Предлагаемое техническое решение относится к области информационно - измерительной техники и может быть использовано в вычислительном модуле носителей беспилотных летательных аппаратов (БПЛА).
Из уровня техники известен способ определения точки отделения ступеней ракеты, основанный на движении по программной траектории отделяющейся ступени в плоскости пуска, при котором определяют ближайшую и находящуюся на оптимальной дальности от точки старта разрешенные зоны падения отделяющейся ступени ракеты, сравнивают прогнозируемые координаты точки падения отделяющейся ступени с координатами разрешенной зоны падения, оценивают величину остатков топлива в баках отделяющейся ступени ракеты и дают команду на отделение ступени. [1]
Данный способ сложно применять в БПЛА из-за большого размера вычислительного модуля ракеты.
Из уровня техники известен способ определения момента выдачи команды на пуск боеприпаса, при котором осуществляют пуск боеприпаса и направляют боеприпас по программной траектории, рассчитывают скорость боеприпаса, выбирают расстояние до цели, рассчитывают координаты места встречи с целью, выбирают отрезок времени между пуском и подрывом боеприпаса и подрывают боеприпас. [2]
Недостатком данного способа является недостаточная точность в определении момента выдачи команды на пуск боеприпаса.
Наиболее близким к рассматриваемому техническому решению и принятым за прототип является способ определения момента выдачи команды на пуск ракеты с авиационного носителя, при котором используют алгоритмы боевого применения системы управления вооружением.
Алгоритмы обеспечения применения средств вооружения включают в себя: расчет условий разрешения пуска ракеты, формирование логики пуска, расчет полетных заданий и команд, формирование индикации условий применения. В бортовую цифровую вычислительную машину, входящую в состав бортовой автоматизированной системы управления, вводится специальное программное обеспечение, содержащее главную управляющую программу, диспетчеры режимов, функциональное программное обеспечение, программы встроенного контроля. [3]
Недостатком данного способа является невозможность его применения для разных типов носителей.
Задачей предлагаемого изобретения является устранение указанных выше недостатков и создание способа определения условий возможного пуска БПЛА, позволяющего точно определить момент выдачи команды на пуск БПЛА с разных типов носителей.
Поставленная задача решается за счет того, что определение условий возможного пуска БПЛА производят следующим образом: с помощью первого пользовательского интерфейса носителя вводят координаты положения цели, количество и координаты пунктов перемены маршрута, курс стрельбы, угол подхода к цели, угол целеуказания, признак и размер цели, тип топлива, скорость ветра, а также отображают текущие параметры носителя, при этом через равные промежутки времени в вычислительном модуле носителя рассчитывают точку предполагаемого начала поиска цели, время выхода БПЛА на рубеж атаки, вероятность захвата цели активной радиолокационной головкой самонаведения, минимальную и максимальную дальности применения БПЛА, способ обнаружения цели, суммарную траекторию полета БПЛА до цели и необходимое для этого количество топлива, полученные данные отображают с помощью экрана второго пользовательского интерфейса носителя, с помощью третьего пользовательского интерфейса на экран выводят диаграмму отображения траектории полетного задания БПЛА: точку пуска БПЛА, цель, пункты перемены маршрута, траекторию полета БПЛА, зону неопределенности положения цели, точку начала поиска цели, радиус рубежа атаки, угол прокачки антенны, при этом, если вероятность захвата цели, величина запаса топлива в БПЛА, параметры полетного задания, а также текущие параметры носителя входят в пределы заданных диапазонов, в БПЛА передают полетное задание и дают разрешение на его пуск.
Предлагаемый способ может быть использован при размещении БПЛА на различных типах носителей.
В случае размещения БПЛА на авиационном носителе, при помощи первого пользовательского интерфейса дополнительно вводят: температуру наружного воздуха у земли перед взлетом носителя, а также отображают текущие параметры носителя: координаты положения носителя, углы курса, крена, тангажа, скорость и высоту полета.
В случае размещения БПЛА на корабельном носителе, на экране первого пользовательского интерфейса отображают текущие параметры носителя: координаты положения носителя, скорость движения и углы курса, крена и тангажа.
В случае размещения БПЛА на автомобильном носителе на экране первого пользовательского интерфейса отображают координаты положения носителя.
Оценку величины остатков топлива в баках ракеты называют решением задачи досягаемости цели.
Сущность изобретения поясняется фигурами, на которых представлены:
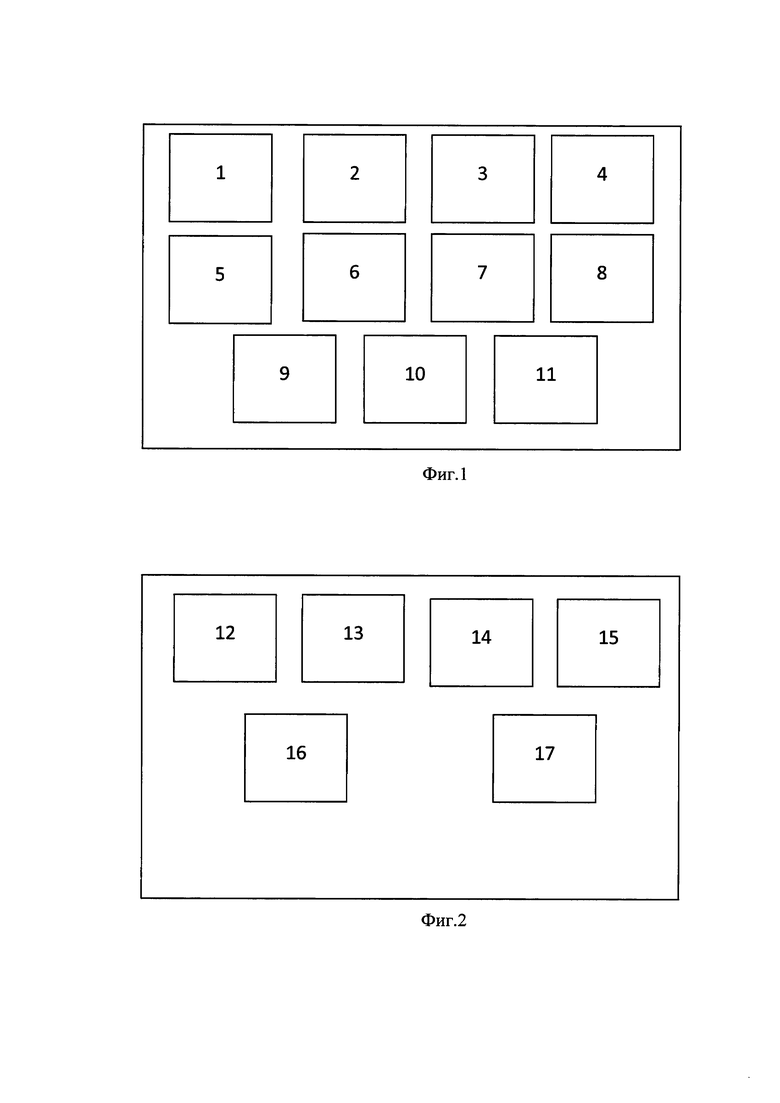
фиг. 1 - вид экрана первого пользовательского интерфейса;
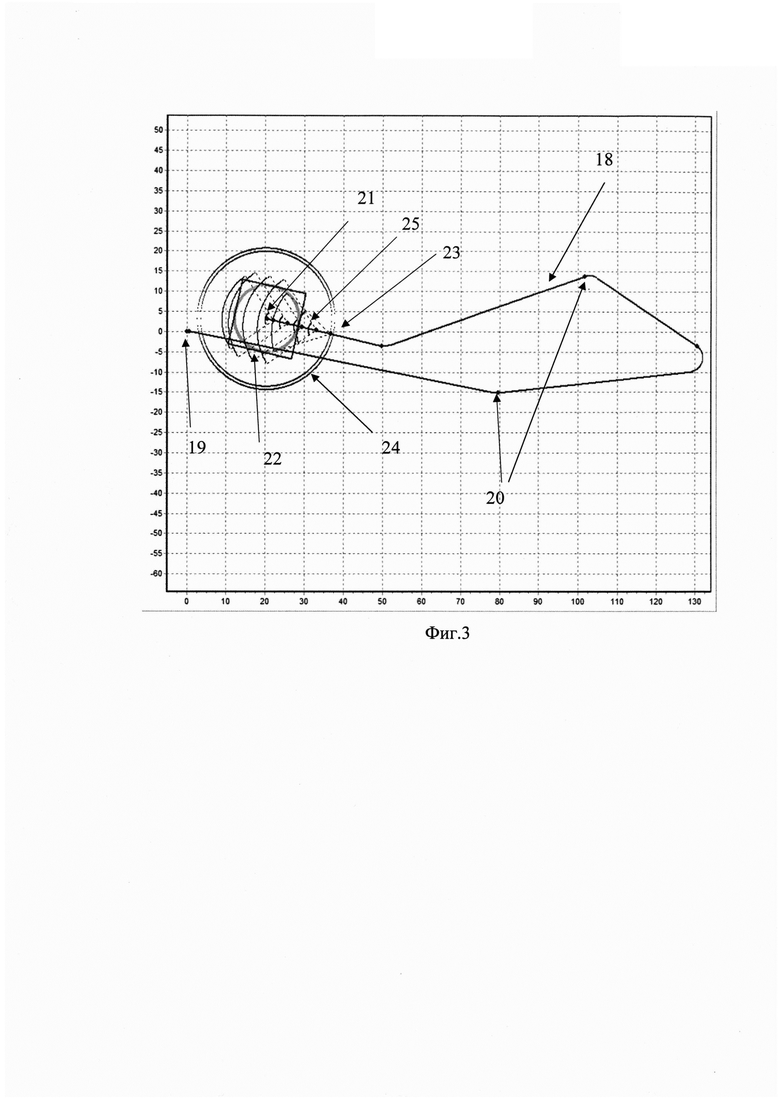
фиг. 2 - вид экрана второго пользовательского интерфейса;
фиг. 3 - вид экрана третьего пользовательского интерфейса.
На фиг. 1, 2, 3 обозначены:
1 - координаты положения цели;
2 - количество и координаты пунктов перемены маршрута;
3 - курс стрельбы;
4 - угол подхода к цели;
5 - угол целеуказания;
6 - признак и размер цели;
7 - тип топлива;
8 - скорость ветра;
9 - текущие координаты положения носителя;
10 - текущие скорость и высота движения носителя;
11 - текущие углы курса, крена и тангажа носителя;
12 - способ обнаружения цели;
13 - вероятность захвата цели АРГСН;
14 - время выхода БПЛА на рубеж атаки;
15 - суммарная дальность полета БПЛА до цели;
16 - необходимое для подлета к цели количество топлива;
17 - минимальная и максимальная дальности применения БПЛА;
18 - траектория полета БПЛА;
19 - точка пуска;
20 - пункты перемены маршрута;
21 - цель;
22 - зона неопределенности положения цели;
23 - точка начала поиска цели;
24 - радиус рубежа атаки;
25 - угол прокачки антенны.
Способ определения условий возможного пуска БПЛА, при котором с помощью первого пользовательского интерфейса носителя вводят координаты положения цели 1, количество и координаты пунктов перемены маршрута 2, курс стрельбы 3, угол подхода к цели 4, угол целеуказания 5, признак и размер цели 6, тип топлива 7, скорость ветра 8, а также отображают текущие параметры носителя 10, 11. Через равные промежутки времени в вычислительном модуле носителя рассчитывают точку предполагаемого начала поиска цели 19, время выхода БПЛА на рубеж атаки 14, вероятность захвата цели активной радиолокационной головкой самонаведения 13, минимальную и максимальную дальности применения БПЛА 17, способ обнаружения цели 12, суммарную дальность полета БПЛА до цели 15 и необходимое для этого количество топлива 16. Полученные результаты отображают с помощью экрана второго пользовательского интерфейса носителя, с помощью экрана третьего пользовательского интерфейса выводят диаграмму отображения траектории полета (полетное задание) БПЛА 18: зону неопределенности положения цели 22, точку начала поиска цели 23 и радиус рубежа атаки 24, положение цели 21, положение пунктов перемены маршрута 20, угол прокачки антенны 25. Если вероятность захвата цели 13, величина запаса топлива в БПЛА 16, параметры полетного задания, а также текущие параметры носителя 10,11 входят в пределы заданных диапазонов, в БПЛА передают полетное задание и дают разрешение на его пуск.
При реализации способа имитатор БПЛА размещают на контрольно-испытательном стенде и производят отладку программного обеспечения с использованием контрольных задач.
При реализации способа может быть использован вариант размещения БПЛА на авиационном носителе, в этом случае при помощи первого пользовательского интерфейса дополнительно вводят температуру наружного воздуха у земли перед взлетом носителя, а также отображают текущие параметры носителя: координаты положения носителя, углы курса, крена, тангажа, скорость и высоту полета.
При реализации способа может быть использован вариант размещения БПЛА на корабельном носителе, при этом на экране первого пользовательского интерфейса носителя отображают его текущие параметры: координаты положения носителя, скорость движения и углы курса, крена и тангажа.
При реализации способа может быть использован вариант размещения БПЛА на автомобильном носителе, при этом на экране первого пользовательского интерфейса отображают координаты положения носителя.
Координаты пунктов перемены маршрута и расчет параметров траектории движения БПЛА могут изменять во время движения носителя с учетом рельефа местности, а также наименьшей вероятности потери ракеты от противодействия сил противовоздушной обороны предполагаемого противника.
До запуска БПЛА, по данным разведки, выдаваемым навигационным оборудованием носителя, могут корректироваться признак и размер цели, а также количество назначенных ракет в залпе.
Рассмотрим формирование разрешенных условий стрельбы и логики выбора цели при размещении БПЛА на авиационном носителе, при этом: выбирают цель, выбирают пункты перемены маршрута, выбирают пределы параметров разрешающих применение БПЛА (текущую высоту носителя, углы курса, крена, тангажа носителя и приборную скорость полета носителя), разрабатывают алгоритм расчета движения БПЛА в горизонтальной плоскости, рассчитывают параметры траектории движения БПЛА в горизонтальной плоскости в связанной с носителем системе координат, рассчитывают параметры траектории движения БПЛА в вертикальной плоскости, рассчитывают в итерационном режиме суммарную траекторию полета БПЛА, разрабатывают алгоритмы расчета радиусов рубежа атаки, неопределенности положения цели, окружности для ограничения постановки пунктов перемены маршрута. Перед началом первой итерации обнуляют входные параметры, выходные параметры текущей итерации становятся входными для следующей, выход из итераций происходит, если разница между результатами предыдущей и последующей итерации не превышает заданного значения или количество итераций превысило 10. Определяют метод стрельбы, рассчитывают возможные максимальную и минимальную дальности до цели, решают задачу досягаемости цели, рассчитывают время выхода на рубеж атаки, формируют логику выбора цели, формируют привязку к системе координат, связанную с носителем.
Способ может быть реализован при помощи установленных на носителе: навигационного оборудования, прицельно-навигационного комплекса и вычислительного модуля.
Навигационное оборудование включает в себя: инерциальную систему управления, доплеровский измеритель составляющих скорости и спутниковую навигационную систему.
В качестве прицельно-навигационного комплекса может быть использована лазерно-прицельная система, которая используется в системах вооружения «Кайра».
Вычислительный модуль носителя содержит систему управления вооружением и систему управления оружием. В систему управления вооружением входят: бортовая автоматизированная система управления, содержащая специальное программное обеспечение, состоящее из главной управляющей программы, диспетчеров режимов, функционального программного обеспечения, программы встроенного контроля, а также алгоритмов отображения информации на экранах пользовательских интерфейсов. Система управления оружием содержит специальное программное обеспечение, в частности программное обеспечение аппаратуры подготовки пуска БПЛА носителя.
Предложенный способ определения условий возможного пуска БПЛА позволяет точно определить момент выдачи команды на пуск БПЛА с разных типов носителей.
Представленные фигуры и описание способа позволяют, используя существующую элементную базу, осуществить его, что характеризует предлагаемый способ как промышленно применимый.
Представленные аналоги
1. RU, заявка №2013157666, дата приоритета 24.12.2013, МПК B64G 1/40;
2. RU, патент №2525303, дата приоритета 05.10.2011, МПК F41F 3/00, G01S 7/38;
3. Системы управления вооружением истребителей: основы интеллекта многофункционального самолета / Под редакцией академика РАН Е.А. Федосова. М.: Машиностроение, 2005, стр. 31-37.
Изобретение относится к способу определения условия возможного пуска беспилотного летательного аппарата (БПЛА). Для определения возможности пуска с помощью первого пользовательского интерфейса вводят координаты цели, количество и координаты пунктов перемены маршрута, курс стрельбы, угол подхода к цели, угол целеуказания, признак и размер цели, тип топлива, скорость ветра, отображают текущие параметры носителя, через равные промежутки времени в вычислительном модуле носителя рассчитывают точку предполагаемого начала поиска цели, время выхода БПЛА на рубеж атаки, вероятность захвата цели активной радиолокационной головкой самонаведения, минимальную и максимальную дальность использования БПЛА, способ обнаружения цели, суммарную траекторию полета БПЛА до цели, необходимое количество топлива, которые отражают на экране второго пользовательского интерфейса носителя, выводят на экран с помощью третьего пользовательского интерфейса диаграмму отображения траектории полетного задания БПЛА, цель, пункты перемены маршрута, траекторию полета БПЛА, зону неопределенности положения цели, точку начала поиска цели, радиус рубежа атаки, угол прокачки антенны, передают в БПЛА полетное задание и дают разрешение на пуск при условии вхождения параметров в пределы заданных диапазонов. Обеспечивается точность определения момента выдачи команды на пуск БПЛА с разных типов носителей. 3ил.
Способ определения условий возможного пуска беспилотного летательного аппарата, при котором с помощью первого пользовательского интерфейса носителя вводят координаты положения цели, количество и координаты пунктов перемены маршрута, курс стрельбы, угол подхода к цели, угол целеуказания, признак и размер цели, тип топлива, скорость ветра, а также отображают текущие параметры носителя, при этом через равные промежутки времени в вычислительном модуле носителя рассчитывают точку предполагаемого начала поиска цели, время выхода беспилотного летательного аппарата на рубеж атаки, вероятность захвата цели активной радиолокационной головкой самонаведения, минимальную и максимальную дальности применения беспилотного летательного аппарата, способ обнаружения цели, суммарную траекторию полета беспилотного летательного аппарата до цели и необходимое для этого количество топлива, полученные данные отображают с помощью экрана второго пользовательского интерфейса носителя, с помощью третьего пользовательского интерфейса на экран выводят диаграмму отображения траектории полетного задания беспилотного летательного аппарата: точку пуска беспилотного летательного аппарата, цель, пункты перемены маршрута, траекторию полета беспилотного летательного аппарата, зону неопределенности положения цели, точку начала поиска цели, радиус рубежа атаки, угол прокачки антенны, при этом, если вероятность захвата цели, величина запаса топлива в беспилотном летательном аппарате, параметры полетного задания, а также текущие параметры носителя входят в пределы заданных диапазонов, в беспилотный летательный аппарат передают полетное задание и дают разрешение на его пуск.
| СПОСОБ НАВЕДЕНИЯ МНОГОЦЕЛЕВОГО ВЫСОКОТОЧНОГО ОРУЖИЯ ДАЛЬНЕЙ ЗОНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399854C1 |
| СПОСОБ СТРЕЛЬБЫ С ПАЛУБНОЙ ПУСКОВОЙ УСТАНОВКИ ПРОТИВОЛОДОЧНОГО РАКЕТНОГО КОМПЛЕКСА | 1995 |
|
RU2093783C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ СВЕРХЗВУКОВОЙ КРЫЛАТОЙ РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569971C1 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
| US 20100198514 A1, 05.08.2010. | |||

