Область техники
Изобретение относится к области робототехники и может быть использовано для дистанционного, беспилотного исследования как в обычных, так и труднодоступных или опасных для человека участках земной и инопланетной поверхностей, производить анализ состава атмосферы, может выполнять функцию передвижного приемопередающего устройства, принимая, усиливая какой-либо радиосигнал и передавая его другому приемному устройству. В качестве мобильного радиомаяка с возможностью корректировки его положения на местности, устройства видеонаблюдения, если разместить на его корпусе видеокамеры, в качестве автоматического миноискателя или металлоискателя, который составит карту расположенных под поверхностью передвижения объектов, воспринимаемых его сенсорами, сигнализирующим устройством для дистанционного замера радиации, температуры, наличия вредных газов, уровня задымленности, уровня напряженности магнитного, электромагнитного, электрического поля, в зависимости от установленных в нем датчиков и электронных узлов, также может выполнять функцию какого-нибудь развлекательного устройства. Название октаэдр отражает не внешнее сходство данного робота с геометрической фигурой октаэдром, поскольку у них больше отличий, чем сходств, а говорит о возможности разнообразного использования данного устройства, то есть о его возможной функциональной «многогранности».
Уровень техники
Отдаленными аналогами данного движущегося робота могут быть стационарные роботы, например опубликованные на стр. 50 «Промышленные роботы: основные типы и технические характеристики: учебное пособие / Ю.Г. Козырев. - М.: КНОРУС, 2017», которые используются в промышленности, поскольку их поддерживающие опоры (основания) неподвижны или передвигаются в каких-то определенных ограниченных пределах, а представленный здесь движущийся робот может передвигаться по поверхности на значительные расстояния, ограниченные его энергоресурсом и различными материальными препятствиями, мешающими его дальнейшему перемещению. Тем не менее, у данного робота существует возможность обойти преграду, если она небольших размеров, ему не нужно разворачиваться он имеет три первоначальных направления движения из одной точки, но если стационарные роботы в промышленности производят какую-то физическую работу, например перемещают предметы, сверлят отверстия и т.д., то представленный в данном описании робот предназначен скорее для выполнения научно-исследовательских, наблюдательных, сигнализирующих, радиопередающих, координационных функций, встроенных вместе, либо используемых по отдельности. В отличие от обычных датчиков, видеокамер, которые в основном установлены неподвижно где-то на местности и могут только менять угол обзора из одной точки, местоположение данного робота при необходимости можно корректировать за счет способности его передвигаться.
Более близким аналогом к представленному здесь роботу могут быть роботы, перемещающиеся по поверхности при помощи колес и гусениц, представленных на стр. 25 журнала «Техника молодежи» №1, 2011 год, стр. 9 журнала «Техника и вооружение» №1, 2016 год. Издательство ООО «Техинформ» г. Москва, их также можно использовать для тех же функции, к тому же по простоте исполнения механизмов передвижения, что колесные, гусеничные и представленный в описании робот намного проще, чем шагающие роботы с двумя, четырьмя и другим числом конечностей. Но данный робот тоже переворачиваясь может производить перешагивание через какие-то небольшие препятствия, не повредив их, и в отличие от колесных и гусеничных роботов меньше контактирует с поверхностью перемещения по площади соприкосновения, также у колесных и гусеничных роботов след непрерывный, им приходится пересекать колесами или гусеницами иногда достаточно большую часть поверхности передвижения, находящуюся под ними. Это свойство позволяет использовать данного робота при разминировании, если встроить металлодетекторы для обнаружения и передавать по радиосвязи сигнал с координатами обнаруженного объекта на компьютер оператора. Металлодетекторы либо какие-то другие сенсоры могут быть расположены в каждом из оснований штоков опор. Расположение подобных датчиков в колесах и гусеницах будет сложнее, и непонятно, в каком положении будут они находиться относительно земной поверхности при полной остановке подобных роботов, чтобы была возможность произвести необходимое детектирование почвы. Для этого скорее всего необходимо уже будет использовать какие-то дополнительно расположенные на корпусе штанги для металлодетектора. Но по проходимости по болотистой или по особо рыхлой поверхности, например снегу, преимущества по передвижению будут у роботов с колесами, а тем более у гусеничных аналогов.
С точки зрения перемещения по твердой поверхности близкими аналогами можно считать шагающих роботов с двумя, четырьмя конечностями, представленных на стр. 68 журнала «Наука и жизнь» №11, 2006 год, стр. 26 журнала «Техника молодежи» №1, 2011 год, но для их создания необходимо огромное количество разнообразных механических и электромеханических деталей, таких как электродвигатели, приводы различной мощности и назначения, также у данных роботов существует проблема с их балансировкой, для чего необходимо огромное число разнообразных датчиков их положения, также для совершения движения перемещения для данных аналогов необходимо сложное программное обеспечение для обработки информации от всех датчиков и для включения необходимых приводов, с увеличением сложности конструкции снижается надежность. Предлагаемый движущийся робот состоит из однотипных приводов, которые сами же являются опорами и могут выполнять роль радиоантенн, во всех вышеперечисленных шагающих роботах электроприводы несут свое прямое назначение, что увеличивает число дополнительных деталей, также в них созданы множество дополнительных подвижных соединительных узлов, в которых происходит потеря энергии. Суммарные потери могут быть достаточно значительными, а их сходства с живыми существами являются бесполезными для тех функций, которые выполняет представленный в описании движущийся робот.
Технический результат, который достигнут в данном устройстве, это своеобразный способ передвижения по плоской твердой поверхности, отличный от способа передвижения вышеперечисленных аналогов роботов, при котором в момент передвижения робота два штока двух приводов выполняют роль опор, а третий привод со штоком опираясь производит отталкивание от поверхности передвижения, перемещая движущегося робота в нужном направлении. Источник энергии, размещенный в корпусе, обеспечивает необходимой энергией приводы и электронику управления. Электроника управления предназначена для управления приводами движущего робота.
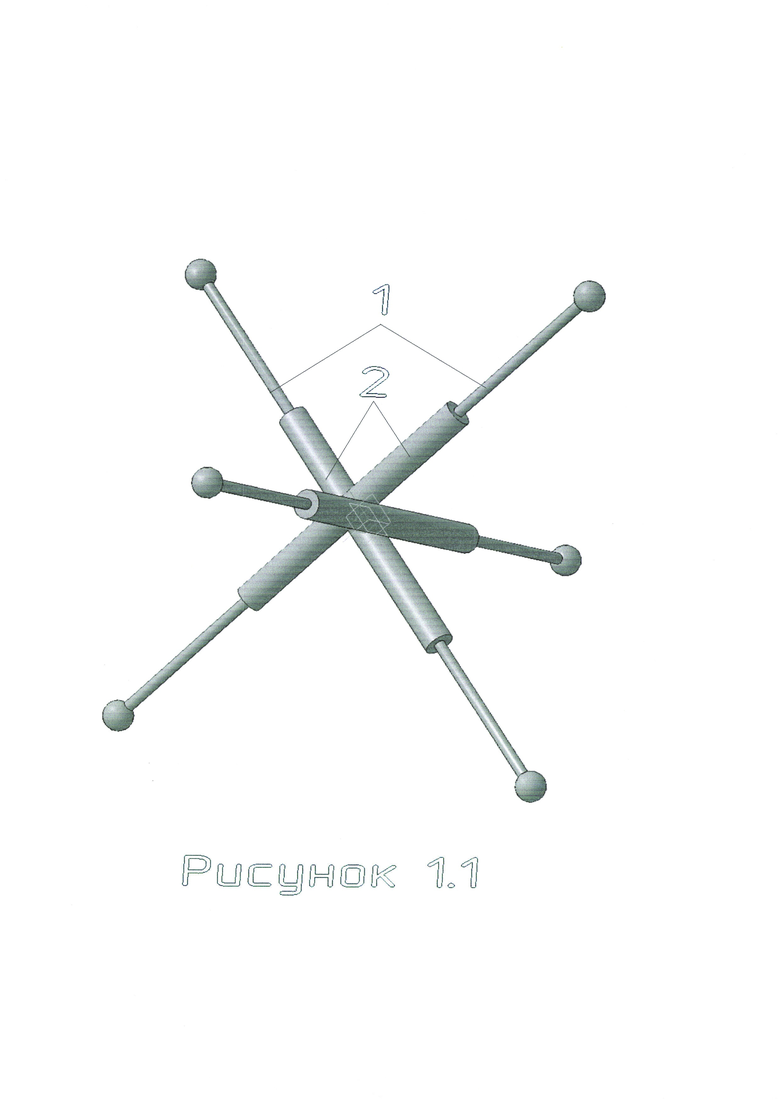
На рисунке 1.1 изображено расположение приводов трехприводного движущегося робота.
Штоки, изображенные на рисунке, указаны цифрой 1, цилиндры приводов обозначены цифрой 2. Цилиндры 2 приводов соединены между собой рядом с центрами их длин под прямым углом 90° между их осями. Штоки 1 одного из трех одинаковых приводов, выдвинутых с противоположных сторон, могут являться цельной деталью привода, проходящего насквозь через его цилиндр, производя отталкивание от поверхности перемещения с обеих сторон в зависимости от расположения штока в пространстве.
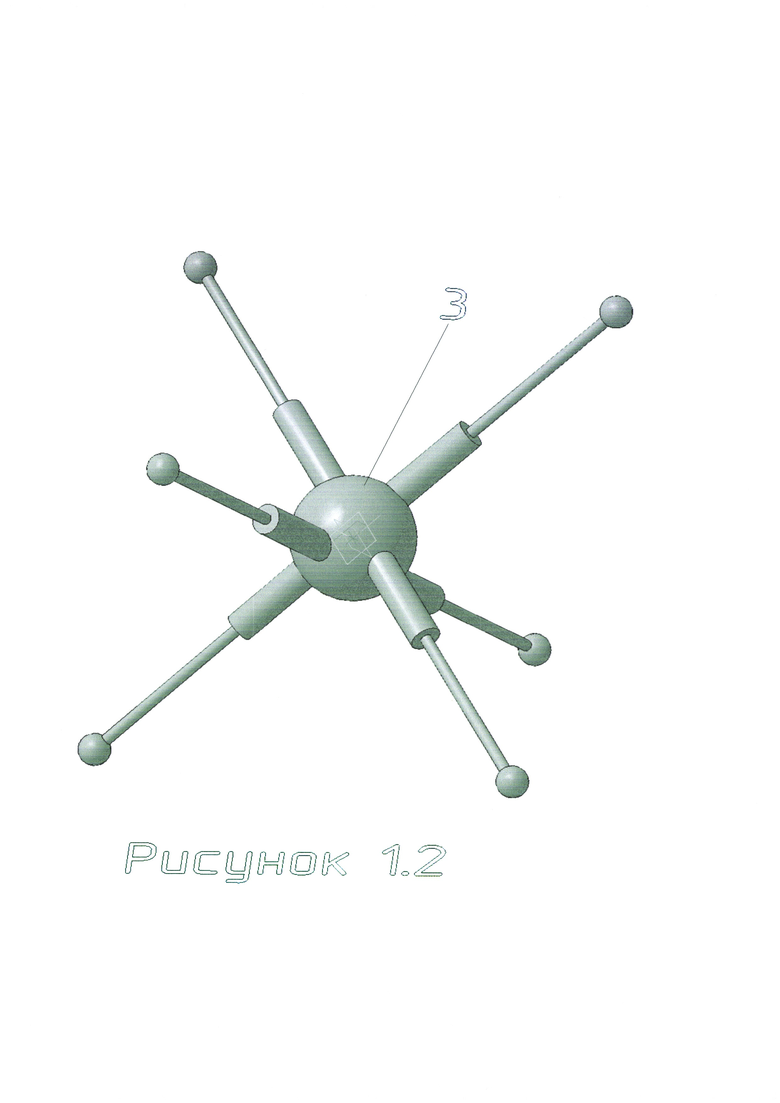
На рисунке 1.2 изображен трехприводный движущийся робот с корпусом 3 условно выбранной сферической формы.
Корпус 3 робота расположен вокруг центра длин цилиндров 2 приводов вокруг места их соединения. Корпус 3 предназначен для размещения источника энергии, электроники управления робота и других узлов, необходимых в индивидуальных случаях, а также корпус 3 служит их защитой от механических повреждении.
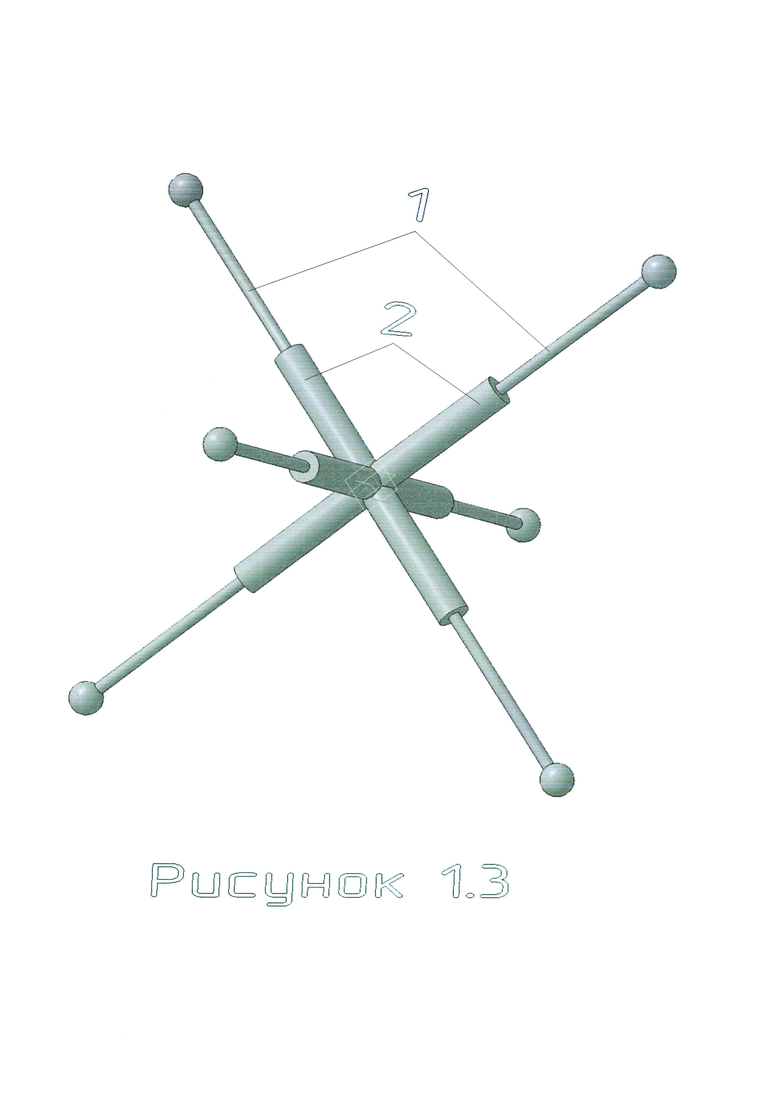
На рисунке 1.3 расположение приводов шестиприводного движущегося робота.
Штоки 1 приводов, находящихся на одной оси с противоположных сторон, двигаются независимо друг от друга. Все приводы соединены в центре торцами цилиндров 2 под углом 90°, а приводы, находящиеся на одной оси, имеют угол между торцами 0°. В отличие от трехприводного приводы шестиприводного робота расположены симметрично в трех плоскостях пространства.
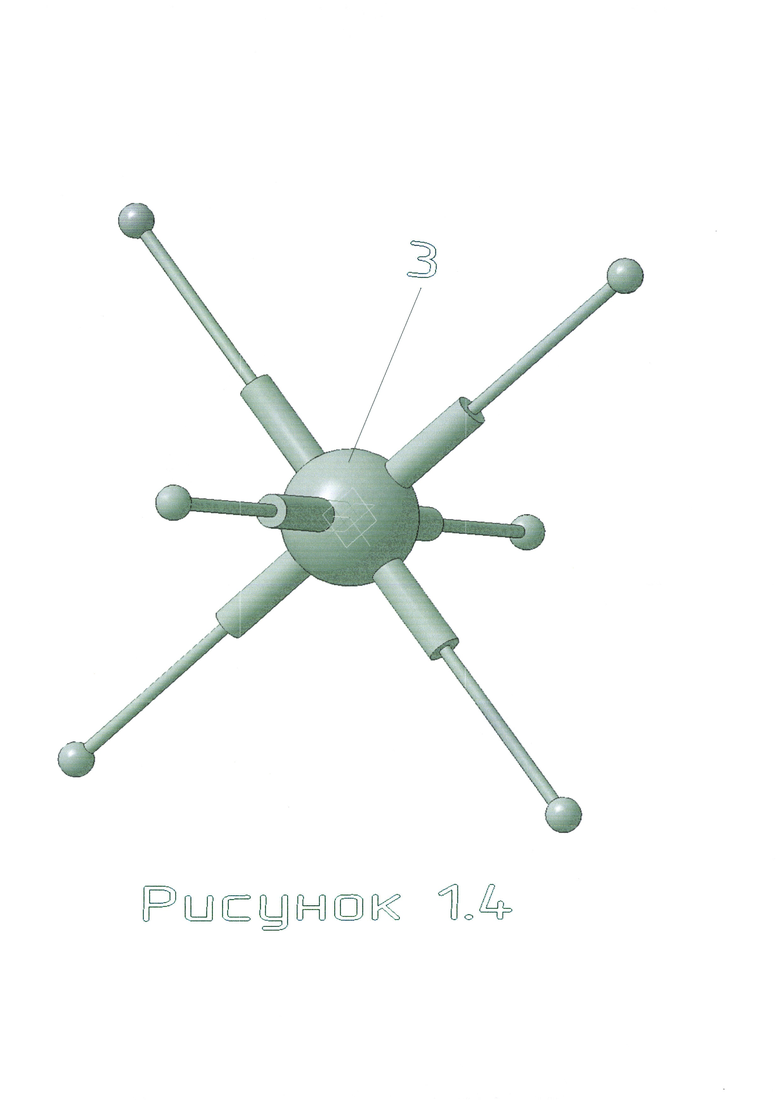
На рисунке 1.4 изображен шестиприводный движущийся робот с корпусом 3 условно выбранной сферической формы.
Так же как и у трехприводного робота корпус расположен вокруг центра соединения приводов и имеет то же предназначение.
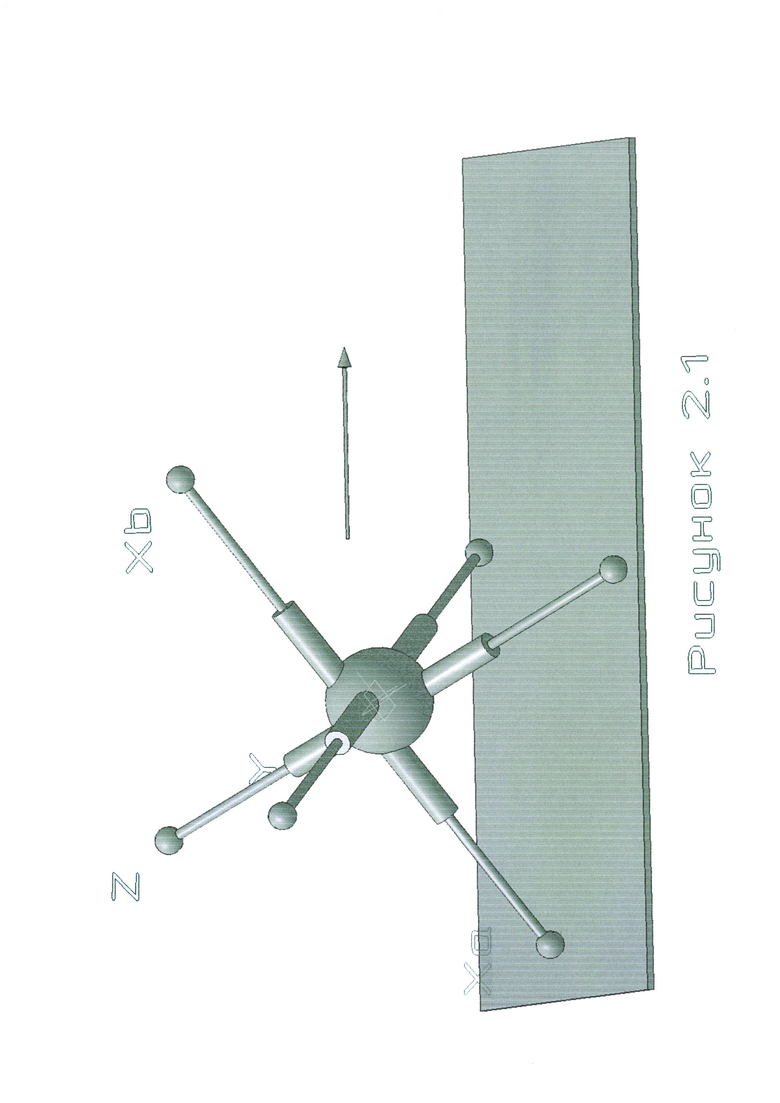
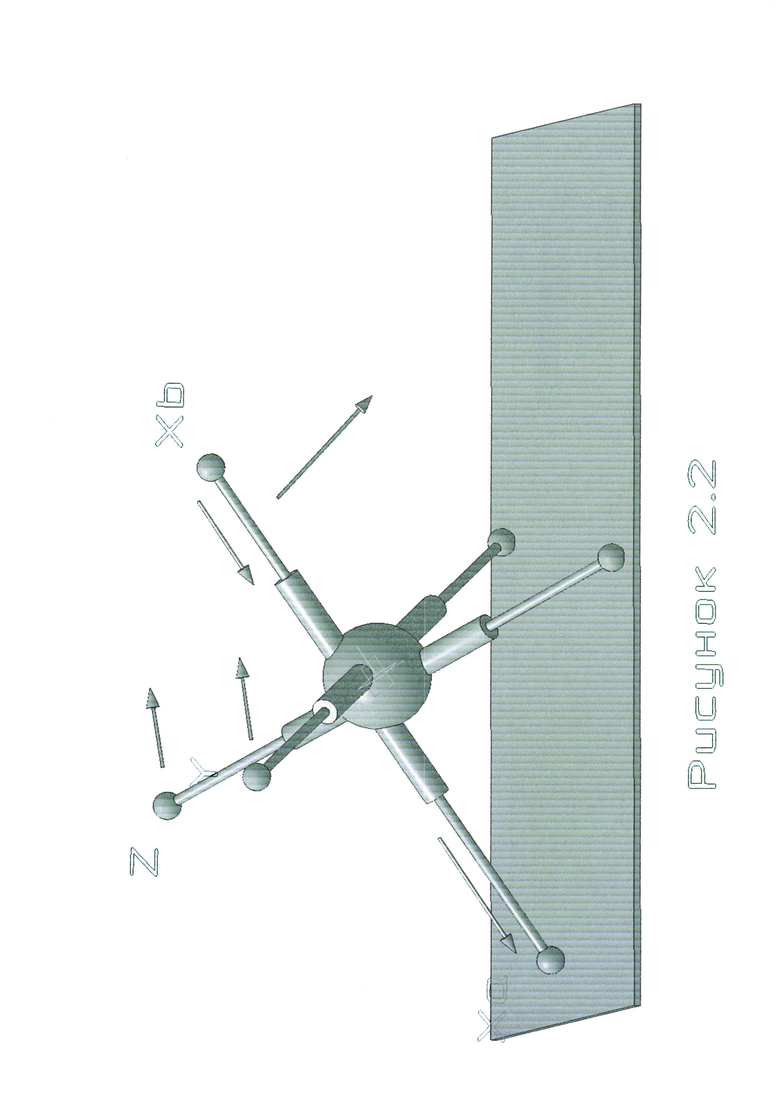
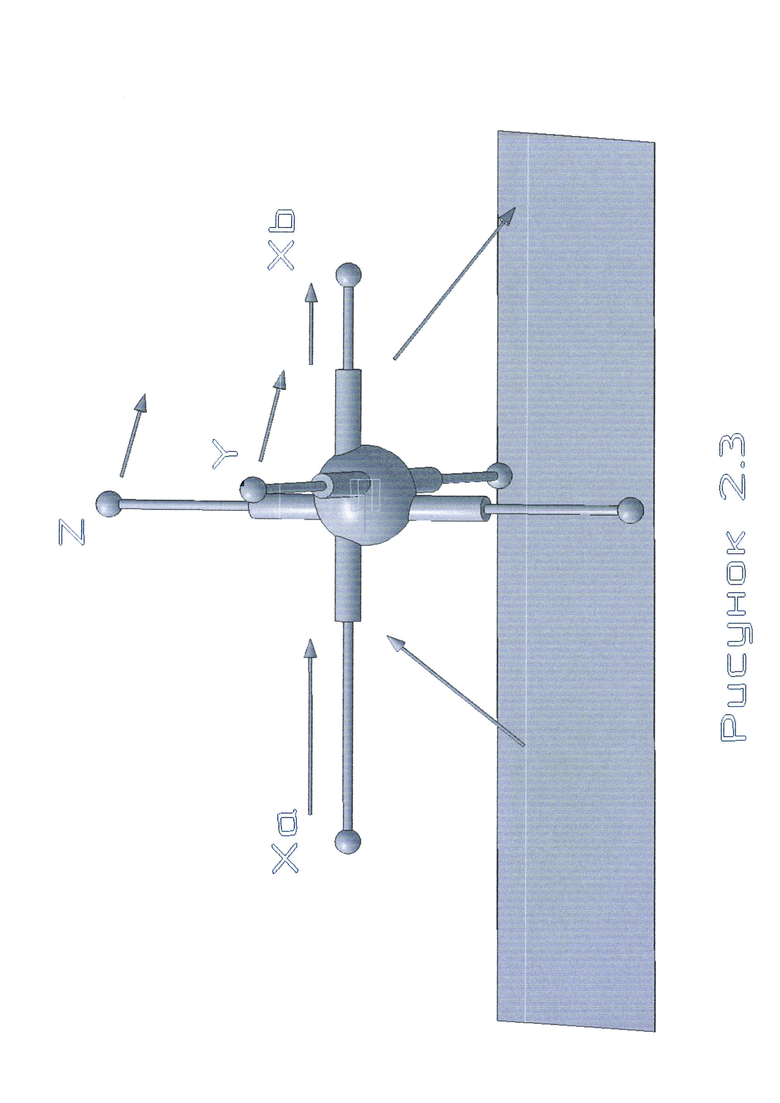
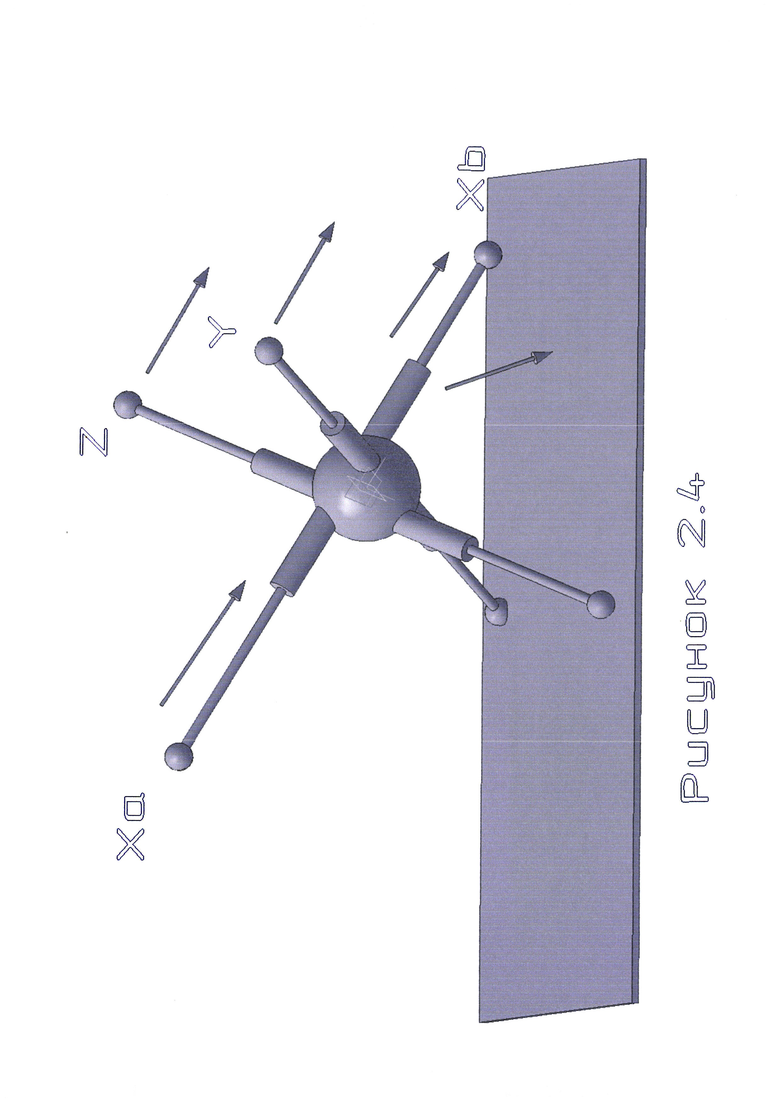
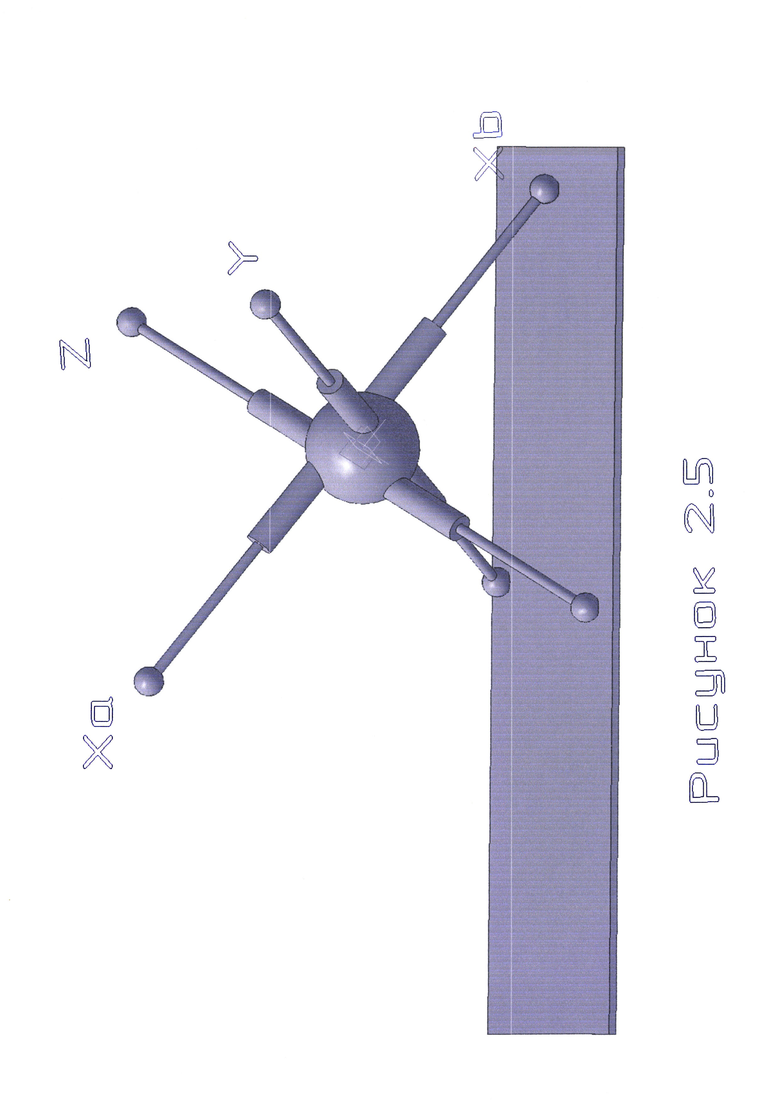
На рисунках 2.1-2.5 показано движение робота на примере трехприводного робота по плоской поверхности.
На рисунке 2.1 робот находится неподвижно в исходном положении, опираясь на три нижних штока-опоры. Все штоки наверху и внизу выдвинуты на одинаковое расстояние из цилиндров приводов, стрелкой указано направление дальнейшего перемещения робота. На рисунке 2.2 происходит отталкивание штока Ха от поверхности перемещения, создаваемое выдвижением его из цилиндра привода, при этом шток Xb втягивается внутрь, поскольку является продолжением штока Ха, выступая с противоположной стороны цилиндра привода. Корпус робота и верхние штоки приводов Y, Z начинают перемещаться в направлении, указанном стрелками, опираясь при этом на нижние штоки-опоры приводов Y, Z, находящиеся неподвижно относительно плоскости перемещения. На рисунке 2.3 шток Ха уже оторван от поверхности перемещения и начинает втягиваться обратно в цилиндр привода, при этом противоположный шток Xb выдвигается и центр тяжести робота, начинает смещаться в направлении штока Xb, опираясь только на нижние штоки Y, Z. На рисунке 2.4 происходит преодаление позиции возвращения робота в обратное положение, центр тяжести робота смещен в направлении выдвигающегося штока Xb, что способствует дальнейшему движению корпуса робота и установке его на шток Xb, принимая окончательное положение, указанное на рисунке 2.5. Дальнейшее направление смещения робота задается следующим отталкивающим движением одного из трех приводов, находящихся на этот момент на поверхности перемещения.
Движение шести приводного робота по поверхности перемещения аналогично движению трех приводного робота, но штоки находящиеся на одной оси работают независимо друг от друга и при выдвижении одного из штоков, шток находящийся с противоположной стороны, неподвижен.
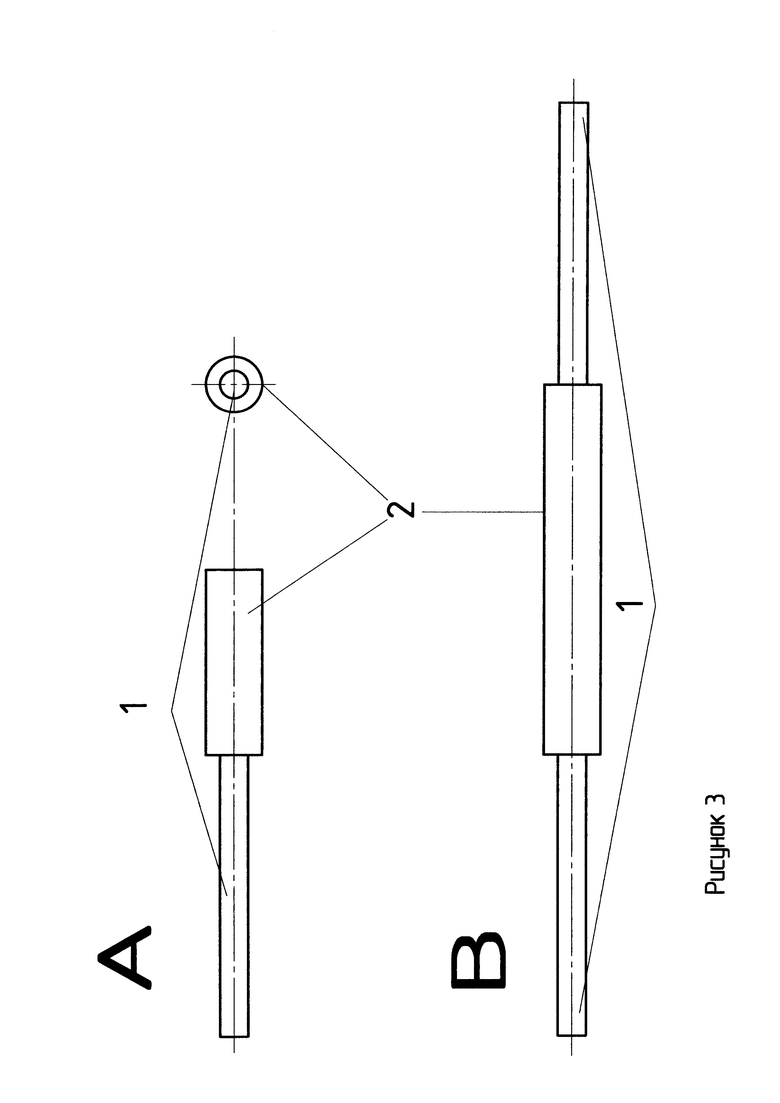
На рисунке 3 условно изображены два привода.
Под буквой А расположен привод шестиприводного движущегося робота, состоящий из цилиндра 2, который неподвижно соединяется торцами с еще пятью такими же приводами в конструкции робота. Шток-опора 1 у такого привода выдвигается лишь с одной стороны цилиндра привода, с другой стороны выполненного с глухой стенкой, являющейся торцом.
Под буквой В расположен привод трехприводного движущегося робота, состоящего из цилиндра 2 с отверстиями с противоположных сторон в основаниях цилиндра с расположенными штоками 1 с обеих сторон, имеющих общую основу.
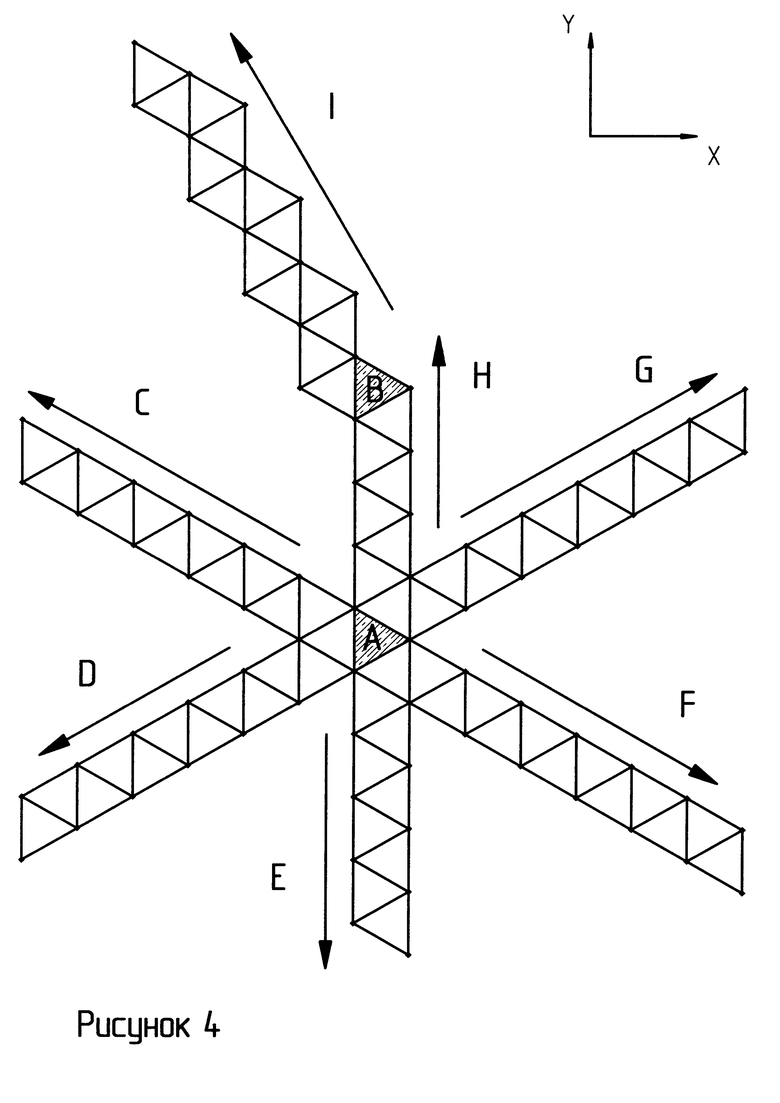
На рисунке 4 изображена траектория движения робота по плоской поверхности (вид сверху).
На рисунке показано упрощенное движение робота из точки А с наименьшей сложностью и использованием меньшего числа поворотов, что позволяет ему двигаться в шести направлениях C, D, E, F, G, H. Для изменения угла движения при перемещении в направлении I, в точке В сложность движения увеличивается и возникает необходимо использовать большее число поворотов для перемещения робота в заданном направлении I.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2418234C1 |
| Револьверное шасси наземного транспортного средства повышенной проходимости | 2018 |
|
RU2694873C1 |
| Машина для отделочных работ | 1987 |
|
SU1498899A1 |
| Транспортное средство высокой проходимости | 2021 |
|
RU2814872C2 |
| СПОСОБ ПЕРЕДВИЖЕНИЯ УСТРОЙСТВА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2237590C2 |
| Шагающий болотоход | 2022 |
|
RU2792148C1 |
| АГРОПРОМЫШЛЕННЫЙ АГРЕГАТ | 2005 |
|
RU2289900C1 |
| НОГА ШАГАЮЩЕГО АППАРАТА | 2014 |
|
RU2594316C2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНЕШНЕГО И ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2202701C2 |
| Шагающий болотный тягач | 2022 |
|
RU2779001C1 |
Изобретение относится к области робототехники, в частности к вариантам движущегося робота, и может быть использовано для дистанционного беспилотного исследования труднодоступных или опасных для человека участков земной и инопланетной поверхностей. Движущийся робот состоит из трех или шести приводов поступательного движения, состоящих из неподвижно соединенных цилиндров под углом 90° между их осями и выдвигающихся штоков-опор, и корпуса, расположенного вокруг места соединения упомянутых приводов с размещенными внутри источником энергии и узлом управления. Робот выполнен с возможностью поочередного отталкивания штоков-опор от поверхности перемещения. Два штока-опоры при движении служат опорами робота, находящимися на поверхности перемещения, с возможностью выдвижения из цилиндра третьего штока-опоры и его отталкиванием от поверхности перемещения с обеспечением смещения центра тяжести робота и опрокидывания его корпуса через два штока-опоры, находящихся на поверхности перемещения. 2 н.п. ф-лы, 11 ил.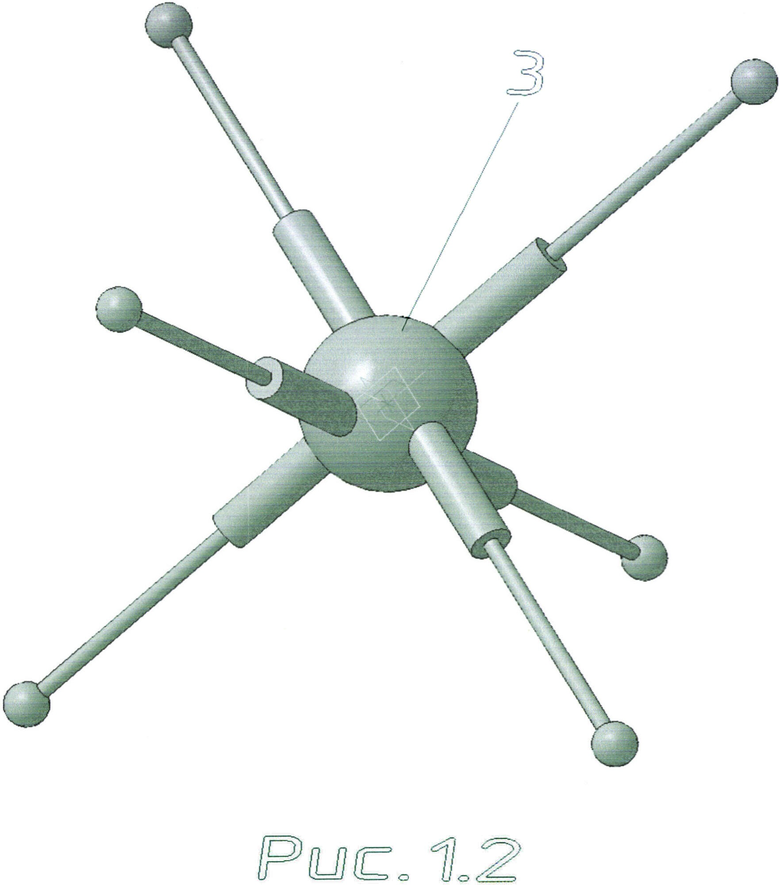
1. Движущийся робот, состоящий из трех приводов поступательного движения, состоящих из неподвижно соединенных цилиндров под углом 90° между их осями, место соединения которых выполнено рядом с их центрами, и выдвигающихся с противоположных сторон штоков-опор, проходящих насквозь цилиндры, и корпуса, расположенного вокруг места соединения упомянутых приводов с размещенными внутри источником энергии и узлом управления, при этом робот выполнен с возможностью поочередного отталкивания штоков-опор от поверхности перемещения, причем два штока-опоры при движении служат опорами робота, находящимися на поверхности перемещения, с возможностью выдвижения из цилиндра третьего штока-опоры и его отталкиванием от поверхности перемещения с обеспечением смещения центра тяжести робота и опрокидывания его корпуса через два штока-опоры, находящихся на поверхности перемещения.
2. Движущийся робот, состоящий из шести приводов поступательного движения, состоящих из цилиндров, неподвижно соединенных торцами под углом 90° между осями цилиндров, и выдвигающихся штоков-опор, и корпуса, расположенного вокруг места соединения упомянутых приводов с размещенными внутри источником энергии и узлом управления, при этом робот выполнен с возможностью поочередного отталкивания штоков-опор от поверхности перемещения, причем два штока-опоры при движении служат опорами робота, находящимися на поверхности перемещения, с возможностью выдвижения из цилиндра третьего штока-опоры и его отталкивания от поверхности перемещения с обеспечением смещения центра тяжести робота и опрокидывания его корпуса через два штока-опоры, находящихся на поверхности перемещения, причем штоки-опоры приводов, находящихся на одной оси, выполнены с возможностью выдвижения независимо друг от друга.
| МОБИЛЬНЫЙ ШАГАЮЩИЙ РОБОТ | 1992 |
|
RU2057046C1 |
| Щелочной аккумулятор | 1956 |
|
SU106215A1 |
| ШАГАЮЩИЙ МЕХАНИЗМ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2042559C1 |
| US 5219410 А, 15.01.1993. | |||

