Область техники, к которой относится изобретение
Данное изобретение относится к способу управления операцией бурения или резания, выполняемой кабельным инструментом в скважине. Кроме того, данное изобретение относится к кабельному инструменту для выполнения операции бурения или резания в скважине и осуществления способа согласно данному изобретению.
Уровень техники
При выполнении операций бурения или резания в скважине желательно иметь возможность слежения за процессом бурения или резания и управления им. Однако, на практике этого трудно достичь по нескольким причинам. Во-первых, сложно получать информацию о точном местоположении бурового долота или режущего лезвия в скважине и, таким образом, точно определять, в какой части обсадной колонны производится резание или бурение. Во-вторых, за процессом бурения или резания нельзя следить визуально, и поэтому трудно определить, работает ли механизированное оборудование должным образом, на основании известных технологий. Кроме того, технические характеристики, состав или состояние компонента, подлежащего бурению в скважине, могут быть не всегда известны либо могут оказаться отличными от ожидаемых, и поэтому бурение может оказаться не таким простым, как ожидалось. Поэтому предпочтительно иметь возможность определения правильности выбора нагрузки на долото и скорости вращения бурового долота и/или слежения за соответствием процесса бурения или резания плану и возникновением непредвиденных условий.
Раскрытие изобретения
Задача данного изобретения заключается в полном или частичном устранении вышеупомянутых недостатков уровня техники. Более конкретно, задача изобретения состоит в обеспечении улучшенного способа управления операциями бурения или резания в скважине, в котором осуществляется слежение за процессом бурения или резания.
Вышеупомянутые задачи, а также многочисленные другие задачи, преимущества и признаки, очевидные из приведенного ниже описания, выполнены благодаря решению согласно данному изобретению посредством способа управления операцией бурения или резания, выполняемой посредством кабельного инструмента в скважине, содержащего следующие этапы:
- запуск операции бурения или резания в скважинном объекте, например, в обсадной колонне или клапане,
- детектирование вибраций в корпусе инструмента, создаваемых в ходе операции бурения или резания в скважинном объекте, с использованием датчика вибрации, представляющего собой акселерометр и расположенного на корпусе инструмента,
- обработка сигнала вибрации от датчика вибрации для получения эталонного частотного спектра в первой части операции бурения или резания,
- обработка сигнала вибрации от датчика вибрации для получения частотного спектра в реальном времени,
- сравнение частотного спектра с эталонным частотным спектром,
- вычисление и детектирование завершения или сбоя операции, например, завершения после разрезания обсадной колонны на две секции обсадной колонны, или сбоя при застревании долота, выполняемые на основании сравнения частотного спектра в реальном времени с эталонным частотного спектром, и
- управление операцией для прекращения операции при детектировании завершения или сбоя операции.
Путем получения эталонного частотного спектра в ходе первой части операции бурения или резания, эталон получают без измерения большого количества различных обсадных колонн и частей обсадных колонн с целью создания базы данных всех мыслимых типов обсадных колонн и частей обсадных колонн. Обсадные колонны отличаются не только размерами и материалами, но также и наличием различных компонентов, собранных для создания колонны обсадных труб. Компоненты отличаются по функциям и размерам, а число компонентов и секций обсадной колонны различно для разных скважин. Таким образом, создание эталонной базы данных отнимает очень много времени, при этом, однако, нет никакой гарантии, что она содержит полезный эталон. Поэтому, эталон можно очень легко получать во время первой части операции бурения или резания после окончания фазы пуска, при этом даже нет необходимости останавливать уже запущенную операцию. Кроме того, полученный таким образом эталон очень точен, поскольку получен в той части обсадной колонны, размер и материал которой не изменяются. Если размер или материал обсадной колонны изменяется, изменяется также частота собственных колебаний, что означает соответствующее изменение детектируемых вибраций.
В одном варианте осуществления изобретения этап вычисления и детектирования завершения операции может содержать этап вычисления центра плотности колебаний области пиков в частотном спектре, причем область превышает заданное значение, и сравнения данного центра плотности с центром плотности области пиков в эталонном частотном спектре, при этом упомянутая область превышает то же заданное значение, для определения расхождения между двумя центрами плотности, причем этап управления операцией может быть основан на сравнении центра плотности.
Кроме того, заданное значение может представлять собой амплитуду со значением больше 40, предпочтительно больше 50, более предпочтительно больше 60.
В другом варианте осуществления изобретения этап обработки сигнала вибрации от датчика вибрации для получения эталонного частотного спектра может быть выполнен в первой части операции бурения или резания после окончания фазы пуска.
Путем определения расхождения между эталонным частотным спектром и частотным спектром в реальном времени выполняется непрерывное слежение за операцией бурения или резания, благодаря чему имеется возможность непрерывного управления процессом бурения или резания или его регулирования.
Описанный выше способ может дополнительно содержать этап определения расхождения между эталонным частотным спектром и частотным спектром в реальном времени, выполняемый перед этапом управления.
Также, упомянутый способ может содержать этап прекращения операции бурения или резания в скважинном объекте, если расхождение превышает заданное пороговое значение.
Таким образом, процесс бурения или резания может быть остановлен автоматически во избежание поломки инструмента и чрезмерного износа инструментов.
Более того, способ согласно данному изобретению может дополнительно содержать этап определения, что происходит бурение или резание скважинного объекта, когда расхождение между эталонным частотным спектром и частотным спектром в реальном времени больше или меньше заданного порогового значения.
Таким образом, может быть определено точное местоположение бурового долота или режущего лезвия относительно объекта, бурение которого выполняется.
Когда операция резания заканчивается и обсадная колонна почти прорезана, оператор может захотеть понизить скорость резания, поэтому получение сигнала о том, что расхождение больше или меньше заданного порогового значения, дает возможность оператору определять конец операции и, таким образом, регулировать скорость вращения бурового долота и нагрузку на долото.
Кроме того, описанный выше способ может содержать этап передачи вверх по стволу скважины сигнала о том, что операция была выполнена в соответствии с планом.
Дополнительно, упомянутый способ может содержать этап управления скоростью вращения долота и нагрузкой на долото, выполняемый на основании расхождения между эталонным частотным спектром и частотным спектром в реальном времени.
Таким образом, можно оптимизировать операцию бурения или резания и избежать чрезмерного износа бурового долота или режущего лезвия.
Более того, способ согласно данному изобретению может дополнительно содержать этап детектирования изменения в расхождении между эталонным частотным спектром и частотным спектром в реальном времени, указывающего на то, что стенка обсадной колонны полностью пробурена или прорезана.
Таким образом, можно определять завершение процесса бурения или резания.
Кроме того, расхождение между эталонным частотным спектром и частотным спектром в реальном времени может быть определено путем оценки того, является ли сигнал вибрации в одном или большем количестве эталонных диапазонах частот сильнее либо слабее заданного порогового уровня.
Дополнительно, расхождение между эталонным частотным спектром и частотным спектром в реальном времени может быть определено путем оценки того, является ли по меньшей мере один сигнал вибрации в высокочастотном диапазоне и по меньшей мере один сигнал вибрации в низкочастотном диапазоне одновременно сильнее либо слабее соответствующих заданных пороговых уровней.
В одном варианте осуществления изобретения низкочастотный диапазон может находиться в первом диапазоне частот от 500 Гц до 5 кГц.
В другом варианте осуществления изобретения высокочастотный диапазон может находиться во втором диапазоне частот от 5 кГц до 50 кГц.
Более того, расхождение между эталонным частотным спектром и частотным спектром в реальном времени может быть определено путем использования численного процесса.
Данное изобретение также относится к кабельному инструменту для выполнения операции бурения или резания в скважине и осуществления вышеописанного способа, содержащему:
- корпус инструмента, имеющий внутреннюю поверхность,
- буровое долото или режущее долото,
- средство для продвижения бурового долота или режущего долота,
- вращающее средство для вращения бурового долота или режущего долота, и
- один или более датчиков вибрации, выполненных с возможностью передачи детектируемых вибраций, возникающих в ходе работы кабельного бурового или режущего инструмента,
причем один или более датчиков вибрации представляет(ют) собой акселерометр(ы), расположенный(ые) для вхождения в контакт с внутренней поверхностью корпуса инструмента и выполнен(ы) с возможностью детектирования вибраций в корпусе инструмента, который передает вибрации, возникающие в ходе работы кабельного бурового или режущего инструмента, к одному или большему количеству датчиков,
при этом кабельный инструмент дополнительно содержит модуль обработки, предназначенный для обработки сигнала вибрации от датчика вибрации с тем, чтобы получать частотный спектр в реальном времени, и для сравнения частотного спектра с эталонным частотным спектром.
В одном варианте осуществления изобретения один или более датчиков вибрации могут быть расположены на конце инструмента, наиболее удаленном от бурового долота или режущего долота.
Наличие акселерометра дает возможность расположения датчиков вибрации на наибольшем удалении от долота и, соответственно, наиболее близко к кабелю или к волоконному кабелю, передающему данные на поверхность.
В другом варианте осуществления изобретения датчики вибрации могут быть расположены вдоль окружности внутренней поверхности.
В еще одном варианте осуществления изобретения процессор может содержать фильтр передаваемого сигнала в частотном диапазоне от 1 до 200 кГц.
Кроме того, инструмент может содержать массив датчиков вибрации, расположенных вдоль внутренней поверхности.
Упомянутое средство для продвижения бурового долота или режущего долота может представлять собой скважинный трактор.
Инструмент может дополнительно содержать центратор для центрирования инструмента в обсадной колонне.
Более того, инструмент может дополнительно содержать анкерную секцию для анкерного крепления инструмента в обсадной колонне.
Кроме того, датчик вибрации может быть выполнен с возможностью детектирования вибраций, генерируемых в буровом долоте в ходе буровых операций.
В одном варианте осуществления изобретения для детектирования вибраций в различных частотных диапазонах может быть использовано множество, предпочтительно два, более предпочтительно три датчика вибрации.
Посредством кабельного инструмента можно детектировать чрезмерный износ бурового долота на основании уровней по меньшей мере одного сигнала вибрации в высокочастотном диапазоне и по меньшей мере одного сигнала вибрации в низкочастотном диапазоне.
Кроме того, задачей операции бурения или резания может быть пробуривание или прорезание обсадной колонны, выбуривание дефектного клапана или бурение через препятствие на пути протекания текучей среды.
Краткое описание чертежей
Изобретение и его многочисленные преимущества описаны ниже более подробно со ссылками на прилагаемые схематические чертежи, на которых с целью иллюстрации показаны некоторые не ограничивающие варианты осуществления изобретения, и на которых:
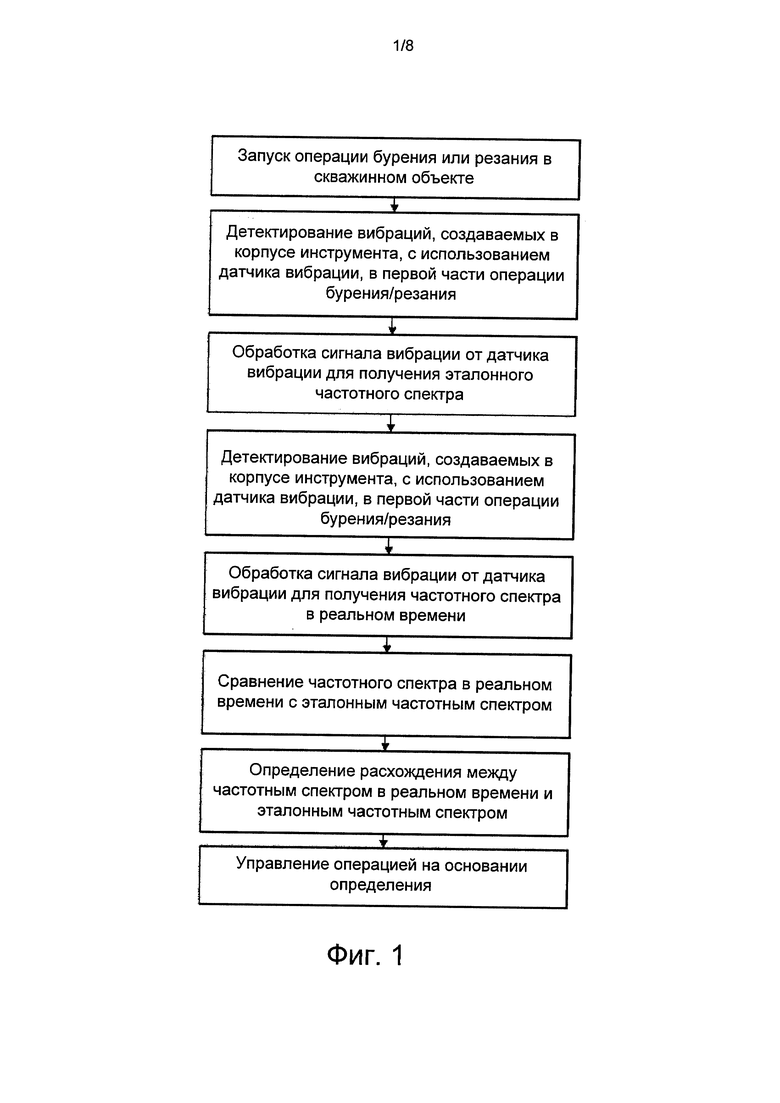
на фиг. 1 показана блок-схема способа управления операцией бурения или резания,
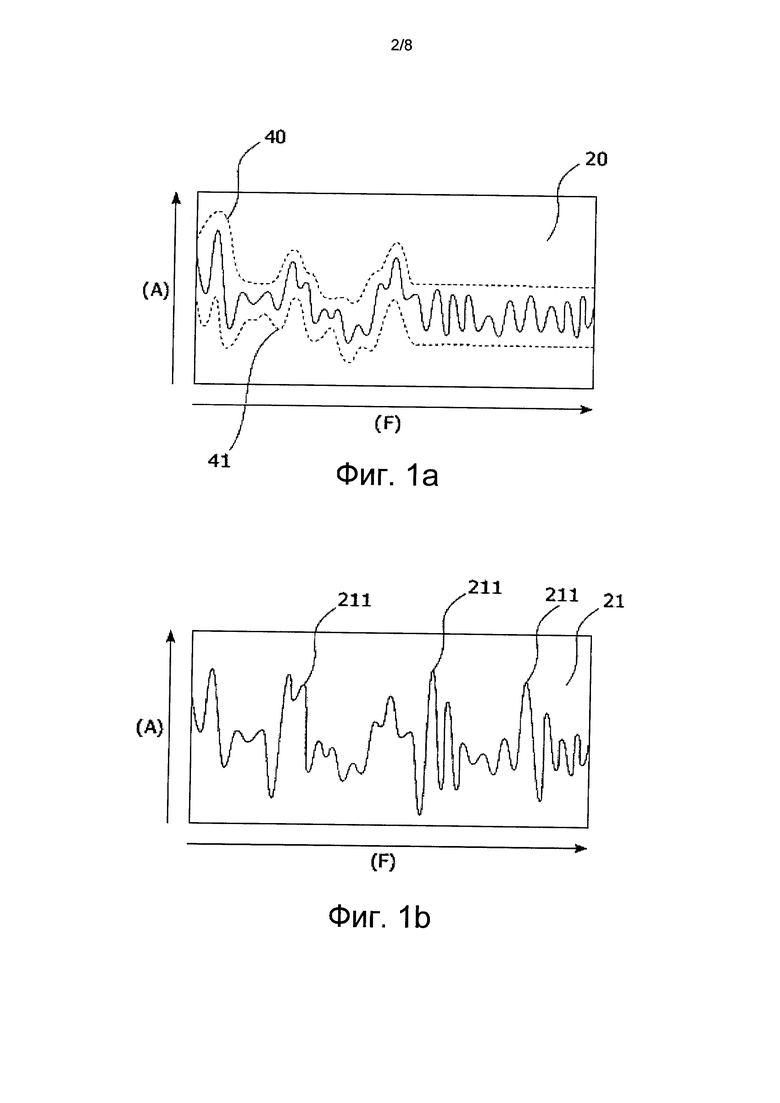
на фиг. 1а показан схематический график эталонного частотного спектра,
на фиг. 1b показансхематический график частотного спектра в реальном времени,
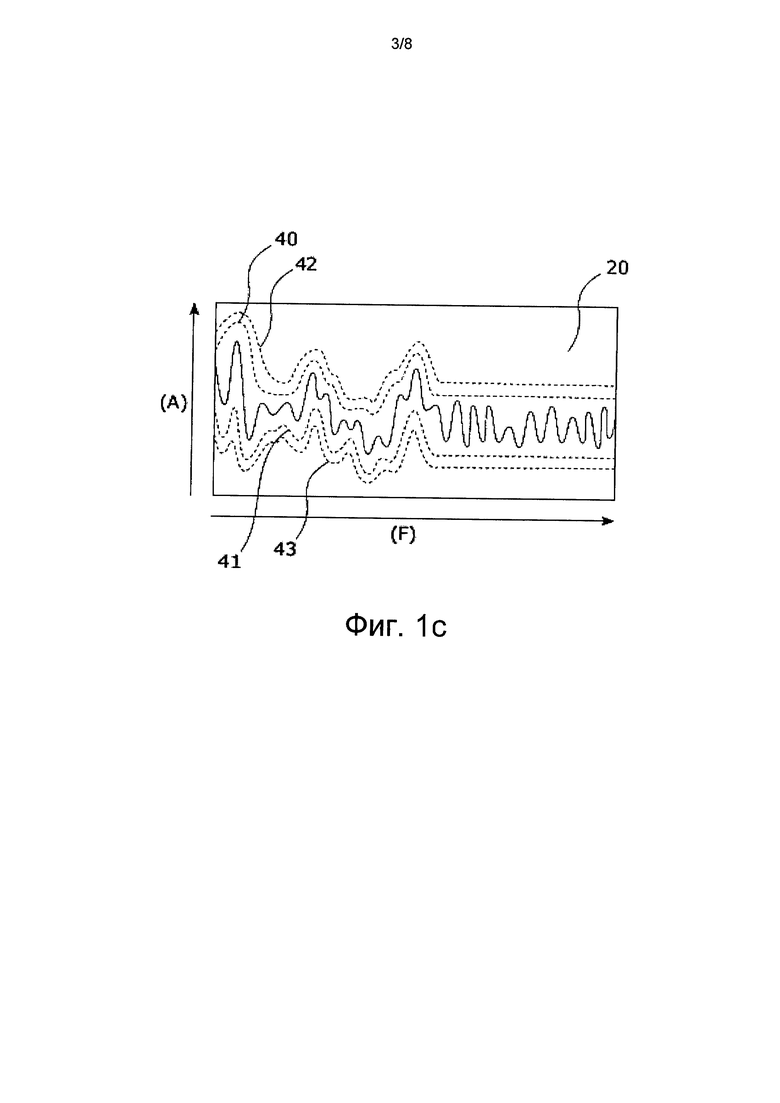
на фиг. 1с показан схематический график другого эталонного частотного спектра,
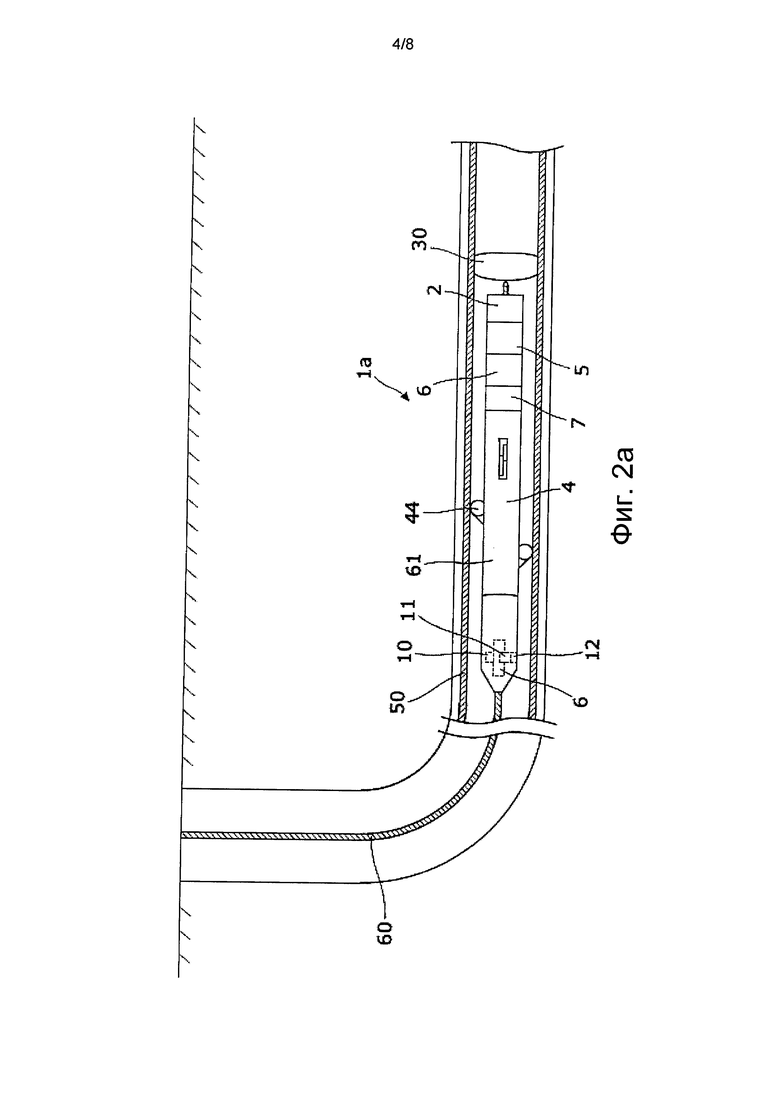
на фиг. 2а показан кабельный буровой инструмент для выполнения операций бурения в скважине,
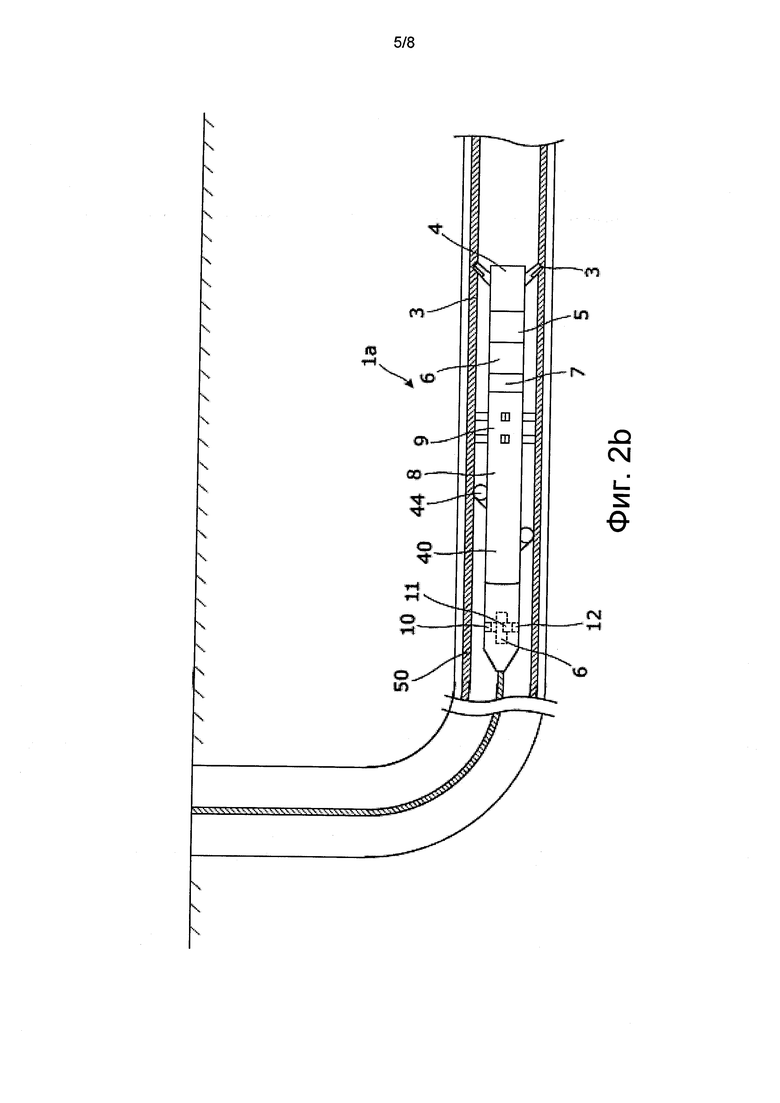
на фиг. 2b показан кабельный режущий инструмент для выполнения операций резания в скважине,
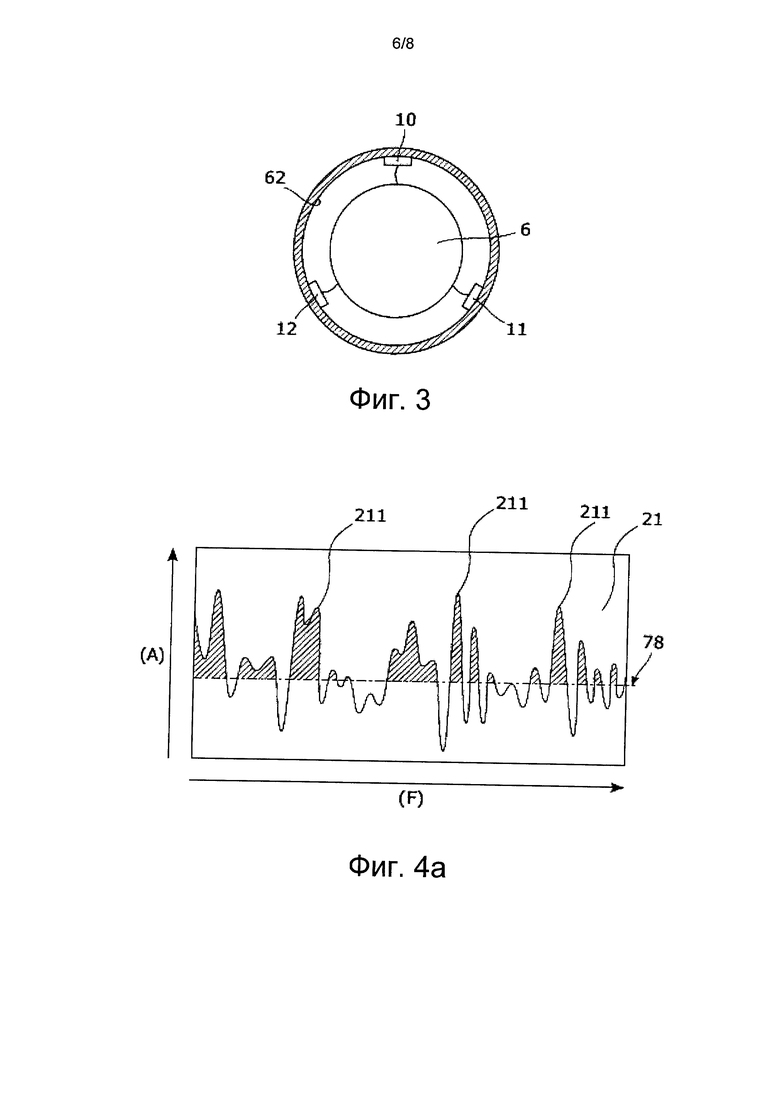
на фиг. 3 в поперечном сечении показан вид инструмента, на котором показано расположение датчиков вибрации,
на фиг. 4а показан схематический график частотного спектра для вычисления плотности колебаний,
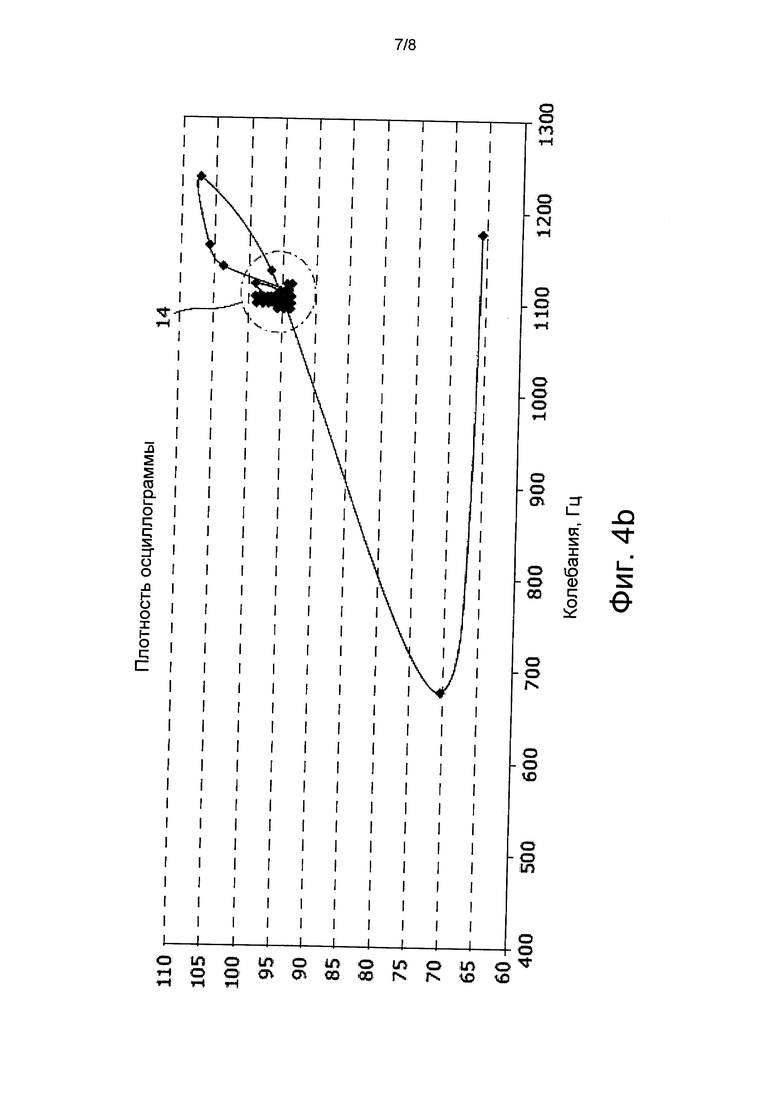
на фиг. 4b показан график плотности колебаний в ходе операции резания, и
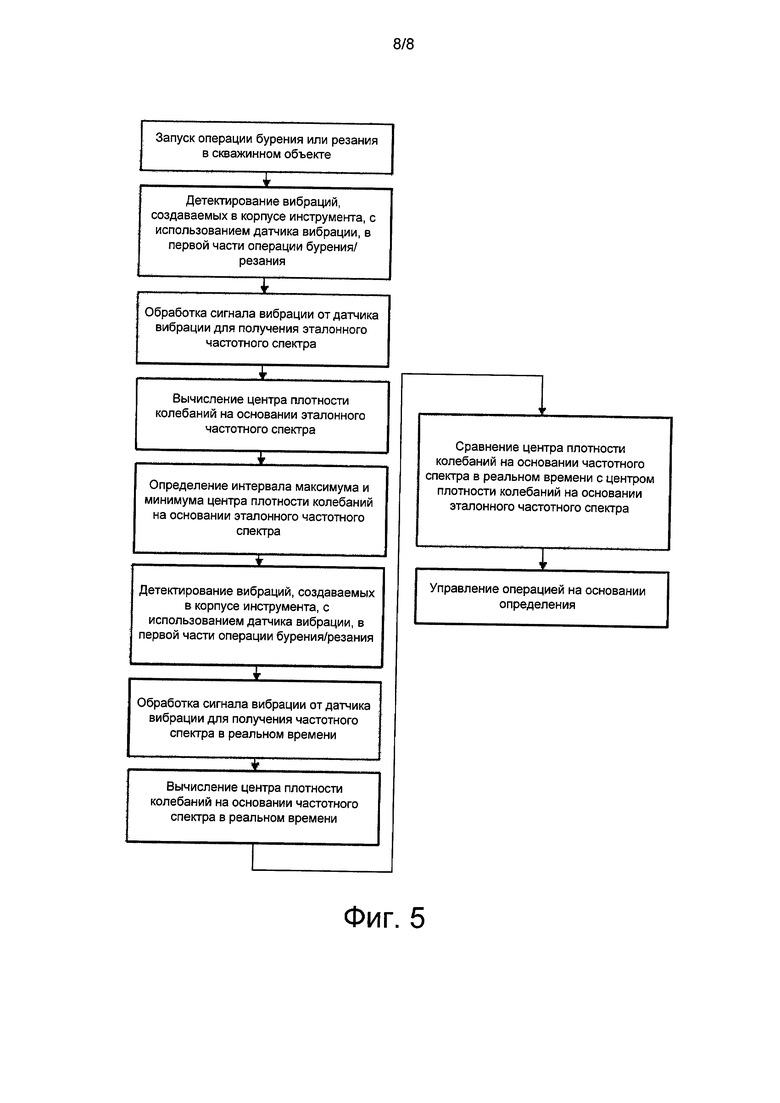
на фиг. 5 показана блок-схема способа согласно другому варианту осуществления способа управления операцией бурения или резания.
Все чертежи являются очень схематичными и не обязательно выполнены в масштабе, при этом на них показаны только те части, которые необходимы для пояснения изобретения, другие части не показаны или показаны без объяснения.
Осуществление изобретения
На фиг. 1 показана блок-схема способа управления операцией бурения или резания в скважине. Такой способ может быть выполнен в скважине посредством кабельного бурового инструмента для перфорирования обсадной колонны 50 скважины или для выбуривания засоренного клапана 30, как показано на фиг. 2а. Кроме того, способ может быть выполнен в скважине посредством кабельного режущего инструмента для разрезания обсадной колонны 50 скважины или для другого резания обсадной колонны 50, как показано на фиг. 2b. В дальнейшем кабельный буровой инструмент и кабельный режущий инструмент обобщенно описаны как кабельный инструмент.
После того как спускаемый инструмент был спущен в скважину и расположен соответствующим образом, запускают процесс бурения или резания, представляющий собой первый этап, показанный на блок-схеме. Когда вращающееся буровое долото или режущее лезвие взаимодействует с объектом, предназначенным для пробуривания, например, с обсадной колонной 50, как показано на фиг. 3b, или с клапаном 30, как показано на фиг. 3а, как в объекте, так и в самом кабельном инструменте возникают вибрации.
Вибрации, генерируемые при бурении или резании, детектируются датчиком 10, 11, 12 вибрации, представляющим собой акселерометр и расположенным таким образом, что он входит в контакт с внутренней поверхностью корпуса кабельного инструмента, причем вибрации, соответственно, передаются в виде сигнала вибрации к модулю 6 обработки, как показано на фиг. 2а и 2b. Модуль обработки может быть расположен в кабельном инструменте или снаружи скважины, например, у устья скважины. Во время первой части операции бурения или резания вибрации, генерируемые после окончания фазы пуска, детектируются датчиком вибрации, и посредством модуля обработки создается эталонный частотный спектр. Затем модуль обработки обрабатывает сигналы вибрации для регистрирования частотного спектра 21 в реальном времени имеющихся вибраций, как показано на фиг. 1b.
Затем обработанный частотный спектр сравнивается с эталонным частотным спектром 20, как показано на фиг. 1а, после чего эталонный частотный спектр связывается с интервалами максимальных и минимальных допустимых значений частоты в любой момент времени в ходе операции. Данные интервалы показаны на фиг. 1а пунктирными линиями в виде максимума 40 и минимума 41. Путем сравнения детектируемого и обрабатываемого частотного спектра с эталонным частотным спектром можно управлять операцией на любой стадии, если детектируемые вибрации выходят за пределы ожидаемого интервала.
При бурении или резании объекта или обсадной колонны в скважине буровое долото или доступная мощность могут не соответствовать выполняемой операции, и по этой причине операция должна быть остановлена прежде, чем застрянет буровое долото или будет чрезмерно повреждена обсадная колонна. Если операция не может быть выполнена, этот факт может быть детектирован путем непрерывного детектирования частотного спектра в реальном времени и сравнения его с эталонным частотным спектром.
После обработки частотного спектра в реальном времени на основании детектируемых вибраций может быть определено расхождение между эталонным частотным спектром и частотным спектром в реальном времени, и на основании данного расхождения можно управлять операцией бурения или резания. Если расхождение имеет приемлемое значение, то есть если частотный спектр в реальном времени находится в пределах допустимых интервалов эталонного частотного спектра, операция продолжается без каких-либо изменений. Если расхождение слишком велико, то есть если частотный спектр в реальном времени выходит за пределы допустимых интервалов эталонного частотного спектра, операцию либо останавливают, либо изменяют параметры операции.
Детектирование вибраций может выполняться непрерывно либо с заданными интервалами. Кроме того, если расхождение увеличивается либо были изменены параметры операции, детектирование вибраций может выполняться чаще или непрерывно. Если параметры операции были изменены, обрабатывается новый эталонный частотный спектр, поскольку соответственно изменились и вибрации.
Если операция была выполнена в пределах интервалов эталонного частотного спектра, инструмент отправляет сигнал на поверхность, например, к компьютеру, что операция выполняется в соответствии с эталонным частотным спектром. Такие сигналы отправляются с заданными интервалами, чтобы указывать оператору и/или клиенту, заказавшему операцию, что операция выполняется согласно плану. При выполнении скважинных операций очень важно соблюдение мер безопасности для предотвращения случаев выбросов или других критических ситуаций. В частности, операции, в результате которых создают отверстия или перфорации в обсадной колонне или в объектах, например, в клапане, находятся под регламентированным контролем в связи с потенциальной опасностью данных операций. После нашумевшего происшествия, связанного с масштабной утечкой нефти в Мексиканском заливе в 2010 году, существует возрастающая потребность в системах, выполненных с возможностью отправки на поверхность сигналов, даже если операция выполняется согласно плану, чтобы избавить клиента или оператора от беспокойства.
В модуле обработки сигналы вибрации могут быть отправлены через усилительный каскад, в котором происходит усиление сигналов вибрации. Кроме того, сигналы вибрации могут быть преобразованы из аналоговой формы в цифровую посредством аналого-цифрового преобразователя (ADC). После усилительного каскада сигналы вибрации могут быть пропущены через один или более частотных фильтров. Точность частотного анализа зависит от ширины полосы пропускания данных фильтров, и, таким образом, чем уже ширина полосы пропускания, тем выше достигаемая точность анализа.
Во время процесса бурения или резания детектирование частотного спектра 21 в реальном времени осуществляется непрерывно или квазинепрерывно, либо в заданные моменты времени по ходу процесса. Детектирование частотного спектра 21 в реальном времени осуществляется в заданном диапазоне частот, зависящем от конкретных характеристик процесса бурения или резания. Частотный диапазон частотного спектра может находиться в пределах от 100 Гц до 200 кГц. Однако, поскольку буровые операции часто выполняют с использованием относительно низких скоростей вращения бурового долота, в большинстве случаев достаточен частотный диапазон от 100 Гц до 50 кГц. Частотный диапазон может зависеть также от материала объекта, предназначенного для бурения или резания.
Детектирование частотного спектра осуществляется в координатах частоты (F) и амплитуды (А), либо как функция времени (Т).
На фиг. 1b частотный спектр 21 в реальном времени показан в виде графика зависимости амплитуды (А) вибраций от частоты (F). Тем не менее, частотный спектр может быть представлен многими другими способами, известными специалисту в области техники. Нет необходимости в черчении или визуальном воспроизведении графика для сравнения обработанных детектируемых сигналов вибрации. Каждое измерение, детектируемое датчиком, может быть обработано и сопоставлено с эталонным частотным спектром на предмет его нахождения в пределах установленных допустимых интервалов или вне их. Например, для оценки направления бурения или резания посредством модуля обработки для конкретной частотной полосы может быть построена зависимость амплитуды от времени. Таким образом, возможно осуществлять слежение в пределах конкретного диапазона частот с течением времени. Частотный спектр может быть изображен также в трехмерной системе координат частота-время-амплитуда, в которой частота и интервал времени определяют плоскость, а профиль данной плоскости по высоте в системе координат определяется величиной амплитуды.
Для слежения за процессом бурения или резания оценивают частотный спектр 21 в реальном времени, в результате чего обеспечивается возможность управления процессом бурения или резания в зависимости от конкретных условий. Оценка может производиться непрерывно или квазинепрерывно, либо может осуществляться в заданные моменты времени по ходу процесса, например, когда процесс переходит в новую фазу. Предпочтительно, оценка выполняется в реальном времени.
Частотные спектры в реальном времени оцениваются путем определения расхождения 211 между эталонным частотным спектром 20, показанным на фиг. 1а, и частотным спектром 21 в реальном времени, подлежащем оценке. Предпочтительно, процесс оценки осуществляется автоматически.
Как уже упоминалось, эталонный частотный спектр, также называемый характеристиками частотного спектра, можно также регистрировать в ходе оцениваемого процесса бурения или резания. Например, если задачей процесса резания является отрезание или разрезание обсадной колонны, характеристики частотного спектра можно регистрировать в заданные моменты времени по ходу операции, например, 2-6 раз в ходе операции резания. Затем может быть проведено сравнение зарегистрированных характеристик частотного спектра с частотным спектром в реальном времени для определения факта прорезания обсадной колонны. Кроме того, сравнение характеристик частотного спектра и частотных спектров в реальном времени может быть объединено с измерениями времени для определения факта прорезания обсадной колонны.
Процесс оценки также может быть основан на распознавании шаблонов. Алгоритмы, подходящие для многомерного, в частности, трехмерного, распознавания шаблонов, могут использоваться путем выполнения таких алгоритмов на компьютере, имеющем доступ в реальном времени к детектируемым частотным спектрам или доступ к сохраненным в памяти частотным спектрам.
Кроме того, при оценке частотных спектров в реальном времени внимание может быть сосредоточено на конкретных частотных полосах для детектирования того, является ли сигнал вибрации в пределах одной или большем количестве заданных частотных полос сильнее или слабее определенных заданных пороговых уровней. Расхождение между эталонным частотным спектром 20 и частотным спектром 21 в реальном времени также может быть определено путем оценки того, являются ли по меньшей мере один сигнал вибрации в высокочастотном диапазоне и по меньшей мере один сигнал вибрации в низкочастотном диапазоне одновременно сильнее соответствующих заданных пороговых уровней.
Зарегистрированные частотные спектры в реальном времени могут быть подвержены анализу в компьютере, находящемся либо в инструменте в скважине, либо на поверхности. Затем детектируемые частотные спектры в реальном времени могут быть сохранены в памяти бурового или режущего инструмента или переданы на поверхность перед их сохранением.
Если между частотным спектром 21 в реальном времени и эталонным частотным спектром детектировано определенное расхождение, процесс бурения или резания может быть остановлен, и/или могут быть инициированы управляющие воздействия. Если управляющие воздействия приводят в результате к тому, что частотный спектр 21 в реальном времени изменяется в направлении эталонного частотного спектра 20, процесс бурения или резания может быть продолжен, в противном случае процесс может быть немедленно прекращен.
Как показано на фиг. 1с, в эталонный частотный спектр включены вторые интервалы. Вторые интервалы показаны пунктирной линией 42, проходящей выше пунктирной линии 40 максимумов и указывающей, когда необходимо немедленно остановить операцию, и пунктирной линией 43, которая проходит ниже пунктирной линии 41 минимумов и которая также может указывать, когда необходимо остановить операцию и, например, сменить долото или изменить параметры операции. Управляющие воздействия могут быть активированы, когда обработанный сигнал находится между интервалами максимумов и минимумов при продолжающейся операции. При необходимости, например, по запросу клиента, сигнал об активации управляющего воздействия может быть отправлен на поверхность. Когда управляющее воздействие активировано, к датчикам подается сигнал, указывающий на необходимость выполнения детектирования вибраций чаще, если только детектирование уже не выполняется непрерывно.
Детектирование расхождений может выполняться компьютером в автоматическом режиме, либо человеком-оператором. Человек-оператор может располагаться на буровой установке на поверхности, либо в месте, удаленном от скважины. Если расхождение детектируется компьютером, управляющие воздействия может быть активировано в автоматическом режиме на основании предварительно заданных инструкций. Компьютер также может автоматически останавливать операцию резания или бурения, если расхождение слишком велико.
Детектирование расхождений между частотным спектром 21 в реальном времени и эталонным частотным спектром 20 может использоваться для многих задач. Например, могут быть определены чрезмерный износ бурового долота или истирание бурового долота. Кроме того, детектирование расхождений может использоваться для регулирования скорости вращения бурового долота и нагрузки на долото, или для определения материала, в котором осуществляется бурение. Кроме того, может быть определен износ бурового долота для принятия решения о том, когда необходимо заменить буровое долото для того, чтобы оптимизировать процесс бурения. Изменения в частотном спектре 21 в реальном времени могут указывать на то, что осуществляется бурение скважинного объекта, или что стенка обсадной колонны 50 полностью пробурена или прорезана. Кроме того, благодаря непрерывному детектированию изменений и расхождений, можно избежать серьезных повреждений, например, поломки инструмента, чрезмерного износа инструментов, разрушения обсадной колонны или клапанов и так далее.
На фиг. 2а показан кабельный буровой инструмент 1а, подвешенный внутри обсадной колонны 50 в скважине, содержащий буровое долото 2, средство 4 для продвижения бурового долота и управления нагрузкой на буровое долото, вращающее средство 5 для вращения бурового долота и управления скоростью вращения бурового долота, и один или более датчиков 10, 11, 12 вибрации, выполненных с возможностью передачи детектируемых вибраций, возникающих в ходе работы кабельного бурильного инструмента. Один или более датчиков вибрации расположен(ы) на конце инструмента, противоположном концу бурового долота, и расположен(ы) внутри кабельного инструмента, на внутренней поверхности корпуса инструмента, как показано на фиг. 3. Таким образом, корпус инструмента передает вибрации к акселерометрам, детектирующим вибрации, причем модуль обработки внутри инструмента выполнен с возможностью обработки поступающей от акселерометров информации и отправки сигнала к устью скважины через кабель 60, показанный на фиг. 2а. В кабельном буровом инструменте 1а, показанном на фиг. 2а, средство 4 для продвижения бурового долота представляет собой скважинный трактор 4, обеспечивающий поступательное движение вперед посредством множества ведущих колес 41, выступающих в сторону стенки обсадной колонны 50. Кроме того, скважинный трактор выполняет функцию центратора 61. Колеса могут приводиться в движение гидравлической системой и обеспечивать необходимую тягу для создания нагрузки на долото. Однако, средство 4 для продвижения бурового долота может иметь также поршневую конструкцию, например, гидравлический поршень. Скважинный трактор 4 также может быть использован для других задач, например, для поступательного перемещения вперед кабельного режущего инструмента в наклонных секциях скважины.
На фиг. 2b показан кабельный режущий инструмент 1b, подвешенный внутри обсадной колонны 50 в скважине, содержащий режущее лезвие 3, средство 4 для продвижения режущего лезвия, вращающее средство 5 для вращения режущего лезвия и управления скоростью вращения режущего лезвия, и один или более датчиков 10, 11, 12 вибрации, представляющих собой акселерометры и выполненные с возможностью детектирования вибраций, возникающих в процессе работы кабельного бурового инструмента. Один или более датчиков вибрации расположен(ы) таким образом, что он(и) контактирует(ют) с шасси или корпусом инструмента на конце, наиболее близком к устью скважины и наиболее удаленном от режущего долота. Кроме того, кабельный режущий инструмент 1b может содержать секцию 9 анкерного крепления, предназначенную для анкерного крепления кабельного режущего инструмента в скважине, и/или скважинный трактор 8 для поступательного перемещения вперед кабельного режущего инструмента в наклонных секциях скважины.
На фиг. 3 в поперечном сечении показан вид конца кабельного инструмента, наиболее удаленного от долота и наиболее близкого к кабелю. Акселерометры 10, 11, 12 расположены на внутренней поверхности 62 корпуса инструмента и электрически соединены с модулем 6 обработки. Использование акселерометров обеспечивает возможность детектирования вибраций в корпусе инструмента на расстоянии от долота, создающего вибрации, и, таким образом, возможность расположения датчиков на конце, наиболее близком к устью скважины. Благодаря этому измерения, выполняемые на данном отдаленном конце, могут быть использованы для детектирования ситуации, когда операция резания приводит к прорезанию обсадной колонны, как показано на фиг. 4b. Это возможно благодаря тому, что акселерометры, в отличие от микрофонов, намного лучше детектируют слабые колебания, и поэтому использование акселерометров обеспечивает приемлемые и достоверные результаты, что может быть легко реализовано в существующих инструментах.
Для сравнения частотного спектра в реальном времени с эталонным частотным спектром для каждого спектра рассчитывается центр плотности колебаний, и затем данные два центра плотности сравниваются. Вычисление центра плотности показано на фиг. 4а, где для определения центра плотности колебаний рассчитывается в виде средневзвешенного значения суммарная площадь пиков в частотном спектре, которые превышают заданное значение 78. Вычисление центра плотности колебаний эталонного частотного спектра дает в результате наборы данных, изображенных на графике в окружности 14 на фиг. 4b. Окружность показывает максимальные и минимальные интервалы, в которых операция еще выполняется согласно плану. На фиг. 4b показан график центра плотности области пиков в частотном спектре в реальном времени, причем упомянутая область находится выше определенного значения, и, как показано, когда работа режущего долота выполняется согласно плану, значение центра плотности колебаний находится внутри окружности и составляет 90-100 при частоте приблизительно 1120 Гц. Когда долото начинает прорезать стенку обсадной колонны, значение центра плотности увеличивается и затем уменьшается ниже 70. Это происходит вследствие того, что обсадная колонна, будучи частично прорезанной, имеет частоту собственных колебаний, которая по существу отличается от частоты собственных колебаний неразрезанной обсадной колонны и которая может быть детектирована акселерометром, расположенным на расстоянии от долота. Эталонную частоту определяют таким образом, чтобы иметь возможность определения расхождения между эталонным частотным спектром и частотным спектром в реальном времени. Когда расхождение превышает определенный уровень и набор данных выходит за пределы окружности, это означает, что долото скоро пройдет через обсадную колонну. Заданное значение может быть установлено на значении амплитуды больше 40, предпочтительно больше 50, более предпочтительно больше 60. По оси ординат указаны значения центра плотности области пиков в частотном спектре в реальном времени, превышающие заданное значение. Таким образом, ось ординат отображает число, рассчитанное чисто "теоретически".
При использовании способа вычисления центра плотности колебаний, показанного на фиг. 5, вычисление центра плотности колебаний эталонного частотного спектра производится перед детектированием частотного спектра в реальном времени. Определяют интервалы минимума и максимума, которые показаны окружностью 14 на фиг. 4b. Затем рассчитывают центр плотности частотного спектра в реальном времени и сравнивают его с центром плотности эталонного частотного спектра, в результате чего определяют, находится ли частотный спектр в реальном времени в пределах интервалов минимума и максимума или выходит за эти пределы. Если оцениваемый спектр в реальном времени выходит за пределы интервалов и набор данных центра плотности находится выше интервала, операция продолжается, поскольку прорезание обсадной колонны должно завершиться в ближайшее время согласно плану. Если следующий набор данных центра плотности частотного спектра в реальном времени расположен на кривой, показанной на фиг. 4b, операция выполняется согласно плану. Если же следующий набор данных центра плотности частотного спектра в реальном времени расположен по существу вне кривой, операцию останавливают, либо изменяют параметры операции.
Как показано на блок-схеме на фиг. 5, инструмент погружают в скважину и инициируют операцию резания или бурения. Вибрации, генерируемые в ходе данной операции резания или бурения, передаются посредством корпуса инструмента и детектируются датчиком вибрации. На основании вибраций, детектируемых в ходе первой части операции, получают сигнал вибрации и эталонный частотный спектр. Далее рассчитывают центр плотности эталонного частотного спектра и определяют минимум и максимум центра плотности, представленные окружностью 14, показанной на фиг. 4b. После этого детектированные вибрации продолжаются, и получают частотный спектр в реальном времени, рассчитывают центр плотности частотного спектра в реальном времени и сравнивают его с центром плотности эталонного частотного спектра. Если центр плотности частотного спектра в реальном времени выходит за пределы расчетного интервала минимума и максимума, выполняют соответствующее управление операцией.
Как показано на блок-схеме на фиг. 1, управление операцией можно выполнять также без вычисления центра плотности колебаний. После инициирования операции резания или бурения вибрации, возникающие в ходе данной операции, детектируются датчиком вибрации, контактирующим с корпусом инструмента. На основании вибраций, детектируемых в ходе первой части операции, получают сигнал вибрации и эталонный частотный спектр. Затем детектируемые вибрации продолжаются, и получают частотный спектр в реальном времени и сравнивают его с эталонным частотным спектром. Если имеется расхождение между частотным спектром в реальном времени и эталонным частотным спектром, выполняют соответствующее управление операцией.
Кабельный буровой инструмент и кабельный режущий инструмент дополнительно содержат модуль 6 обработки для обработки сигналов вибрации, регистрируемых датчиками вибрации, и модуль 7 управления для управления буровым инструментом или режущим инструментом на основании оценки регистрируемых вибраций.
Под буровым долотом или режущим долотом понимается любой тип подходящего инструмента, посредством которого выполняют резание или бурение стенки обсадной колонны и, таким образом, разделение обсадной колонны на две части, например, режущее лезвие, установка для резки и так далее.
Под обсадной колонной понимается любой тип трубы, трубчатого элемента, трубопровода, хвостовика, колонны труб и так далее, используемый в скважине для добычи нефти или природного газа.
В том случае, когда невозможно полностью погрузить инструмент в обсадную колонну, можно использовать скважинный трактор для проталкивания инструмента до нужного положения в скважине. Скважинный трактор представляет собой любой вид приводного инструмента, способного толкать или тянуть инструменты в скважине, например, Well Tractor®.
Хотя изобретение описано на примере предпочтительных вариантов осуществления, специалисту в данной области техники очевидно, что возможны модификации данного изобретения, не выходящие за пределы объема правовой охраны изобретения, определенные нижеследующей формулой изобретения.
Данное изобретение относится к способу управления операцией бурения или резания, выполняемой кабельным инструментом в скважине, содержащему этапы: запуска операции бурения или резания в скважинном объекте, например в обсадной колонне или клапане; детектирования вибраций в корпусе инструмента, создаваемых в ходе операции бурения или резания в скважинном объекте, с использованием датчика вибрации, выполненного с возможностью передачи детектируемых вибраций; обработки сигнала вибрации от датчика вибрации для получения частотного спектра в реальном времени; сравнения этого частотного спектра с эталонным частотным спектром и управления операцией на основании упомянутого сравнения частотного спектра и характеристик частотного спектра. Изобретение также относится к кабельному инструменту для выполнения операции бурения или резания в скважине и осуществления способа согласно изобретению. Техническим результатом является определение правильности выбора нагрузки на долото и скорости вращения бурового долота и/или слежение за соответствием процесса бурения или резания плану и возникновением непредвиденных условий. 2 н. и 11 з.п. ф-лы, 5 ил.
1. Способ управления операцией бурения или резания, выполняемой кабельным инструментом в скважине, содержащий следующие этапы:
- запуск операции бурения или резания в скважинном объекте, например в обсадной колонне (50) или клапане (30),
- детектирование вибраций в корпусе инструмента, создаваемых в ходе операции бурения или резания в скважинном объекте, с использованием датчика (10, 11, 12) вибрации, представляющего собой акселерометр, расположенный на корпусе инструмента,
- обработка сигнала вибрации от датчика вибрации для получения эталонного частотного спектра (20) в первой части операции бурения или резания,
- обработка сигнала вибрации от датчика вибрации для получения частотного спектра (21) в реальном времени,
- сравнение упомянутого частотного спектра с эталонным частотным спектром (20),
- вычисление и детектирование завершения или сбоя операции, например завершения после разрезания обсадной колонны на две секции обсадной колонны или сбоя при застревании долота, выполняемые на основании сравнения частотного спектра в реальном времени и эталонного частотного спектра, и
- управление операцией для прекращения операции при детектировании завершения или сбоя операции,
причем этап вычисления и детектирования завершения операции содержит этап вычисления центра плотности колебаний в области пиков в упомянутом частотном спектре, причем упомянутая область превышает заданное значение, и сравнения данного центра плотности с центром плотности в области пиков в эталонном частотном спектре, при этом упомянутая область превышает то же заданное значение для определения расхождения между упомянутыми двумя центрами плотности, и при этом этап управления операцией основан на упомянутом сравнении центра плотности.
2. Способ по п. 1, в котором этап обработки сигнала вибрации от датчика вибрации для получения эталонного частотного спектра (20) выполняют в первой части операции бурения или резания после окончания фазы пуска.
3. Способ по п. 1 или 2, дополнительно содержащий этап прекращения операции бурения или резания в скважинном объекте, если упомянутое расхождение превышает заданное пороговое значение.
4. Способ по п. 1 или 2, дополнительно содержащий этап определения того, что происходит бурение или резание скважинного объекта, когда упомянутое расхождение между эталонным частотным спектром и частотным спектром в реальном времени больше или меньше заданного порогового значения.
5. Способ по п. 1 или 2, дополнительно содержащий этап отправки вверх по стволу скважины сигнала о том, что операция была выполнена с приемлемым расхождением между частотным спектром в реальном времени и эталонным частотным спектром.
6. Способ по п. 1 или 2, дополнительно содержащий этап управления скоростью вращения бурового долота и нагрузкой на долото на основании упомянутого расхождения между эталонным частотным спектром и частотным спектром в реальном времени.
7. Способ по п. 1 или 2, дополнительно содержащий этап определения, что износ бурового долота чрезмерен, на основании упомянутого расхождения между эталонным частотным спектром и частотным спектром в реальном времени.
8. Способ по п. 1 или 2, дополнительно содержащий этап детектирования изменения в упомянутом расхождении между эталонным частотным спектром и частотным спектром в реальном времени, указывающего, что стенка обсадной колонны полностью пробурена или прорезана.
9. Кабельный инструмент (1) для выполнения операции бурения или резания в скважине и осуществления способа по любому из пп. 1-8, содержащий:
- корпус инструмента, имеющий внутреннюю поверхность (62),
- буровое долото (2) или режущее долото (3),
- средство (4) для продвижения бурового долота или режущего долота,
- вращающее средство (5) для вращения бурового долота или режущего долота, и
- один или более датчиков (10) вибрации,
причем один или более датчиков вибрации представляет(ют) собой акселерометр(ы), расположенный(ые) в контакте с внутренней поверхностью корпуса инструмента и выполненный(ые) с возможностью детектирования вибраций в корпусе инструмента, передающем вибрации, возникающие в ходе работы кабельного бурового или режущего инструмента, к упомянутым одному или более датчикам,
при этом кабельный инструмент дополнительно содержит модуль (6) обработки для обработки сигнала вибрации от датчика вибрации, чтобы получать частотный спектр (21) в реальном времени, и для сравнения упомянутого частотного спектра с эталонным частотным спектром (20).
10. Кабельный инструмент по п. 9, в котором упомянутые один или более датчиков вибрации расположен(ы) на конце инструмента, наиболее удаленном от бурового долота или режущего долота.
11. Кабельный инструмент по п. 9 или 10, в котором упомянутые датчики вибрации расположены вдоль окружности внутренней поверхности.
12. Кабельный инструмент по п. 9 или 10, причем инструмент содержит массив датчиков вибрации, расположенных вдоль внутренней поверхности.
13. Кабельный инструмент по п. 9 или 10, в котором средство (4) для продвижения бурового долота или режущего долота представляет собой скважинный трактор.
| US 6712160 B1, 30.03.2004 | |||
| СПОСОБ КОНТРОЛЯ ОСЕВОЙ НАГРУЗКИ НА ДОЛОТО ПО КПД БУРЕНИЯ | 2006 |
|
RU2333351C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОЦЕССА БУРЕНИЯ | 1995 |
|
RU2093674C1 |
| US 2007251687 A1, 01.11.2007. | |||

