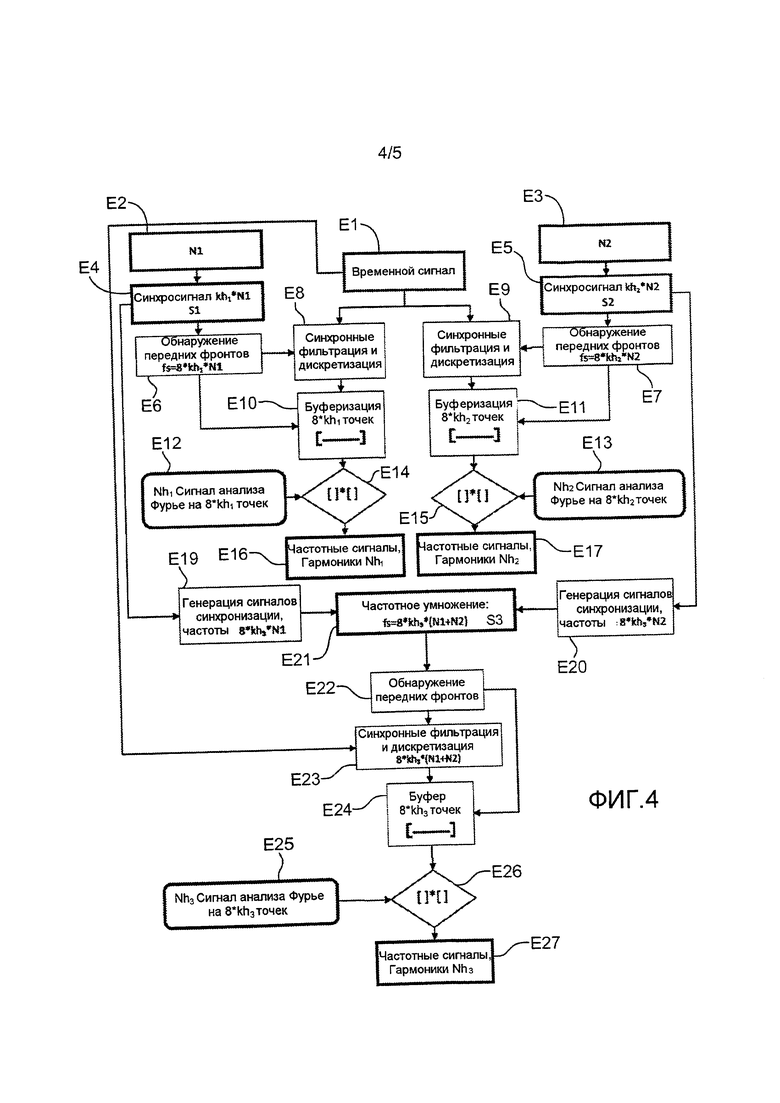
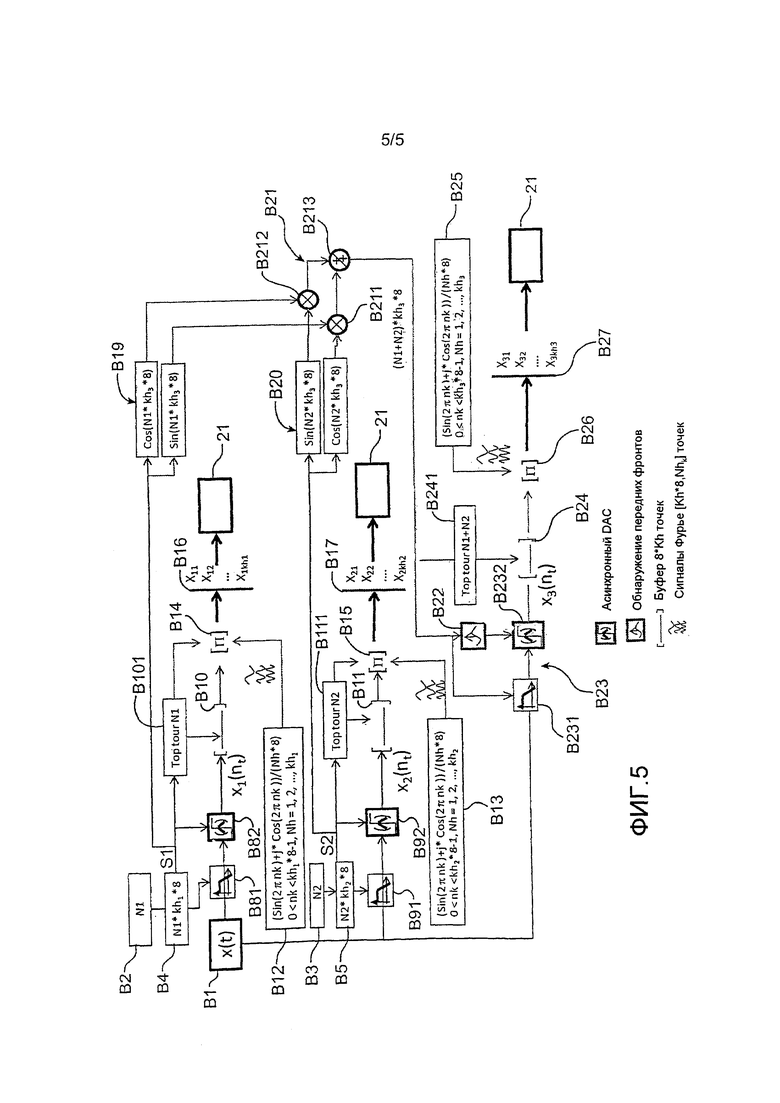
Фиг. 4 и 5 иллюстрируют соответственно алгоритм и блок-схему сбора и обработки вибрационного сигнала двигателя в соответствии с фиг. 3.
На этапах E1-E3 (блоки B1-B3) средства ввода 3 получают, в течение заданного периода работы двигателя 7, временной вибрационный сигнал X(t), соответствующий состоянию работы двигателя, и первую и вторую текущие скорости N1(t), N2(t), относящиеся соответственно к первому и второму валу 11a, 11b двигателя 7.
Предварительно определенный период, в течение которого получаются временные вибрационные сигналы Х(t) и текущие скорости N1(t) и N2(t), может, к примеру, соответствовать конкретному этапу полета или полному полету.
На этапах E4-E9 (блоки B4-B9) средства 5 дискретизации сконфигурированы, чтобы непосредственно генерировать первый и второй синхронные вибрационные сигналы x1(nt) и x2(nt) путем дискретизации в реальном времени временного вибрационного сигнала X(t) с, соответственно, первым сигналом S1 дискретизации, синхронизированным с первой текущей скоростью вращения N1(t), и вторым сигналом S2 дискретизации, синхронизированным со второй текущей скоростью вращения N2(t).
В частности, на этапах E4 и E5 (блоки В4 и В5) генерируются первый и второй сигналы дискретизации.
Первый сигнал S1 дискретизации представляет частоту, определенную в зависимости от первой скорости N1, относительно максимальной предопределенной гармоники kh и относительно предопределенной дискретизации r. Например, частота первого сигнала дискретизации является Sf1=8×N1×kh1. Отношение дискретизации здесь выбрано равным восьми, чтобы облегчить расчеты преобразований Фурье.
Аналогично, второй сигнал S2 дискретизации представляет собой сигнал, частота которого определяется в зависимости от второй скорости N2, предопределенного отношения kh2 максимальной гармоники и предопределенного отношения r дискретизации. Например, частота второго сигнала дискретизации является Sf2=8×N2×kh2.
На этапах Е6 и Е7 детектируют передние фронты первого и второго сигналов S1, S2, чтобы сформировать прямоугольные сигналы для дискретизации временного вибрационного сигнала X(t).
На этапе E8 (блоки B81, B82) временной сигнал X(t) сначала фильтруется с помощью первого фильтра нижних частот B81, частота среза которого зависит от максимальной частоты гармоники kh1 для выделения. Альтернативно, первый фильтр нижних частот B81 управляется первым сигналом дискретизации S1, мгновенная частота которого пропорциональна первой скорости вращения N1(t). Фильтрация вибрационного сигнала X(t) в начале дискретизации позволяет избежать риска спектрального наложения.
Ранее отфильтрованный вибрационный сигнал X(t) затем дискретизируется первым асинхронным аналого-цифровым преобразователем DAC B82 по каждому переднему фронту первого сигнала дискретизации для генерации первого синхронного вибрационного сигнала х1(nt).
Аналогично, на этапе E9 (блоки B91, B92) временной сигнал Х(t) фильтруется с помощью второго фильтра нижних частот В92, частота среза которого зависит от максимальной частоты гармоники kh2 для выделения, либо управляется вторым сигналом S2 дискретизации, мгновенная частота которого пропорциональна второй скорости вращения N2(t). Фильтрованный вибрационный сигнал X(t) затем дискретизируется с помощью второго асинхронного DAC В92 по второму сигналу S2 дискретизации для генерации второго синхронного вибрационного сигнала х2(nt).
Сигналы х1(nt), х2(nt) являются сигналами, соответственно синхронизированными со скоростями вращения N1 и N2.
На этапе E10 (блок B10) первая дискретизация, состоящая из предопределенного количества периодов первого синхронного вибрационного сигнала х1(nt), буферизируется в первый буфер B10, временная длина которого определяется в зависимости от минимальной гармоники h1.
Аналогично, на этапе E11 (блок B11) вторая дискретизация, состоящая из предопределенного количества периодов второго синхронного вибрационного сигнала х2(nt), буферизируется во второй буфер B11, временная длина которого определяется в зависимости от минимальной гармоники h2.
Первый и второй буферы B10, B11 соответственно запускаются при каждом верхнем круге вращений N1 и N2 (блоки B101, B111). В итоге вычисления после преобразований Фурье осуществляются на частотах, кратных скорости обновления буферов. Частоты выполнения этих вычислений синхронизированы со скоростью вращения валов двигателя.
На этапах E12-E17 (блоки B12-B17) вычислительные средства будут выделять первую и вторую группы частотных сигналов X11, …, X1kh1 и X21, …, X2kh2.
В частности, на этапе E12 (блок B12) средства вычисления 15 генерируют первые коэффициенты Фурье только гармоник для выделения, связанных с первой скоростью вращения N1: (sin(2πnk)+jcos(2πnk))/8×Nh, приращение анализа Фурье nk, удовлетворяющее 0<nk<kh1×8-1; Nh - это номер гармоники, вычисленной с Nh=1, 2, …kh1, и kh1 - максимальный порядок гармоники, которая будет проанализирована для скорости вращения N1.
На этапе E13 (блок B13) средства вычисления 15 генерируют вторые коэффициенты Фурье только гармоник для выделения, связанных со второй скоростью вращения N2: (sin(2πnk)+jcos(2πnk))/8×Nh, приращение анализа Фурье nk, удовлетворяющее 0<nk<kh1×8-1; Nh является номером гармоники, вычисленной с Nh=1, 2, …, kh2, и kh2 является максимальным порядком гармоники анализа для скорости вращения N2.
На этапе E14 (блок B14) первые коэффициенты Фурье матрично перемножаются с первой выборкой первого синхронного вибрационного сигнала х1(nt) для генерации первой группы частотных сигналов X11, …, X1kh1 (E16, В16).
На этапе E15 (блок B15) вторые коэффициенты Фурье матрично перемножаются со второй выборкой второго синхронного вибрационного сигнала х2(nt) для генерации второй группы частотных сигналов X21, …, X2kh2 (E17, B17).
На этапах E19-E27 (блоки B19-B27) средства дискретизации 5 дополнительно конфигурируются для непосредственной генерации третьего синхронного вибрационного сигнала х3(nt), дискретизируя в реальном времени временной вибрационный сигнал X(t) с третьим сигналом дискретизации S3, синхронизированным с суммой N1+N2 первой и второй текущих скоростей вращения.
На этапах E19-E21 третий сигнал S3 дискретизации восстанавливается средствами обработки 13 посредством тригонометрической комбинации первого и второго сигналов дискретизации S1, S2.
Действительно, на этапе E19 (блок В19) генерируется первый промежуточный сигнал синхронизации, частота которого определяется в зависимости от первой скорости N1 и предопределенной максимальной гармоники kh3. В частности, из первого сигнала дискретизации (этап E4, блок B4) генерируется синусоидальный сигнал в синусе и синусоидальный сигнал в косинусе с частотой N1*kh3*8: sin(8×N1×kh3) и cos(8×N1×kh3).
Аналогично, на этапе E20 (блок B20) генерируется второй промежуточный сигнал синхронизации, частота которого определяется в зависимости от второй скорости N2 и предопределенной максимальной гармоники kh3. В частности, из второго сигнала дискретизации (этап E5, блок B5) генерируется синусоидальный сигнал в синусе и синусоидальный сигнал в косинусе с частотой N2*kh3*8: sin(8×N2×kh3) и cos(8×N2×kh3).
На этапе E21 умножаются (B211, B212), с одной стороны, sin(8×N1×kh3) этапа E19 с cos(8×N2×kh3) этапа E20, а с другой, cos(8×N1×kh3) этапа E19 с sin(8×N2×kh3) этапа E20, чтобы соответственно сформировать сигнал sin(8×N1×kh3)×cos(8×N2×kh3) и cos(8×N1×kh3)×sin(8×N2×kh3). В блоке B213 добавляются эти два последних сигнала, чтобы сформировать сигнал вида sin(8×kh3×(N1+N2)). Из этого последнего сигнала определяется третий сигнал S3 дискретизации, частота которого определяется в зависимости от суммы первой скорости N1 и второй скорости N2 так же, как предопределенное максимальное отношение гармоники kh3 и предопределенное отношение дискретизации r (здесь r=8).
Заметим, что если первый и второй валы двигателя 11a, 11b вращаются в одном направлении, достаточно заменить сложение блока B213 на вычитание для генерирования сигнала дискретизации, частота которого определяется в зависимости от разности между первой скоростью N1 и второй скоростью N2.
На этапе E22 (блок B22) извлекаются передние фронты третьего сигнала дискретизации для формирования прямоугольного сигнала, позволяющего дискретизировать временной сигнал X(t).
Действительно, на этапе E23 (блоки B231, B232) временной вибрационный сигнал X(t) сначала фильтруется с использованием третьего фильтра нижних частот B231, частота среза которого является функцией максимальной частоты гармоники kh3 для выделения. Кроме того, третий фильтр нижних частот B231 управляется третьим сигналом S3 дискретизации. Фильтрованный вибрационный сигнал X(t) затем дискретизируется третьей асинхронной DAC B232 по третьему сигналу S3 дискретизации для генерации третьего синхронного вибрационного сигнала х3(nt). Таким образом, сигнал х3(nt) является дискретным сигналом, синхронизированным со скоростью вращения N1+N2.
На этапе E24 (блок B24) третья дискретизация, состоящая из предопределенного количества (множества) периодов третьего синхронного вибрационного сигнала x3(nt), буферизируется в третий буфер B24, временная длина которого определяется в зависимости от отношения минимальной гармоники h3. Третий буфер B24 срабатывает в каждом верхнем круге вращений N1+N2 (блок B241).
На этапе E25 (блок B25) вычислительные средства 13 генерируют третьи коэффициенты Фурье только для извлекаемых гармоник от частоты вращения N1+N2: (sin(2πnk)+jcos(2πnk))/8×Nh, приращение nk анализа Фурье, лежащее в пределах 0<nk<kh3×8-1; Nh - это номер вычисляемой гармоники с Nh=1, 2, …, kh3, и kh3 - максимальный порядок гармоники, которая будет проанализирована для скорости вращения N1+N2.
На этапе E26 (блок B26) третьи коэффициенты Фурье матрично перемножаются с третьей выборкой третьего синхронного вибрационного сигнала x3(nt) для генерации третьей группы частотных сигналов X31, …, X3kh3 (E27, B27).
Система или способ в соответствии с изобретением не использует операции над- или поддискретизации и использует упрощенные вычисления преобразований Фурье FFT. В результате извлекаются только соответствующие гармонические сигналы для диагностики двигателей с минимумом вычислений и памяти. Кроме того, он не использует фильтры-повторители.
Таким образом, требуемая производительность бортовой электроники (ОЗУ, вычислительная скорость) снижается. Кроме того, индуцированный перегрев уменьшается и рабочие диапазоны увеличиваются.
Кроме того, первая, вторая и третья группы частотных сигналов позволяют диагностировать соответственно первый вал, второй вал и межваловые подшипники качения двигателя.
Действительно, система обнаружения 21 (см. фиг. 3) восстанавливает в реальном времени первую, вторую и третью группы частотных сигналов для анализа. Система 21 обнаружения содержит средство анализа 23 для, например, корреляции частотных сигналов с другими сигналами или сравнения их с заданными пороговыми значениями для мониторинга в реальном времени состояния двигателя 7. Система обнаружения может, например, контролировать изменение амплитуды различных гармоник частотных сигналов относительно соответствующих относительных порогов. Превышение порога может, таким образом, вызвать тревогу или предупреждающие сообщения 31.
Кроме того, анализ частотных сигналов может выполняться автономно, что дополнительно минимизирует время вычисления во время полета.
Предпочтительно, чтобы первая, вторая и третья группы частотных сигналов могли быть сохранены от полета к полету в базе данных для анализа изменения со временем состояния двигателя 7.
Отметим, что система мониторинга может быть встроена в специфический корпус или стать частью существующего электронного блока. Преимущественно, можно использовать средства сбора и обработки бортового вычислительного устройства воздушного судна или вычислительного устройства, встроенного в двигатель летательного аппарата типа EMU (Engine Monitoring Unit) для использования системы сбора сигналов вибрации и диагностики двигателя в соответствии с изобретением.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ПОВРЕЖДЕНИЯ ОПОРНОГО ПОДШИПНИКА КАЧЕНИЯ ДВИГАТЕЛЯ | 2008 |
|
RU2449252C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОВРЕЖДЕНИЯ, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО ОПОРНОГО ПОДШИПНИКА ДВИГАТЕЛЯ | 2010 |
|
RU2558007C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ И ВЯЗКОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2349897C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА С НЕИЗВЕСТНЫМИ ПАРАМЕТРАМИ | 1999 |
|
RU2154837C1 |
| СПОСОБ ИЗМЕРЕНИЯ СИГНАЛОВ ПРОИЗВОЛЬНОЙ ФОРМЫ В ПРИСУТСТВИИ СЛУЧАЙНЫХ ШУМОВ | 1997 |
|
RU2133474C1 |
| СПОСОБ ВИБРАЦИОННОЙ ДИАГНОСТИКИ ШЕСТЕРЁН РЕДУКТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2016 |
|
RU2643696C1 |
| СПОСОБ И СИСТЕМА КОНТРОЛЯ ВИБРАЦИОННЫХ ЯВЛЕНИЙ, ПОЯВЛЯЮЩИХСЯ В ГАЗОТУРБИННОМ ДВИГАТЕЛЕ ЛЕТАТЕЛЬНОГО АППАРАТА ВО ВРЕМЯ РАБОТЫ | 2010 |
|
RU2512610C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ УЗКОПОЛОСНЫХ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ ВЫЧИСЛЕНИЯ ИНТЕГРАЛЬНОГО ВЕЙВЛЕТ-СПЕКТРА | 2007 |
|
RU2367970C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ В ВИДЕ ЗВУКОРЯДА НА ОСНОВЕ ВЫЧИСЛЕНИЯ ИНТЕГРАЛЬНОГО ВЕЙВЛЕТ-СПЕКТРА | 2011 |
|
RU2464588C1 |
| Способ обнаружения дефектов подшипников турбокомпрессора | 1990 |
|
SU1784851A1 |
Изобретение относится к метрологии, в частности к устройствам вибрационной диагностики двигателей. Устройство содержит датчики вибрации и скорости вращения вала двигателя, cхему приема вибрационного сигнала и величины скорости вращения. Также устройство содержит средство дискретизации для дискретизации в реальном времени вибрационного сигнала с сигналом дискретизации. Сигнал дискретизации синхронизирован с одной текущей скоростью вращения, генерируя таким образом соответствующий синхронный вибрационный сигнал. При этом сигнал дискретизации вычисляется на основе величин отношения максимальной гармоники, отношения дискретизации и скорости вращения вала двигателя. Устройство также содержит средство буферизации выборки, временная длина буфера выбирается в зависимости от отношения минимальной гармоники. Устройство выполнено с возможностью выделения из буферизированной выборки частотных сигналов гармоник, кратных минимальной гармонике, с частотами, пропорциональными соответствующей текущей скорости вращения путем перемножения буферизированной выборки с коэффициентами Фурье. Технический результат – сокращение объемов требуемой памяти, снижение вычислительных затрат. 3 н. и 6 з.п. ф-лы, 5 ил.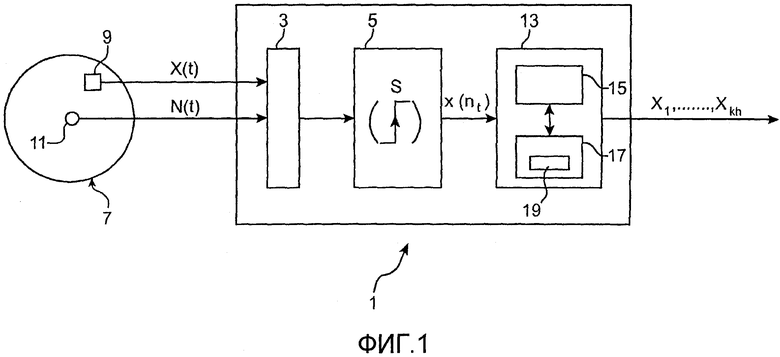
1. Система сбора вибрационного сигнала для диагностики поворотного двигателя (7), отличающаяся тем, что содержит:
средства ввода (3) для приема временного вибрационного сигнала (X(t)) двигателя и, по меньшей мере, текущей скорости (N(t)) вращения, по меньшей мере, одного вала (11) двигателя и
средства (5) дискретизации для дискретизации в реальном времени вибрационного сигнала (X(t)) с, по меньшей мере, одним сигналом (S) дискретизации, синхронизированным с, по меньшей мере, одной текущей скоростью вращения, генерируя таким образом соответствующий синхронный вибрационный сигнал (x(nt)), причем сигнал (S) дискретизации определен предопределенным отношением максимальной гармоники и предопределенным отношением дискретизации.
2. Система по п. 1, отличающаяся тем, что содержит буфер (19) для буферизации выборки, состоящей из предопределенного количества периодов синхронного сигнала вибрации, причем временная длина буфера определена в зависимости от отношения минимальной гармоники.
3. Система по п. 2, отличающаяся тем, что содержит вычислительные средства (15) для выделения из буферизированной выборки частотных сигналов (X1,..., Xkh) гармоник, кратных минимальной гармонике, и с частотами, пропорциональными соответствующей текущей скорости вращения.
4. Система по п. 3, отличающаяся тем, что вычислительные средства (15) сконфигурированы для выделения частотных сигналов (X1,..., Xkh) перемножением буферизированной выборки с коэффициентами Фурье только выделяемых гармоник.
5. Система по любому из пп. 1-4, отличающаяся тем, что средства ввода (3) сконфигурированы для получения текущих первой и второй скоростей вращения (N1(t), N2(t)) относительно соответственно первого и второго валов двигателя, и
средства дискретизации (5; B82, B92) сконфигурированы для непосредственной генерации первого и второго синхронных вибрационных сигналов (x1(nt), x2(nt)), дискретизируя в реальном времени временной вибрационный сигнал (X(t)) с соответственно первым сигналом (S1) дискретизации, синхронизированным с первой текущей скоростью вращения, и вторым сигналом (S2) дискретизации, синхронизированным со второй текущей скоростью вращения.
6. Система по п. 5, отличающаяся тем, что средства (5; B232) дискретизации сконфигурированы, чтобы непосредственно сгенерировать третий синхронный вибрационный сигнал(x3(nt)) путем дискретизации в реальном времени временного вибрационного сигнала с третьим сигналом (S3) дискретизации, синхронизированным с суммой или разностью первой и второй текущих скоростей вращения, причем третий сигнал дискретизации восстанавливается из тригонометрической комбинации первого и второго сигналов дискретизации.
7. Система по п. 6, отличающаяся тем, что содержит первый, второй и третий буферы (B10, B11, B24) для буферизации соответственно первой выборки, состоящей из множества предопределенных периодов первого синхронного сигнала (x1(nt)) вибрации, второй выборки, состоящей из множества предопределенных периодов второго синхронного сигнала (x2(nt)) вибрации, и третьей выборки, состоящей из множества предопределенных периодов третьего синхронного сигнала (x3(nt)), и тем, что вычислительные средства сконфигурированы для соответственного выделения на основе первой, второй и третьей буферизированных выборок первых частотных сигналов (X11,..., X1kh) с частотами, пропорциональными первой текущей скорости вращения, вторых частотных сигналов (X11,..., X1kh) с частотами, пропорциональными второй текущей скорости вращения, и третьих частотных сигналов (X11,..., X1kh) с частотами, пропорциональными сумме или разности первой и второй текущих скоростей вращения.
8. Система мониторинга поворотного двигателя, содержащая систему сбора по любому из пп. 1-7, отличающаяся тем, что она дополнительно включает в себя средства (23) анализа для анализа частотного(ых) сигнала(ов), для того чтобы диагностировать состояние двигателя.
9. Способ сбора вибрационного сигнала для диагностики поворотного двигателя, отличающийся тем, что включает в себя этапы, на которых:
получают временной вибрационный сигнал (X(t)) двигателя и, по меньшей мере, текущую скорость (N(t)) вращения, по меньшей мере, одного вала двигателя и
дискретизируют в реальном времени временной вибрационный сигнал с, по меньшей мере, сигналом (S) дискретизации, синхронизированным с, по меньшей мере, одной текущей скоростью вращения для генерирования соответствующего синхронного вибрационного сигнала (x(nt)), причем сигнал (S) дискретизации определен отношением предопределенной максимальной гармоники и отношением предопределенной дискретизации.
| WO 2011054867 A1, 12.05.2011 | |||
| US 20090322578 A1, 31.12.2009 | |||
| US 20100071469 A1, 25.03.2010 | |||
| WO 2010006323 A2, 14.01.2010 | |||
| US 5197010 A, 23.03.1993 | |||
| WO 1995030134 A1, 09.11.1995 | |||
| RU 2008109257 A, 20.09.2009 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕРИОДА ГАРМОНИЧЕСКОГО СИГНАЛА | 1989 |
|
RU2026560C1 |

