Изобретение относится к области железнодорожного транспорта, а именно к автоматизированным системам закрепления железнодорожного подвижного состава на станционных приемоотправочных путях, и может использоваться для автоматизации процессов, связанных с остановкой и закреплением остановленного на приемоотправочных станционных путях подвижного состава во избежание его самопроизвольного движения после отцепки локомотива.
Заявляемая автоматизированная система закрепления железнодорожного подвижного состава предназначена для автоматизации процессов остановки и закрепления подвижного состава на приемоотправочных путях станций, оснащенных стационарными механизированными устройствами закрепления с электрическим, пневматическим или гидравлическим приводом, то есть для остановки поезда и дистанционного управления механизированными устройствами закрепления подвижного состава.
Известна автоматизированная система управления устройствами закрепления поезда, содержащая подсистему связи с маневровой колонкой и пультом управления, расположенным у дежурного по станции, где в систему включены подсистема управления устройствами закрепления, подсистема прицельной остановки поезда, снабженная пунктом определения колесной пары и пунктами определения длины состава, путевыми ретрансляторами сигналов и устройствами отображения, устройства электрической централизации и цепи увязки с ними, подсистема электропитания, связанные с пультом управления через, по меньшей мере, один единый контроллер, при этом подсистема связи дополнительно снабжена диагностическим устройством отображения, а пункт определения колесной пары и пункт определения длины состава содержат пункты счета осей. При этом расчет длины принимаемого поезда производится на основе определения межосевых расстояний [1]. Данная система выбрана за прототип.
Недостатками прототипа являются недостаточная надежность работы, значительное количество оборудования и большие временные затраты для остановки и закрепления поезда.
Определение закрепляемой колесной пары непосредственно в зоне устройств закрепления средствами четырех пунктов счета осей, расположенных в пункте определения колесной пары, с учетом только длины поезда приводит к недостаточной надежности и точности выполнения операции автоматизированной остановки поезда и, как следствие, к необходимости выполнения трудоемких операций по коррекции положения поезда с привлечением сигналиста. Поскольку в прототипе не предусмотрены средства для предварительного определения расстояния от головы поезда (от первой колесной пары поезда) до закрепляемой колесной пары, это приводит к необходимости движения поезда по станционным путям с минимальной скоростью на большом расстоянии и резкой остановке поезда, когда определяемая колесная пара входит в зону устройств закрепления. Это увеличивает трудоемкость и время выполнения операций по остановке и закреплению поезда. А при наличии в середине и/или в конце состава дополнительных локомотивов [2] закрепление поезда без корректирующих команд сигналиста или помощника машиниста становится невозможным.
Кроме того, в прототипе не раскрыты способ (алгоритм) выделения закрепляемой колесной пары в пункте определения колесной пары при помощи четырех пунктов счета осей и способ определения расстояния до остановки поезда на основе рассчитываемой длины поезда. Предположительно, для этого используется информация от устройств электрической централизации, связанная с эксплуатацией изолирующих стыков рельсовых цепей, которые являются одним из самых ненадежных элементов средств СЦБ.
Техническим результатом, на который направлено заявляемое изобретение, является упрощение системы, повышение надежности ее работы, расширение функциональных возможностей и повышение уровня автоматизации. Предлагаемая система предназначена для автоматизированного закрепления поездов даже при наличии в середине и/или в конце состава дополнительных локомотивов.
Технический результат достигается тем, что автоматизированная система закрепления железнодорожного подвижного состава содержит устройства закрепления подвижного состава, подсистему управления устройствами закрепления, связанную с маневровой колонкой, с устройствами закрепления и, по меньшей мере, одним контроллером, который связан кроме этого с пультом управления, расположенным у дежурного по станции, а также соответствующими цепями увязки с устройствами электрической централизации, устройствами отображения диагностической информации и подсистемой прицельной остановки поезда, снабженной пунктами счета осей и устройствами передачи данных на локомотив, согласно изобретению в подсистему прицельной остановки поезда дополнительно включены подключенные к соответствующим входам контроллера средства для идентификации типов подвижных единиц, пункт фиксации момента входа поезда в зону прицельной остановки, пункт регистрации колеса в зоне закрепления и средства дистанционного контроля положения закрепляемой колёсной пары в зоне устройств закрепления, при этом в память контроллера внесена база данных подвижных железнодорожных единиц с указанием для каждой подвижной единицы, по меньшей мере, принадлежности к вагону или локомотиву, количества колесных пар подвижной единицы и ее межосевых расстояний.
Средства для идентификации типов подвижных единиц поезда содержат рельсовую цепь наложения и, по меньшей мере, два датчика регистрации прохода колеса, при этом датчики регистрации прохода колеса расположены друг от друга на расстоянии меньшем минимально возможного расстояния между двумя колесными парами всех существующих подвижных железнодорожных единиц.
Пункт фиксации момента входа поезда в зону прицельной остановки содержит, по меньшей мере, один датчик регистрации прохода колеса или любое другое устройство для этих же целей.
Пункт фиксации момента входа поезда в зону прицельной остановки содержит датчик регистрации прохода колеса или пункт счета осей или изоляционный стык рельсовой цепи, ограничивающие границы станции или станционного пути, на которые принимается закрепляемый подвижной состав.
Пункт регистрации колеса в зоне закрепления содержит, по меньшей мере, два датчика регистрации прохода колеса.
Устройства передачи данных на локомотив содержат путевые устройства системы автоматического управления тормозами.
Устройства передачи данных на локомотив выполнены в виде устройств отображения, установленных вдоль каждого станционного пути с механизированными устройствами закрепления.
Устройства передачи данных на локомотив содержат радиоканал, связанный с контроллером и бортовым устройством отображения в кабине локомотива для передачи информации машинисту о расстоянии закрепляемой оси поезда до устройств закрепления.
Устройства передачи данных на локомотив содержат радиоканал, связанный с контроллером и с локомотивными устройствами обеспечения безопасности движения.
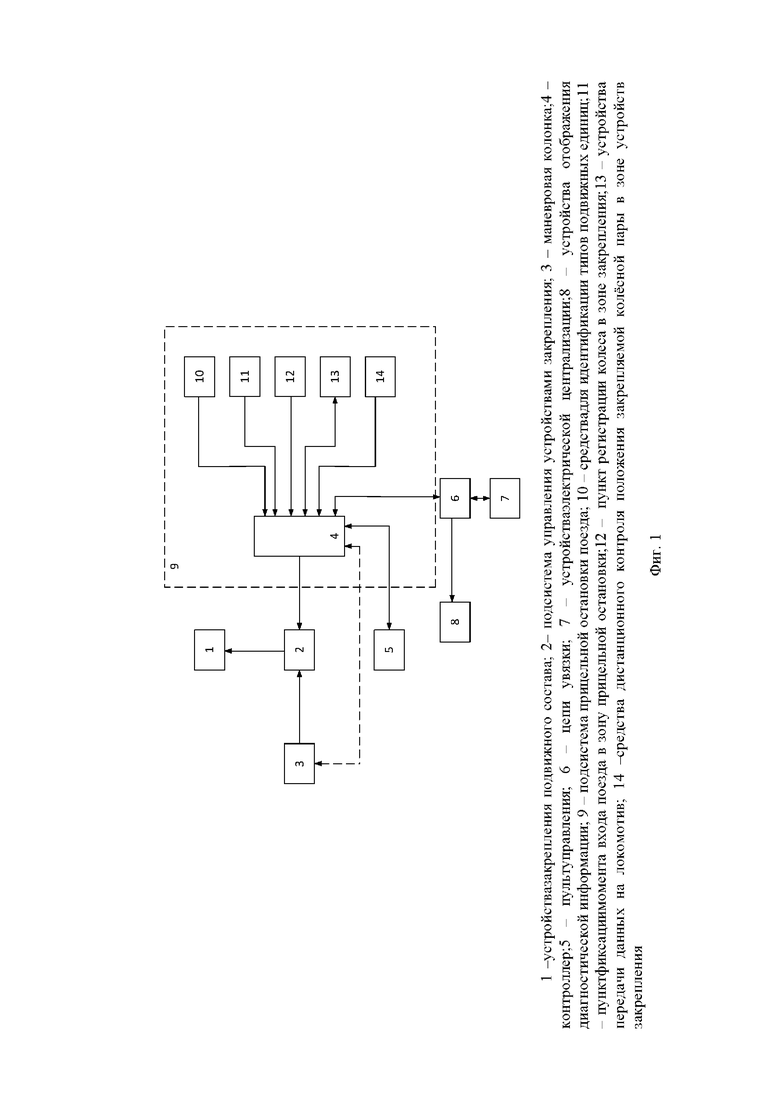
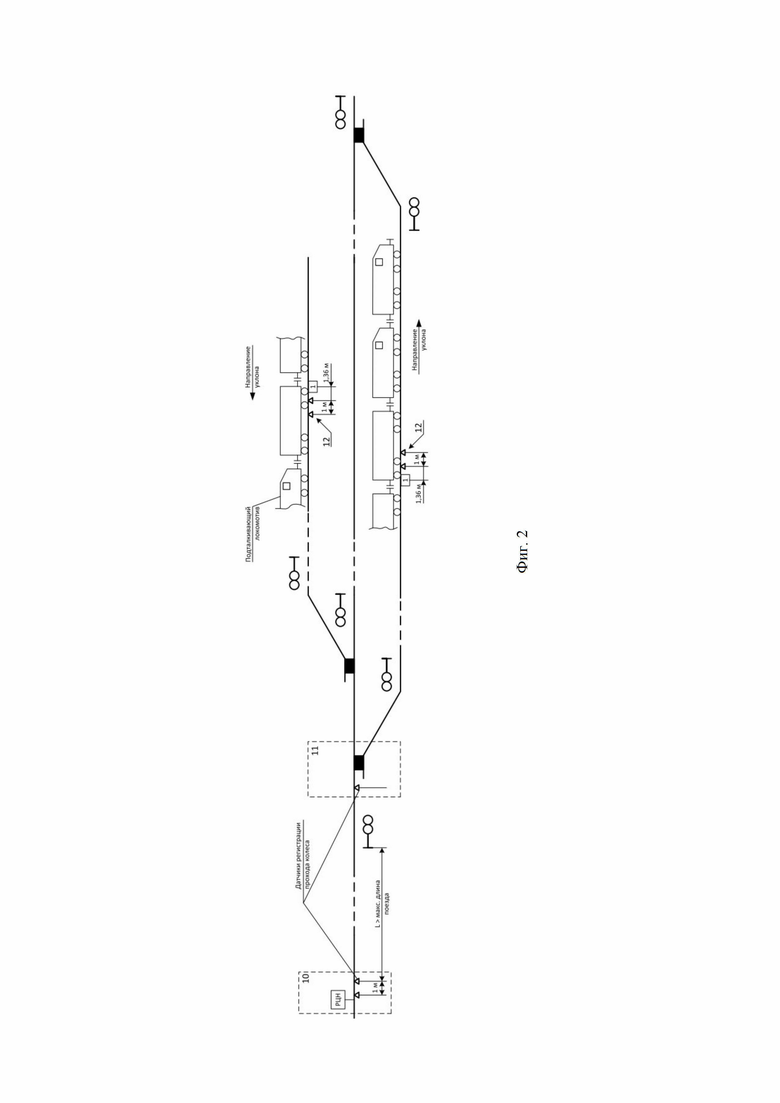
Заявляемое изобретение поясняется чертежами, где на фиг. 1 представлена структурная схема автоматизированной системы закрепления железнодорожного подвижного состава, а на фиг. 2 - предпочтительный вариант размещения оборудования автоматизированной системы закрепления железнодорожного подвижного состава.
Автоматизированная система закрепления железнодорожного подвижного состава содержит устройства 1 закрепления подвижного состава, подсистему 2 управления устройствами закрепления, маневровую колонку 3, расположенную в прямой видимости от устройств 1 закрепления и контроллер 4, связанный с пультом 5 управления автоматизированной системой закрепления железнодорожного подвижного состава, с подсистемой 2 и маневровой колонкой 3. Контроллер 4 связан также соответствующими цепями 6 увязки с устройствами 7 электрической централизации, системой питания (на чертеже не показана), устройством 8 отображения диагностической информации и соответствующими средствами связи (на чертеже не показаны) со всеми устройствами подсистемы 9 прицельной остановки поезда, которая включает: средства 10 для идентификации типов подвижных единиц, пункт 11 фиксации момента входа поезда в зону прицельной остановки, пункт 12 регистрации колеса в зоне закрепления, устройства 13 передачи данных на локомотив и средства 14 дистанционного контроля положения закрепляемой колёсной пары в зоне устройств закрепления.
Подсистема 2 управления устройствами закрепления состава предназначена для управления приводами устройств 1 закрепления и выполнения следующих функций:
- перевод устройств 1 закрепления в верхнее или нижнее положение при получении соответствующей команды от контроллера 4;
- выключение питания приводов устройств 1 закрепления при подаче дежурным по станции (ДСП) команды на аварийное отключение;
- контроль верхнего и нижнего положений устройств 1 закрепления и передача соответствующей информации на контроллер 4.
Маневровая колонка 3 (фиг. 1) предназначена для обеспечения возможности управления устройствами автоматизированной системы управления непосредственно в месте закрепления состава.
На лицевой панели маневровой колонки 3 размещены (на фигурах не показаны):
- переключатель закрепления/раскрепления состава;
- кнопка аварийной остановки;
- устройство блокировки возможности работы с пульта местного управления (электрозащелка ключа местного управления).
Контроллер 4 предназначен для сбора необходимой информации, её обработки и выдачи соответствующих команд, связанных с прицельной остановкой поезда и с закреплением/раскреплением состава.
Пульт 5 управления предназначен для возможности отображения дежурному по станции всей необходимой информации, связанной с остановкой и закреплением состава поезда (для отображения текущего состояния устройств закрепления подвижного состава, информации отображаемой на путевых устройствах отображения, положения закрепляемого колеса относительно устройств закрепления и др.) и для обеспечения возможности выдачи соответствующих управляющих команд через контроллер 4 в подсистему 2 для управления устройствами закрепления подвижного состава. Он выполнен с возможностью выведения на его основной или установленный дополнительно экран визуальной информации и/или на лицевую панель световой или звуковой сигнализации. При условии остановки состава и нахождении целевой колесной пары в зоне устройств 1 закрепления, контроллер 4 формирует команду на включение на лицевой панели пульта 5 управления соответствующей световой и/или звуковой сигнализации о готовности устройств системы управления устройствами закрепления железнодорожного подвижного состава и самого состава к закреплению поезда. Пульт 5 управления установлен на рабочем месте дежурного по станции.
Устройство 8 отображения диагностической информации предназначено для возможности отображения обслуживающему персоналу диагностической информации о текущем техническом состоянии устройств автоматизированной системы закрепления железнодорожного подвижного состава, а также архивирования и протоколирования указанной информации с возможностью ее последующей передачи устройствам удаленной диагностики и мониторинга и установлено на посту ДСП.
Подсистема 9 прицельной остановки поезда предназначена для обеспечения машиниста поезда и/или локомотивных устройств безопасности (или системы автоведения поезда) данными, в соответствии с которыми машинист и/или локомотивные устройства безопасности (или система автоведения поезда), если остановка поезда производится в автоматическом режиме, могут осуществить торможение и остановку поезда таким образом, чтобы колесная пара, посредством которой производится закрепление состава поезда на станционном пути (целевая колесная пара), оказалась в зоне действия устройств закрепления подвижного состава.
Средства 10 для идентификации типов подвижных единиц предназначены для снабжения контроллера 4 данными, необходимыми для идентификации типов подвижных единиц, и содержат рельсовую цепь наложения (РЦН) и, по меньшей мере, два датчика регистрации прохода колеса, подключенные к контроллеру 4 непосредственно или соответствующими средствами для передачи информации (на фиг. не показаны). При этом датчики регистрации прохода колеса расположены в зоне действия РЦН (вблизи точки её подключения к рельсам) и друг от друга на расстоянии меньшем минимально возможного расстояния двух колесных пар всех существующих подвижных железнодорожных единиц. Предпочтительно их устанавливать от пункта 11 фиксации момента входа поезда в зону прицельной остановки на расстоянии не менее максимально возможной длины поездов, принимаемых на данной станции.
Пункт 11 фиксации момента входа поезда в зону прицельной остановки содержит, по меньшей мере, один датчик регистрации прохода колеса или любое другое устройство для этих же целей. В качестве пункта 11 для фиксации момента входа поезда в зону прицельной остановки может использоваться сигнал от соответствующего счетного пункта (датчика колеса) или сигнал занятости стыковой рельсовой цепи, ограничивающих границы станции или станционного пути, на которые принимается закрепляемый подвижной состав. С целью экономии оборудования предпочтительно пункт 11 разместить в горловине станции после входного светофора до первой входной стрелки станции (или использовать сигналы от соответствующих ограждающих устройств, поступающие в устройства электрической централизации).
Пункт 12 регистрации наличия колеса в зоне закрепления предназначен для фиксации момента входа целевой колесной пары в зону действия устройств 1 закрепления подвижного состава и содержит, по меньшей мере, два датчика регистрации прохода колеса, подключенных к контроллеру 4, расположенных на небольшом расстоянии друг от друга и на расстоянии 1360 мм (минимально возможное межосевое расстояние в тележках существующего парка вагонов) в сторону уклона пути от устройств 1 закрепления.
Устройства 13 для передачи данных на локомотив предназначены для обеспечения машиниста поезда и/или локомотивных устройств безопасности (или системы автоведения поезда) данными, в соответствии с которыми машинист и/или локомотивные устройства безопасности (или система автоведения поезда), если торможение и остановка поезда производится в автоматическом режиме, могут осуществить торможение и остановку поезда таким образом, чтобы колесная пара, посредством которой будет закрепляться подвижной состав (целевая колесная пара), оказалась в зоне действия устройств 1 закрепления подвижного состава. Устройства 13 для передачи данных на локомотив могут быть снабжены устройствами отображения в соответствии с [1] и/или радиоканалом (радиомодемом) и/или напольными устройствами САУТ для передачи данных в локомотивные устройства безопасности (типа БЛОК, КЛУБ, САУТ или др.) и/или другими средствами передачи информации машинисту и локомотивным устройствам безопасности. Напольные устройства САУТ размещают вдоль станционных путей, где установлены механизированные устройства закрепления на некотором расстоянии друг от друга.
Средства 14 дистанционного (прямого или опосредованного) контроля положения закрепляемой колесной пары в зоне устройств 1 закрепления подвижного состава в соответствии с известными техническими решениями могут быть снабжены, например, видеокамерой [3], расположенной в зоне прямой видимости от устройств закрепления, или дополнительными датчиками присутствия колеса в зоне действия устройств закрепления [4] (на фиг. 1 и 2 не показаны), данные с которых по радиоканалу и/или по кабельной линии передаются в контроллер 4 по соответствующим цепям связи, и затем на пост ДСП и/или на локомотив (отображаются на пульте 5 управления ДСП и/или на специальном экране в кабине локомотива поезда). Дополнительные датчики присутствия колеса могут представлять собой типовые датчики регистрации прохода колеса, которые подключены к контроллеру 4 и расположены с разных сторон на небольшом расстоянии друг от друга и от двух датчиков колеса, расположенных в пункте 12 регистрации колеса в зоне закрепления. На пульте 5 управления ДСП и/или в кабине локомотива поезда на специальном дополнительном или основном экране должна отражаться непосредственная визуальная картина расположения закрепляемой колёсной пары относительно устройств 1 закрепления или информация в любом мнемоническом виде о расположении целевой колесной пары относительно устройств закрепления и относительно датчиков колеса, расположенных в пункте 12, и дополнительных датчиков присутствия колеса в зоне действия устройств закрепления.
Автоматизированная система закрепления железнодорожного подвижного состава работает следующим образом.
В алгоритме работы контроллера 4 принято, что колесная пара, за которую должно проводиться закрепление подвижного состава (целевая колесная пара), - это наиболее удаленная от нижней точки уклона колесная пара первого (по счету со стороны нижней точки уклона) вагона поезда. В том числе при наличии в конце или в середине поезда дополнительных действующих локомотивов.
Для приема поезда на станцию для его закрепления ДСП установленным порядком задает маршрут приема поезда на соответствующий путь и предупреждает машиниста прибывающего поезда о том, что путь приема оборудован устройствами автоматизированного управления устройствами закрепления. Также ДСП сообщает машинисту о возможности торможения и остановки поезда в автоматическом режиме, если станционные пути оборудованы, например, напольными устройствам САУТ или другими радиотехническими устройствами 13 для передачи данных в локомотивные устройства безопасности (БЛОК, КЛУБ, САУТ или др.) или какую-либо другую систему автоведения поезда. После замыкания маршрута контактами реле контроля замыкания пути в поездном маршруте в контроллер 4 передается управляющая команда на активацию РЦН и датчиков колеса, расположенных в средствах 10 для идентификации типов подвижных единиц поезда, активацию датчика колеса (или других средств) в пункте 11 фиксации момента входа поезда в зону прицельной остановки и активацию датчиков регистрации прохода колеса (пунктов счета осей), расположенных в пункте 12 регистрации наличия колеса в зоне закрепления станционного пути, на который принимается поезд. Одновременно активируются устройства 13 для передачи данных на локомотив, соответствующие станционному пути, на который принимается поезд, и запускается алгоритм приема поезда.
РЦН вырабатывает сигнал занятости РЦ при приближении к ней поезда на расстояние 10-15 м и снимает этот сигнал при удалении поезда от зоны размещения РЦН на расстояние 30-40 м. При заходе поезда на рельсовую цепь наложения сигнал занятости РЦН поступает в контроллер 4 и запускает алгоритм обработки сигналов, поступающих от датчиков регистрации прохода колеса, расположенных в средствах 10. В соответствии с известными техническими решениями [5, 6, 7], в контроллере 4 по сигналам, поступающим от этих датчиков, с использованием сигнала частоты собственного генератора контроллера в контроллере 4 проводится расчет и накопление всех межосевых расстояний поезда. По мере накопления посчитанных осей и их межосевых расстояний каждый раз, начиная с первой и второй оси от головы поезда, проводится сравнение накопленных данных с данными о подвижных железнодорожных единицах, которые хранятся в базе данных памяти контроллера 4. При первом совпадении накопленных данных с данными в памяти контроллера осуществляется идентификация соответствующей подвижной единицы поезда (локомотив это или вагон), присваивается ей очередной порядковый номер, и затем вся процедура повторяется. Происходит очередное накопление следующих осей очередной подвижной единицы и их межосевых расстояний, сравнение накопленных данных с данными, хранимыми в памяти контроллера, и при совпадении - идентификация следующей подвижной единицы поезда. Данная процедура продолжается до тех пор, пока сигнал занятости РЦН, поступающий в контроллер 4, не станет равным нулю. Таким образом, по мере продвижения поезда к входному светофору, в контроллере в режиме реального времени формируется информационная модель принимаемого на станцию поезда с обозначением от головы поезда порядкового номера и типа соответствующей подвижной единицы (локомотив это или вагон), количества её колесных пар и межосевых расстояний в составе каждой подвижной единицы и в составе поезда. Одновременно в контроллере с учетом уклона пути, на который принимается поезд, определяется порядковый номер N целевой колесной пары относительно первой колесной пары поезда и определяется расстояние от первой колесной пары поезда до целевой колесной пары.
При проходе первой колесной парой принимаемого поезда датчика регистрации прохода колеса, расположенного в пункте 11 фиксации момента входа поезда в зону прицельной остановки, т. е. при вступлении поезда в зону прицельной остановки, контроллер 4 определяет расстояние от целевой колесной пары до устройств закрепления и посредством устройств 13 передает эти данные на локомотив машинисту и/или в устройства безопасности БЛОК, КЛУБ, САУТ, устройства автоведения поезда или др. При проходе этого же датчика последующими колесными парами поезда контроллер 4 в режиме реального времени уточняет это расстояние и посредством устройств 13 передает эти данные на локомотив. Руководствуясь этими данными, машинист осуществляет торможение и остановку поезда в ручном режиме, а локомотивные устройства безопасности или соответствующие устройства САУТ или автоведения поезда могут осуществить торможение и остановку поезда в автоматическом режиме в соответствии с фактической скоростью движения поезда и кривыми торможения, которые занесены в локомотивные устройства безопасности.
Известно [7], что межосевые расстояния, вычисляемые по сигналам от датчиков регистрации колеса, делятся на две группы.
К первой группе относятся межосевые расстояния, величина которых не зависит от величины ускорений при движении поезда, и от того, сжат в данный момент поезд или растянут. Это расстояния между осями в пределах каждой подвижной единицы.
Ко второй группе относятся расстояния, которые зависят от величины ускорений при движении поезда, и/или от того, сжат в данный момент поезд или растянут. Это расстояния между ближайшими осями колес соседних подвижных единиц поезда. Это расстояние образуется навесными частями сцепляемых подвижных единиц и автосцепкой, содержащей поглощающий аппарат для демпфирования ударных нагрузок при тяговых и тормозных усилиях. Из-за наличия демпфирующих элементов (пружинных, фрикционных, резинометаллических) в поглощающем аппарате автосцепки межосевое расстояние между крайними колесными парами в подвижных единицах поезда при торможении или сжатии поезда уменьшается, а при разгоне или растяжении поезда это расстояние – увеличивается. Например, у широко распространенных поглощающих аппаратов Ш-1-ТМ, Ш-2-В, Ш-2-Т, использующих пружинно-фрикционный принцип работы, величина хода при торможении и разгоне (тяге) составляет 75 мм, а для поглощающих аппаратов восьмиосных вагонов величина хода составляет до 110 мм. Поэтому определение расстояния от оси первой колесной пары поезда до оси целевой колесной пары с учетом только общей длины поезда, как в прототипе, имеет недостаточную (ограниченную) точность, которая ухудшается с увеличением числа подвижных единиц от головы поезда до закрепляемого вагона. В конечном счете, это может привести к тому, что при остановке локомотива по показаниям устройств отображения устройств 13 закрепляемая (целевая) колесная пара может оказаться вне зоны действия устройств закрепления.
Для устранения этого недостатка в предлагаемом изобретении при вступлении второй колесной пары принимаемого поезда на первый датчик регистрации прохода колеса, расположенный в пункте 12, контроллер 4 начинает определять расстояние от целевой колесной пары до устройств закрепления в режиме реального времени по данным датчиков регистрации прохода колеса, расположенным в пункте 12, с учетом реального текущего времени, момента (или времени) прохождения предшествующей последней учтенной колесной парой этих датчиков, скорости и ускорения при прохождении последней учтенной колесной парой этих датчиков. Расстояние от целевой колесной пары до устройств 1 закрепления, определённое таким способом, по мере уменьшения количества колесных пар от устройств закрепления до целевой колесной пары каждый раз уточняется (и, таким образом, при прохождении последней колесной пары, предшествующей закрепляемой колесной паре, может иметь точность до нескольких сантиметров). С заранее заданной периодичностью это расстояние обновляется контроллером 4 на устройствах отображения устройств 13, даже если очередная колесная пара ещё не достигла этих датчиков. Машинист в соответствии с этими данными производит торможение и остановку поезда. Одновременно в контроллере 4 в режиме реального времени проводится сравнение количества прошедших колесных пар над первым и вторым датчиками регистрации прохода колеса, расположенными в пункте 12 с порядковым номером N целевой колесной пары относительно первой колесной пары поезда. Когда количество прошедших колесных пар над этими датчиками станет соответствовать значениям N и N + 1, либо N¬2 и N¬1 (в зависимости от направления движения поезда), контроллер 4 на устройства отображения устройств 13 выводит значение информации «000». Это соответствует расположению целевой колесной пары в зоне устройств закрепления колеса, а колесной пары, предшествующей целевой колесной паре, - между первым и вторым датчиками регистрации прохода колеса, расположенными в пункте 12. При этом контроллер 4 формирует команду на включение соответствующей индикации на пульте 5 управления ДСП о готовности системы к закреплению поезда.
После остановки поезда при наличии индикации или звукового сигнала о готовности системы к закреплению подвижного состава, ДСП, убедившись по показаниям устройства 8 отображения диагностической информации об исправности и готовности устройств 1 к закреплению, дает команду на приведение в действие устройств закрепления подвижного состава путем перевода соответствующего переключателя в положение “Закрепление состава”.
В случае остановки поезда и отсутствия на панели пульта 5 управления светового (и/или звукового) сигнала о готовности системы к закреплению подвижного состава, то есть в случае неточной остановки поезда, ДСП средствами 14 дистанционного (прямого или опосредованного) контроля положения закрепляемой колесной пары в зоне устройств 1 закрепления, контролирует наличие и фактическое расположение целевой колесной пары относительно устройств 1 закрепления состава и относительно дополнительных датчиков присутствия колеса, если таковые в системе установлены. Оценивает оптимальность расположения целевой колесной пары относительно устройств 1 закрепления состава, если она обнаружена. В случае не обнаружения целевой колесной пары в зоне устройств 1 закрепления по данным средств 14, то есть в зоне прямой видимости, или в зоне дополнительных датчиков присутствия колеса (устройств опосредованного контроля), ДСП выводит на экран пульта 5 ДСП вычисленные данные контроллера 4 о фактическом расстоянии целевой колесной пары до устройств закрепления состава. Последний случай возможен, если торможение и остановку состава поезда осуществлять в автоматическом режиме средствами систем обеспечения безопасности движения БЛОК, КЛУБ, САУТ, устройствами автоведения поезда или др., а также в результате ошибочных действий машиниста.
Руководствуясь этими данными, ДСП осуществляет передачу локомотивной бригаде закрепляемого поезда приказа, требующего произвести коррекцию текущей позиции остановившегося поезда с указанием направления движения и расстояния (подтягивания или осаждения поезда) в процессе коррекции.
После остановки и закрепления подвижного состава ДСП отдает приказ локомотивной бригаде на выполнение операций по отцепке локомотива (локомотивов) от закрепленной части состава и на выполнение маневровых работ в соответствии с техническо–распорядительным актом (ТРА) данной конкретной станции. При отцепке дополнительного локомотива (локомотивов) с подвижными единицами оставшейся части подвижного состава их перемещение на свободный станционный путь, в том числе и с механизированными средствами закрепления, и последующее закрепление оставшейся части состава осуществляются в аналогичном порядке, с учетом имеющейся в контроллере 4 модели оставшейся части принимаемого поезда.
При проведении технического обслуживания или при аварийных ситуациях управление устройствами 1 закрепления подвижного состава в соответствии с известными техническими решениями [1] передается на маневровую колонку 3. Контроллер 4 осуществляет передачу устройствам 7 электрической или микропроцессорной централизации данные о текущем положении (верхнее, нижнее или промежуточное) устройств 1 закрепления подвижного состава всех оборудованных данными устройствами станционных путей, а также данные о том, на каких приемоотправочных путях тормозные упоры переданы на местное управление.
В прототипе для оборудования какой-либо станций автоматизированной системой закрепления подвижного состава на каждом станционном пути, оборудованном устройствами закрепления, согласно описанию (стр. 7, строки 1-8) требуется 10 пунктов счета осей (датчиков регистрации прохода колеса), подключенных к контроллеру. Предлагаемая автоматизированная система закрепления железнодорожного подвижного состава требует по два датчика регистрации прохода колеса на каждом станционном пути и на каждом входном пути станции по одной РЦН и по два датчика регистрации прохода колеса, подключенных к контроллеру. При этом в качестве некоторой точки отсчета нет необходимости использовать ненадежный изоляционный стык рельсовых цепей.
В целом предлагаемая автоматизированная система закрепления железнодорожного подвижного состава требует меньше оборудования и не использует изоляционные стыки рельсовых цепей, а, следовательно, и надежность её работы будет выше. Причем, предлагаемая система обеспечивает остановку поезда с большей точностью за более короткое время, в том числе, потенциально, и в автоматическом режиме.
Таким образом, предлагаемая система автоматизированного закрепления железнодорожного подвижного состава проще и надежнее, чем в прототипе. А функциональные возможности её применения шире, чем в прототипе, поскольку предлагаемая система закрепления подвижного состава может использоваться для автоматизации процессов остановки и закрепления подвижных составов с локомотивами в начале, в середине и в конце состава.
Хотя изобретение подробно пояснено с помощью предпочтительных вариантов выполнения, изобретение не ограничивается раскрытыми примерами, и специалистами в данной области техники могут быть выведены другие варианты выполнения, без выхода за объем защиты изобретения.
Литература
1. Патент RU 2598919, Российская Федерация, МПК B61L 7/00. Устройство идентификации единиц подвижного состава. [Текст] / С.М. Куликов, В.Б. Свердлов, С.Г. Акмалов и др.; заявитель ОАО "Российские железные дороги"; заявл. 15.05.2015; опубл. 10.10.2016, Бюл. № 28.
2. Формирование поездов повышенной массы и длины. [Электронный ресурс]. https://helpiks.org/8-22470.html (дата обращения 17.10.2018).
3. Патент RU 2399534, Российская Федерация, МПК B61L 5/00, B61L 7/00. Устройство дистанционного контроля и управления стационарным тормозным упором для закрепления состава. [Текст] / А.Г. Савицкий, А.В. Николаев, И.П. Старшов и др.; заявитель ОАО "Российские железные дороги"; заявл. 22.07.2009; опубл. 20.09.2010, Бюл. № 26.
4. Рыжов, С.Н. Вопросы применения индуктивных датчиков приближения. / С.Н. Рыжов // Обзор ФИЛКУССТ. – Февраль, 2016 [Электронный ресурс]. http://www.sensor.ru/pdf/technocomost/proxy.pdf (дата обращения 22.11.2017). – С. 38 (стр.15, пункт 4) индуктивные системы измерения движения. (доп. датчики положения)
5. Устройство автоматической идентификации единиц подвижного состава, входящее в состав многофункционального комплекса технических средств (КТСМ) (Швалов Д.В., Шаповалов В.В. Системы диагностики подвижного состава: Учебник для техникумов и колледжей ж.-д. транспорта / Под ред. Д.В. Швалова. - М.: Маршрут, 2005. - 268 с.).
6. Патент RU78159, Российская Федерация, МПК B61L 25/02. Устройство идентификации единиц подвижного состава. [Текст] / М.В. Ромкин; заявитель ГОУ ВПО "Самарский государственный университет путей сообщения" (СамГУПС); заявл. 24.06.2008; опубл. 20.11.2008, Бюл. № 32.
7. Патент RU154205, Российская Федерация, МПК B61L 25/00. Устройство идентификации единиц подвижного состава. [Текст] / М.В. Ромкин, В.А. Засов; заявитель ФГБОУ ВПО "Самарский государственный университет путей сообщения" (СамГУПС); заявл. 06.10.2014; опубл. 20.08.2015, Бюл. № 32.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления устройствами закрепления железнодорожного подвижного состава | 2017 |
|
RU2682519C1 |
| СПОСОБ ПРИЦЕЛЬНОЙ ОСТАНОВКИ ПОЕЗДА НА УЧАСТКЕ ПУТИ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2020 |
|
RU2751589C1 |
| Система для позиционирования железнодорожного подвижного состава при закреплении механизированными устройствами | 2022 |
|
RU2788208C1 |
| Система автоматического закрепления подвижного состава | 2024 |
|
RU2836918C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ УСТРОЙСТВАМИ ЗАКРЕПЛЕНИЯ ПОЕЗДА | 2015 |
|
RU2598919C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ С ПОМОЩЬЮ ЭВМ БЕЗ ОПАСНЫХ ОТКАЗОВ | 2017 |
|
RU2673315C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА, МАНЕВРОВОГО СОСТАВА ИЛИ ОДИНОЧНОГО ЛОКОМОТИВА ПО СТАНЦИИ И НА ПОДХОДАХ К НЕЙ | 2007 |
|
RU2352487C1 |
Изобретение относится к средствам железнодорожной автоматики для закрепления подвижного состава. Система содержит устройства закрепления подвижного состава, подсистему управления устройствами закрепления, связанную с маневровой колонкой, с устройствами закрепления и по меньшей мере одним контроллером, который связан кроме этого с пультом управления, расположенным у дежурного по станции, а также соответствующими цепями увязки с устройствами электрической централизации, устройствами отображения диагностической информации и подсистемой прицельной остановки поезда, снабженной пунктами счета осей и устройствами передачи данных на локомотив. В подсистему прицельной остановки поезда включены подключенные к соответствующим входам контроллера средства для идентификации типов подвижных единиц, пункт фиксации момента входа поезда в зону прицельной остановки, пункт регистрации колеса в зоне закрепления и средства дистанционного контроля положения закрепляемой колёсной пары в зоне устройств закрепления. В память контроллера внесена база данных подвижных железнодорожных единиц с указанием для каждой подвижной единицы, по меньшей мере, принадлежности к вагону или локомотиву, количества колесных пар подвижной единицы и ее межосевых расстояний. Достигается повышение надежности и автоматизации работы. 9 з.п. ф-лы, 2 ил.
1. Автоматизированная система закрепления подвижного состава, содержащая механизированные устройства закрепления подвижного состава, подсистему управления устройствами закрепления, связанную с маневровой колонкой, с устройствами закрепления и по меньшей мере одним контроллером, который связан кроме этого с пультом управления, расположенным у дежурного по станции, маневровой колонкой, а также соответствующими цепями увязки с устройствами электрической централизации, устройствами отображения диагностической информации и подсистемой прицельной остановки поезда, снабженной пунктами счета осей и устройствами передачи данных на локомотив, отличающаяся тем, что в подсистему прицельной остановки поезда дополнительно включены подключенные к соответствующим входам контроллера средства для идентификации типов подвижных единиц, пункт фиксации момента входа поезда в зону прицельной остановки, пункт регистрации колеса в зоне закрепления и средства дистанционного контроля положения закрепляемой колёсной пары в зоне устройств закрепления, при этом в память контроллера внесена база данных подвижных железнодорожных единиц с указанием для каждой подвижной единицы, по меньшей мере, принадлежности к вагону или локомотиву, количества колесных пар подвижной единицы и ее межосевых расстояний.
2. Система по п. 1, отличающаяся тем, что средства для идентификации типов подвижных единиц поезда содержат рельсовую цепь наложения и по меньшей мере два датчика регистрации прохода колеса, при этом датчики регистрации прохода колеса расположены друг от друга на расстоянии меньшем минимально возможного расстояния между двумя колесными парами всех существующих подвижных железнодорожных единиц.
3. Система по п. 1, отличающаяся тем, что пункт фиксации момента входа поезда в зону прицельной остановки содержит по меньшей мере один датчик регистрации прохода колеса.
4. Система по п. 1, отличающаяся тем, что пункт фиксации момента входа поезда в зону прицельной остановки содержит датчик регистрации прохода колеса, или пункт счета осей, или изоляционный стык рельсовой цепи, ограничивающие границы станции или станционного пути, на которые принимается закрепляемый подвижной состав.
5. Система по п. 1, отличающаяся тем, что пункт регистрации колеса в зоне закрепления содержит по меньшей мере, два датчика регистрации прохода колеса.
6. Система по п. 1, отличающаяся тем, что устройства передачи данных на локомотив содержат путевые устройства системы автоматического управления тормозами.
7. Система по п. 1, отличающаяся тем, что устройства передачи данных на локомотив выполнены в виде устройств отображения, установленных вдоль каждого станционного пути с механизированными устройствами закрепления.
8. Система по п. 1, отличающаяся тем, что устройства передачи данных на локомотив содержат радиоканал, связанный с контроллером и бортовым устройством отображения в кабине локомотива для передачи информации машинисту о расстоянии закрепляемой оси поезда до устройств закрепления.
9. Система по п. 1, отличающаяся тем, что устройства передачи данных на локомотив содержат радиоканал, связанный с контроллером и с локомотивными устройствами обеспечения безопасности движения.
10. Система по п. 1, отличающаяся тем, что средства дистанционного контроля положения закрепляемой колесной пары в зоне устройств закрепления подвижного состава снабжены видеокамерой, расположенной в зоне прямой видимости от устройств закрепления, или дополнительными датчиками присутствия колеса в зоне действия устройств закрепления.
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ УСТРОЙСТВАМИ ЗАКРЕПЛЕНИЯ ПОЕЗДА | 2015 |
|
RU2598919C1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМу::.'.:^ | 0 |
|
SU162977A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Система закрепления составов на путях железнодорожной станции | 2016 |
|
RU2618656C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ СТАЦИОНАРНЫМ ТОРМОЗНЫМ УПОРОМ ДЛЯ ЗАКРЕПЛЕНИЯ СОСТАВА | 2009 |
|
RU2399534C1 |
| DE 3043211 A, 01.07.1982. | |||

