Изобретение относится к радиолокации и может быть использовано в радиолокационной технике для обнаружения линейно-частотно-модулированного (ЛЧМ) сигнала с неизвестными параметрами в импульсно-доплеровских радиолокационных станциях (ИД РЛС).
Известен способ обнаружения ЛЧМ-сигнала, заключающийся в том, что производят многоканальную обработку сигнала в пространстве его частоты и ее производной [1].
Недостатком данного способа является невозможность его реализации для протяженных областей параметров, что приводит к большому числу каналов обработки сигнала.
Наиболее близким к предлагаемому изобретению является способ, заключающийся в том, что осуществляют аналого-цифровое преобразование (АЦП) сигнала, вычисляют корреляционные суммы выборки сигнала и опорных комплексных линейно-частотно-модулированных сигналов, фазы действительной и мнимой частей которых сдвинуты на девяносто градусов, в узлах сетки, покрывающей область возможных значений частоты сигнала и ее производной, определяют максимум модуля корреляционной суммы по узлам сетки, сравнивают значение максимума модуля корреляционной суммы с порогом, при этом корреляционные суммы вычисляют в узлах прямоугольной сетки (fi, f'j),
где i = 0...N-1;
j = 0...N2-1; fi=i/T - частота опорного сигнала в узлах с индексом i; производная частоты опорного сигнала в узлах с индексом j;
производная частоты опорного сигнала в узлах с индексом j;
T - длительность выборки сигнала;
N - размер выборки сигнала,
путем умножения сигнальных отсчетов на фазовые множители  соответствующие значению производной частоты f'j,
соответствующие значению производной частоты f'j,
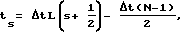
где  время n-го отсчета;
время n-го отсчета;
n = 0...N-1;
Δt - период дискретизации выборки сигнала,
и применения быстрого преобразования Фурье (БПФ), вычисляющего значения корреляционной суммы во всех узлах с одинаковым индексом j [2].
Недостатком данного способа являются значительные вычислительные ресурсы при его реализации в случае большого размера сигнальной выборки и широкого диапазона изменения частоты сигнала и ее производной.
Цель изобретения - снижение вычислительных ресурсов при обнаружении ЛЧМ-сигнала с широким диапазоном изменения его параметров: частоты и ее производной.
Предлагаемый способ заключается в следующем.
Осуществляют АЦП сигнала, разбивают выборку сигнала на S сегментов одинаковой длины L, причем величина S должна быть не менее восьми, кратна четырем и удовлетворять условию
f'maxT2 < S2, (1)
где f'max - максимальное абсолютное значение производной частоты сигнала,
вычисляют отсчеты дискретного преобразования Фурье (ДПФ) сегментов по алгоритму БПФ, вычисляют корреляционные суммы выборки сигнала и опорных комплексных ЛЧМ-сигналов, фазы действительной и мнимой частей которых сдвинуты на девяносто градусов, в узлах сетки гексагонального типа (fij, f'ij), i = 0. . . N1 - 1, j = 0...N2 - 1, с периодами 0.8/T и 6/T2 по частоте опорного сигнала и производной частоты соответственно, где fij, f'ij - значения частоты и ее производной в узле с индексом (ij); N1- количество отсчетов частоты; N2 - количество отсчетов производной частоты, по формуле
s = 0...S-1, k = 0...L-1,

Фs = Ф(ts),
 (2)
(2)
fs = f+f′ts,
где Z(f,f') - значение корреляционной суммы;
f - частота опорного сигнала;
f' - производная частоты опорного сигнала;
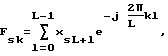
Fsk - k-й отсчет дискретного преобразования Фурье s-го сегмента;
gs, g's - комплексные коэффициенты;
ks, k's - номера отсчетов дискретного преобразования Фурье s-го сегмента, которые учитываются в корреляционной сумме;
xn - значения отсчетов выборки сигнала, n=0...N-1;
Ф(t) - зависимость фазы опорного сигнала от времени,
предварительно вычисляют и сохраняют в памяти номера отсчетов ks, k's и значения комплексных коэффициентов gs, g's для узлов с индексами i = 0... 5S/4-1, j = 0...N2-1, остальные номера отсчетов и комплексные коэффициенты вычисляют по формулам


где после вертикальной черты указаны индексы узлов, определяют максимум модуля корреляционной суммы по узлам сетки, сравнивают значение максимума модуля корреляционной суммы с порогом.
Новыми признаками, обладающими существенными отличиями, являются следующие.
1. Выборку сигнала разбивают на S сегментов одинаковой длины. Величина S должна быть не менее восьми и кратна четырем, а также удовлетворять условию f'maxT2 < S2. На основе алгоритма БПФ вычисляют значения ДПФ сегментов.
2. Корреляционные суммы вычисляют в узлах сетки гексагонального типа (fij, f'ij), i = 0...N1 - 1, j = 0...N2 - 1, с периодами d = 0.8/T, d' = 6/T2 по частоте и производной частоты соответственно, путем суммирования отсчетов ДПФ сегментов, умноженных на комплексные коэффициенты, при этом от каждого сегмента в сумме учитывается один или два отсчета ДПФ сегмента.
3. Комплексные коэффициенты в корреляционной сумме для узлов с номерами i = 0...5S/4-1, j = 0...N2-1 заранее вычисляют и сохраняют в памяти. Комплексные коэффициенты с номерами i ≥ 5S/4 вычисляют путем использования соответствующих значений коэффициентов с номерами i = 0...5S/4-1.
На фиг. 1 приведены пояснения к правилу выбора отсчетов ДПФ сегментов, учитываемых в корреляционной сумме; на фиг. 2 - линии уровня функции рассогласования ЛЧМ-сигнала в пространстве частоты и ее производной; на фиг. 3 - зависимости коэффициента выигрыша по вычислительным затратам от размеров области изменения параметров; на фиг. 4 - схема устройства обнаружения ЛЧМ-сигналов.
Пример оценки влияния отличительных признаков на технический результат.
В ИД РЛС цели облучаются сигналами, представляющими из себя пачки радиоимпульсов, излучаемые с определенной частотой повторения. При отражении от воздушной цели несущая частота радиоимпульсов сдвигается на доплеровскую частоту. Частота повторения радиоимпульсов выбирается из условия превышения возможных величин доплеровских частот. В аналоговой части приемника (в каждом канале дальности) сигнал подвергается фильтрации в области спектра возможных доплеровских частот так, что на выходе импульсная структура разрушается, и сигнал можно рассматривать как протяженный одиночный радиоимпульс с длительностью, равной длительности всей пачки. При отражении от маневрирующей цели, имеющей радиальное ускорение, радиоимпульсы преобразуются в ЛЧМ-сигнал [3]. Таким образом, задача обнаружения маневрирующей цели сводится к задаче обнаружения ЛЧМ-сигналов на фоне шумов. В качестве исходных данных используется следующая выборка сигнальных отсчетов с выхода АЦП
xn = sn+ξn, n = 0...N-1, (3)
где  отсчеты сигнала;
отсчеты сигнала;
ξn - отсчеты шума, статистически независимые и распределенные по нормальному закону с нулевым средним и дисперсией σ2;
U, f, f' и Ф0 - неизвестные параметры: амплитуда, частота, производная частоты и фаза сигнала соответственно;
N - количество отсчетов; моменты времени отсчетов;
моменты времени отсчетов;
T = ΔtN - - длительность выборки.
Временной интервал расположен симметрично относительно нуля. Значения параметров f и f'находятся в известных интервалах [fa, fb] и [f'a, f'b] соответственно.
Обнаружение сигнала производится методом отношения правдоподобия (ОП) по правилу [4]: при Z > v принимается решение о наличии цели, иначе - о ее отсутствии. Величина Z определяется следующим выражением
где  корреляционная сумма (комплексная), зависящая от вектора параметров (f, f');
корреляционная сумма (комплексная), зависящая от вектора параметров (f, f');
u(tn|f,f′) = exp(-jФ(tn)) - выборка опорного комплексного сигнала; фаза опорного сигнала;
фаза опорного сигнала;
v - порог, значение которого выбирается из уровня вероятности ложных тревог.
Для вычисления корреляционных сумм выборка сигнала xn, n = 0...N-1, разбивается на S сегментов одинаковой длины L. В s-ый сегмент входят отсчеты xsL+1, 1 = 0...L-1, s = 0...S-1. На основе алгоритма БПФ вычисляются значения ДПФ сегментов
Используя обратное ДПФ, можно выразить отсчеты сигнала в сегментах через величины отсчетов ДПФ сегментов Fsk
Подставим выражение (6) в (4), получим
где Фs - значение фазы опорного сигнала в середине сегмента (в момент времени ts, (соотношения (2))).
Величина f'max удовлетворяет соотношению (1), которое означает, что девиация частоты сигнала на интервале одного сегмента не превышает шага частоты ДПФ сегмента, равного 1/(ΔtL). B силу этого соотношения величину фазы опорного сигнала для s-того сегмента приближенно можно вычислять по формуле
С учетом соотношения (8) выражение (7) принимает вид
где коэффициенты gsk определяются по соотношениям (2).
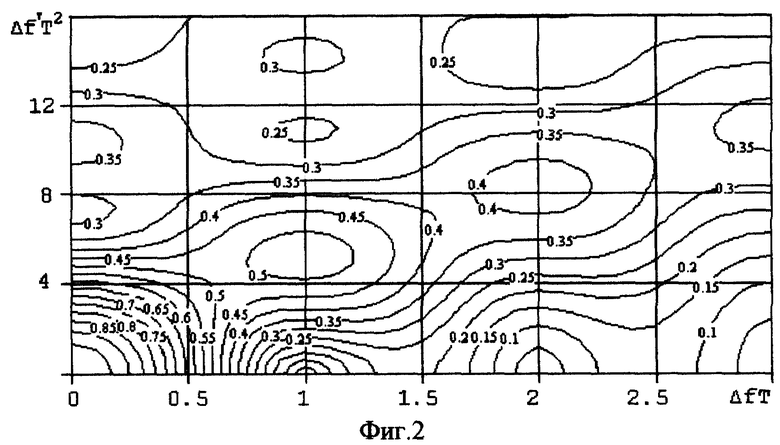
Дальнейшие упрощения выражения (9) связаны с тем, что в сумме по k учитываются один или два слагаемых в соответствии со следующим правилом. Для каждого s-того сегмента определяется номер ks
Если |ks-fsΔtL| < 0,3, то в сумме по k в выражении (9) учитывается один член с номером ks. В противном случае из двух номеров ks ± 1 выбирается ближайший к величине fsΔtL номер, который обозначается как k's. Тогда в сумме по k в выражении (9) учитываются слагаемые с номерами ks и k's. Пояснения к данному правилу показаны на фиг. 1, где приведена зависимость мгновенной частоты сигнала от времени (наклонная прямая линия). Ось времени разделена на сегменты, а ось частот - на частотные дискрета ДПФ сегментов так, что в середине прямоугольников оказываются отсчеты ДПФ (k/ΔtL, k = 0... L-l). Затененные прямоугольники соответствуют номерам k, которые учитываются в сумме.
Показатели качества вычисления корреляционной суммы по формуле (2) будут следующими. Если в выражение для корреляционной суммы (4) подставить выборку чистого сигнала (без шума) с параметрами (fc, f'c), то, рассматривая зависимость модуля суммы от параметров, получим функцию рассогласования ЛЧМ-сигнала ρ (fc, f'c). При больших значениях N нормированную функцию рассогласования можно представить в виде
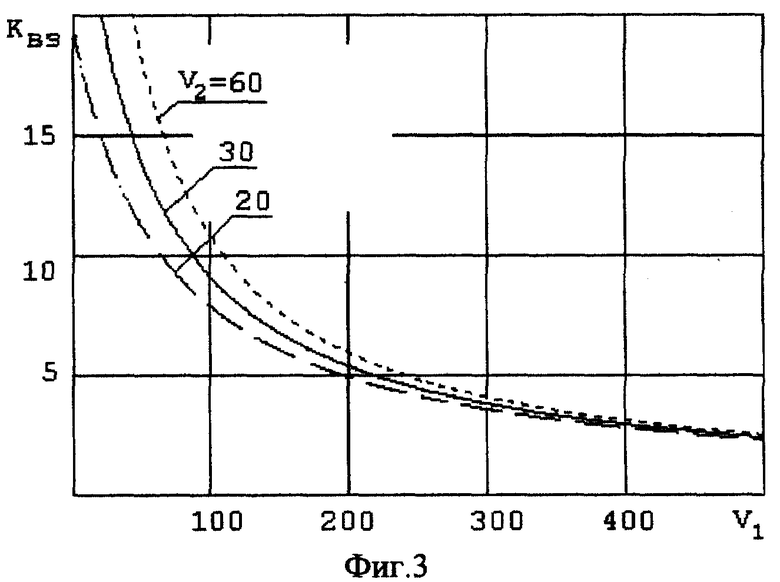
Из выражения (11) следует, что функция ρ (fc, f'c) зависит от разности векторов,  Ha фиг. 2 представлены линии уровня функции рассогласования в одном квадранте (поскольку в остальных квадрантах картина симметрична). Откуда следует, что в точке (0,0) расположен глобальный максимум, а в точках (±0.91/T, ±5.2/T2) - максимальные боковые лепестки, уровень которых равен 0.53.
Ha фиг. 2 представлены линии уровня функции рассогласования в одном квадранте (поскольку в остальных квадрантах картина симметрична). Откуда следует, что в точке (0,0) расположен глобальный максимум, а в точках (±0.91/T, ±5.2/T2) - максимальные боковые лепестки, уровень которых равен 0.53.
В случае, когда функция рассогласования вычисляется на основе соотношения (2), интерес представляет степень искажения формы этой функции. Поэтому, показателем качества вычисления корреляционной суммы может являться уровень максимального бокового лепестка Lбл. Другим показателем являются потери в отношении сигнал/шум (С/Ш), характеризующие степень когерентности суммирования. По определению отношение С/Ш q равно
где числитель вычисляется при отсутствии в выборке шума, а знаменатель - при отсутствии в выборке сигнала;
σ(.) - среднее квадратическое отклонение (СКО), усредненное по реализациям шума.
Обозначим через q' величину отношения С/Ш, вычисленную по формуле (12), где Z(fc, f'c) определяется по выражению (2). Тогда потери Δq в отношении С/Ш равны
Δq = 20 log10(q/q′), дБ. (13)
В выражении для величины q' знаменатель вычисляется по формуле
Расчеты показателей проводились для следующего набора параметров N = 1024 и S = 8, 16; N = 768 и S = 12. Установлено, что величина Lбл не превышает 0.6, а потери в отношении С/Ш Δq - 1 дБ. Причем с ростом числа сегментов S характеристики улучшаются.
При обнаружении сигналов максимум модуля корреляционной суммы (выражение (4)) определяют в узлах сетки, покрывающей область параметров [fa, fb] • [f'a, f'b] . Экономичное размещение узлов сетки на плоскости (f, f') следующее. Линии уровня тела неопределенности (функции рассогласования) на уровнях 0.6...1 являются симметричными овалами с осями симметрии, направленными вдоль координат f и f' (см. фиг. 2). Надлежащим масштабированием осей можно добиться равенства их длин так, что овалы будут по форме близки к окружностям. Следовательно, экономичными будут являться сетки гексагонального типа. Присвоим узлу номер, состоящий из двух индексов (ij), i = 0...N1 - 1, j = 0...N2 - 1. Параметры с номером (i, j) определяются по выражениям
fij = fa + d(i+0.5), i = 0...N1 - 1, j = 0,2,4,...,
fij = fa+ di, i = 0...N1 - 1, j = 1,3,5,...,
f'ij = f'a + d'(j + 0.5), i = 0..N1- 1, j = 0...N2 - 1.
N1 = (fb - fa)/d + 0.5, N2 = (f'b - f'a)/d'. (15)
Величины d и d' определяются из условия пересечения тел неопределенности, размещенных в трех соседних узлах с номерами (i, j), (i+1, j) (i, j + 1) по уровню 0.63. Расчеты показали, что d = 0.8/T, d' = 6/T2.
Размеры области параметров, которая приходится на один узел, равны d • d'. Это позволяет оценить количество узлов Nn, покрывающих всю область [fa, fb] • [f'a, f'b],
Nn = V1V2/4.8, V1 = (fb - fa)T, V2 = (f'b - f'b)T2. (16)
Рассмотрим узлы с номерами (i, j) и (i + 5k, j), где k = 1,2,3,.... Частоты, соответствующие этим узлам, согласно выражению (15) отличаются на величину 4k/T. Поскольку количество сегментов S выбрано кратным четырем, S = 8, 12, 16, ... , то при k = S/4 частоты будут отличаться на величину S/T, равную 1/ΔtL - частотному дискрету ДПФ сегмента. Можно показать, что номера отсчетов ks и k's, соответствующие этим узлам, при одинаковых s отличаются на единицу, а коэффициенты gs и g's отличаются на постоянный фазовый множитель, который можно опустить. Такая закономерность вытекает непосредственно из фиг. 1, где переходу из узла (i, j) в узел (i + 5S/4, j) соответствует сдвиг графика мгновенной частоты сигнала вверх на величину частотного дискрета.
Таким образом, если заранее вычислены и сохранены значения номеров отсчетов ks, k's и коэффициентов gs, g's для узлов с номерами i=0...5S/4-1, j=0...N2-1, то эти величины для остальных узлов вычислять не требуется.
Сравнительная оценка вычислительных затрат предлагаемого способа и способа прототипа. Затраты вычислительных ресурсов измеряются в элементарных операциях (ЭО) типа умножения или сложения над действительными числами.
Так, для получения одного значения корреляционной суммы (без учета предварительных вычислений ДПФ сегментов), если заранее вычислены и сохранены значения номеров отсчетов ks, k's и коэффициентов gs, g's для узлов с номерами i=0...5S/4-1, j=0...N1-1, требуется 16S ЭО.
На вычисление БПФ выборки размера N требуется 2Nlog2(N) действительных сложений и 3Nlog2(N) умножений [5]. В сумме это составляет 5Nlog2(N) ЭО. Следовательно, если выборка размера N разделена на S одинаковых сегментов, то вычисление БПФ сегментов требует 5Nlog2(N/S) ЭО.
Суммарные вычислительные затраты Соб1, необходимые для обнаружения сигнала в области [fa, fb] • [f'a, f'b], будут определяться затратами на вычисление ДПФ сегментов и корреляционных сумм, т.е.
Соб1 = 5Nlog2(N/S) + 3.3SV1V2. (17)
Определим вычислительные затраты способа прототипа, при котором корреляционные суммы вычисляют в узлах прямоугольной сетки с периодами 1/T и 2/T2 по частоте и производной частоты соответственно. Количество узлов Nn, накрывающих область параметров [fa, fb] • [f'a, f'b] для этого способа равно
Nn = V1V2/2, (18)
что в 2.4 раза больше величины, соответствующей предлагаемому способу (см. выражения (16)). Обозначим слоем сетки узлов их совокупность с одинаковым значением f'. БПФ позволяет вычислять сразу все значения в слое узлов. Кроме собственно БПФ необходимо производить умножения значений выборки сигнала на комплексные экспоненты (фазовые множители). Таким образом
Соб2 = V2N(5log2(N)+18)/2. (19)
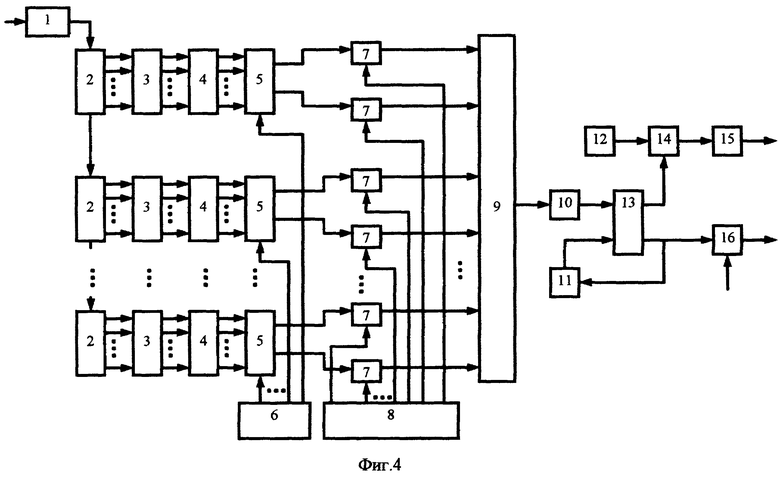
Коэффициент выигрыша по вычислительным затратам Квз, равный отношению соответствующих величин Соб1 и Соб2, будет определяться следующим образом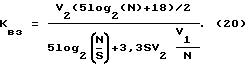
На фиг. 3 представлены зависимости Квз от величин V1 и V2 при N = 1024, S = 8. Например, при V1 = 200, V2 = 30 величина Квз равна 5.4.
Техническая реализация способа возможна на основе устройства, представленного на фиг. 4. Устройство состоит из блока АЦП 1, S блоков регистров сдвига 2, S блоков БПФ 3, S блоков регистров 4, S коммутаторов 5, постоянных запоминающих устройств (ПЗУ) 6 и 8, 2S умножителей комплексных чисел 7, сумматора комплексных чисел 9, вычислителя модуля комплексного числа 10, регистра 11, счетчика 12, вычислителя максимума из двух чисел 13, ключа 14, регистра 15, порогового устройства 16.
Устройство работает следующим образом. На вход блока АЦП 1 поступает аналоговый сигнал. Цифровые отсчеты сигнала последовательно накапливаются в S блоках регистров сдвига 2, соответствующих S сегментам выборки. После накопления выборки отсчеты сигнала поступают на входы S блоков БПФ 3, которые параллельно вычисляют комплексные отсчеты ДПФ сегментов и засылают их в S блоков регистров. Далее производится Nn циклов вычисления модулей корреляционной суммы по количеству узлов сетки, покрывающей область значений параметров. В каждом таком цикле коммутаторы 5 подключаются к тем регистрам 4, которые содержат отсчеты ДПФ сегментов, используемые при вычислении значения корреляционной суммы текущего узла. Номера этих регистров хранятся в ПЗУ 6. С выходов коммутаторов 5 отсчеты ДПФ сегментов поступают на первые входы умножителей 7, на вторые входы которых из ПЗУ 8 поступают комплексные коэффициенты. Отсчеты ДПФ сегментов, умноженные на комплексные коэффициенты, суммируются в блоке 9, на выходе которого формируется комплексное значение корреляционной суммы текущего узла. В блоке 10 вычисляется модуль этой величины. В регистре 11 содержится значение текущего максимума модуля корреляционной суммы (по пройденным узлам), в первом цикле в регистре 11 содержится нулевое значение. В счетчике 12 содержится номер текущего цикла. На первый вход вычислителя максимума из двух чисел 13 поступает значение модуля корреляционной суммы текущего узла, на второй вход - значение текущего максимума модуля корреляционной суммы (по пройденным узлам). На первом выходе вычислителя 13 формируется единица, если значение на первом его входе превышает значение на втором входе, в противном случае формируется ноль. На втором выходе вычислителя 13 формируется значение текущего максимума модуля корреляционной суммы. С первого выхода вычислителя 13 код поступает на управляющий вход ключа 14. На первый вход ключа 14 подается номер цикла. Таким образом, в регистр 15 записывается номер узла, которому соответствует текущее максимальное значение модуля корреляционной суммы. После завершения всех Nn циклов на втором выходе устройства 13 присутствует максимум модуля корреляционной суммы по всем узлам, значение которого поступает на первый вход порогового устройства 16. На второй вход порогового устройства 16 поступает значение порога. На выходе порогового устройства 16 формируется единичное значение в случае обнаружения сигнала и нулевое значение - в противном случае. В случае обнаружения сигнала в регистре 15 содержится номер узла, соответствующего сигналу.
Таким образом, предлагаемый способ обнаружения ЛЧМ-сигнала с неизвестными параметрами позволяет снизить вычислительные ресурсы при его реализации.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Обработка сигналов в многоканальных РЛС./Под. ред. А.П. Лукошкина. М. : Радио и связь, 1983, стр. 307, рис. 12.18.
2. Кузьменков В.Ю., Логинов В.М. Способы и устройства совместного измерения радиальной скорости и радиального ускорения.// Радиотехника и электроника, 1997, Т.42, N 12, С. 1465...1475.
3. Многофункциональные радиоэлектронные комплексы истребителей./ Под. ред. Г.С.Кондратенкова. - М.: Военное издательство, 1994.
4. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981.
5. Блейхут Р. Быстрые алгоритмы цифровой обработки сигналов. - М.: Мир, 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ МАНЕВРИРУЮЩЕЙ ЦЕЛИ | 2004 |
|
RU2282873C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА ЦЕЛЕЙ В ГРУППЕ | 2002 |
|
RU2260196C2 |
| ПРИЕМНИК СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1997 |
|
RU2118054C1 |
| Способ позиционирования в сетях связи с использованием технологии программно-конфигурируемого радио | 2023 |
|
RU2817862C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ С ПОВЫШЕННОЙ РАЗРЕШАЮЩЕЙ СПОСОБНОСТЬЮ | 2010 |
|
RU2491569C2 |
| ЦИФРОВОЙ БЛОК ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 1999 |
|
RU2166771C1 |
| СПОСОБ АДАПТИВНОЙ НАСТРОЙКИ КАНАЛОВ УСКОРЕНИЯ В МНОГОКАНАЛЬНОМ ОБНАРУЖИТЕЛЕ МАНЕВРИРУЮЩЕЙ ЦЕЛИ | 2013 |
|
RU2542347C1 |
| СПОСОБ АДАПТИВНОГО ЦИФРОВОГО ОБНАРУЖЕНИЯ СИГНАЛОВ | 2002 |
|
RU2237258C2 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ УЗКОПОЛОСНЫХ ПОМЕХ В СПУТНИКОВОМ НАВИГАЦИОННОМ ПРИЕМНИКЕ | 2012 |
|
RU2513028C2 |
| Коррелятор вибросейсмических данных | 1989 |
|
SU1665326A1 |
Изобретение относится к радиолокации и может быть использовано в радиолокационной технике для обнаружения маневрирующей цели в импульсно-доплеровских радиолокационных станциях. Способ основан на определении максимума модуля корреляционной суммы выборок сигнала, отраженного от цели, и опорного сигнала в пространстве параметров: частота сигнала и ее производная. Достигаемый технический результат - уменьшение вычислительных затрат. Выборки сигналов разбивают на S сегментов одинаковой длины, причем величина S должна быть не менее восьми и кратна четырем, вычисляются отсчеты дискретного преобразования Фурье сегментов, корреляционные суммы вычисляются в узлах сетки гексагонального типа с периодами 0,8/Т и 6/T2 по частоте и производной частоты соответственно, где Т - длительность выборки сигнала. Корреляционные суммы вычисляются путем суммирования отсчетов дискретного преобразования Фурье сегментов, умноженных на комплексные коэффициенты, при этом от каждого сегмента в сумме учитывается один или два отсчета, комплексные коэффициенты в корреляционной сумме для узлов сетки, соответствующих первым 5S/4 номерам частотных дискретов, заранее вычисляются и сохраняются в памяти, остальные комплексные коэффициенты вычисляются путем использования соответствующих значений коэффициентов с первыми 5S/4 номерами. 4 ил.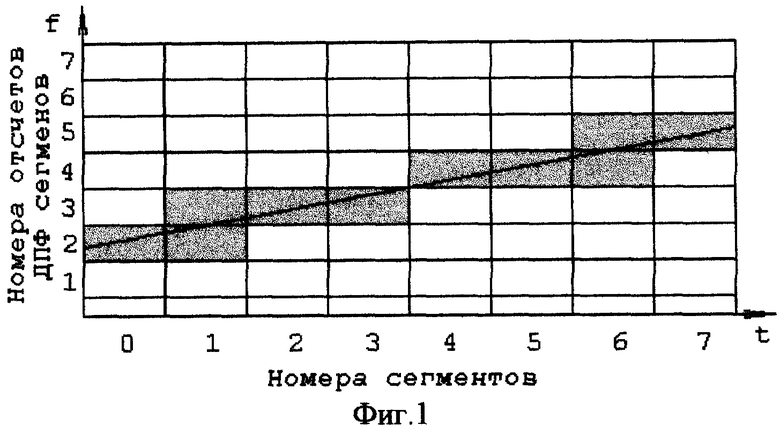
Способ обнаружения линейно-частотно-модулированного сигнала, заключающийся в том, что осуществляют аналого-цифровое преобразование сигнала, вычисляют корреляционные суммы выборки сигнала и опорных комплексных линейно-частотно-модулированных сигналов, фазы действительной и мнимой частей которых сдвинуты на девяносто градусов, в узлах сетки, покрывающей область возможных значений параметров: частоты сигнала и ее производной, определяют максимум модуля корреляционной суммы по узлам сетки, сравнивают значение максимума модуля корреляционной суммы с порогом, отличающийся тем, что при вычислении корреляционных сумм разбивают выборку сигнала на S сегментов одинаковой длины L, причем величина S должна быть не менее восьми, кратна четырем и удовлетворять условию
f'maxT2 < S2,
где f'max - максимальное абсолютное значение производной частоты сигнала;
T - длительность выборки сигнала,
вычисляют отсчеты дискретного преобразования Фурье сегментов на основе алгоритма быстрого преобразования Фурье, вычисляют корреляционные суммы в узлах сетки гексагонального типа (fij, f'ij), i = N1 - 1, j=0 ... N2 - 1, с периодами 0,8/T и 6/T2 по частоте опорного сигнала и производной частоты соответственно, где fij, f'ij - значения частоты и ее производной в узле с индексом (ij), N1 - количество отсчетов частоты, N2 - количество отсчетов производной частоты, по формуле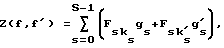
s=0...S-1, K = 0...L-1,

Фs=Ф(ts),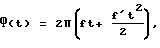
fs= f+f′ts,
где Z (f, f') - значение корреляционной суммы;
f - частота опорного сигнала;
f' - производная частоты опорного сигнала;
Fsk - k-й отсчет дискретного преобразования Фурье s-го сегмента;
gs, g's - комплексные коэффициенты;
ks, k's - номера отсчетов дискретного преобразования Фурье s-го сегмента, которые учитываются в корреляционной сумме;
xn - значения отсчетов выборки сигнала, n = 0 ... N-1;
Ф(t) - зависимость фазы опорного сигнала от времени;
Δt - период дискретизации выборки сигнала,
предварительно вычисляют и сохраняют в памяти номера отсчетов ks, k's и значения комплексных коэффициентов gs, g's - для узлов с индексами i = 0 ... 5S/4-1, j= 0. . .N2-1, остальные номера отсчетов и комплексные коэффициенты вычисляют по формулам


где после вертикальной черты указаны индексы узлов.
| КУЗЬМЕНКОВ В.Ю | |||
| и др | |||
| Способы и устройства совместного изменения радиальной скорости и радиального ускорения | |||
| - Радиотехника и электроника, 1997, т | |||
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Подвижной пневматический домкрат | 1924 |
|
SU1465A1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА | 1996 |
|
RU2112992C1 |
| RU 2052836 С1, 20.01.1996 | |||
| ЦИФРОВОЙ СПОСОБ ОПТИМАЛЬНОГО ПРИЕМА ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫХ ИМПУЛЬСОВ | 1992 |
|
RU2042956C1 |
| US 4622552, 11.11.1986 | |||
| Устройство для упрочняющей динамической обработки деталей | 1973 |
|
SU692720A2 |
