Предлагаемая группа изобретений относится к средствам измерения и управления для широкого класса беспилотных систем, и в частности для беспилотных авиационных систем.
При создании беспилотных авиационных систем, имеющих полетное время 3 и более часов, возникает необходимость осуществления полета к посадочной позиции с учетом изменения давления атмосферы в месте ее расположения.
Известны система и способ дистанционного управления полетом БПЛА (USA Patent 6,377,875 от 23.04.2002г). Согласно этому способу осуществляют полет БПЛА по заранее запрограммированной траектории, когда необходимо осуществлять дистанционное управление полетом БПЛА.
Недостаток этого способа состоит в том, что информация о давлении атмосферы на посадочной позиции БПЛА не учитывается при полете БПЛА к посадочной позиции. Это существенно снижает возможность безаварийной посадки/спасения БПЛА.
В основу изобретения положено решение задачи повышения безопасности полета БПЛА в беспилотных авиационных системах.
Поставленная цель достигается тем, что в способе дистанционного управления полетом БПЛА с пункта управления посредством передачи управляющих данных на БПЛА по радиоканалу и передачи полетных данных от БПЛА на пункт управления, при котором осуществляют полет БПЛА по заранее запрограммированной траектории, когда необходимо, осуществляют дистанционное управление полетом БПЛА, согласно изобретению, определяют давление атмосферы на посадочной позиции БПЛА, передают данные о давлении атмосферы на посадочной позиции БПЛА от пункта управления на БПЛА через радиоканал, с учетом этих данных определяют на борту БПЛА барометрическую высоту полета относительно посадочной позиции БПЛА, по которой осуществляют управление высотой полета БПЛА.
Описанный способ дистанционного управления полетом БПЛА реализуется с помощью беспилотной авиационной системы, содержащей БПЛА, пункт управления, с посадочной позицией БПЛА, соединенные между собой посредством радиоканала, согласно изобретению, пункт управления выполнен с возможностью определения и передачи на БПЛА по радиоканалу данных о давлении атмосферы на посадочной позиции БПЛА, а БПЛА выполнен с возможностью автономного управления полетом с учетом этих данных.
Заявленное изобретение иллюстрируется приложенными графическими материалами, на которых изображено:
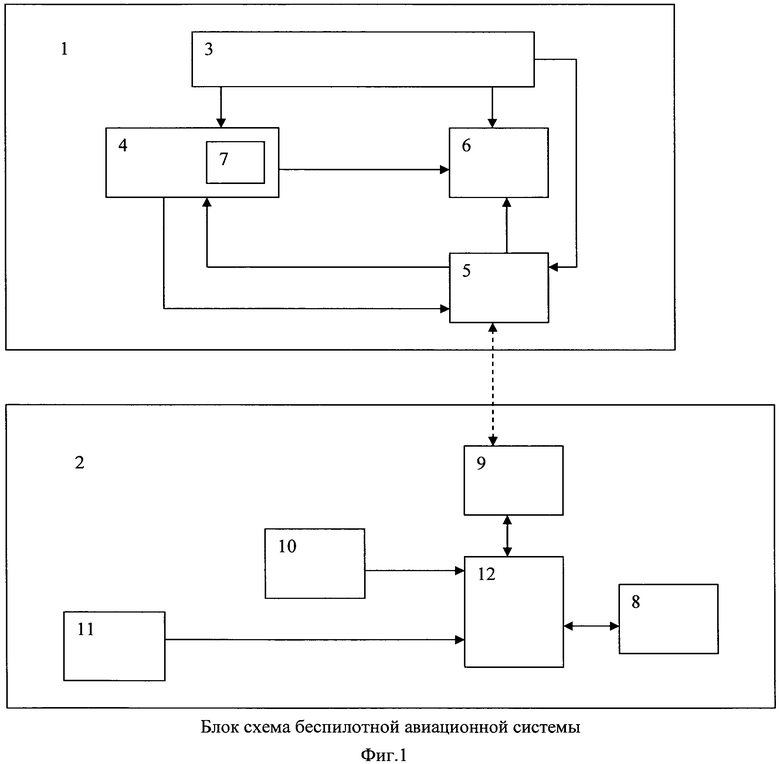
- Фиг.1. - Блок-схема беспилотной авиационной системы.
- Фиг.2. - Траектория полета в вертикальной плоскости.
- Фиг.3. - Траектория полета в горизонтальной плоскости.
Согласно предложенному способу дистанционного управления полетом БПЛА с пункта управления посредством передачи управляющих данных на БПЛА по радиоканалу и передачи полетных данных от БПЛА на пункт управления, при котором осуществляют полет БПЛА по заранее запрограммированной траектории, когда необходимо, осуществляют дистанционное управление полетом БПЛА, определяют давление атмосферы на посадочной позиции БПЛА, передают данные о давлении атмосферы на посадочной позиции БПЛА от пункта управления на БПЛА через радиоканал, с учетом этих данных определяют на борту БПЛА барометрическую высоту полета относительно посадочной позиции БПЛА, по которой осуществляют управление высотой полета БПЛА.
Беспилотная авиационная система (см. фиг.1) содержит БПЛА 1 и пункт управления
2.
БПЛА 1 содержит бортовые датчики 3, вычислитель траекторного управления 4, средства связи 5, автопилот 6. Вычислитель траекторного управления 4 содержит средства для запоминания полетных данных (заданной траектории полета) 7.
Пункт управления 2 содержит посадочную позицию 8, комплекс связи 9, метеостанцию 10, спутниковую навигационную систему 11, пост управления 12.
Первый и второй выходы бортовых датчиков 3 соединены с первыми входами вычислителя траекторного управления 4 и автопилота 6 соответственно. Первый и второй выходы средств связи 5 соединены со вторыми входами вычислителя траекторного управления 4 и автопилота 6 соответственно. Первый и второй входы средств связи 5 соединены с первым выходом блока траекторного управления 4 и третьим выходом бортовых датчиков 3 соответственно. Второй выход вычислителя траекторного управления 4 соединен с третьим входом автопилота 6. Средства связи 5 осуществляют связь (прием/передачу информации) с пунктом управления 2.
Выходы метеостанции 10, спутниковой навигационной системы 11 соединены с первым и вторым входами поста управления 12 соответственно. Первый и второй выходы поста управления 12 соединены со входами посадочной позиции 8 и комплекса связи 9 соответственно. Выход комплекса связи 9 соединен с третьим входом поста управления 12. Комплекс связи 9 осуществляет связь (прием/передачу информации) с БПЛА 1.
Возможность осуществления изобретения иллюстрируется на примере беспилотной авиационной системы. Этот пример не должен рассматриваться ни как ограничивающий объем изобретения, ни как предпочтительная для всех случаев форма его реализации.
В спутниковой навигационной системе 11 формируются координаты местоположения пункта управления 2 с позицией спасения 8.
Метеостанция 10 выдает давление атмосферы.
В посте управления 12, содержащем рабочее место оператора, осуществляется планирование траектории полета БПЛА 1. При планировании траектории полета БПЛА 1 вводятся координаты позиций пуска и посадки БПЛА, координаты, высоты промежуточных пунктов маршрута (ППМ), конечного пункта маршрута (КПМ), способ управления (маршрутный, путевой, комбинированный), исходя из полетного задания, например, мониторинга определенных объектов.
Траектория полета, в виде массива полетных данных (МПД), передается через комплекс связи 9 на БПЛА 1 в процессе предполетной подготовки. Указанный МПД поступает через средства связи 5 на средства для запоминания полетных данных 7, где запоминается.
Также в процессе предполетной подготовки на БПЛА 1 передаются данные о давлении атмосферы с метеостанции 10 через пост управления 12 и комплекс связи 9. Указанные данные поступают через средства связи 5 на средства для запоминания полетных данных 7, где запоминаются.
В процессе полета в посте управления 12 при необходимости могут формироваться сигналы дистанционного управления в виде заданных значений: угла курса, высоты полета, приборной скорости, которые поступают через канал связи (блоки 9, 5) на автопилот 6. Также в процессе полета на БПЛА 1 передаются: данные о текущем давлении атмосферы с метеостанции 10 через пост управления 12 и комплекс связи 9.
Бортовые датчики 3 содержат датчики аэрометрической информации: (статическое, полное давление) и датчики навигационной информации: текущие координаты местоположения БПЛА, параметры углового положения, угловых скоростей и ускорений.
С выхода 1 блока 3 поступают на вход блока траекторного управления 4 параметры:
- статическое давление;
- полное давление;
- температура воздушного потока;
- текущие координаты местоположения БПЛА.
С выхода 2 блока 3 поступают на вход автопилота 6 параметры:
- параметры углового положения, угловых скоростей и ускорений. В средствах для запоминания полетных данных 7 хранятся: координаты местоположения ППМ, КПМ и посадочной позиции 8, способ управления (маршрутный, путевой, комбинированный), данные о направлении ветровых возмущений, высота круга (Фиг.2), введенные при предполетной подготовке БПЛА 1. При пролете КПМ в блоке 7, по разовой команде с блока 4, осуществляется запоминание текущих данных о давлении атмосферы на позиции спасение БПЛА, поступающих с метеостанции 10, через блок 12, канал связи (блоки 9, 5) и блок 4. В случае потери связи с пунктом управления до пролета КПМ в блоке 7 осуществляется, по разовой команде с блока 4, запоминание последних, переданных по каналу связи данных о давлении атмосферы на посадочной позиции БПЛА 8.
В блоке 4 формируются: абсолютная барометрическая высота, барометрическая высота относительно посадочной позиции, скоростной напор и приборная скорость, поступающие на автопилот 6. Барометрическая высота полета относительно посадочной позиции формируется по данным о: статическом давлении и температуре с блока 3, давлении атмосферы на посадочной позиции с блока 7 и параметрам «стандартной атмосферы», также хранящихся в блоке 7.
В блоке траекторного управления 4 в соответствии с данными, хранящимися в блоке 7, формируются сигналы траекторного управления БПЛА 1, поступающие на автопилот 6:
- режим полета (маршрут, возврат, посадка);
- в боковом канале - заданный угол курса;
- в продольном канале - заданное значение абсолютной барометрической высоты полета в режиме Маршрут, заданное значение вертикального смещения (отклонение текущего значения относительной барометрической высоты от заданного) в режиме Возврат, заданное значение относительной барометрической высоты полета в режиме Посадка;
- в канале скорости - заданное значение приборной скорости. Траектория полета БПЛА 1 включает участок полета в режиме Маршрут,включающего ППМ, КПМ, участок полета в режиме Возврат: от КПМ до выхода БПЛА на «посадочный курс» (направление полосы посадочной позиции БПЛА) и участок полета в режиме «Посадка» - после выхода на «посадочный курс».
Траектория полета в режиме Возврат в вертикальной плоскости представляет собой снижение в точку, отстоящую на 1-2 км по горизонтали от точки 3-го разворота до высоты «круга» (100-200 м) (Фиг.2).
В режиме Возврат в горизонтальной плоскости осуществляется выход в точку, отстоящую на заданной дальности (2-4 км) от посадочной позиции 8 с заданным направлением (посадочной полосы) на нее (Фиг.3).
Формирование заданного угла курса для реализации такой траектории осуществляется в блоке 4 на основе комбинированного способа управления и с использованием данных о текущем положении БПЛА с блока 3, координатах местоположения посадочной позиции 8 и направлении посадочной полосы с блока 7. Полет в точку 3-го разворота, по касательной к окружности 3-4-го разворотов, осуществляется по кратчайшему расстоянию (путевой способ траекторного управления), далее осуществляются 3-й и 4-й развороты с выходом БПЛА в точку, отстоящую на заданной дальности от посадочной позиции БПЛА и с направлением на посадочную позицию БПЛА.
В режиме «Посадка» заданный угол курса задается равным «посадочному курсу», в продольном канале осуществляется снижение до полосы посадочной позиции БПЛА. При этом на завершающем участке снижения (с высоты 30 м) управление по высоте осуществляется путем отработки (в автопилоте 6) заданной относительной барометрической высоты, формируемой в блоке 4 в виде экспоненциально убывающей функции. В канале скорости осуществляется снижение приборной скорости до минимального значения.
В автопилоте 6 штатно реализуется автономный режим отработки управляющих сигналов с блока 4 с учетом признака режима полета (Маршрут, Возврат, Посадка).
При поступлении на второй вход автопилота 6 сигналов дистанционного управления (режим полета, заданные курс, высота, приборная скорость) с блока 5, автопилот 6 переходит в режим дистанционного управления с отработкой указанных сигналов.
Полунатурная отработка системы показала ее эффективность.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2475802C1 |
| Способ управления полетом беспилотного летательного аппарата и беспилотная авиационная система | 2019 |
|
RU2727416C1 |
| Способ управления полётом беспилотного летательного аппарата | 2022 |
|
RU2816327C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2562890C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РОБОТИЗИРОВАННОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВТОНОМНОМ РЕЖИМЕ | 2020 |
|
RU2733453C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| СПОСОБ ДИСТАНЦИОННОЙ КОРРЕКЦИИ ПОЛЕТНОГО ЗАДАНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2755411C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |

Группа изобретений относится к средствам измерения и управления для широкого класса беспилотных систем, и в частности для беспилотных авиационных систем. Способ дистанционного управления полетом БПЛА заключается в передаче данных через радиоканал. На БПЛА от пункта управления передаются данные о давлении атмосферы на посадочной позиции БПЛА. С учетом переданных данных на борту БПЛА определяют барометрическую высоту полета относительно посадочной позиции, по которой осуществляют управление высотой полета. Предложена беспилотная авиационная система, пункт управления которой выполнен с возможностью определения и передачи по радиоканалу на БПЛА данных о давлении атмосферы на посадочной позиции, а БПЛА выполнен с возможностью автономного управления полетом с учетом этих данных. Достигается возможность повышения безопасности полета БПЛА в беспилотных авиационных системах. 2 н.п. ф-лы, 3 ил.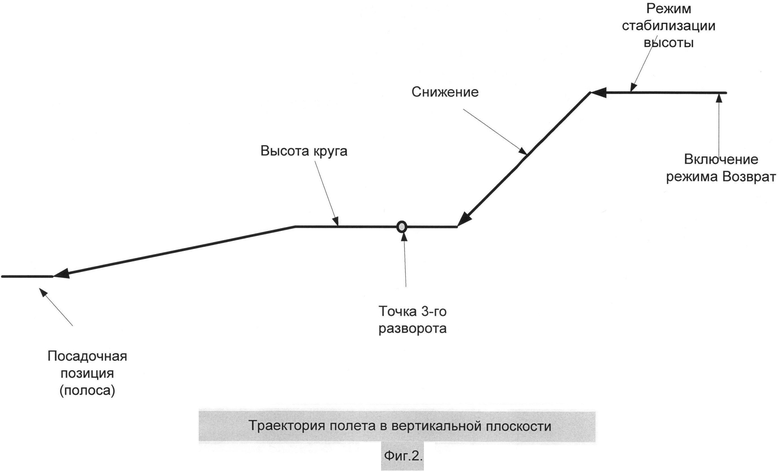
1. Способ дистанционного управления полетом БПЛА с пункта управления посредством передачи управляющих данных на БПЛА по радиоканалу и передачи полетных данных от БПЛА на пункт управления, при котором осуществляют полет БПЛА по заранее запрограммированной траектории, когда необходимо, осуществляют дистанционное управление полетом БПЛА, отличающийся тем, что определяют давление атмосферы на посадочной позиции БПЛА, передают данные о давлении атмосферы на посадочной позиции БПЛА от пункта управления на БПЛА через радиоканал, с учетом этих данных определяют на борту БПЛА барометрическую высоту полета относительно посадочной позиции БПЛА, по которой осуществляют управление высотой полета БПЛА.
2. Беспилотная авиационная система, содержащая БПЛА, пункт управления с посадочной позицией БПЛА, соединенные между собой посредством радиоканала, отличающаяся тем, что пункт управления выполнен с возможностью определения и передачи на БПЛА по радиоканалу данных о давлении атмосферы на посадочной позиции БПЛА, а БПЛА выполнен с возможностью автономного управления полетом с учетом этих данных.
| КОМПОЗИЦИИ, СОДЕРЖАЩИЕ СЕКРЕТОРНОПОДОБНЫЕ ИММУНОГЛОБУЛИНЫ | 2013 |
|
RU2644240C2 |
| RU 2011123531 A, 20.12.2012 | |||
| US 7962253 B1, 14.06.2011 | |||
| US 4017718 A, 12.04.1977 | |||

