Настоящее изобретение относится к области механических движителей, и, в частности, к способам передвижения кинематически избыточных многоэлементных роботов, имеющих цепную структуру.
Большинство известных транспортных средств используют в качестве движителя либо колесо, либо его гибкую модификацию - замкнутую в кольцо ленту, которая, в свою очередь, приводится в движение колесами. Широко известные гусеничные транспортные средства, такие как танк, в которых используются две гусеницы, обладают высокой проходимостью.
Однако гусеничные транспортные средства малопригодны при необходимости проникать сквозь узкие щели или каналы. Для передвижения в жидкой среде колесным и гусеничным транспортным средствам необходим дополнительный движитель. Необходимость создание автономных робототехнических устройств, подобно живым существам содержащих в себе универсальный движитель, заставляет обращаться к миру живой природы.
Применение в технике принципов передвижения, подобных используемым безногими пресмыкающимися, в частности змеями, является перспективным в отношении построения обладающих высокой проходимостью роботов. Такие роботы, будучи снабжены телекамерами и средствами связи, могут быть использованы для исследования различных территорий, где непосредственное присутствие человека является невозможным или нежелательным, в частности зараженных территорий, в целях инспекции изнутри таких технических сооружений как трубопроводы, или при исследовании космических объектов.
Замкнутые формулировки способов передвижения змеевидных роботов, позволяющих повторять моды локомоций пресмыкающихся, отсутствуют. Движение существующих физических моделей пресмыкающихся строится управляющим компьютером с помощью эвристических алгоритмов из условия похожести движений. Уровень техники в этой области к настоящему времени, в основном, ограничен экспериментальными бионическими макетами, которые внешне имитируют движения змей, и простыми самодвижущимися игрушками.
Известные конструктивные реализации робота-змеи представляют собой цепь последовательно соединенных элементов, выполненных с возможностью изгибаться в заданных направлениях.
Известна игрушка "Змея" по патентной заявке RU 95112042, в нескольких вариантах, в одном из которых она содержит гибкий полый корпус, выполненный в виде набора последовательно соединенных сильфонов, внутри которых на концевых участках установлены пары цилиндрических шарниров. Оси шарниров расположены в поперечном сечении горизонтальной плоскостью, проходящей по оси корпуса, причем на каждой паре шарниров установлены по две скобы, развернутые в противоположные стороны. Скобы, установленные на соседних парах шарниров одного сильфона, соединены жесткими валами с возможностью вращения последних относительно скоб, причем оси вращения концов, на которых установлены скобы, каждого из валов расположены под углом друг к другу, а концы соседних валов соединены узлом передачи крутящего момента, причем плоскости, в которых лежат оси вращения концов каждого вала, или отрезки, перпендикулярные к этим осям, имеют последовательное угловое смещение в одну сторону относительно предыдущей плоскости или отрезка вокруг продольной оси корпуса. Игрушка снабжена приводом вращения валов относительно корпуса. При включении привода такая игрушка, благодаря фиксированному смещению осей валов, совершает заданное волнообразное движение, подобное движению ползущей змеи. Разумеется, такое устройство не способно перемещаться в произвольно заданном направлении.
Известна имитирующая змею модель, способная перемещаться в заданном направлении, будучи управляемой по радио, эта модель описана на http://www.snakerobots.com/. Модель представляет собой цепь шарнирно соединенных элементов, каждый из которых снабжен электрической батареей и собственным приводом, позволяющим заданным образом изгибать "змею" в местах шарнирных соединений, обеспечивающих две степени свободы. Характерной особенностью элемента является колесо, ось которого ориентирована поперек вытянутой цепи. Это колесо, на которое опирается элемент, играет важную роль в процессе перемещения модели. Колесо обеспечивает подвижность элемента, катящегося на колесе, в то же время, колеса элементов изогнутой цепи, расположенных поперек или под углом к направлению движения, обеспечивают упор, достаточный для того, чтобы "змея", опираясь на горизонтальный изгиб в хвостовой части, могла вытолкнуть катящиеся на колесах элементы головной части вперед. Модель может перемещаться по горизонтальной поверхности вперед (в направлении от "хвоста" к "голове"), совершая волнообразные движения в горизонтальной плоскости, при этом все ее элементы опираются на поверхность, по которой она ползет.
Помимо упомянутой модели известны также и другие модели змееподобных роботов, в которых каждый элемент представляет собой повозку на двух и более колесах. Все такие модели из-за наличия колес, на которых катятся элементы, обеспечивают проходимость не выше, чем обычные колесные транспортные средства. Такая проходимость робота может оказаться недостаточной на сыпучем или вязком грунте.
Другие типы движения, обеспечивающие перемещение цепной механической структуры, описаны в патенте US 5662587, раскрывающем робот-эндоскоп. Робот, предназначенный для исследования внутренних трактов и полостей человеческого организма, перемещается, упираясь в стенки тракта. В тесных пространствах, когда просвет тракта соизмерим с диаметром робота-эндоскопа, последний перемещается, используя тип движения, условно называемый "движением земляного червя". При этом типе движения один или несколько задних элементов, способные увеличиваться в диаметре при нагнетании в них газа, надуваются до упора в стенки тракта. Элементы, находящиеся перед ними, вытягиваются в длину, затем, один или несколько передних элементов, надуваясь, закрепляются внутри тракта, а задние сдуваются и подтягиваются к передним. Повторение этого движения обеспечивает перемещение робота-эндоскопа вперед по узкому тракту. Когда диаметр тракта значительно превышает диаметр элементов робота, используется тип движения, аналогичный описанному, с тем отличием, что закрепление робота за стенки тракта осуществляется благодаря его волнообразному изгибанию. Используемый способ передвижения является энергетически экономичным, но обеспечивает невысокую скорость передвижения, и применим только в каналах или щелях, когда робот имеет возможность упираться в противоположные стенки.
Известен способ перемещения змееподобного гибкого микроробота, описанный в Интернет-публикации, посвященной разработке, проводившейся с 1995 г. в университете города Мец, Франция, по проекту "Коперник" (http://hp.agip.sciences.univ-metz.fr/~mihalach/copernicus news.html от 24.04.2000).
Робот представляет собой цепь из жестко соединенных друг с другом одинаковых элементов, не содержащих поддерживающих колес.
Элемент этого робота выполнен с возможностью удлиняться (сокращаться), а также изгибаться в произвольно заданном направлении. Элемент содержит по краям две пластины, взаимное положение которых определяет форму элемента. Для соединения элементов друг с другом служит жесткий стержень, который неподвижно закреплен с наружных сторон смежных пластин соседних элементов. Указанные три степени свободы достигаются с помощью соединяющего пластины механизма. Поперечная жесткость элемента вместе с возможностью изменения расстояния между пластинами обеспечиваются неподвижно закрепленной на одной из пластин осевой трубкой и вставленным в нее стержнем, который может продольно перемещаться внутри осевой трубки, стержень шарнирно закреплен на другой пластине. Расстояние между центрами пластин и их взаимный наклон задаются тремя винтовыми тягами, закрепленными в шарнирах, расположенных через 120° по периферии пластин. Длина каждой из тяг устанавливается независимо друг от друга с помощью реверсивного электродвигателя привода. Таким образом, робот представляет собой относительно жесткую конструкцию, которая может быть произвольно изогнута путем подачи напряжения соответствующих полярностей на электродвигатели.
Головной элемент снабжен средством для зацепления за грунт, обеспечивающим значительный коэффициент трения. В публикации сравниваются типы движения: с изгибанием в горизонтальной плоскости и в вертикальной плоскости, а также движение, обеспечиваемое удлинением элементов периодически следующих участков цепи, подобное движению земляного червя. Однако при изгибании в вертикальной плоскости возникает проблема устойчивости робота, т.е. риск его опрокидывания набок в процессе перемещения, поэтому, предпочтение отдается движению "земляного червя".
Задачей настоящего изобретения является создание такого способа передвижения протяженного в длину устройства, содержащего в качестве движителя протяженное тело, выполненное с возможностью изгибания, который обеспечивал бы экономичность в отношении затрат энергии в сочетании с высокой проходимостью и устойчивостью устройства в процессе передвижения по различным поверхностям.
Поставленная задача решается тем, что в способе передвижения с опорой на несущую поверхность устройства, содержащего в качестве движителя протяженное тело, выполненное с возможностью изгибания для придания ему заданной формы, при этом длина тела между двумя его концами превышает поперечные размеры тела, включающий изгибание тела, обеспечивающее создание областей опоры устройства, в которых тело прилегает к несущей поверхности, образуя с ней неподвижный контакт, при этом создают волнообразное движение тела в виде бегущей от первого конца ко второму волны, обеспечивающее перемещение каждой области опоры вдоль несущей поверхности по мере последовательной смены в области опоры, образующих ее участков тела в направлении от первого конца ко второму, при этом до начала передвижения телу устройства придают заданную форму и создают волнообразное движение тела, обеспечивающее в процессе передвижения периодическое повторение первоначально заданной формы тела, в процессе смены в области опоры предыдущего участка тела на следующий, контакт с несущей поверхностью по меньшей мере в одной точке предыдущего участка прерывают после создания контакта в этой области опоры следующим участком тела, согласно изобретению волна, бегущая от первого конца тела ко второму концу тела, приводит области опор в движение качения колеса с радиусом кривизны, равным радиусу кривизны этой зоны тела по несущей поверхности, при этом области опор образуют контур, внутри которого находится центр тяжести устройства.
Целесообразно в процессе передвижения устройства изменять протяженность по меньшей мере одной области опоры. Например, для преодоления неровностей опорной поверхности или обеспечения статической устойчивости устройства при одновременном опирании только на две опоры.
Целесообразно при перемещении устройства по существенно горизонтальной несущей поверхности изгибать тело таким образом, чтобы создать конфигурацию одновременно существующих областей опоры, обеспечивающую устойчивость устройства от опрокидывания в процессе перемещения. Такая устойчивость от опрокидывания называется статической устойчивостью и обеспечивается тем, что проекция центра тяжести устройства вдоль геодезической вертикали (совпадающей с направлением действия силы тяжести) в любой момент передвижения содержится внутри контура, соединяющего области опоры. При наличии только двух опор протяженность по крайней мере одной из опор может быть увеличена так, чтобы при замене ее отрезком прямой контур, образованный им и другой областью опоры, содержал внутри себя проекцию центра тяжести устройства вдоль вертикали.
Целесообразно общую протяженность одновременно существующих областей опоры увеличивать при перемещении устройства по склону несущей поверхности. Увеличение общей протяженности областей опоры поперек направления наибольшего склона препятствует неконтролируемому перемещению устройства при его соскальзывании со склона.
Целесообразно в случае, если несущая поверхность представляет собой поверхность цилиндрического стержня, чтобы часть тела устройства между крайними областями опоры охватывала стержень более чем на половину оборота вокруг стержня для предотвращения перемещения устройства относительно стержня под действием внешних сил.
Поставленная задача решается также тем, что в способе передвижения с опорой на несущую поверхность устройства, содержащего в качестве движителя протяженное тело, выполненное с возможностью изгибания для придания ему заданной формы, при этом длина тела между двумя его концами превышает поперечные размеры тела, включающий изгибание тела, обеспечивающее создание областей опоры устройства, в которых тело прилегает к несущей поверхности, образуя с ней неподвижный контакт, при этом создают волнообразное движение тела в виде бегущей от первого конца ко второму волны, обеспечивающее перемещение каждой области опоры вдоль несущей поверхности по мере последовательной смены в области опоры, образующих ее участков тела в направлении от первого конца ко второму, при этом до начала передвижения телу устройства придают заданную форму и создают волнообразное движение тела, обеспечивающее в процессе передвижения периодическое повторение первоначально заданной формы тела, в процессе смены в области опоры предыдущего участка тела на следующий, контакт с несущей поверхностью по меньшей мере в одной точке предыдущего участка прерывают после создания контакта в этой области опоры следующим участком тела, согласно изобретению волна, бегущая от первого конца тела ко второму концу тела, приводит области опор в движение качения колеса с радиусом кривизны, равным радиусу кривизны этой зоны тела по несущей поверхности, при этом опоры перемещают в направлении поперек направления от первого конца устройства ко второму концу устройства. Статическая устойчивость не является обязательным условием осуществимости рассматриваемого способа передвижения устройства. Примерами передвижения при невыполнении условия статической устойчивости в живой природе являются одноопорная фаза двуногой или двухопорная фаза трехногой или четырехногой ходьбы человека и животных.
Целесообразно выполнение тела устройства из скрепленных последовательно элементов, каждый из которых содержит механизм, обеспечивающий возможность сгибать элемент в заданной плоскости, при этом область опоры создают, обеспечивая прилегание к несущей поверхности по меньшей мере одного элемента, причем механизм элемента содержит по меньшей мере один гидравлический цилиндр, приводимый в движении подачей в него жидкости, содержащей взвесь ферромагнитного материала.
Далее, целесообразно, чтобы устройство содержало насос и приложенные вдоль тела устройства соединенные с насосом гибкие трубопроводы, по которым жидкость подают в гидравлические цилиндры для приведения их в движение.
Поставленная задача решается еще и тем, что в устройстве для передвижения, содержащем движитель в виде протяженного тела, длина которого между двумя его концами превышает поперечные размеры тела, включающего в себя скрепленные последовательно элементы, каждый из которых содержит механизм привода, управляющий сгибанием этого элемента в заданной плоскости и содержащий по меньшей мере один гидравлический цилиндр, заполненный для его функционирования магнитореологической жидкостью, согласно изобретению каждый из указанных элементов содержит две пластины (3, 4), соединенные между собой осевой штангой (10), с возможностью наклона их в произвольной плоскости посредством указанного механизма (2) привода, который содержит два одинаковых независимо управляемых гидравлических привода, каждый из которых содержит гидравлический цилиндр (12), закрепленный на осевой штанге (10), при этом их оси параллельны оси штанги (10) и лежат во взаимно перпендикулярных плоскостях на равных расстояниях от оси штанги (10), причем магистраль (15) от насоса и магистрали (16) - к насосу являются общими для обоих гидравлических приводов указанного механизма привода, а магнитореологическая жидкость подается постоянно в одном направлении.
В дальнейшем настоящее изобретение будет подробно рассмотрено на примерах его осуществления со ссылками на чертежи, на которых:
Фиг.1 схематически изображает элемент устройства, выполненного согласно настоящему изобретению;
Фиг.2 иллюстрирует принцип действия механизма привода элемента, показанного на Фиг.1;
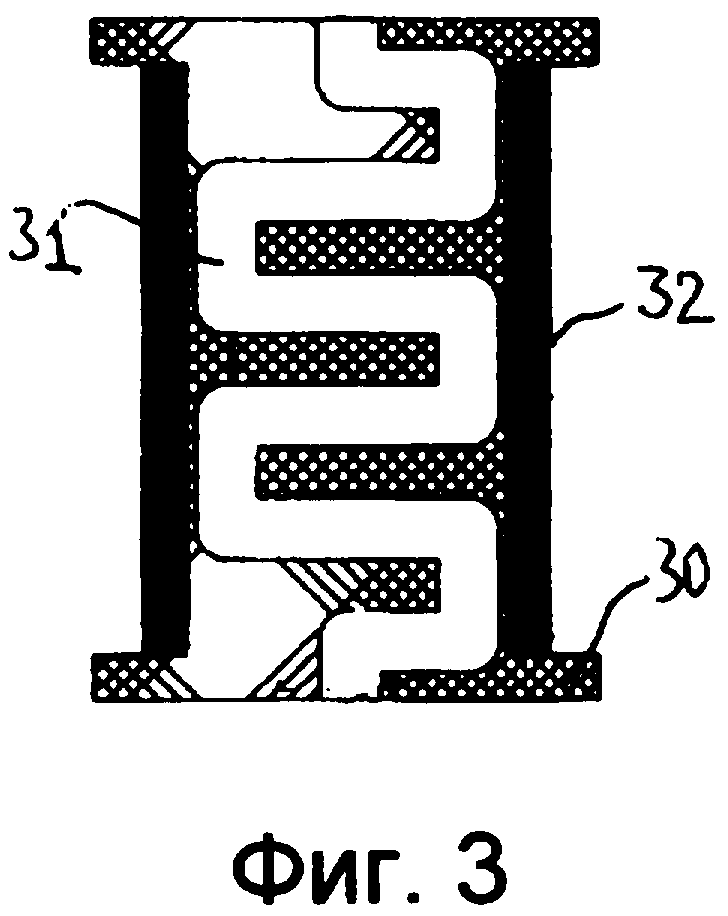
Фиг.3 изображает в разрезе дроссель гидравлического привода элемента на Фиг.1;
Фиг.4 - фрагмент устройства, выполненного из элементов на Фиг.1;
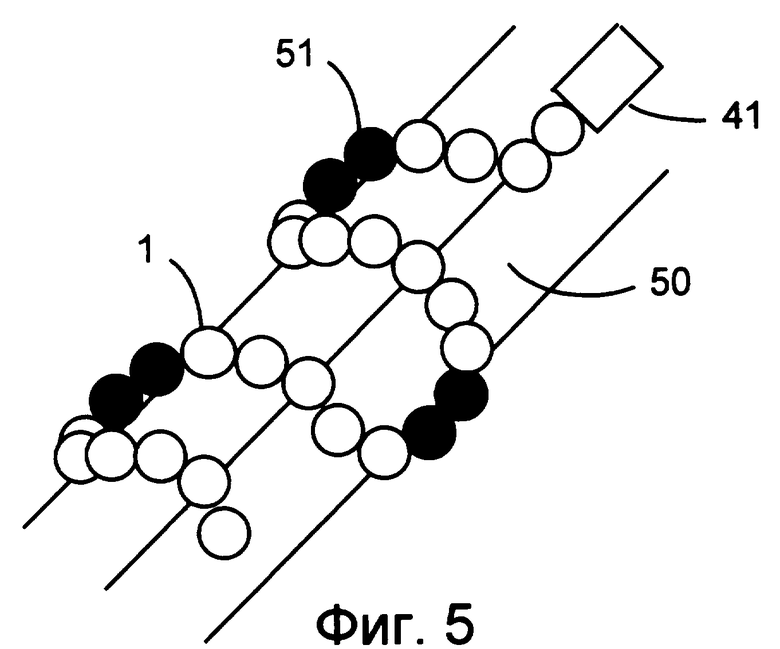
Фиг.5 - вид в перспективе устройства, показанного на Фиг.4, в процессе его передвижения согласно одной реализации способа настоящего изобретения;
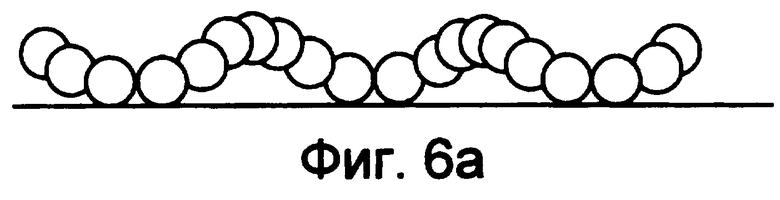
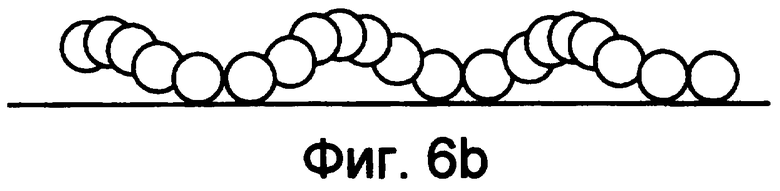
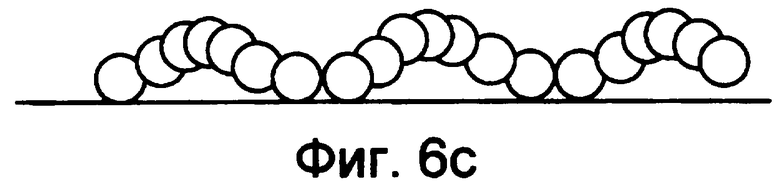
Фиг.6а-6с - устройство по Фиг.4 в последовательных фазах передвижения согласно реализации способа, иллюстрируемой Фиг.5;
Фиг.7 - схема движения по цилиндрическому стержню с предотвращающей от проскальзывания конфигурацией опор;
Фиг.8 - поясняющая Фиг.5-6 схема движения с устойчивой от опрокидывания конфигурацией опор;
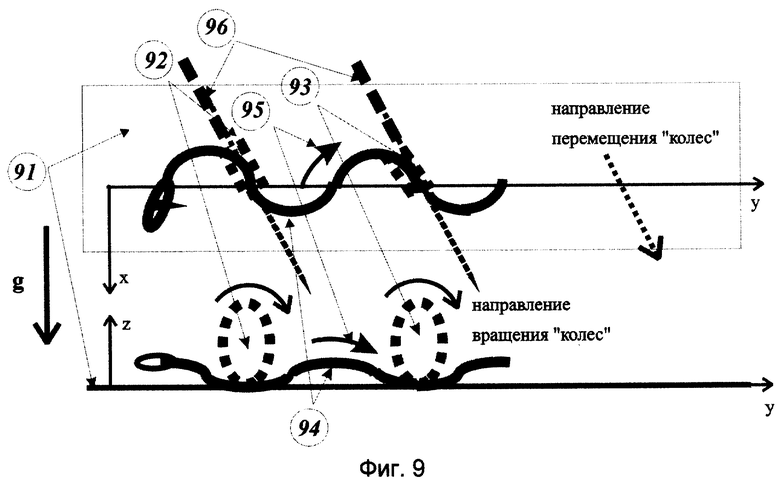
Фиг.9 - схема движения с поперечным направлению от первого конца тела ко второму перемещением опор.
Способ передвижения в соответствии с настоящим изобретением поясняется на примере устройства, выполненного из элементов, конструкцию которых иллюстрирует Фиг.1.
Элемент 1 устройства содержит механизм 2 привода, управляющий углом наклона пластин 3 и 4 по отношению друг к другу. Пластины 3, 4 выполнены из металла или твердого пластика. Пластины 3, 4 соединены металлической осевой штангой 10, неподвижно закрепленной на пластине 3 и содержащей цанговый шарнир 11, которым она соединяется с пластиной 4, что позволяет наклонять пластину 4 относительно пластины 3 в произвольной плоскости. Пластины 3, 4 содержат с наружных сторон элементы 5 крепления для жесткого соединения их последовательно друг за другом. Механизм 2 содержит два одинаковых независимо управляемых гидравлических привода, каждый из которых содержит гидравлический цилиндр 12. Гидравлические цилиндры 12 (второй гидравлический цилиндр не показан) закреплены на штанге 10 так, что их оси, параллельные оси штанги 10, лежат во взаимно перпендикулярных плоскостях на равных расстояниях от оси штанги 10. Штоки 13 поршней 14 гидравлических цилиндров шарнирно соединены с пластиной 4. Такое взаимное расположение гидравлических цилиндров 12 обеспечивает возможность наклонять пластину 4 относительно пластины 3 в заданной плоскости путем установки соответствующих положений поршней 14 гидравлических цилиндров 12 по каждой из координат. Гидравлические приводы механизма 2 приводятся в движение магнитореологической жидкостью (МРЖ), представляющей собой гидравлическую жидкость с ферромагнитными свойствами, подаваемую по магистрали 15 от гидравлического насоса (не показан) и отводимую по магистрали 16 обратно к гидравлическому насосу постоянно в одном направлении. Магистрали 15, 16 являются общими для обоих гидравлических приводов механизма 2. Положения поршней 14 гидравлических цилиндров 12 задаются путем изменения соотношения объемов МРЖ в полостях цилиндров с противоположных сторон поршней 14, куда МРЖ подается по трубопроводам 17, 18 от переключателей 20 потоков МРЖ, подводимых к гидравлическим цилиндрам 12.
Фиг.2 изображает схему переключателя 20. Одинаковые магнитные дроссели 21-24 соединены по мостовой схеме, к одной диагонали которой подключены магистрали 15, 16 от гидравлического насоса, а к другой диагонали соответственно трубопроводы 17, 18 к гидравлическому цилиндру 12 (Фиг.1). Магнитные дроссели 21-24, управляемые электрическим током, открывают и закрывают через них путь МРЖ. Особенность такой схемы состоит в том, что изменение направления движения потоков МРЖ в трубопроводах 17, 18 достигается при неизменном направлении потока МРЖ в диагонали, к которой подключены магистрали 15, 16 гидравлического насоса. Например, в гидравлическом приводе каждой из координат, при закрывании дросселей 22, 24 МРЖ, нагнетаемая в магистраль 15 через открытый дроссель 21 и трубопровод 17 поступает в левую часть гидравлического цилиндра 12 (Фиг.1). При этом МРЖ из правой части цилиндра 12 через трубопровод 18 и открытый магнитный дроссель 23 поступает в отводящую магистраль 16, в результате поршень 14 смещается вправо, выдвигая шток 13, который наклоняет пластину 4 вправо. При закрывании магнитных дросселей 21, 23, наоборот, поршень 14, смещаясь влево, в ту же сторону изменяет наклон пластины 4.
Фиг.3 изображает магнитный дроссель в разрезе. Магнитный дроссель содержит корпус 30, например, из пластика, в котором выполнен лабиринтный канал 31 для МРЖ, и индукционную катушку 32. До тех пор, пока катушка обесточена, канал 31 не представляет большого сопротивления для МРЖ, которая может протекать по каналу под действием перепада давлений. При подаче в индукционную катушку 32 управляющего тока возникающее в канале 31 магнитное поле, вступающее во взаимодействие с МРЖ, практически полностью тормозит ее протекание по каналу 31, оказывая действие, эквивалентное мгновенному многократному возрастанию вязкости жидкости.
Фиксация взаимного положения пластин 3, 4 изображенного на Фиг.1 элемента устройства достигается подачей запирающего тока в обмотки всех дросселей гидравлических приводов по каждой из координат.
Максимальный угол между пластинами 3, 4 ограничен в данном примере значением 15°, которое допускает конструкция описанного выше цангового шарнира. Однако возможно увеличение этого значения вдвое, если осевая штанга соединена цанговыми шарнирами с обеими пластинами элемента, и по каждой из координат элемент содержит два гидравлических цилиндра, работающих встречно друг другу. А также, альтернативой цанговому шарниру может быть карданный шарнир.
Таким образом, описанный элемент устройства обеспечивает возможность сгибания его на заданный угол, обеспечивая при этом жесткость по отношению ко внешним усилиям.
Фиг.4 схематически изображает соединение элементов 1 в теле устройства. Элементы жестко соединены между собой полыми штангами 40, например, из металлической трубки, закрепленными на наружных сторонах смежных пластин 3, 4 (Фиг.1). Через внутренние полости штанг 40 и внутри механизмов 2 элементов 1 проложены магистрали 15, 16 для подачи МРЖ на гидроприводы каждого элемента 1 от общего для всех элементов электрического насоса (не показан), установленного в концевом блоке 41. Кроме того, в блоке 41 установлены электронная система управления механизмами 2 элементов, электрический аккумулятор или батарея (не показаны) для питания электронного блока управления и насоса. В зависимости от назначения устройства, в концевом блоке могут быть также размещены другие технические средства, например телекамера, различные датчики, устройство радиосвязи и/или полезный груз. Концевые блоки могут быть установлены с обоих концов тела устройства. Сквозь штанги 40 от электронной системы управления пропущен электрический кабель (не показан), по которому подаются сигналы управления на переключатели 20 потоков МРЖ механизмов 2 элементов 1. Альтернативно, электрические насос и аккумулятор могут быть установлены в каждом элементе 1. В некоторых реализациях устройства может быть целесообразно снабжение электроэнергией и подачу управляющих сигналов осуществлять по кабелю извне устройства.
Элементы 1 имеют оболочки 42, показанные условно в разрезе. Оболочки 42 выполнены, предпочтительно, из эластичного материала, например резины, или пластика. В другом варианте реализации, устройство содержит общую для всех элементов трубчатую оболочку, выполненную из эластичного материала.
Минимальное количество элементов, необходимое для передвижения по способу настоящего изобретения, не превосходит одного десятка, однако предпочтительным является количество элементов в несколько десятков. Большее количество элементов позволяет реализовать квазинепрерывное устройство, однако, увеличение количества элементов в устройстве приводит к его удорожанию.
Фиг.5 иллюстрирует способ передвижения, осуществляемого согласно настоящему изобретению, на примере устройства, изображенного на Фиг.4. Устройство передвигается по горизонтальной поверхности 50, опираясь на нее в областях опоры 51, начальное расположение и количество которых определяются исходной формой устройства. Образующие области опоры 51 элементы, прилегающие к поверхности 50, условно выделены черным.
Для передвижения устройства создают бегущую вдоль тела устройства волну путем подачи соответствующей последовательности управляющих электрических сигналов на механизмы 2 элементов 1 (Фиг.4). Волна, бегущая от первого конца, условно "хвоста", тела ко второму концу, "голове", приводит зоны тела, содержащие области опоры 51, в движение, ближайшей аналогией которому является качение по поверхности 50 колеса с радиусом, равным радиусу кривизны этой зоны тела. Бегущая волна заставляет элементы, смежные с областями опоры 51 со стороны второго конца, последовательно прилегать к поверхности 50, что приводит к перемещению передних краев областей опор вдоль поверхности 50. В то же время элементы, оказывающиеся на краях областей опоры со стороны первого конца тела, последовательно отстраняются от поверхности 50 и выходят из контакта с ней, тем самым также перемещая задний край области опоры. Направление перемещения областей опор, задаваемое с помощью управляющих механизмами элементов сигналов, определяет направление передвижения всего устройства. Если последовательность управляющих сигналов изменяется на обратную, то это приводит к изменению направления бегущей волны и соответственно изменению направления передвижения устройства на противоположное. Может быть задано также любое другое направление перемещения устройства, в частности области опоры можно перемещать в направлении поперек направления от первого конца ко второму, задавая этим передвижение устройства в поперечном направлении.
Настоящий способ передвижения обладает значительными преимуществами по сравнению с известными из уровня техники способами передвижения змееподобных роботов, так как может, с одной стороны, обеспечить высокую скорость передвижения, а с другой - является экономичным, поскольку тело устройства в любой момент передвижения находится в неподвижном контакте с несущей поверхностью.
При передвижении устройства по горизонтальной поверхности, в отличие от передвижения внутри трубы с опорой на ее противоположные стенки, существенным является вопрос поддержания равновесия устройства и предотвращения неконтролируемого движения при падении набок. Для сохранения устойчивости устройства требуется, чтобы в любой фазе передвижения проекция вдоль вертикали центра тяжести устройства на несущую поверхность лежала внутри контура, соединяющего области опоры. Обычно это обеспечивается, если области опоры не лежат на одной прямой, например устройство, у которого области опоры расположены так, как на Фиг.5, - устойчиво. Устойчивость устройства может быть обеспечена, в том числе, и в случае только двух, существующих одновременно областей опоры, при условии достаточной протяженности по меньшей мере одной из них.
Фиг.6а-6с иллюстрируют последовательность фаз прямолинейного передвижения устройства по горизонтальной поверхности.
Фиг.6а изображает самую раннюю фазу. Фиг.6b - фазу со сдвигом в два элемента по отношению к первой. В этой фазе элементы, за исключением пар крайних с обоих концов тела, занимают положения предшествующих им через один со стороны первого конца в фазе на Фиг.6а. На Фиг.6с изображена фаза со сдвигом еще на два элемента - самая поздняя из трех. Когда одинаковые управляющие сигналы подаются последовательно на механизмы 2 следующих друг за другом элементов 1 в направлении создаваемой бегущей волны, это обеспечивает прямолинейное перемещение каждой из областей опоры по поверхности 50 до их поочередного исчезновения по достижении второго (переднего) конца тела устройства. Одновременно с этим, вследствие стереотипного изгибания тела, со стороны первого (заднего) конца появляются новые области опоры, при этом периодически повторяется исходная форма тела, которая была ему придана в начале передвижения.
На Фиг.8 изображена поясняющая Фиг.5-6 схема движения с устойчивой от опрокидывания конфигурацией опор. Одновременно изображены вид сверху и вид сбоку протяженного устройства, изображенного пространственной кривой (85), описывающей мгновенную форму бегущей волны, опирающейся опорами (82), (83), (84) на поверхность (81), при этом для бегущей вдоль тела слева направо (86) волны создается согласованное качение виртуальных "колес" (82), (83), (84), оставляющих след (87) в виде полос.
На Фиг.9 изображена схема движения с поперечным направлению от первого конца тела ко второму перемещением опор. Одновременно изображены вид сверху и вид сбоку протяженного устройства, изображенного кривой (94), описывающей мгновенную форму бегущей волны, опирающегося опорами (виртуальными "колесами") (92), (93) на поверхность (91), при этом для бегущей вдоль тела слева направо (95) волны создается согласованное качение виртуальных "колес" (92), (93), оставляющих след (96) в виде полос длиной, равной длине тела движителя.
В случае неровной поверхности целесообразно отступление от простейшего стереотипа передвижения. В частности, при передвижении по склону или по вязкому грунту вводят изменения в периодически повторяемую форму устройства, обеспечивающие увеличение суммарной протяженности областей опор для увеличения трения, чтобы предотвратить соскальзывание устройства со склона или уменьшить нагрузку на единицу площади опоры, при этом в опоре образуется сильно деформируемое в процессе перемещения колесо, т.е. гусеница.
Возможен выбор стратегии движения по склону, когда направление перемещения опоры при прохождении волны от одного конца устройства перпендикулярно линии наибольшего склона, при этом следы выстраиваются в виде параллельных ступеней шириной, равной длине тела устройства, участвующего в образовании опор.
Способ обеспечивает также передвижение устройства по цилиндрическому стержню, в частности, расположенному вертикально. Особенностью этой реализации является выполнение условия, чтобы тело устройства в областях опоры плотно охватывало стержень. Это условие выполняется, если часть тела между двумя крайними областями опоры охватывает стержень более чем на половину оборота вокруг стержня.
На Фиг.7 изображены две проекции цилиндрического стержня (72) и гибкого тела (71), плотно прилегающего в точках опоры к стержню, так чтобы создать прижим, обеспечивающий качение виртуальных колес (73) без проскальзывания, и удержать тело на стержне.
Настоящий способ передвижения может с успехом быть применен и на других несущих поверхностях, в частности при передвижении внутри труб, диаметр которых превышает поперечные размеры тела устройства.
Присутствующие во всех вариантах способа передвижения устройства ключевые признаки, а именно волнообразное змеевидное движение и качение деформируемого колеса в области контакта тела устройства и несущей поверхности, дают основание называть предлагаемый в изобретении способ - "Змеиное колесо".
Для бегущей волны, распространяющейся вдоль гибкого непрерывного тела, одновременная реализация признаков мгновенной неподвижности изолированной области опоры (качение фрагментов тела, образующих опоры) и расположение опор таким образом, чтобы проекция центра тяжести устройства вдоль геодезической вертикали находилась внутри контура, связывающего области опор, возможна только при условии, что в каждый момент времени точки волны (кривой, изображающей мгновенную форму волны) не лежат в одной плоскости.
Для способа передвижения устройства с поперечным направлению от одного конца устройства к другому перемещением областей опор, находящихся в мгновенно неподвижном контакте с опорной поверхностью, условие "точки волны (кривой, изображающей мгновенную форму волны) не лежат в одной плоскости" является также объединяющим признаком.
Таким образом, для всех предлагаемых вариантов способа передвижения мгновенная форма волны должна описываться пространственной кривой.
Для осуществимости способа передвижения "Змеиное колесо" может быть указан следующий признак: кривая, описывающая мгновенную форму бегущей вдоль тела устройства волны изгибаний, является пространственной, а движение помещенных в областях опор виртуальных колес, является кинематически совместимым с мгновенным движением твердого тела, опирающегося на эти колеса.
Изложенное выше описание примеров осуществления изобретения предназначено исключительно для целей иллюстрации настоящего изобретения, объем которого определяется его формулой, приведенной ниже.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) И СПОСОБ ЕГО ПЕРЕДВИЖЕНИЯ | 2005 |
|
RU2278053C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ЕГО ПЕРЕДВИЖЕНИЯ | 2008 |
|
RU2369514C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДАЧИ МАТЕРИАЛОВ | 2001 |
|
RU2278299C2 |
| СЕКЦИЯ БЕЗРАЗГРУЗОЧНОЙ КРЕПИ | 1997 |
|
RU2116456C1 |
| ШАГАЮЩИЙ РОБОТ-НАНОПОЗИЦИОНЕР И СПОСОБ УПРАВЛЕНИЯ ЕГО ПЕРЕДВИЖЕНИЕМ | 2010 |
|
RU2540283C2 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2003 |
|
RU2236673C1 |
| Способ изготовления литого микропровода | 1986 |
|
SU1385145A1 |
| УСТАНОВКА ДЛЯ ОПРЕДЕЛЕНИЯ РЕОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК ДОРОЖНО-СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ | 2020 |
|
RU2745536C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МЕТОДА МАГНИТНОГО КОНТРОЛЯ | 2017 |
|
RU2684949C1 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2029685C1 |




Изобретение относится к области механических движителей, и, в частности, к способам передвижения кинематически избыточных многоэлементных роботов, имеющих цепочную структуру. Способ передвижения устройства, содержащего в качестве движителя протяженное тело, выполненное с возможностью изгибания для придания ему заданной формы, включает изгибание тела, обеспечивающее создание областей опоры устройства, в которых тело прилегает к несущей поверхности, образуя с ней неподвижный контакт. Для передвижения устройства создают волнообразное движение тела в виде бегущей от его первого конца ко второму волны, обеспечивающее перемещение каждой области опоры вдоль тела по мере последовательной смены в области опоры предыдущего участка тела на следующий за ним, так же, как это происходит у катящегося колеса. Возможно перемещение опор в направлении поперек перемещения устройства. Опоры образуют контур, внутри которого находится центр тяжести устройства. Технический результат - экономичность в отношении затрат энергии в сочетании с высокой проходимостью и устойчивостью устройства в процессе передвижения по различным поверхностям. 3 с. и 8 з.п. ф-лы, 11 ил.

| Способ передвижения гибкого тела поОпОРНОй пОВЕРХНОСТи | 1976 |
|
SU821281A1 |
| Инерционно-импульсное транспортное средство | 1975 |
|
SU908645A1 |
| Кольцевая пятикавдерная печь для обжига кирпича | 1929 |
|
SU19517A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО НАРУЖНЫМ ПОВЕРХНОСТЯМ ТРУБОПРОВОДОВ | 1991 |
|
RU2023619C1 |
| УЗЕЛ ДЛЯ РАЗРЕЗАНИЯ И ОЧИСТКИ ОТ СОДЕРЖИМОГО МЫШЕЧНЫХ ЖЕЛУДКОВ ПТИЦЫ | 2005 |
|
RU2295865C1 |
| СПОСОБ ПРОИЗВОДСТВА ШЕСТИГРАННЫХ ТРУБ-ЗАГОТОВОК РАЗМЕРОМ "ПОД КЛЮЧ" 255±2,0×5,0+1,5/-1,0×4300+80/-30 мм ДЛЯ УПЛОТНЕННОГО ХРАНЕНИЯ И ТРАНСПОРТИРОВКИ ОТРАБОТАННОГО ЯДЕРНОГО ТОПЛИВА | 2013 |
|
RU2557383C2 |
| WO 00/10073 А1, 24.02.2000 | |||
| ГИДРОЦИЛИНДР | 0 |
|
SU305299A1 |

