Изобретение относится к движителям транспортных средств с поочередно или последовательно поднимаемыми опорами, взаимодействующими с поверхностью дороги, и может применяться на аппаратах, предназначенных для передвижения по пересеченной местности.
Известна нога шагающего аппарата, содержащая крепежный узел и последовательно сочлененные с ним и между собой посредством шарниров бедро и голень, имеющие приводы для совершения циклических пространственных движений (см. опубликованную в Интернете Пояснительную записку к дипломному проекту Луцкого В.А. на тему «Исследование адаптивных алгоритмов передвижения шестиногого шагающего робота», Москва, 2013, с.31-32, рис. 20, Робот «DFRobot Hexapod Robot Kit»).
Известная нога в процессе движения упирается в поверхность дороги непосредственно нижним свободным концом голени. Опускание такой ноги сопровождается ударом, что вредно сказывается и на ноге, и на аппарате, к которому она прикреплена.
Известна также нога шагающего аппарата, принятая за прототип, содержащая крепежный узел и последовательно сочлененные с ним и между собой посредством шарниров бедро, голень и стопу, имеющие приводы для совершения циклических пространственных движений (см. опубликованный в Интернете Автореферат магистерской выпускной работы Тимонова А.В. на тему «Разработка алгоритмов управления шестиногим шагающим аппаратом «Катарина» на основе заданных походок», Донецк 2002, с.3, рис.1). Стопа шарнирно закреплена на опорном конце голени через амортизатор. Количество приводов равно трем. Два из них предназначены для сгибания и выпрямления ноги в вертикальной плоскости путем качания бедра относительно крепежного узла и голени относительно бедра. Третий привод предназначен для поворота ноги в горизонтальной плоскости путем поворота бедра в крепежном узле.
Аппарат, имеющий такие ноги, чаще в количестве шести, может передвигаться как на полусогнутых, так и на выпрямленных ногах. Шагать он может в любом направлении, если будут задействованы все три привода на каждой ноге. Однако наиболее оптимальной является такая походка, когда ноги только сгибаются и выпрямляются в вертикальных плоскостях, параллельных направлению движения аппарата, без поворота в горизонтальной плоскости. В этом случае, для изменения направления движения аппарата, его ноги необходимо вначале повернуть соответствующим образом, что может потребовать остановки аппарата, и связано с потерей времени. Это обстоятельство можно рассматривать как недостаток известной ноги.
Задачей заявляемого изобретения является устроение указанного недостатка прототипа.
Предлагаем следующее решение. В заявляемой ноге шагающего аппарата, которая, как и известная, содержит крепежный узел и последовательно сочлененные с ним и между собой посредством шарниров бедро, голень и стопу, имеющие приводы для совершения циклических пространственных движений, бедро с шарнирами с обеих сторон и приводами выполнено в виде шестистержневого шарнирного механизма со стержнями управляемо изменяемой длины по типу опрокинутой платформы Стюарта, к которой прикреплена верхняя часть голени.
Техническим результатом заявляемого изобретения является обеспечение возможности сгибать и выпрямлять ногу в вертикальной плоскости в любом требуемом направлении без ее предварительного поворота.
Развитием изобретения, направленным на обеспечение возможности использования ноги для шагания по неровной поверхности, является выполнение голени телескопической, например, в виде гидравлического цилиндра, на конце штока которого шарнирно закреплена стопа.
Кроме того, для расширения вышеуказанной возможности в стопу ноги встроен дальномер, например ультразвуковой.
Еще одним развитием заявляемого изобретения, решающим задачу обеспечения обратной связи с системой управления движениями ноги, является размещение в центре шестистержневого шарнирного механизма телескопического стержня, шарнирно прикрепленного к крепежному узлу и к платформе, и снабженного датчиками контроля его длины и угловых положений относительно крепежного узла и платформы в двух взаимно перпендикулярных плоскостях.
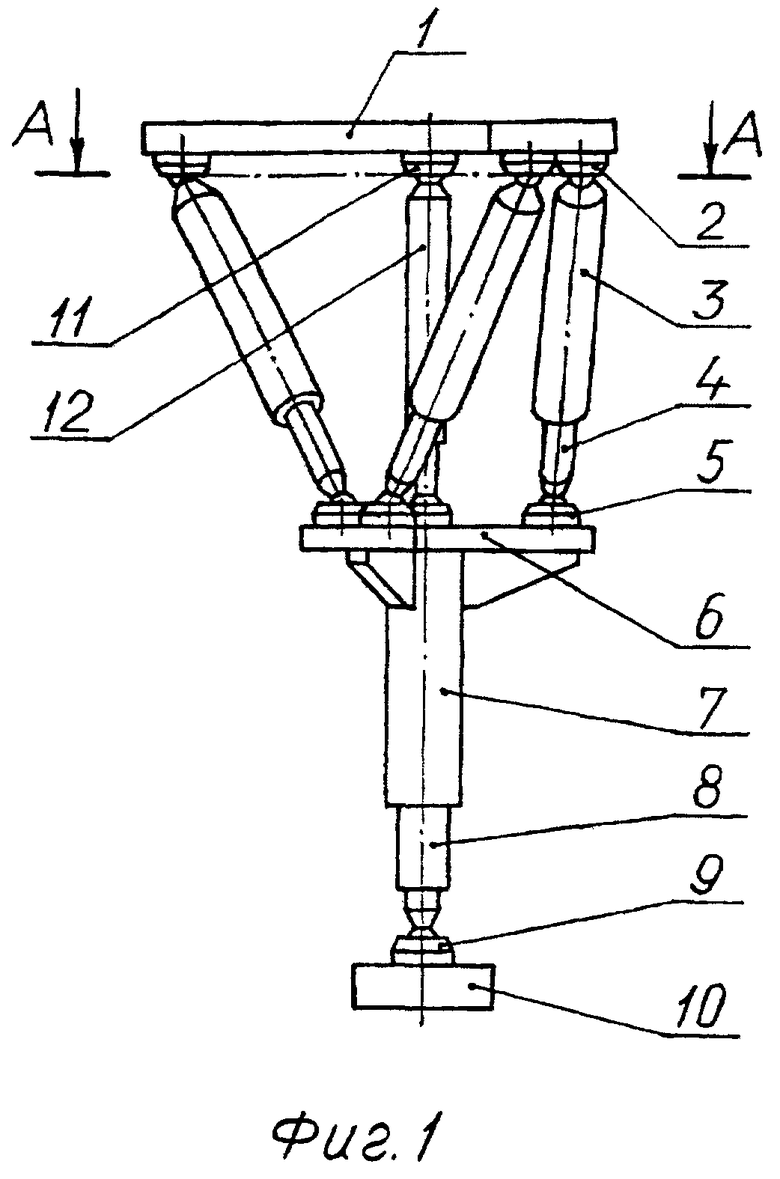
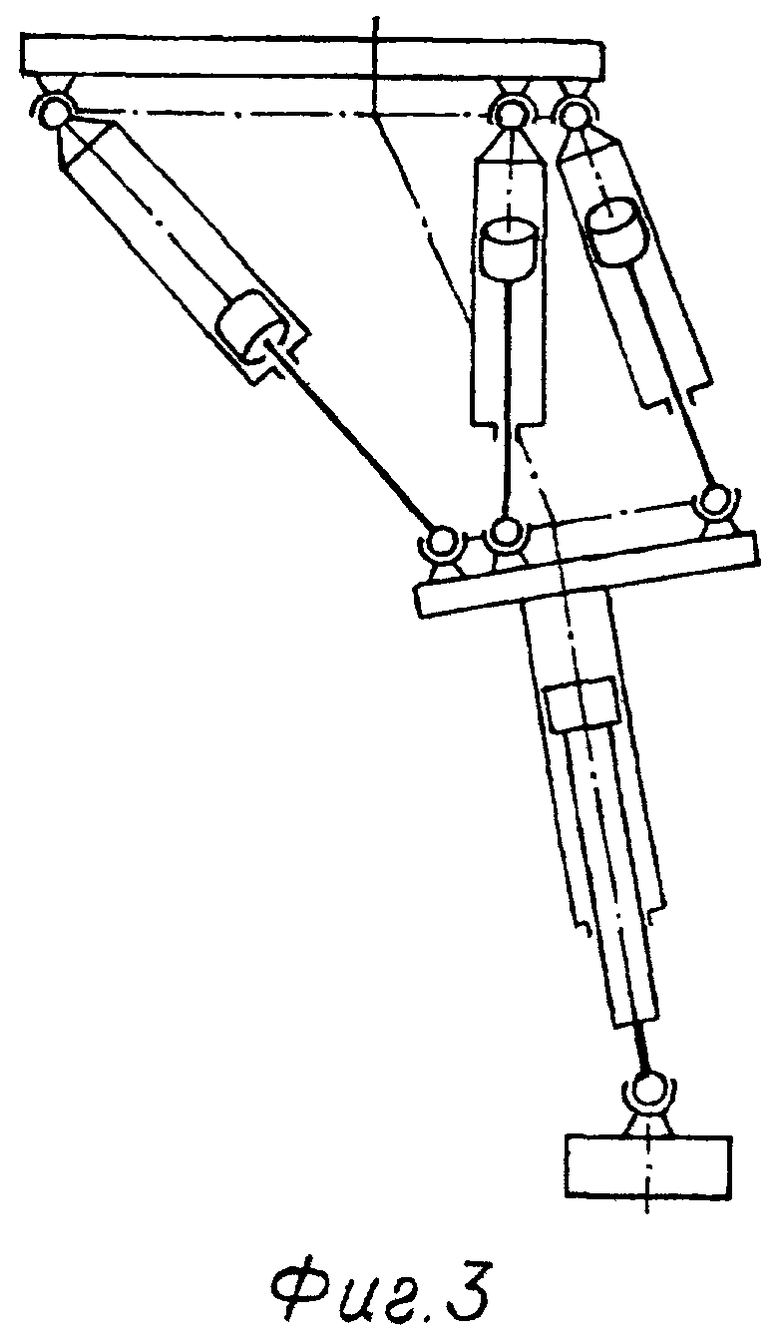
Сущность изобретения поясняется с помощью рисунков, на которых упрощенно изображен общий вид заявляемой ноги шагающего аппарата. На фиг. 1 показан фронтальный вид ноги в выпрямленном положении; на фиг. 2 - разрез по А-А на фиг. 1. На фиг. 3 нога показана схематично в согнутом и приподнятом для совершения шага положении.
На крепежном узле 1, предназначенном для соединения с шагающим аппаратом (не показан), посредством шаровых шарниров 2 закреплены шесть стержней управляемо изменяемой длины, выполненных в виде гидравлических цилиндров 3. Концы их штоков 4 посредством шаровых шарниров 5 прикреплены к платформе 6. Цилиндры 3 со штоками 4 и шарнирами 2 и 5 составляют бедро ноги. Величина хода штоков 4 должна быть таковой, чтобы обеспечивать необходимые сгибы ноги. В случае применения гидроцилиндров 3 с большей величиной хода штоков 4, появляется возможность удлинять или укорачивать, при необходимости, бедро ноги.
Голень ноги выполнена в виде гидроцилиндра 7, жестко закрепленного на платформе 6. Шток 8 цилиндра 7 является полым и имеет внутри пружинный амортизатор (не показан), с которым посредством шарового шарнира 9 соединена стопа 10. Все гидроцилиндры снабжены датчиками контроля величины хода штоков (не показаны).
В стопу 10 встроены передающий и приемный элементы ультразвукового дальномера, остальные части которого размещены на узле 1 (не показаны).
Между центрами узла 1 и платформы 6 размещен и прикреплен к ним посредством шаровых шарниров 11 телескопический стержень 12. Стержень снабжен датчиками контроля его длины и угловых положений относительно крепежного узла и платформы в двух взаимно перпендикулярных плоскостях (не показаны).
Сгибание и выпрямление ноги описанной конструкции в вертикальной плоскости в любом выбранном направлении осуществляется путем выдвижения штоков 4 из гидроцилиндров 3 на необходимую расчетную величину. Для этого аппарат, к которому прикреплены такие ноги, должен иметь в своем составе:
- гидростанцию, способную осуществлять подачу рабочей жидкости под необходимым давлением и в требуемом количестве;
- блок гидравлических распределителей с соответствующей аппаратурой;
- интеллектуальную систему управления движением аппарата, способную корректировать параметры управления гидроцилиндрами ног по показаниям датчиков, которыми они снабжены и которыми оснащен сам аппарат.
Элементы дальномера, встроенные в стопу 10, сообщают о расстоянии до поверхности, на которую опустится нога. В случае появления под стопой ямки или бугорка, это позволит соответственно удлинить или укоротить голень на необходимую величину путем выдвижения штока 8 из гидроцилиндра 7 или втягивания в него.
На основании вышеизложенного считаем возможным утверждать, что предлагаемая нога обладает существенно большими возможностями, чем ноги, созданные природой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Нога шагающего аппарата | 2018 |
|
RU2709945C1 |
| ВЗРЫВОЗАЩИЩЕННЫЙ ШАГАЮЩИЙ РОБОТ | 2023 |
|
RU2832153C1 |
| Кресло-тренажер | 1989 |
|
SU1703097A1 |
| Способ изготовления ортопедического аппарата нижней конечности для больных с последствиями параличей нижних конечностей | 2021 |
|
RU2807146C2 |
| СПОСОБ РЕАЛИЗАЦИИ ЗАДНЕГО ТОЛЧКА ПРИ ОСЛАБЛЕНИИ МЫШЦ ДИСТАЛЬНОЙ ЧАСТИ НИЖНЕЙ КОНЕЧНОСТИ И ОРТОПЕДИЧЕСКИЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2092134C1 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2095269C1 |
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |
| Аппарат ортопедический на всю ногу | 2018 |
|
RU2708841C1 |
| Экзоскелет | 2023 |
|
RU2830368C1 |
| ОРТЕЗНАЯ СИСТЕМА | 2020 |
|
RU2753801C1 |
Изобретение относится к движителям транспортных средств, взаимодействующим с поверхностью дороги, и может применяться на аппаратах, предназначенных для передвижения по пересеченной местности. Нога шагающего аппарата содержит крепежный узел и последовательно сочлененные с ним и между собой посредством шарниров бедро, голень и стопу, имеющие приводы для совершения циклических пространственных движений. Бедро с шарнирами с обеих сторон и приводами выполнено в виде шестистержневого шарнирного механизма со стержнями управляемо изменяемой длины по типу опрокинутой платформы Стюарта, к которой прикреплена верхняя часть голени. Голень ноги выполнена телескопической, например в виде гидравлического цилиндра, а в стопу встроен дальномер. В центре шестистержневого шарнирного механизма размещен телескопический стержень, шарнирно прикрепленный к крепежному узлу и к платформе и снабженный датчиками контроля его длины и угловых положений относительно крепежного узла и платформы в двух взаимно перпендикулярных плоскостях. Достигается возможность сгибать и выпрямлять ногу в вертикальной плоскости в любом требуемом направлении без ее предварительного поворота. 3 з.п. ф-лы, 3 ил.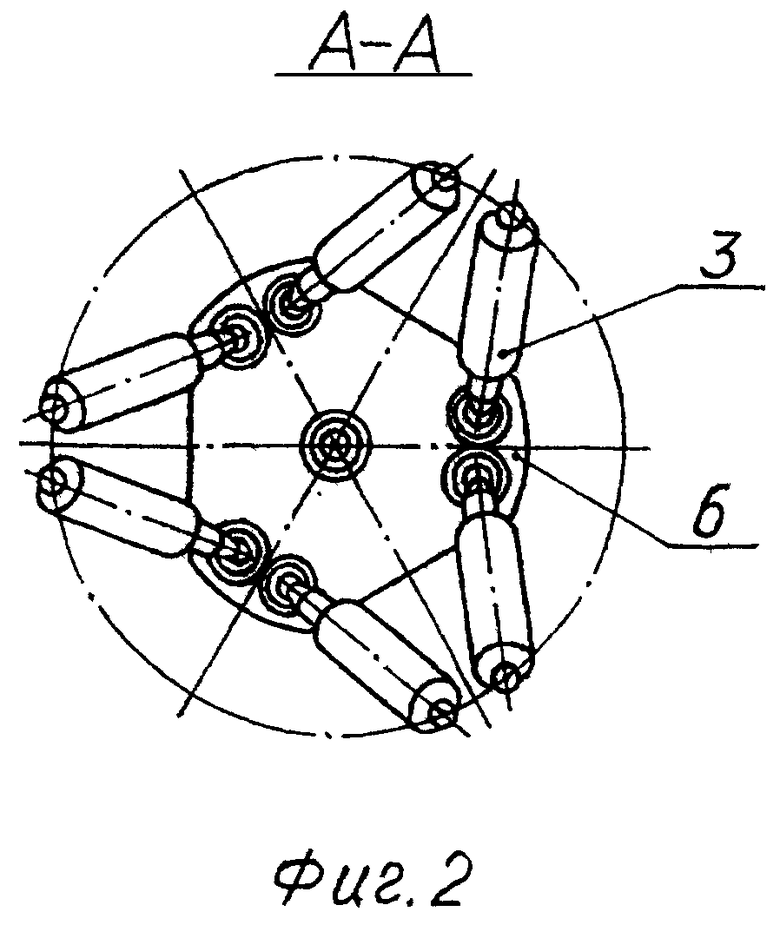
1. Нога шагающего аппарата, содержащая крепежный узел и последовательно сочлененные с ним и между собой посредством шарниров бедро, голень и стопу, имеющие приводы для совершения циклических пространственных движений, отличающаяся тем, что бедро с шарнирами с обеих сторон и приводами выполнено в виде шестистержневого шарнирного механизма со стержнями управляемо изменяемой длины по типу опрокинутой платформы Стюарта, к которой прикреплена верхняя часть голени.
2. Нога по п.1, отличающаяся тем, что голень выполнена телескопической, например в виде гидравлического цилиндра, на конце штока которого шарнирно закреплена стопа.
3. Нога по пп.1 и 2, отличающаяся тем, что в стопу встроен дальномер, например ультразвуковой.
4. Нога по п.1, отличающаяся тем, что в центре шестистержневого шарнирного механизма размещен телескопический стержень, шарнирно прикрепленный к крепежному узлу и к платформе и снабженный датчиками контроля его длины и угловых положений относительно крепежного узла и платформы в двух взаимно перпендикулярных плоскостях.
| US 2009200090 A1, 13.08.2009 | |||
| ШАГАЮЩИЙ ХОД И САМОХОДНАЯ МАШИНА НА ЕГО ОСНОВЕ | 2011 |
|
RU2452647C1 |
| JP 3435666 B2, 11.08.2003 | |||
| ШАГАЮЩИЙ РОБОТ | 1992 |
|
RU2043915C1 |
| WO 9910137 A1, 04.03.1999. | |||

