Область техники, к которой относится изобретение
Настоящее изобретение относится к способу эксплуатации тормозного устройства, в частности, установленного в транспортном средстве, состоящего при этом из рабочего тормоза и механического стояночного тормоза, приводимого в действие механическим исполнительным элементом.
Уровень техники
Известно использование в автомобилях специальных исполнительных элементов для стояночного тормоза, например рычага ручного тормоза или ножного рычага. Под стояночными тормозными системами понимают такие механические стояночные тормозные системы, которые соединены с исполнительным элементом во внутреннем салоне автомобиля, например, с помощью тросового привода. Водитель задействует исполнительный элемент, т.е. тянет рычаг ручного тормоза вверх или нажимает на педаль тормоза, что приводит к созданию момента силы, превращаемого тросовым приводом в тяговое усилие, благодаря которому обеспечивается прижимающая сила стояночной тормозной системы.
В других стояночных тормозных системах такая создаваемая водителем сила заменена электромеханической. Это означает, что для приведения в действие и освобождения стояночной тормозной системы используют переключающее устройство. Например, в документе DE 10345485 А1 предложено тормозное устройство с рабочим и стояночным тормозом, в котором стояночный тормоз задействуется с помощью такого переключающего устройства, при этом для создания гидравлического давления в тормозном устройстве предусмотрено гидравлическое устройство генерации давления. Самотормозящийся электрический двигатель обеспечивает дополнительное срабатывание стояночного тормоза. Как устройство создания гидравлического давления, так и электрический двигатель соединены с исполнительным элементом. В случае задействования функции стояночного тормоза после гидравлического давления используется дополнительное срабатывание, при этом действующая сила дополнительного срабатывания больше действующей силы гидравлического привода.
В таких стояночных тормозных системах, приводимых в действие переключающим устройством, при задействовании переключателя, как правило, создается максимальная удерживающая сила стояночной тормозной системы. На первый взгляд, кажется, что такой вариант предпочтителен, но на самом деле у него также имеются и недостатки. Например, водитель фактически не получает непосредственной информации об удерживающей силе, примененной с помощью изначального исполнительного элемента, так как переключатель был просто нажат, потянут или задействован каким-либо другим образом, а максимальная удерживающая сила применяется постоянно, причем соответствующие исполнительные механизмы задействованы с помощью электрического сигнала. Например, стояночная тормозная система либо задействована с максимальной силой торможения, либо удерживается в свободном состоянии, аналогично положениям 0 и 1 двоичной системы. Некоторые водители, с другой стороны, предпочли бы плавное регулирование удерживающей силы между двумя крайними положениями (освобожденным положением и положением с максимальным удерживающим усилием), и получать соответствующую информацию о реальной удерживающей силе. Например, не всегда требуется создавать максимальную удерживающую силу, когда при небольшом уклоне на месте стоянки автомобиля требуется сравнительно меньшая удерживающая сила, равно как и меньшее разъединяющее усилие. Некоторые водители также используют стояночный тормоз для облегчения рулевого управления или в качестве аварийного тормоза для вывода автомобиля из критической ситуации. Как раз при таких маневрах неконтролируемая удерживающая сила является нежелательной, а иногда и опасной.
Однако при использовании механических стояночных тормозных систем может случиться так, что с помощью исполнительного элемента должна быть применена очень высокая удерживающая сила, вплоть до максимальной. Для того чтобы с помощью стояночного тормоза обезопасить автомобиль от скатывания в определенных условиях, например, при большом уклоне на месте стоянки автомобиля (например, 20-30%), при использовании механической стояночной тормозной системы может потребоваться большая прижимающая и/или удерживающая сила. Для того чтобы можно было легко создавать такие усилия, было бы целесообразным, например, увеличить захватную длину рычага ручного тормоза. Однако такой вариант не является предпочтительным с точки зрения положения сиденья, а также расстояния захвата и геометрии тяги водителя. Кроме того, в этом случае удлиненный рычаг ручного тормоза может негативно повлиять на дизайн и эргономику салона, в том числе из-за возможной нехватки свободного пространства.
Поэтому задачей настоящего изобретения является разработка усовершенствованного способа эксплуатации тормозного устройства с механическим стояночным тормозом.
Раскрытие изобретения
Решение данной задачи обеспечивается за счет применения способа, охарактеризованного в п.1 формулы изобретения.
Дополнительные, особенно преимущественные варианты воплощения изобретения представлены в зависимых пунктах формулы изобретения.
Необходимо отметить, что признаки, описанные в нижеследующем описании по отдельности, могут быть объединены друг с другом любым технически разумным образом и тем самым образовывать новые варианты воплощения изобретения. В описании также приведены характеристики и примеры реализации изобретения.
Механический исполнительный элемент в соответствии с настоящим изобретением представляет собой ножную педаль или, более предпочтительно, ручной рычаг, который также известен как рычаг ручного тормоза, причем исполнительный элемент, например, инициирует как активизацию, так и высвобождение удерживающих элементов с помощью тросового привода. Стояночный тормоз может также называться ручным или иммобилизующим тормозом. Рабочий тормоз в соответствии с настоящим изобретением представляет собой электронную тормозную систему, оснащенную, например, устройством ESP (системой контроля устойчивости), при этом силы торможения могут создаваться с помощью гидравлической системы. Такие электронные тормозные системы известны из уровня техники, поэтому здесь подробно не описаны.
С точки зрения достижения вышеуказанной цели установлено, что исполнительный элемент переводится из нейтрального положения в рабочее положение, что, например, может быть показано соответствующими датчиками. Датчики генерируют управляющий сигнал одновременно с установлением факта задействования исполнительного элемента и передают его на рабочий тормоз и/или, более предпочтительно, на его устройство создания давления, например на гидравлический насос устройства ESP. Разумеется, между ними может быть предусмотрен также и центральный контроллер (CPU). При этом понятие «одновременно» в соответствии с настоящим изобретением должно обозначать только генерацию управляющего сигнала вместе с установлением факта задействования исполнительного элемента, то есть одновременный процесс электрического контроля, другими словами, передачи электрического сигнала. Разумеется, имеется определенная задержка механических компонентов до отклика гидравлического насоса устройства ESP на управляющий сигнал.
Если управляющий сигнал направлен к гидравлическому насосу рабочего тормоза и/или устройства ESP, то гидравлическое давление рабочего тормоза или устройства ESP создается и/или нарастает, причем гидравлический насос запускается и/или работает в соответствии с управляющим сигналом (с временной задержкой). Полученное гидравлическое давление влияет на работу стояночного тормоза или тормозных элементов, повышая удерживающую силу. Возможно, что водителю нужно будет прикладывать меньшее усилие для перевода исполнительного элемента в положение максимального использования, независимо от наличия или отсутствия информации о реально используемой удерживающей силе. Любая используемая гидравлическая поддержка приводит к снижению усилия, производимого водителем. Вместе с этим, в результате применения давления, уменьшается информация, поступающая к водителю при таком же прижимающем усилии. Однако предпочтительно, чтобы стояночный тормоз поддерживался устройством ESP и/или его гидравлическим насосом.
Механические стояночные тормозные системы, известные до сих пор, были оснащены исполнительным элементом, который обеспечивал максимальную удерживающую силу по принципу силового рычага, который означает, что, например, для получения большой удерживающей силы при относительно небольшом приложенном усилии рычаг ручного тормоза должен быть удлинен. Особым преимуществом настоящего изобретения является то, что, в частности, нет необходимости удлинять рычаг ручного тормоза для получения такой же большой удерживающей силы. Причина заключается в том, что необходимая удерживающая сила стояночного тормоза достигается во время взаимодействия механического стояночного тормоза, имеющего рабочий тормоз, с устройством ESP и/или его гидравлическим насосом соответственно. Таким образом, можно использовать относительно короткий рычаг ручного тормоза, с помощью которого было бы невозможно достичь максимальной удерживающей силы из-за передаточного отношения; однако такое возможно в настоящем изобретении, так как максимальная удерживающая сила может быть достигнута даже при использовании короткого рычага ручного тормоза. Другими словами, гидравлическое давление поддерживает создание удерживающей силы. Однако в соответствии с настоящим изобретением это не значит, что рабочий тормоз действует аналогичным образом и/или с увеличенным эффектом торможения, когда задействован стояночный тормоз. Напротив, задействован только стояночный тормоз. Увеличение гидравлического давления предназначено только для поддержки во время задействования исполнительного элемента. Таким образом, удается избежать необходимости постоянно поддерживать гидравлическое давление для сохранения удерживающей силы в припаркованном автомобиле. Рабочий и стояночный тормоз работают с общими тормозными элементами. Гидравлическое давление гидравлического насоса, например устройства ESP, таким образом воздействует на тормозные элементы, что они активизируются. Однако одновременно с этим функционирует механический стопор механического стояночного тормоза, так что тормозные элементы стопорятся и остаются задействованными, когда исполнительный элемент больше не активизирован и/или не поднят (для ручного тормоза) или не утоплен (для педали тормоза) дальше.
Следовательно, гидравлический насос устройства ESP функционирует, только когда задействован исполнительный элемент. Для ослабления удерживающего усилия стопор высвобождают известным образом. Реальное задействование тормозных элементов непосредственно влияет на сопротивление исполнительного элемента при его задействовании. При увеличении рабочего усилия рабочее сопротивление исполнительного элемента также возрастает.
Также преимущественной является возможность плавно переводить исполнительный элемент из нейтрального в рабочее положение. Это означает, что по большому счету нет необходимости переводить исполнительный элемент в положение максимального использования для достижения максимальной удерживающей силы. Напротив, можно выбирать промежуточные рабочие положения, если, например, уклон опорной поверхности автомобиля является небольшим. Стопор стояночного тормоза работает во всех промежуточных рабочих положениях, как описано выше. Водитель также может контролировать применяемое удерживающее усилие. Также возможно, если автомобиль двигается со скоростью, стремящейся к нулю, либо стоит на месте, обеспечить только взаимодействие рабочего тормоза и/или гидравлического насоса устройства ESP со стояночным тормозом. В устройстве управления может быть записана программа, которая регулирует реальные значения динамики движения в соответствии с записанными граничными значениями, для поддержания важной функции ESP, причем этот способ не применяется, если системе ESP необходимо вмешаться для обеспечения стабильности в определенных дорожных ситуациях. Аналогичным образом, во время движения автомобиля возможно использование исключительно механического усилия стояночного тормоза, в том числе и в качестве аварийного тормоза.
Разумеется, гидравлическая поддержка удерживающего усилия может быть достигнута даже при выключенном зажигании. Для этого нужно только соответствующим образом отрегулировать устройство ESP.
Кроме того, в соответствии с настоящим изобретением является преимуществом, если гидравлическая поддержка стояночного тормоза регулируется в зависимости от статического или динамического состояния автомобиля. Статическое или динамическое состояние можно определить, например, с помощью сигналов скорости вращения колес, а также с помощью соответствующих колесных датчиков, показывающих частоту вращения колес.
Если установлено, что автомобиль находится в статическом состоянии, т.е. стоит или почти остановился, и что задействован исполнительный элемент, то устройство ESP и/или его гидравлический насос дает нагрузку на колесные тормозные цилиндры, в частности на тормозные цилиндры задних колес, с постоянным гидравлическим давлением, поддерживающим максимальный удерживающий момент. Если исполнительный элемент теперь зафиксирован в выбранном положении, то обеспечивается предварительная гидравлическая затяжка колесных тормозов и/или задних колесных тормозов. Таким образом, цель достигается, если во время фазы гидравлического давления установлен, т.е. зафиксирован, стояночный тормоз, и удерживающий момент обеспечен статически.
Это можно сделать и более просто, так, чтобы при наличии продолжительного сигнала стояночного тормоза (например, в течение 10 секунд или дольше) можно было предположить, что стояночный тормоз установлен или задействован, и устройство ESP тогда устанавливает гидравлическое давление для задних колесных тормозов на нулевое значение.
Можно поставить дополнительный контролирующий элемент, например, в виде переключателя или датчика, генерирующего соответствующий управляющий сигнал, если исполнительный элемент (рычаг ручного тормоза или педаль тормоза) зафиксирован по меньшей мере на первом зубце. Это соответствующим образом детектируется блоком управления устройства ESP и/или центральным контроллером, при этом при задействовании исполнительного элемента в статическом режиме на задние скобы дискового тормозного механизма подается гидравлическая нагрузка, которая поддерживается в зависимости от изменения событий.
Другими словами, гидравлическое давление поддерживается, пока по заданному активирующему сигналу не будет сгенерирован сигнал, что тормозной элемент находится в зацеплении, т.е. использован стояночный тормоз, или пока не будет отменен установленный активирующий сигнал, и, кроме того, не будет сгенерирован сигнал о том, что тормозной элемент остается в пассивном зафиксированном состоянии, т.е. что стояночный тормоз не использован.
В одном из вариантов воплощения изобретения при задействовании исполнительного элемента и таким образом при задействовании дополнительного гидравлического давления можно добиться максимально возможного момента торможения с помощью устройства ESP и/или его гидравлического насоса. Момент удерживающих сил, полученный таким образом, больше по сравнению с удерживающими моментами, генерируемыми только с помощью электрического переключателя (электрической стояночной тормозной системы) или по сравнению с удерживающими моментами, прикладываемыми только механически, так как результирующий момент удерживающих сил больше на величину активирующей силы исполнительного элемента, т.е. на эту долю механического воздействия.
В другом возможном варианте воплощения настоящего изобретения сила может быть увеличена прямо пропорционально ходу рычага, что реализуется с помощью соответствующего углового датчика, предпочтительно расположенного на исполнительном элементе. Сигнал углового датчика может быть преобразован в устройстве ESP, в его блоке управления и/или в центральном контроллере, в результате чего гидравлический насос будет запущен соответствующим образом.
Если стояночный тормоз находится в динамическом режиме (колеса вращаются с заранее заданной частотой) и если был задействован исполнительный элемент, устройство ESP регулируется таким образом, чтобы на колесные тормоза (предпочтительно, задние) подавалась нагрузка гидравлическим давлением, которое соответствует замедлению, например, в 1,5 м/с2 при максимальной загрузке автомобиля, таким образом, чтобы определенный отклик стояночного тормоза в динамическом режиме был сравним с функцией «Jump In» (скачок). Другими словами, начальное замедление является скачкообразной функцией с уменьшающейся амплитудой и обеспечивает определенную задержку старта. Замедление может быть дополнительно пропорционально увеличено путем активирующей силы исполнительного элемента.
В соответствии с настоящим изобретением исполнительный элемент должен быть выполнен в соответствии с действующими нормами, например, требованиями законодательства, при этом динамическое замедление также должно выполняться и без гидравлической поддержки. Нижний порог величины замедления не должен быть менее 1,5 м/с2.
Краткое описание чертежей
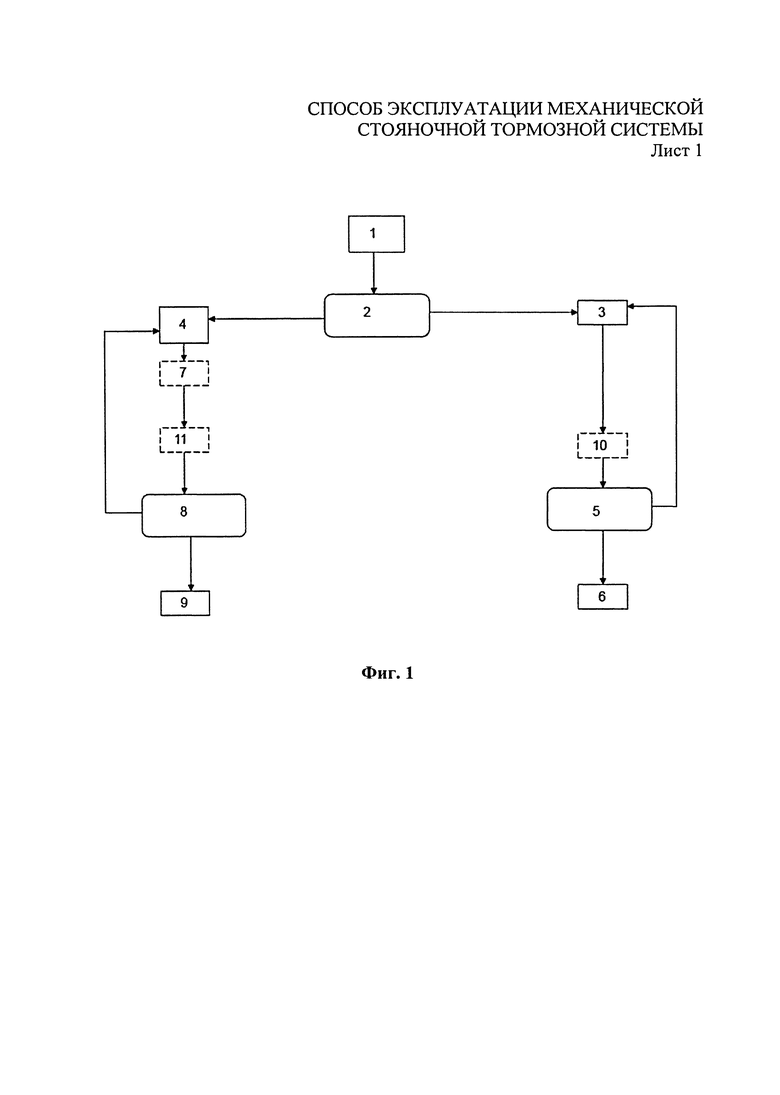
На Фиг.1 представлена схема реализации способа в соответствии с настоящим изобретением.
Осуществление изобретения
Способ по изобретению начинается в блоке 1, в котором устанавливается, что исполнительный элемент был переведен из нейтрального положения в рабочее положение. Другими словами, в блоке 1 устанавливается, нужно ли активировать стояночный тормоз.
В блоке 2 принятия решений определяется, преобладает ли динамический режим торможения или статический режим торможения с помощью стояночного тормоза, что может быть детектировано на основании скорости вращения колес, то есть с использованием соответствующих датчиков.
Оба сигнала «Скорость вращения колес» и «Задействование стояночного тормоза» соответствующим образом обрабатываются в блоке 2, в результате чего генерируется управляющий сигнал. Если режим торможения был определен как статический, то способ переходит в блок 3. Если режим торможения был определен как динамический, то способ переходит в блок 4.
В статическом режиме в блоке 3 генерируется сигнал, запускающий гидравлический насос устройства ESP, при этом предпочтительно генерируется максимальное гидравлическое давление, которое воздействует на задние колесные тормоза или задние осевые тормоза таким образом, что создается максимальный удерживающий момент. Это значит, что гидравлическое давление имеет такое значение, которое создает момент торможения, который может удерживать автомобиль при полной загрузке (Gross Vehicle Weight Condition; GVW-Condition) на уклоне поверхности 30%.
В блоке 5, который следует за блоком 3, определяется, присутствует ли сигнал стояночного тормоза дольше заданного времени, например более 10 секунд. Если это не так, то происходит возврат к блоку 3. Если ответ положительный, то способ переходит к блоку 6. Приведенные числовые значения, разумеется, даны исключительно в качестве примера.
В блоке 6 статический режим завершается, гидравлическое давление, воздействующее на задние колесные и/или осевые тормоза, снижается и/или сбрасывается до нуля. Разумеется, стояночный тормоз механически блокируется, т.е. удерживается таким образом в активированном состоянии, пока исполнительный элемент не вернется в нейтральное положение, и стояночный тормоз не будет освобожден из механического блокирующего устройства.
Если выявлен динамический режим торможения, способ продолжается в блоке 4 и вызывает задержку роста давления таким образом, что устройство ESP и/или его гидравлический насос создают заданное гидравлическое давление, необходимое для торможения задних осей в динамическом режиме торможения. При этом создается момент торможения и/или удерживающий момент, обеспечивающий замедление в 0,15G при условии полной загрузки (Gross Vehicle Weight Zustand; GVW - Condition).
В качестве дополнительного варианта после блока 6 может идти блок 7, при использовании которого замедление выполняется пропорционально активирующей силе исполнительного элемента, когда создано начальное замедление (блок 6).
В блоке 8 принятия решений, которые следует за блоком 6 или блоком 7, определяется, активен ли сигнал стояночного тормоза. Если сигнал активен, происходит возврат к блоку 4. Если нет, то динамический режим завершается в блоке 9, при этом гидравлическое давление, воздействующее на задние колесные или осевые тормоза, снижается или сбрасывается до нуля.
В одном варианте выполнения может генерироваться еще один дополнительный сигнал, показывающий, что исполнительный элемент зафиксирован по меньшей мере в одном из своих рабочих положений, т.е. по меньшей мере на первом зубце храпового механизма. Используя такой сигнал, в блоке 5 может быть заменен запрос - вместо предыдущего запроса о периоде активности стояночного тормоза применен запрос о том, зафиксирован ли исполнительный элемент. При отрицательном результате запроса происходит возврат к блоку 3, в противном случае - переход к блоку 6.
В другом варианте выполнения в дополнение к уже упомянутым сигналам в методику также может быть включен сигнал об активирующей силе исполнительного элемента. Такой сигнал можно получить от углового датчика. Если этот сигнал дополнительно использован в качестве входного сигнала, в необязательном блоке 10, следующим за блоком 3, может быть пропорционально увеличена сила, а в последующем блоке 5 запрашивается, зафиксирован ли стояночный тормоз, и, в зависимости от результата этого запроса, происходит возврат к блоку 3 или переход к блоку 6. В ответвление для динамического режима может быть добавлен необязательный блок 11, который, как и блок 10, может пропорционально увеличивать силу. Тогда за блоком 11 следует блок 8 с запросом о сигнале стояночного тормоза.
Изобретение относится к области автомобилестроения, в частности к способам эксплуатации тормозного устройства. Способ эксплуатации тормозного устройства содержит рабочий тормоз и механический стояночный тормоз, выполненный с возможностью активации механическим исполнительным элементом, при котором выполняют этапы, на которых определяют, был ли перемещен исполнительный элемент из нейтрального положения в рабочее положение, одновременно управляют элементом повышения давления, увеличивают величину давления гидравлической жидкости, прикладывают максимальную величину давления гидравлической жидкости к общему тормозному элементу и блокируют общий тормозной элемент рабочего тормоза и стояночного тормоза с помощью механического стопора механического стояночного тормоза. Достигается улучшение эксплуатационных характеристик за счет усовершенствования способа эксплуатации тормозного устройства с механическим стояночным тормозом. 8 н.п. ф-лы, 1 ил.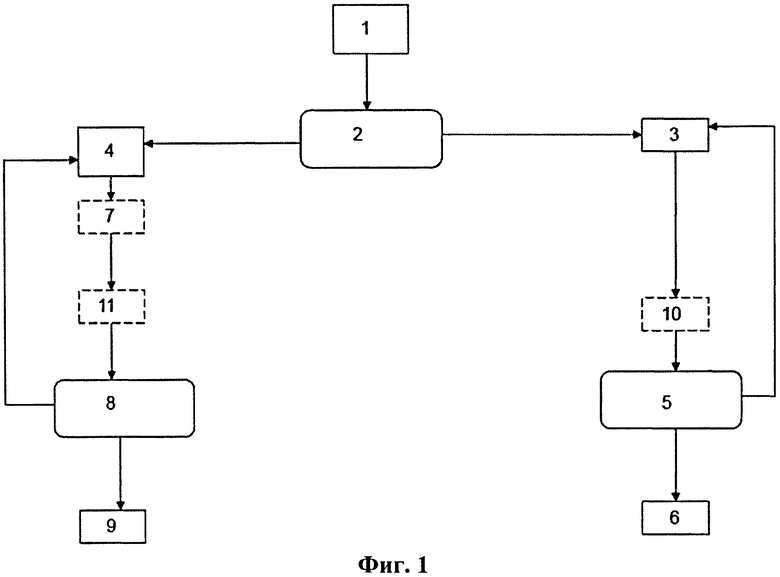
1. Способ эксплуатации тормозного устройства, содержащего рабочий тормоз и механический стояночный тормоз, выполненный с возможностью активации механическим исполнительным элементом, при котором выполняют, по меньшей мере, следующие этапы, на которых:
определяют, был ли перемещен исполнительный элемент из нейтрального положения в рабочее положение,
одновременно управляют элементом повышения давления, обеспечивающим повышение давления гидравлической жидкости, воздействующего на общий тормозной элемент рабочего и механического стояночного тормозов, причем величина увеличения прикладываемого давления гидравлической жидкости зависит от статического или динамического состояния,
увеличивают величину давления гидравлической жидкости, воздействующего на общий тормозной элемент на основе степени задействования исполнительного элемента в динамическом состоянии,
прикладывают максимальную величину давления гидравлической жидкости к общему тормозному элементу при любой степени задействования исполнительного элемента в статическом состоянии и
блокируют общий тормозной элемент рабочего тормоза и стояночного тормоза с помощью механического стопора механического стояночного тормоза.
2. Способ по п.1, при котором дополнительно управляют гидравлическим насосом устройства системы контроля устойчивости (ESP), который наращивает гидравлическое давление.
3. Способ по п.2, при котором элемент повышения давления получает такой управляющий сигнал, который соответствует степени задействования исполнительного элемента, так что элемент повышения давления обеспечивает повышение давления гидравлической жидкости, соответствующего управляющему сигналу и воздействующего на тормозные элементы.
4. Способ по п.3, при котором сопротивление при задействовании исполнительного элемента увеличивают с увеличением отклонения от нейтрального положения.
5. Способ по п.4, при котором стояночный тормоз устанавливают во время гидравлической фазы, а удерживающий момент статически фиксируют.
6. Способ по п.5, при котором используют дополнительный контролирующий элемент, который генерирует управляющий сигнал, если исполнительный элемент зафиксирован на по меньшей мере первом зубце.
7. Способ по п.6, при котором гидравлическое давление поддерживают до тех пор, пока по заданному активирующему сигналу не будет сгенерирован сигнал, что тормозной элемент стояночного тормоза зафиксирован, или пока не будет отменен установленный активирующий сигнал, и не будет сгенерирован дополнительный сигнал о том, что тормозной элемент остается в пассивном зафиксированном состоянии и стояночный тормоз не зафиксирован.
8. Способ по п.7, при котором обеспечивают увеличение силы, прилагаемой к тормозному элементу, пропорционально ходу исполнительного элемента.
9. Способ по п.8, при котором в динамическом состоянии к задним колесным тормозам прикладывают заданное давление гидравлической жидкости, которое соответствует заданному умеренному замедлению в загруженном состоянии, так что происходит заданный отклик стояночного тормоза в динамическом состоянии, при этом дальнейшее увеличение замедления пропорционально степени задействования исполнительного элемента.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 6971485 B1, 06.12.2005 | |||
| Гидравлическая головка для контактной сварки | 1937 |
|
SU54344A1 |

