Изобретение относится к области энергосбережения и предназначено для рекуперации энергии элементов гидропривода поворотной платформы одноковшовых экскаваторов.
Известен способ [RU 2533472, МПК F16Н] рекуперации энергии привода экскаватора с применением гидропривода регенерирующего большую долю приводной энергии и предоставляющий ее в распоряжение для других движений привода. Регенерация энергии происходит следующим образом: при приведении в действие поворотного механизма в случае затормаживания поворотной платформы экскаватора тормозная энергия направляется регулируемым устройством на аккумулирование. При необходимости, эта энергия может также через второе реверсивное регулируемое устройство отдаваться другим устройствам, например насосам, соединенным со вторым регулируемым устройством. В аккумуляторе тормозная энергия поворотной платформы накапливается, чтобы ее можно было снова использовать при следующем ускорении. Эта энергия подается тогда снова к служащему в качестве двигателя поворотного механизма регулируемому устройству. При необходимости, накопленная в аккумуляторе энергия может подаваться также к другому реверсивному регулируемому устройству, посредством которого поддерживается, например, рабочая гидравлика других присоединенных систем, например подъемного механизма и т.д. Предлагаемый эффект может быть усилен работой второго гидроаккумулятора для компенсации отобранной у другого гидроаккумулятора или возвращенной гидравлической жидкости. Дополнительный гидроаккумулятор присоединен преимущественно на стороне низкого давления замкнутого гидравлического контура.
Однако известный способ обладает следующими недостатками: невозможность регулирования скоростных режимов механизма соответствующие действующим динамическим нагрузкам, коэффициент загрузки привода λзп остается высоким, не в полной мере используется кинетическая энергия поворотной платформы, усложнение схемы гидропривода, низкая надежность гидровакуумных аккумуляторов в зимний период.
Из известных технических решений наиболее близким по совокупности существенных признаков к заявляемому объекту является энергосберегающий способ регулирования расхода жидкости в гидросистемах [Пат. 2244173, RU F15В 21/14. Энергосберегающий способ регулирования расхода жидкости в гидросистемах и гидросистема для его осуществления/ Щербаков В.Ф.] (содержащих, по меньшей мере, два исполнительных гидродвигателя, питающихся от одного нерегулируемого насоса, логические элементы и регуляторы потока), заключающийся в том, что поток рабочей жидкости от насоса подают одновременно ко всем гидродвигателям через объемный делитель потока, выполненный в виде обратимых гидромашин, отличающийся тем, что избыточный поток рабочей жидкости в гидролинии нагруженного гидродвигателя из дозирующего клапана возвращают через логический элемент на вход объемного делителя потока, а давление рабочей жидкости в гидролинии наиболее нагруженного гидродвигателя поднимают обратимой гидромашиной объемного делителя потока, работающей в данный момент в режиме насоса, последовательно установленного за нерегулируемым насосом, и приводимого обратимой гидромашиной объемного делителя потока, работающей в режиме гидромотора, и при этом рекуперируют энергию возвращаемого потока рабочей жидкости в одной из гидромашин объемного делителя потока, имеющей положительную разность давлений и работающей в данный момент в режиме гидромотора.
Этот способ обладает недостатками:
1. Большие потери при гидравлических сопротивлениях потока рабочей жидкости;
2. Невозможность адаптироваться приводу к резко изменяющейся динамической нагрузке;
3. Нестабильность переходных режимов поворота платформы в единицу времени;
4. Низкие показатели энергоэффективности работы привода;
5. Неэффективное перераспределение мощности привода в соответствии с энергоемкостью тактов при рекуперации энергии;
6. Отсутствие возможности автоматизации энергоемких режимов управления.
Задачей изобретения является разработка способа рекуперации энергии гидропривода поворотной платформы, обеспечивающей преобразование гидравлической энергии в электрическую, частичное использование «потерянной на сопротивлениях» энергии потока рабочей жидкости, адаптацию привода к резко меняющимся значениям сил и моментов инерции, плавность амплитуды переходных режимов, аккумулирование преобразованной энергии, перераспределение сил и моментов по контактным поверхностям приводных механизмов, увеличение рабочего ресурса, улучшение показателей энергоэффективности гидропривода и возможность автоматизации процесса.
Указанный технический результат достигают тем, что предложен способ рекуперации энергии гидропривода поворотной платформы экскаватора, при котором выполняют перераспределение динамической нагрузки по контактным поверхностям исполнительных механизмов и рекуперируют энергию потока рабочей жидкости с дифференцированием скоростных режимов эксплуатации, через программно-логический контроллер, при этом система датчиков считывает значения динамических нагрузок и передает контрольно-измерительный сигнал на программно-логический контроллер, который включает электрорекуператор: либо в режим генератора, накапливая электроэнергию на отдельном аккумуляторе за счет торможения поворотной платформы, либо в режим электродвигателя, расходуют накопленную на отдельном аккумуляторе электроэнергию за счет ускорения платформы, посредством рабочего органа перераспределения динамической нагрузки по элементам привода поворотной платформы экскаватора по заданным режимам эксплуатации.
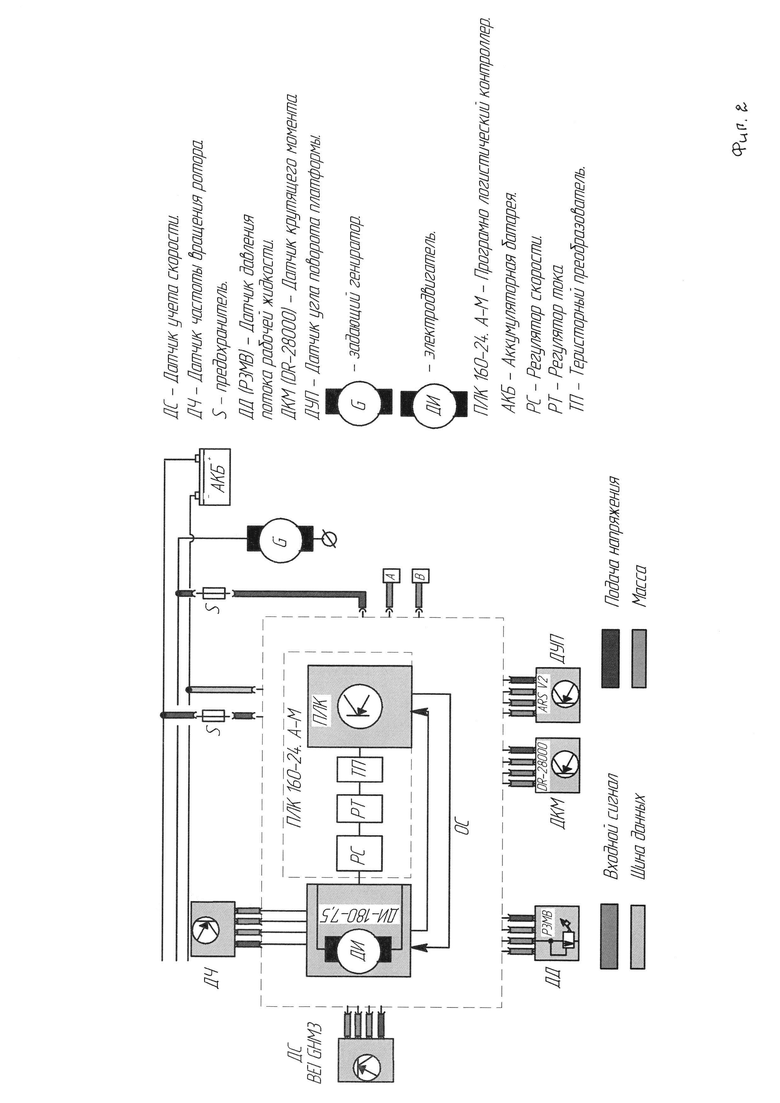
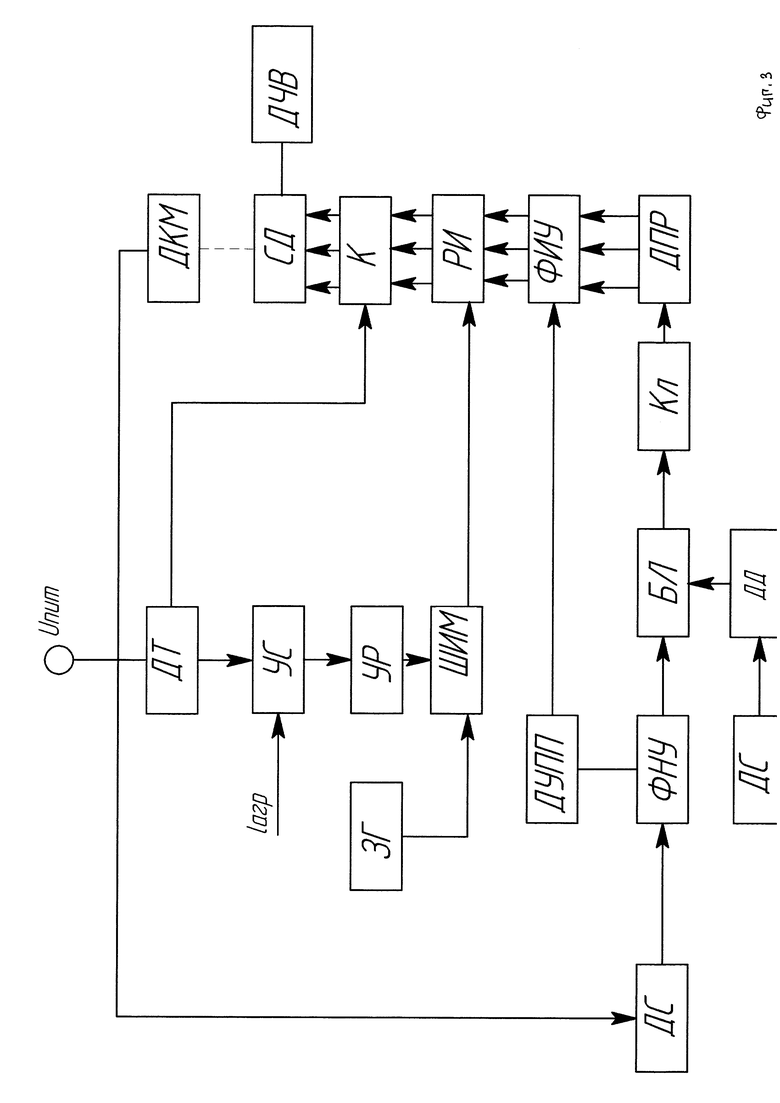
Сущность изобретения поясняется нижеследующим описанием и прилагаемыми к нему чертежами, где на Фиг. 1 приведено одно из возможных устройств энергосберегающего привода поворотной платформы землеройной машины, реализующих предлагаемый способ. На Фиг. 2 представлена функциональная схема системы адаптации крутящих моментов, поясняющая работу системы устройств рекуперации энергии. На Фиг. 3 представлена блок-схема формирования сигналов между системой датчиков рекуперативной системы и программно-логическим контроллером (ПЛК) поворота платформы экскаватора, поясняющая сущность взаимодействия систем в автоматизированном режиме на разных нагрузочных режимах.
Заявляемый способ заключается в следующем. При приведении в действие поворотного механизма поворотной платформы экскаватора гидравлический насос создает давление потока рабочей жидкости 17,5 МПа. Давление жидкости в гидромоторе 5 увеличивает крутящий момент на кинематической паре «венец поворотной платформы - шестерня планетарного редуктора». При резком увеличении динамических нагрузок датчики 3 и 4 определяют изменения крутящего момента (Фиг. 1). Далее сигнал по линиям связи от датчиков 3 и 4 передается на обрабатывающий их ПЛК 9. Анализируя угловые скорости и действующие моменты, ПЛК 9 передает сигнал на электрорекуператор 8 и предохранительный клапан 10 гидравлического привода. С целью понижения давления в гидромоторе 5 срабатывает предохранительный клапан 10. В этот момент гидромотор выполняет функции гидронасоса и одновременно включается электрорекуператор 8 и перераспределяет силы между приводными шестернями 2 и 7 редуктора 6 и электрорекуператора 8 соответственно. Электрорекуператор также обеспечивает стабилизацию действующих инерционных сил собственных масс оборудования при заданном угле поворота платформы 1 (Фиг. 1). Таким образом, при сниженном давлении в гидромоторе 5 распределенные силы преобразуются от моментов инерции собственных масс рабочего оборудования, считываемых датчиками 3 и 4. В момент начала поворота платформы, при резком ускорении (работает как электродвигатель) и в конце такта при резком замедлении (работает как генератор) электрорекуператор обеспечивает наибольший КПД привода. При включении электрорекуператора гидропривод функционирует на более «мягком» режиме и препятствует резкому движению платформы в начале такта поворота. При остановке поворотной платформы электрорекуператор обеспечивает стабильный скоростной режим, компенсируя нарастающий момент инерции до достижения его пиковых значений.
Управление электрорекуператором осуществляется программой, записанной в память ПЛК 160-24. А-М управления поворотной платформы (Фиг. 2). Крутящий момент на ведущем валу редуктора воспринимается датчиком крутящего момента DR-28000 на приводной шестерне. Работа датчика основана на принципе магнитного сопротивления. Высокая надежность работы датчика достигается за счет создания двух независимых зон (резервирование). Для определения крутящего момента на ведущем валу всегда используются два полюса. Второй частью датчика является чувствительный элемент с магнитным сопротивлением, закрепленный на механизме усилителя. Крутящий момент рассчитывается и передается в виде сигнала на ПЛК электрорекуператора при смещении магнита относительно чувствительного элемента. При «постепенном» отключении ПЛК управления поворотной платформы рассчитывает дополнительную силу по данным от датчика угла поворота платформы ARS V2 и электрорекуператора ДИ-180-7,5. Электродвигатель ДИ-180-7,5 рекуператора включается через определенные промежутки времени, контролируемые ПЛК. Датчик угла поворота платформы воспринимает сигнал угла поворота и скорости вращения платформы. Оба сигнала сначала обрабатываются ПЛК, а затем передаются по шине данных CAN на ПЛК 160-24. А-М рекуператора поворотной платформы (Фиг. 1).
Электродвигатель ДИ-180-7,5 постоянного тока обеспечивает максимальный дополнительный крутящий момент 20,5 Н⋅м. Малое время отклика электрорекуператора позволяет поворачивать поворотную платформу в заданном интервале времени. Электрорекуператор передает дополнительную силу на венец опорно-поворотного круга. С другой стороны вала электрорекуператора установлен магнит, который используется ПЛК для определения частоты вращения ротора. Этот сигнал ПЛК определяет скорость вращения поворотной платформы. Датчик частоты вращения ротора электродвигателя передает сигнал на ПЛК 160-24. А-М усилителя поворотной платформы. По входным сигналам: датчика угла поворота ведущей шестерни редуктора ДУП (ARS V2); датчика подачи давления в гидролинию поворота платформы ДД (РЗМВ); датчика крутящего момента ДКМ (DR-28000); датчика частоты вращения ротора электродвигателя электрорекуператора ДЧ; датчика скорости поворотной платформы ДС; через источник питания блока управления в панели приборов, программный контроллер управления определяет величину дополнительной силы. Рассчитанное напряжение подается на электродвигатель ДИ-180-7,5 электрорекуператора привода поворота платформы.
Как наиболее простого и надежного аппарата, блок-схема которого представлена на Фигуре 3. Рассматривая принцип работы механизма, выделим основные моменты функционирования. При повороте платформы в одну сторону сигнал определенной полярности с датчика угла поворота платформы ДУПП (датчик момента) поступает на один из входов формирователя напряжения управления ФНУ, на второй его вход поступает сигнал с датчика угла поворота платформы ДУПП, где происходит их сравнение. С выхода ФНУ поступает сигнал на блок логики БЛ, который через замкнутый ключ Кл управляет датчиком положения ротора ДПР. Последний, в свою очередь, через формирователь импульсов управления ФИУ, связан с распределителем импульсов РИ, на выходе которого формируются специальные сигналы управления шестью ключами коммутатора К, к выходу которого подключен исполнительный электродвигатель ЭД, который отрабатывает и корректирует заданный угол и скорость поворота платформы. При повороте платформы в обратную сторону или возврате в исходное положение, сигнал с ДУПП меняется на противоположный и дополнительно воздействует на ФИУ, на выходе которого два слаботочных сигнала управления меняются местами по фазам двигателя, что приводит к вращению исполнительного двигателя в обратную сторону. После каждой отработки заданного угла ведущей шестерней поворота платформы Кл разрывает связь идущую к ДПР и двигатель останавливается, фиксируя платформу в заданном положении.
Так как исполнительный электродвигатель постоянно работает в режиме пуска и торможения, то необходимо ограничить большие пусковые токи, потребляемые двигателем. Эту функцию выполняют следующие узлы программно-логического контроллера (Фиг. 2): датчик тока ДТ; узел сравнения УС; усилитель рассогласования УР; задающий генератор ЗГ; широтно-импульсный модулятор ШИМ. На основе анализа параметров и характеристик привода поворотной платформы экскаватора как объекта управления выделены пять основных контуров регулирования и контроля обеспечивающие рекуперацию энергии: 1 контур - регулирует крутящий момент на валу гидродвигателя за счет изменения крутящего момента на валу двигателя постоянного тока; 2 контур - регулирует угловое ускорение поворотной платформы экскаватора при разгоне за счет изменения крутящего момента на валу двигателя постоянного тока (перераспределение сил и моментов, адаптация привода к динамической нагрузки); 3 контур - регулирует угловое ускорение поворотной платформы экскаватора при торможении за счет изменения крутящего момента на валу двигателя постоянного тока (перераспределение сил и моментов, преобразование и рекуперация энергии, адаптация привода к динамической нагрузке); 4 контур - регулирует угловую скорость поворотной платформы экскаватора в период движения между разгоном и торможением за счет изменения крутящего момента на валу двигателя постоянного тока (выравнивание амплитуды ускорений, адаптация привода к динамической нагрузки); 5 контур - контролирует состояние предохранительного перепускного клапана.
Рекуперация энергии элементов гидропривода поворота платформы экскаватора по предлагаемому способу преобразования энергии, перераспределения сил и моментов, а также изменению крутящего момента на валу электрорекуператора позволяет:
1. Преобразовать гидравлическую энергию в электрическую;
2. Частично использовать «потерянную на сопротивлениях» энергию потока рабочей жидкости;
3. Адаптировать привод к резко меняющимся значениям сил и моментов инерции;
4. Обеспечить плавность амплитуды переходных режимов;
5. Аккумулировать преобразованную энергию;
6. Перераспределять силы и моменты по контактным поверхностям приводных механизмов;
7. Увеличить рабочий ресурс;
8. Улучшить показатели энергоэффективности гидропривода;
9. Возможность автоматизации процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕКУПЕРАЦИИ ЭНЕРГИИ | 2018 |
|
RU2688130C1 |
| Гидропривод одноковшового экскаватора с рекуперацией энергии | 1986 |
|
SU1382920A1 |
| Полноповоротный одноковшовый гидравлический экскаватор | 1988 |
|
SU1557268A1 |
| ГИДРОПРИВОД ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1991 |
|
RU2019649C1 |
| ГИДРОПРИВОД одноковшового ЭКСКАВАТОРА | 1971 |
|
SU307165A1 |
| АВИАЦИОННЫЙ ПОДВИЖНЫЙ ЭЛЕКТРОАГРЕГАТ | 2024 |
|
RU2826191C1 |
| Гидропривод поворота платформы экскаватора | 1988 |
|
SU1544899A1 |
| Гидропривод землеройной машины | 1982 |
|
SU1076552A1 |
| Лебедка с трансформатором крутящего момента | 2023 |
|
RU2819462C1 |
| Гидропривод поворота платформы экскаватора | 1983 |
|
SU1134680A1 |

Изобретение относится к области энергосбережения и предназначено для рекуперации энергии элементов гидропривода поворотной платформы одноковшовых экскаваторов. В способе программно-логический контроллер через систему датчиков считывает нарастание пиковых значений динамических нагрузок - крутящего момента, угла поворота, углового ускорения и при отклонении от заданных значений крутящего момента включает в работу электрорекуператор. При превышении критических значений динамической нагрузки электрорекуператор притормаживает платформу и работает как генератор, преобразовывая механическую и гидравлическую энергию в электрическую, аккумулируя часть энергии в аккумуляторе, а часть, перенаправляя в бортовую сеть. При работе электрорекуператора гидравлическая система функционирует на пониженном давлении с меньшими мощностями насоса и гидромотора, регулирование динамических и скоростных характеристик осуществляется электрорекуператором путем изменения крутящего момента на валу приводной шестерни. В процессе работы электрорекуператора исполнительные механизмы привода синхронно перераспределяют силовую нагрузку по контактным поверхностям кинематических пар, обеспечивая снижение концентрации внутренних напряжений на ограниченной площади контакта в единицу времени работы. Технический результат – снижение потерь энергии. 3 ил.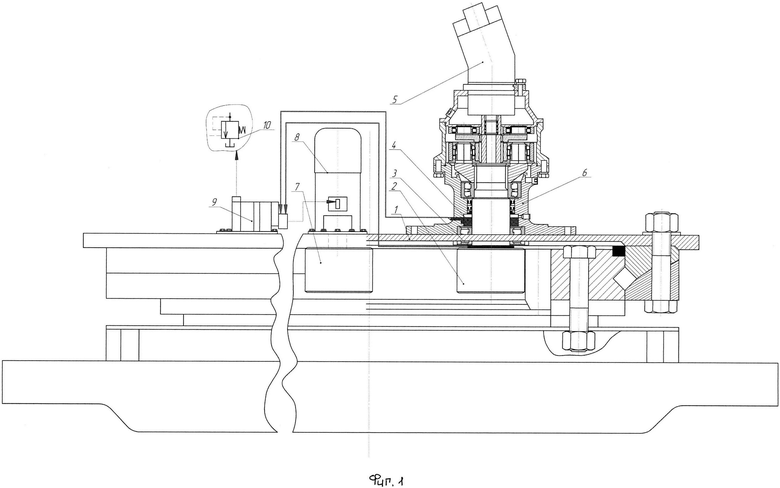
Способ рекуперации энергии гидропривода поворотной платформы экскаватора, при котором выполняют перераспределение динамической нагрузки по контактным поверхностям исполнительных механизмов и рекуперируют энергию потока рабочей жидкости с дифференцированием скоростных режимов эксплуатации, через программно-логический контроллер, отличающийся тем, что система датчиков считывает значения динамических нагрузок и передает контрольно-измерительный сигнал на программно-логический контроллер, который включает электрорекуператор: либо в режим генератора, накапливая электроэнергию на отдельном аккумуляторе за счет торможения поворотной платформы, либо в режим электродвигателя, расходуя накопленную на отдельном аккумуляторе электроэнергию за счет ускорения платформы, посредством рабочего органа перераспределения динамической нагрузки по элементам привода поворотной платформы экскаватора по заданным режимам эксплуатации.
| МОТОРНО-ТРАНСМИССИОННАЯ УСТАНОВКА РАБОЧЕЙ МАШИНЫ | 2014 |
|
RU2558416C1 |
| ЭНЕРГОСБЕРЕГАЮЩИЙ СПОСОБ РЕГУЛИРОВАНИЯ РАСХОДА ЖИДКОСТИ В ГИДРОСИСТЕМАХ И ГИДРОСИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2244173C1 |
| ПРИВОД ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 2010 |
|
RU2533472C2 |
| CN 102691682 A, 26.09.2012 | |||
| US 4819429 A, 11.04.1989 . | |||

