Изобретение относится к области железнодорожной автоматики, в частности к устройствам закрепления состава, и предназначено для повышения эффективности и безопасности работы на железнодорожных станциях.
Известно устройство для торможения рельсовых транспортных средств, содержащее башмаки, соединенные между собой шарнирно тягой, перемещающиеся по направляющим балкам, которые уложены параллельно рельсовому пути внутри него, механизм принудительного извлечения башмака колес и механизм вывода тормозных башмаков из укрытия для торможения вагонов (RU 2059224 С1, 01.12.1995). В известном устройстве у башмаков на прилегающей к колесу стороне выполнен паз по профилю гребня колеса, взаимодействующий с гребнем колеса пары, а механизм принудительного извлечения башмака из-под колесной пары выполнен в виде плавных скосов на концах балок по ходу вагонов.
Недостатками данного устройства являются его низкая надежность при закреплении состава, отсутствие средств дистанционного управления закреплением-раскреплением.
Наиболее близким аналогом является известное устройство для закрепления рельсовых транспортных средств с помощью тормозных упоров (SU 1823844 A3, 24.05.1991).
В известном устройстве управление упором при закреплении и раскреплении составов осуществляется сигналистом по указанию дежурного по станции с использованием типовых схем управления стрелочным электроприводом. Схема управления содержит источник питания, пусковое поляризованное реле и пульт управления. На пульте предусмотрена индикация рабочего и нерабочего положений упора, а также индикация потери контроля.
Перед началом перевода в одно из положений сигналист должен визуально убедиться в удалении колесной пары подвижного состава от колодок упора на расстояние, исключающее его повреждение.
Недостатками данного устройства являются необходимость присутствия работника железнодорожного транспорта (сигналиста) на месте закрепления состава, сложность точной установки колес вагонов относительно колодки упора, дополнительные потери времени при закреплении составов.
Задачей изобретения является создание устройства дистанционного контроля и управления стационарным тормозным упором для закрепления составов.
Технический результат заключается в снижении эксплуатационных расходов за счет сокращения времени закрепления-раскрепления состава и высвобождения эксплуатационного персонала от участия в процессе закрепления-раскрепления состава.
Технический результат достигается тем, что устройство контроля и управления стационарным тормозным упором для закрепления состава содержит цепь управления электропривода, шарнирно соединенного с рычажным механизмом стационарного тормозного упора, и модуль контроля и управления, выходом соединенный со светофором и посредством канала связи с напольным контроллером, согласно изобретению на внутренней стороне рельса размещены на заданных расстояниях друг от друга путевые датчики для подсчета количества колесных пар подвижного состава, два из которых закреплены перед колодкой тормозного упора, а третий - за колодкой, датчики выходами соединены с входами модуля контроля и управления, соответствующий выход которого подключен к цепи управления электропривода, при этом входы/выходы напольного контроллера подключены к пульту управления дежурного по станции, блок индикации и монитор которого выполнены с возможностью отображения состояния датчиков.
В устройство может быть введена видеокамера для фиксирования наличия подвижного состава и положения колес вагона на участке пути со стационарным тормозным упором, выходом подключенная к соответствующему входу модуля контроля и управления. Наличие визуальной информации о положении состава на пути закрепления и положении колес вагона относительно тормозного упора позволяет дежурному по станции осуществлять дистанционный контроль за процессом закрепления и раскрепления подвижного состава.
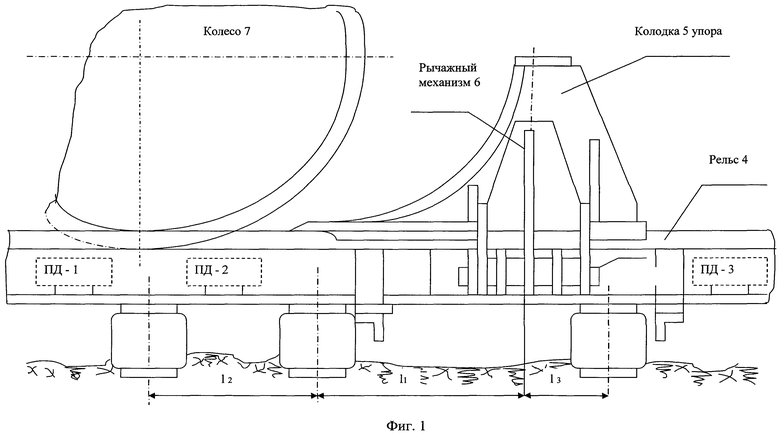
Сущность устройства поясняется чертежами на фиг.1 и фиг.2. На фиг.1 схематично изображена схема расположения путевых датчиков (ПД) при закреплении состава упором, на фиг.2 - структурная схема предлагаемого устройства.
Устройство дистанционного контроля и управления стационарным тормозным упором для закрепления подвижного состава содержит путевые датчики ПД1, ПД2, ПД3, закрепленные на заданных расстояниях l1, l2, l3 на рельсе 4 на заданном расстоянии друг от друга. Датчики ПД1 и ПД2 закреплены перед колодкой 5, а датчик ПД3 - за колодкой тормозного упора. С помощью рычажного механизма 6, шарнирно соединенного с электроприводом (на фиг. не показан), колодка 5 упора устанавливается в рабочее или нерабочее состояние. Позицией 7 обозначено колесо колесной пары.
Устройство включает также видеокамеру 8, расположенную на электроприводе. Путевые датчики ПД1, ПД2, ПД3 и видеокамера 8 подключены к модулю 9 контроля управления (МКУ), один выход которого соединен с цепью 10 управления электроприводом тормозного упора (УТС), другой - со светофором 11, а третий выход соединен через напольный контроллер 12 посредством канала связи 13 с постовой аппаратурой, включающей пульт управления 14 дежурного по станции с блоком 15 индикации и монитором 16.
Устройство работает следующим образом.
При поступлении подвижного состава на путь датчик ПД1 осуществляет подсчет колесных пар локомотива, поступивших на участок закрепления, а датчик ПД3 - колесных пар, покинувших этот участок. При прохождении первой колесной пары вагона сигнал с выхода ПД1 поступает на МКУ 9, который формирует управляющий сигнал для светофора 11. На светофоре 11 загорается красный сигнал. Состав останавливается, при этом первая ось затормаживаемой колесной пары вагона должна размещаться на участке между датчиками ПД1-ПД2 на расстоянии до 500 мм от колодки 5 упора (см. фиг.1). Видеокамера 8 фиксирует наличие состава на пути закрепления и положение колеса вагона относительно упора, а путевые датчики ПД2 и ПД3 подтверждают свободность контролируемого участка от колесной пары. В положении колеса 7 между датчиками ПД1 и ПД2 МКУ 9 по заданию из пульта 14 управления формирует управляющие сигналы для УТС 10, который включает электропривод. При этом колодки 5 упора устанавливаются на рельсы 4, осуществляя, таким образом, закрепление состава. При необходимости накатывания колесной пары на колодку (например, при уклонах более 2,5‰) фиксируется занятость участка ПД-2 и ПД-3.
Информация о состоянии датчиков ПД-1, ПД-2 и ПД-3, о состоянии тормозного упора, а также информация с выхода видеокамеры 8 через напольный контроллер 12 по каналу связи 13 поступает на пульт 14 управления дежурного по станции на его устройство индикации 15 и монитор 16. Наличие дополнительной информации позволяет дежурному по станции контролировать правильность закрепления состава или его раскрепление.
При снятии закрепления состава должен быть свободен участок ПД2-ПД3 от колесной пары, в противном случае необходимо осадить состав на участок ПД1-ПД2. После этого дежурный по станции, руководствуясь показаниями монитора 16 и устройства индикации 15, с помощью пульта управления 14 через канал связи 13, напольный контроллер 12 подает команду на МКУ 9, который формирует управляющие сигналы для УТС 10. С помощью УТС 10 электропривод переводит колодки 5 в нерабочее положение и раскрепляет состав.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система закрепления составов на путях железнодорожной станции | 2016 |
|
RU2618656C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ВАГОНОВ/СОСТАВА ДОМКРАТОВИДНЫМИ ЗАМЕДЛИТЕЛЯМИ | 2021 |
|
RU2761123C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ УСТРОЙСТВАМИ ЗАКРЕПЛЕНИЯ ПОЕЗДА | 2015 |
|
RU2598919C1 |
| Автоматизированная система закрепления железнодорожного подвижного состава | 2019 |
|
RU2706751C1 |
| СИСТЕМА ЗАЩИТЫ ЖЕЛЕЗНОДОРОЖНЫХ ПЕРЕЕЗДОВ | 2021 |
|
RU2782284C1 |
| Система управления устройствами закрепления железнодорожного подвижного состава | 2017 |
|
RU2682519C1 |
| Система контроля и оповещения об угрозе столкновения подвижного состава с запрещенным технологическим объектом | 2020 |
|
RU2735557C1 |
| Тренажерный комплекс оперативного персонала сортировочной горки | 2023 |
|
RU2810931C1 |
| Устройство для управления закрепляющим элементом состава на пути | 1989 |
|
SU1791236A1 |
| БЛОК УДЕРЖАНИЯ СОСТАВА НА СТАНЦИОННОМ ПУТИ | 2015 |
|
RU2578642C1 |
Изобретение относится к области железнодорожной автоматики и предназначено для повышения безопасности движения на железнодорожных станциях. Устройство содержит цепь управления электропривода, шарнирно соединенного с рычажным механизмом стационарного тормозного упора, и модуль контроля и управления, выходом соединенный со светофором и посредством канала связи с напольным контроллером. На внутренней стороне рельса размещены на заданных расстояниях друг от друга путевые датчики для подсчета количества колесных пар подвижного состава, два из которых закреплены перед колодкой тормозного упора, а третий - за колодкой. Выходы датчиков соединены с входами модуля контроля и управления, соответствующий выход которого подключен к цепи управления электропривода. Входы/выходы напольного контроллера подключены к пульту управления дежурного по станции, блок индикации и монитор которого выполнены с возможностью отображения состояния датчиков. Дополнительно устройство может включать видеокамеру, соединенную с соответствующим входом модуля контроля и управления. Технический результат заключается в снижении эксплуатационных расходов за счет сокращения времени закрепления-раскрепления состава и высвобождения эксплуатационного персонала от участия в процессе закрепления-раскрепления состава. 1 з.п. ф-лы, 2 ил.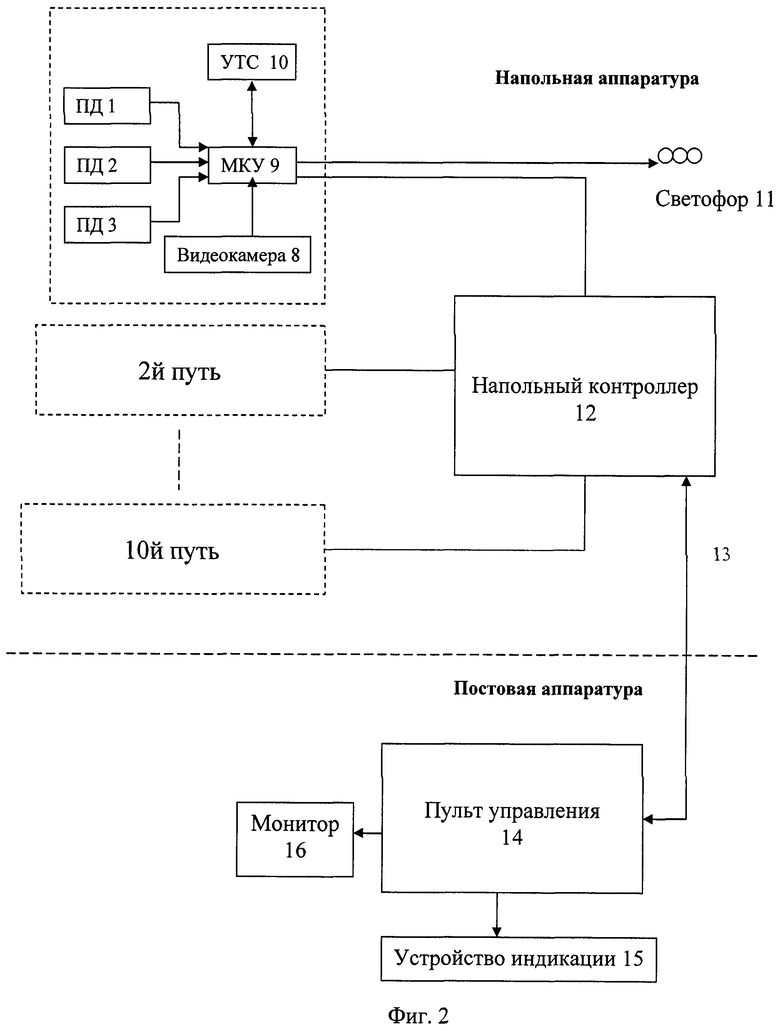
1. Устройство контроля и управления стационарным тормозным упором для закрепления состава, содержащее цепь управления электропривода, шарнирно соединенного с рычажным механизмом стационарного тормозного упора, и модуль контроля и управления, выходом соединенный со светофором и посредством канала связи с напольным контроллером, отличающееся тем, что на внутренней стороне рельса размещены на заданных расстояниях друг от друга путевые датчики для подсчета количества колесных пар подвижного состава, два из которых закреплены перед колодкой тормозного упора, а третий - за колодкой, датчики выходами соединены с входами модуля контроля и управления, соответствующий выход которого подключен к цепи управления электропривода, при этом входы/выходы напольного контроллера подключены к пульту управления дежурного по станции, блок индикации и монитор которого выполнены с возможностью отображения состояния датчиков.
2. Устройство по п.1, отличающееся тем, что в него введена видеокамера для фиксирования наличия и положения колес вагона на участке пути со стационарным тормозным упором, подключенная к соответствующему входу модуля контроля и управления.
| Устройство для закрепления рельсовых транспортных средств | 1991 |
|
SU1823844A3 |
| УСТРОЙСТВО ДЛЯ ЗАКРЕПЛЕНИЯ РЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2049009C1 |
| УПРУГИЙ УПОР ДЛЯ ЗАКРЕПЛЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2000 |
|
RU2207278C2 |
| УСТРОЙСТВО ДЛЯ ТОРМОЖЕНИЯ РЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1995 |
|
RU2099224C1 |
| DE 3043211 A1, 01.07.1982. | |||

