Область техники, к которой относится изобретение
Изобретение относится к радиотехнике и может использоваться в системах инструментального обеспечения захода самолетов на посадку в тех ситуациях, когда заход по стандартной глиссаде с углом глиссады в пределах от 2 до 4 по тем или иным причинам оказывается невозможным. В частности, глиссадный радиомаяк для захода на посадку по крутой траектории найдет применение на аэродромах военной авиации при выполнении упражнений по снижению с позиции, расположенной на большой высоте и небольшом расстоянии от торца взлетно-посадочной полосы.
Уровень техники
Основным средством обеспечения инструментального захода самолетов гражданской и государственной авиации на посадку и посадки являются радиомаячные системы посадки (СП) метрового диапазона длин волн (MB) формата ILS (Instrument Landing System) и дециметрового диапазона длин волн (ПРМГ). Радиомаячные системы посадки имеют почти вековую историю развития. История развития СП в США описана в [Watts, С. В., Jr. Instrument Landing Scrapbook / С.В., Jr. Watts. - Trafford Publishing, 2005. 392 p.p.]. Основные вехи развития СП MB для гражданской авиации и СП дециметрового диапазона длин волн для военной авиации в нашей стране освещены в [НИИ-33 / ВНИИРА. История становления и развития Всесоюзного НИИ радиоаппаратуры - СПб.: 2007. - 291 с.].
Радиомаячная СП включает в себя курсовой радиомаяк (КРМ), глиссадный радиомаяк (ГРМ), маркерные радиомаяки или дальномерное оборудование (DME).
Системы инструментальной посадки самолетов метрового диапазона волн (Instrument landing systems - ILS) развивались до и после 1946 года, когда ILS была принята в качестве международного стандарта и могла быть категорирована в одной из трех групп: с опорным нулем, системой на боковой полосе или системой с решеткой типа М.
ГРМ устанавливают в точке, расположенной на расстоянии 200-400 м от порога взлетно-посадочной полосы (ВПП) и на удалении 150-180 м от оси ВПП. Антенна ГРМ ILS излучает в окружающее пространство электромагнитные волны в диапазоне частот 328-335 МГц, модулированные по амплитуде сигналами тональных частот ƒ1=90 Гц, ƒ2=150 Гц. Поверхность, на которой разность глубин модуляции (РГМ) сигналами ƒ1 и ƒ2 равна нулю, называют поверхностью глиссады. Линию пересечения поверхности глиссады с вертикальной плоскостью, формируемой КРМ и проходящей через ось взлетно-посадочной полосы, называют глиссадой.
Самым простым ГРМ в названных выше системах является ГРМ с опорным нулем. Он включает в себя две антенны, причем нижняя антенна расположена на высоте в два раза меньшей, чем высота верхней антенны. Нижняя антенна излучает так называемый опорный сигнал, модулированный с равной глубиной модуляции тонами 90 и 150 Гц с фазовой синхронизацией (называемый также суммарным сигналом или сигналом "несущая плюс боковые частоты"). Нижняя антенна с учетом влияния Земли формирует в вертикальной плоскости лепестковую диаграмму направленности с первым максимумом над Землей под углом 3° и первым нулем под углом 6°. Верхняя антенна излучает только сигнал боковой полосы 90 и 150 Гц (называемый разностным сигналом или сигналом "боковые частоты") и формирует (с учетом радиоволн, отраженных от поверхности Земли) лепестковую диаграмму направленности с первым максимумом под углом 1,5° и первым нулем под углом 3°. Этот первый нуль сигнала "боковых частот" под углом 3° задает угол глиссады θгл. Ширина зоны глиссады формируется в окрестности упомянутого нуля в диаграмме направленности. Сигналы фазируют таким образом, что сигнал "боковых частот", излучаемый верхней антенной, и опорный сигнал "несущая плюс боковые частоты" (опорный сигнал), излучаемый нижней антенной, суммируются так, что ниже угла глиссады преобладает модуляция сигналом тональной частоты 150 Гц, а выше ее, по крайней мере, до угла, составляющего 1,75θгл, преобладает модуляция сигналом тональной частоты 90 Гц. Таким образом, радиотехническая траектория, называемая глиссадой, формируется в зоне сигнала высокой интенсивности, а приемник просто разделяет и сравнивает звуковые тоны.
Система с нулевой зоной обычно требует наличия ровной плоскости перед ГРМ длиной 800 м для угла глиссады 3°, а поскольку уровень в диаграмме направленности боковой полосы растет от 0° почти линейно, то система очень чувствительна к отражениям радиоволн от неровностей Земли.
Глиссадные площадки редко бывают идеальными, антенны часто должны работать при наличии короткой площадки перед ГРМ или при наличии складок рельефа местности в зоне захода самолета на посадку. Любое из этих неблагоприятных условий может сильно ухудшить рабочие характеристики системы с нулевой зоной.
Кроме того, в процессе эксплуатации первых радиомаячных СП была обнаружена связь между точностными характеристиками СП и размерами и расположением складок местности в зоне захода самолетов на посадку.
Естественным стремлением разработчиков радиомаячных систем решить проблему влияния рельефа местности в зоне захода самолетов на посадку на поведение глиссады было сужение диаграммы направленности (ДН) антенны ГРМ в вертикальной плоскости, при котором складки местности не облучались бы сигналами ГРМ. Однако, оказалось, что пилоту трудно попасть в узкую зону. Международной организацией гражданской авиации (ИКАО) установлены минимальные угловые размеры зоны действия системы ILS. В частности, ГРМ должен излучать сигналы, обеспечивающие удовлетворительную работу типового бортового оборудования в вертикальном секторе с верхней границей под углом 1,75θгл и нижней границей под углом 0,45θгл относительно горизонтальной плоскости или под меньшим углом до 0,3θгл, который требуется для гарантированного выполнения объявленной схемы входа в глиссаду ILS [пункт 3.1.5.3.1 в Приложении 10 к Конвенции о международной гражданской авиации. Авиационная электросвязь. Том 1. Радионавигационные средства. ИКАО, Монреаль (Канада), 2006. - 606 с.].
Проблема обеспечения, с одной стороны, высокой точности задания траектории полета путем сужения ДН антенн и, с другой стороны, широких зон действия КРМ и ГРМ была решена в радиомаяках с двухчастотным режимом работы. При этом используется так называемый "эффект захвата" (capture effect). Двухчастотный режим ILS предполагает формирование двух высокочастотных сигналов: основного - сигнала узкого канала (УК) и дополнительного - сигнала широкого канала (ШК). Задачей УК является формирование узких угловых зон: зоны глиссады в пределах ±0,45θгл. В этих зонах задается линейная зависимость между величиной информационного параметра РГМ и угловым отклонением самолета от заданной траектории. Широкий канал обеспечивает пилота информацией во всей остальной зоне действия, "указывая" направление "правильного " движения к траектории снижения. При этом несущая частота сигнала ШК смещена относительно частоты сигнала УК на ±(5÷15) кГц.
Путем формирования ДН специальной формы добиваются существенного превышения уровня сигналов УК по сравнению с уровнем сигналов ШК в пределах узкой зоны и существенного превышения уровня сигналов ШК по сравнению с уровнем сигналов УК в пределах зоны наведения: θ≤0,45θгл.
В бортовой же аппаратуре реализован "режим захвата", заключающийся в том, что аппаратура выделяет сигнал с большей амплитудой. В результате в узком секторе углов в направлении продолжения оси ВПП самолет ориентируется по сигналам УК, а за его пределами - по сигналам ШК.
Для излучения сигналов УК и ШК в ГРМ стали использовать одну и ту же антенную решетку (АР), так называемую антенную решетку типа М. Тогда в составе двухчастотного ГРМ оказалось устройство распределения мощности сигналов узкого и широкого каналов, которое позволило одной и той же АР излучать одновременно сигналы УК и ШК.
Итак, известен первый ГРМ дециметрового диапазона волн с опорным нулем [Г.А. Пахолков, В.В. Кашинов и др. "Угломерные радиотехнические системы посадки". - М.: Транспорт. - 1982, стр. 18], содержащий устройство формирования сигнала суммарного канала, устройство формирования сигналов разностного канала, первую и вторую антенны, разнесенные по вертикали, причем нижняя антенна запитана сигналами суммарного канала, а верхняя антенна запитана сигналами разностного канала. Под сигналом суммарного канала понимается сигнал, формируемый при модуляции высокочастотных колебаний колебаниями с тональными частотами Ω1 и Ω2, одинаковыми по амплитуде, при этом колебания Ω1 и Ω2 синфазны между собой. Под сигналами разностного канала подразумеваются сигналы боковых частот, формируемых при модуляции высокочастотных колебаний колебаниями с частотами Ω1 и Ω2, одинаковыми по амплитуде, при этом высокочастотные колебания имеют сдвиг по фазе на 180°. (В системах посадки метрового диапазона в спектр сигналов суммарного канала входит несущая частота). Информационным параметром в системах посадки метрового диапазона волн является разность глубин модуляции (РГМ) излучаемого сигнала колебаниями с частотами Ω1 и Ω2, а в системах посадки дециметрового диапазона волн так называемый коэффициент разнослышимости сигналов (КРС) с частотами модуляции Ω1 и Ω2.
ГРМ с опорным нулем является наиболее простым типом ГРМ, он нашел широкое применение на аэродромах гражданской и военной авиации.
Известен второй ГРМ дециметрового диапазона длин волн, входящий в посадочную радиомаячную группу (ПРМГ) ПРМГ-76УМ, выпускаемую АО "Челябинский радиозавод "Полет" и эксплуатируемый на аэродромах государственной авиации и на аэродромах совместного базирования гражданской и государственной авиации.
Известный второй ГРМ содержит последовательно соединенные генератор высокочастотных колебаний, ключ и делитель, первый, второй и третий генераторы прямоугольных колебаний, первый переключатель с первым и вторым сигнальными входами, управляющим входом и выходом, фазовращатель на 180°, второй переключатель с первым и вторым сигнальными входами, управляющим входом и выходом, первую и вторую антенны. Выходы первого и второго генераторов прямоугольных колебаний соединены с сигнальными входами первого переключателя. Выход третьего генератора прямоугольных колебаний соединен с управляющим входом первого переключателя и с управляющим входом второго переключателя. Первый выход первого делителя соединен с первым входом второго переключателя и с фазовращателем на 180°, выход которого соединен со вторым входом второго переключателя. Выход второго переключателя соединен с первой антенной. Второй выход первого делителя соединен со второй антенной. Высоты подвеса относительно поверхности Земли h1 и h2 первой и второй антенн равны  и
и  , где λ - длина волны, θгл - угол глиссады.
, где λ - длина волны, θгл - угол глиссады.
Известны другие технические решения, предназначенные для обеспечения работы ГРМ на аэродромах с изменяющимся уровнем снежного покрова, представленные в авторских свидетельствах СССР на изобретения и патентах РФ на изобретение:
А.с. №711845. - 2591230. Приоритет 20.03.78. Зарегистр. 28.09.79;
А.с. №1396781. - 4125531. Приоритет 30.09.86. Зарегистр. 15.01.88;
А.с. №1426260. - 4125479. Приоритет 30.09.86. Зарегистр. 22.05.88;
А.с. №275692. - 3163500. Приоритет 11.02.87. Зарегистр. 01.06.88;
А.с. №287782. - 3195405. Приоритет 31.03.88. Зарегистр. 02.01.89);
А.с. №1623443. - 4619435/24-09, Приоритет 13.12.88. Зарегистр. 22.09.90;
А.с. №1626884. - №4619434/09. Приоритет 13.12.88. Зарегистр. 08.10.90;
А.с. №1690468. - 4619436/09, Приоритет 13.12.88. Зарегистр. 08.07.91;
А.с. №1690469. - 4619436/09. Приоритет 13.12.88. Зарегистр. 08.07.91;
А.с. №1695758. - 4731827/09. Приоритет 22.08.89. Зарегистр. 01.08.91;
А.с. №1715060. - 4673557/09. Приоритет 04.04.89. Зарегистр. 22.10.91;
А.с. №1730923. - 4731828/09, Приоритет 22.08.89. Зарегистр. 03.01.92;
А.с. №1734471. - 4673558/09. Приоритет 04.04.89. Зарегистр. 15.01.92;
А.с. №1752075. - 4756469/22. Приоритет 01.11.89. Зарегистр. 26.11.92;
А.с. №1785350. - 4755385/22, Приоритет 01.11.89. Зарегистр. 01.09.92;
А.с. №1802602. - 4873721/09, Приоритет 11.10.90. Зарегистр. 09.10.92;
А.с. №1822264. - 4870495/09. Приоритет 1.10.90. Зарегистр. 12.10.92;
А.с. №1822265. - 4887243/09, Приоритет 28.11.90. Зарегистр. 12.10.92;
А.с. №1828278. - 4809235/09, Приоритет 02.04.90. Зарегистр. 12.10.92;
Патент РФ №21222216. - 94032782, Приоритет 08.09.94. Зарегистр. 20.11.98.
Известны также патент Alfred R. Lopez. Non-imaging glideslope antenna systems (US patent №5546095, опубл. 13.08.1996, Int. CL6 H01Q 3/30, H01Q 21/10) и австралийский патент №1545035, Application №44640/77, Instrument landing system glide path antenna array and drive therefor [Australia №8121/76, filed 12 Nov. 1976; Int. CL2 G01S 1/18].
Их общим недостатком является маленький сектор наведения в вертикальной плоскости.
Существует ряд ситуаций, когда требуется осуществить заход на посадку по крутой траектории. При этом экипаж самолета, находясь на позиции, расположенной на большой высоте и на небольшом расстоянии от торца взлетно-посадочной полосы (ВПП), прибегает к пологому пикированию с выводом самолета в районе ближнего привода в предпосадочный режим полета по глиссаде [Курс боевой подготовки оперативно-тактической авиации «КБП ОТА - 2012». - М.: Военное издательство. - 2014 г.
(Упр. №601)]. Например, вхождение в пикирование выполняют из точки, находящейся на высоте 3000 м над дальним приводом (т.е. на удалении 4000 м от торца ВПП). Таким образом, начальная точка снижения самолета может находиться относительно глиссадного радиомаяков под углом места около 40°. Однако верхняя граница зоны действия ПРМГ-76УМ составляет для КРМ на всех аэродромах угол 7°, а для ГРМ на разных аэродромах угол 3,5°÷7° (величина утла верхней границы зоны действия в 1,75 раза больше установленного угла глиссады, который может быть выбран в пределах от 2° до 4°). В результате, при таком заходе на посадку экипаж самолета на большей части траектории полета лишен приборной информации о своем положении относительно глиссады.
В связи с этим представляется актуальной разработка модификации ГРМ с целью обеспечения экипажей самолета приборной информацией о его месте нахождении относительно глиссады на всей упомянутой траектории снижения. При этом в районе ближнего приводного радиомаяка должна обеспечиваться возможность плавного вхождения в стандартную зону глиссады с целью ручного или инструментального выполнения последующих операций по посадке самолета.
В качестве прототипа авторами выбран второй известный ГРМ.
Раскрытие изобретения
Технический результат изобретения направлен на расширение зоны действия ГРМ в вертикальной плоскости для обеспечения захода самолетов на посадку по крутой траектории.
В первом варианте ГРМ для обеспечения инструментального захода самолетов на посадку по крутой траектории технический результат достигается тем, что ГРМ, содержащий последовательно соединенные первый генератор высокочастотных колебаний с частотой ω1, первый ключ и первый делитель, первый, второй и третий генераторы прямоугольных колебаний, первый переключатель с первым и вторым сигнальными входами, управляющим входом и выходом, первый фазовращатель на 180°, второй переключатель с первым и вторым сигнальными входами, управляющим входом и выходом, первую антенну и вторую 11 антенну, дополнительно содержит второй делитель с первым и вторым выходами, сумматор с первым и вторым входами, второй генератор высокочастотных колебаний с частотой ω2, второй ключ, третий переключатель с сигнальным входом, управляющим входом и с первым и вторым выходами, аттенюатор, третий делитель, второй фазовращатель на 180° и третью антенну. При этом выходы первого и второго генераторов прямоугольных колебаний соединены с первым и вторым сигнальными входами первого переключателя. Выход третьего генератора прямоугольных колебаний соединен с управляющим входом первого переключателя и управляющим входом второго переключателя. Выход первого переключателя соединен с входом второго делителя, первый выход которого соединен с управляющим входом первого ключа. Первый выход первого делителя мощности соединен с первым входом второго переключателя и с первым фазовращателем на 180°, выход которого соединен со вторым входом второго переключателя. Выход второго переключателя соединен с первой антенной 10. Второй выход первого делителя соединен с первым входом сумматора, выход которого соединен со второй антенной. Второй генератор высокочастотных колебаний соединен со вторым ключом, выход которого соединен с сигнальным входом третьего переключателя. Управляющий вход второго ключа соединен со вторым выходом второго делителя. Управляющий вход третьего переключателя соединен с третьим генератором прямоугольных колебаний. Первый выход третьего переключателя соединен с входом третьего делителя, второй выход третьего переключателя соединен с аттенюатором, выход которого соединен с входом третьего делителя. Первый выход третьего делителя соединен последовательно со вторым фазовращателем на 180° и со вторым входом сумматора, а второй выход третьего делителя соединен с третьей антенной. Высоты подвеса относительно поверхности Земли h1 и h2 первой и второй антенн равны  и
и  , где λ - длина волны, θгл - угол глиссады. Высота подвеса третьей антенны меньше высоты подвеса второй антенны.
, где λ - длина волны, θгл - угол глиссады. Высота подвеса третьей антенны меньше высоты подвеса второй антенны.
Применение в составе ГРМ второго генератора высокочастотных колебаний с частотой ω2, отличающейся от частоты ω1 первого генератора, третьей антенны, расположенной ниже второй антенны, и упомянутых дополнительных элементов фидерного тракта, формирующих диаграмму направленности излучения для сигналов на частоте ω2 в вертикальной плоскости с широким лепестком, в котором имеется интерференционный минимум на угле глиссады, позволило создать широкую зону действия ГРМ в вертикальной плоскости. При этом ниже угла глиссады преобладает тон с частотой 2100 Гц, а выше угла глиссады преобладает тон 1300 Гц.
Во втором варианте ГРМ для обеспечения инструментального захода самолетов на посадку по крутой траектории технический результат достигается тем, что ГРМ, содержащий последовательно соединенные генератор высокочастотных колебаний, первый ключ, первый делитель с первым и вторым выходами, первый, второй и третий генераторы прямоугольных колебаний, первый переключатель с первым и вторым сигнальными входами, управляющим входом и выходом, первый фазовращатель на 180°, второй переключатель с первым и вторым входами, управляющим входом и выходом, первую и вторую антенны, дополнительно содержит второй делитель с первым и вторым выходами, первый сумматор с первым и вторым входами и выходом, третий делитель с первым и вторым выходами, второй сумматор с первым и вторым входами и выходом, третий переключатель с первым и вторым сигнальными входами, управляющим входом и выходом, второй фазовращатель на 180°, третий делитель с входом и первым и вторым выходами, третий фазовращатель на 180°, третью антенну, линию задержки. При этом выходы первого и второго генераторов прямоугольных колебаний соединены с первым и вторым сигнальными входами первого переключателя, соответственно, выход третьего генератора прямоугольных колебаний соединен с управляющим входом первого переключателя, с управляющим входом второго переключателя. Первый выход делителя соединен с первым входом второго переключателя и с первым фазовращателем на 180°, выход которого соединен со вторым входом второго переключателя, выход второго переключателя соединен с входом второго 12 делителя, первый выход которого соединен с входом первой антенны, а второй - соединен с первым входом первого сумматора. Второй выход первого делителя соединен с входом третьего делителя, первый выход которого соединен с первым входом второго сумматора, а второй выход соединен со вторым входом первого сумматора, выход второго сумматора соединен с входом второй антенны. Выход первого сумматора соединен с первым сигнальным входом третьего переключателя и вторым фазовращателем, выход которого соединен со вторым сигнальным входом третьего переключателя. Выход третьего переключателя соединен с входом третьего делителя, первый выход которого последовательно соединен с третьим фазовращателем на 180° и вторым входом второго сумматора, а второй выход соединен с третьей антенной. Управляющий вход третьего переключателя последовательно соединен с линией задержки и третьим генератором прямоугольных колебаний, причем высоты подвеса относительно поверхности Земли первой h1 и второй h2 антенн равны  и
и  , где λ - длина волны, θгл - угол глиссады, а высота подвеса третьей антенны ниже высоты подвеса второй антенны.
, где λ - длина волны, θгл - угол глиссады, а высота подвеса третьей антенны ниже высоты подвеса второй антенны.
Применение упомянутых дополнительных элементов фидерного тракта позволило реализовать деление сигнала высокочастотного генератора на два канала. Сигналы первого канала формируют "традиционную" зону глиссады. Сигналы второго канала подвергаются фазовой манипуляции, что обеспечивает некогерентное сложение в пространстве сигналов первого и второго каналов. Сигналы второго канала формируют широкую в вертикальной плоскости диаграмму направленности с минимумом на угле глиссады. С учетом "эффекта захвата", происходящего в бортовом приемнике, наблюдается характеристика глиссады, практически совпадающая с традиционной характеристикой прототипа и продолженная до больших углов места за счет излучения второй и третьей антеннами сигналов второго канала.
Решение этих и других задач поясняется далее текстом и рисунками на фигурах.
Краткое описание чертежей
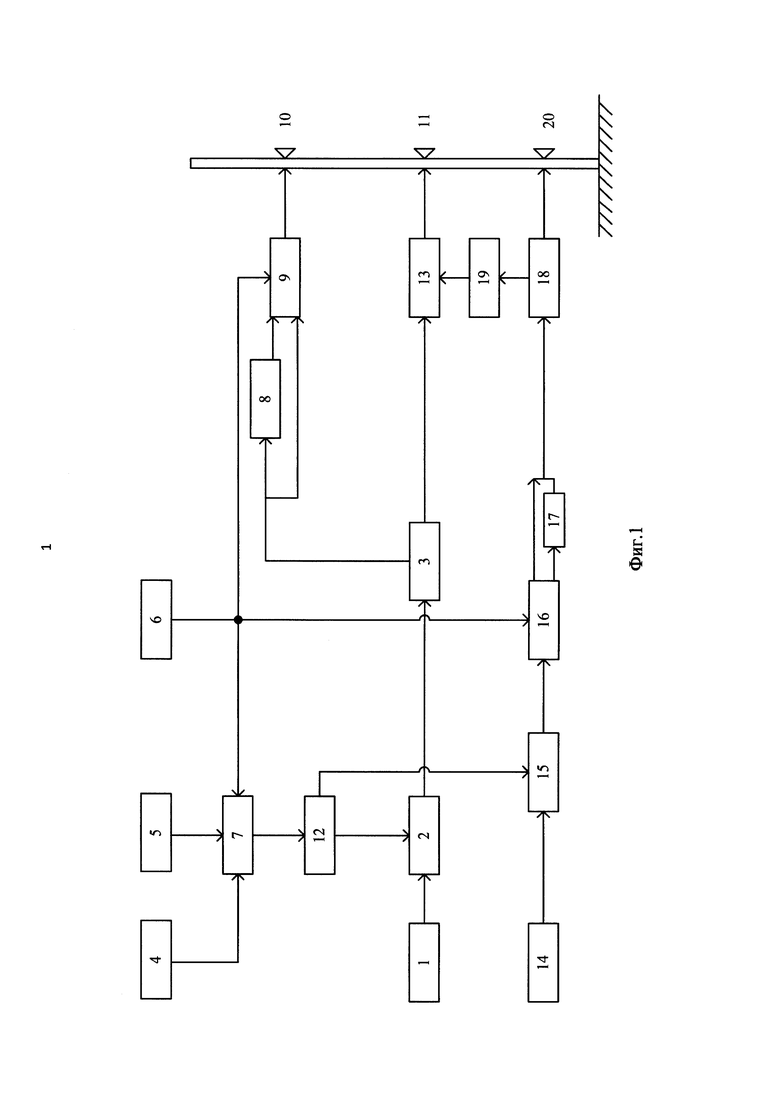
На фиг. 1 представлена структурная электрическая схема первого варианта глиссадного радиомаяка для обеспечения инструментального захода самолетов на посадку по крутой траектории в соответствии с настоящим изобретением. На фиг. 1 введены следующие обозначения:
1 - первый генератор высокочастотных колебаний с частотой ω1,
2 - первый ключ с сигнальным входом, управляющим входом и выходом,
3 - первый делитель с первым и вторым выходами,
4 - первый генератор прямоугольных колебаний,
5 - второй генератор прямоугольных колебаний,
6 - третий генератор прямоугольных колебаний,
7 - первый переключатель с первым и вторым сигнальными входами, управляющим входом и выходом,
8 - первый фазовращатель на 180°,
9 - второй переключатель с первым и вторым сигнальными входами, управляющим входом и выходом,
10 - первая антенна,
11 - вторая антенна,
12 - второй делитель с первым и вторым выходами,
13 - сумматор,
14 - второй генератор высокочастотных колебаний с частотой ω2,
15 - второй ключ с сигнальным входом, управляющим входом и выходом,
16 - третий переключатель с сигнальным входом, управляющим входом и двумя выходами,
17 - аттенюатор,
18 - третий делитель с первым и вторым выходами,
19 - второй фазовращатель на 180°,
20 - третья антенна.
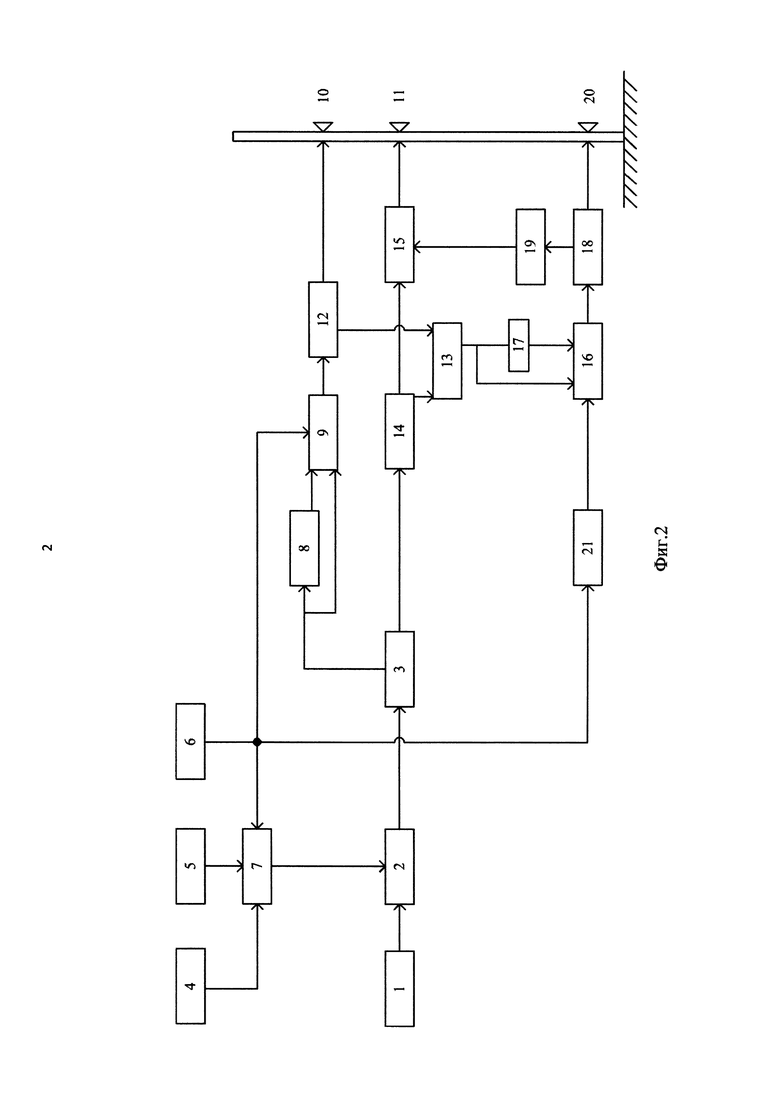
На фиг. 2 представлена структурная электрическая схема второго варианта глиссадного радиомаяка для обеспечения инструментального захода самолетов на посадку по крутой траектории в соответствии с настоящим изобретением. На фиг. 2 введены следующие обозначения дополнительных устройств:
12 - второй делитель с первым и вторым выходами,
13 - первый сумматор,
14 - третий делитель с первым и вторым выходами,
15 - второй сумматор с первым и вторым входами,
16 - третий переключатель,
17 - второй фазовращатель на 180°,
18 - третий делитель с первым и вторым выходами,
19 - третий фазовращатель на 180°,
20 - третья антенна,
21 - линия задержки.
На фиг. 3 представлена зависимость информационного параметра (КРС) от угла места для ГРМ-прототипа в пределах до верхней границы стандартной зоны действия ГРМ.
На фиг. 4 представлена зависимость нормированного отклонения стрелки на пилотажно-навигационном приборе от угла места для ГРМ-прототипа в пределах границ стандартной зоны действия ГРМ.
На фиг. 5 представлена зависимость информационного параметра глиссады (КРС) от угла места для ГРМ-прототипа в расширенной зоне ГРМ.
На фиг. 6 представлена зависимость нормированного отклонения стрелки на пилотажно-навигационном приборе от угла места для ГРМ-прототипа в расширенной зоне ГРМ.
На фиг. 7 представлена зависимость информационного параметра (КРС) от угла места для ГРМ по настоящему изобретению в пределах границ стандартной зоны действия ГРМ.
На фиг. 8 представлена зависимость нормированного отклонения стрелки на пилотажно-навигационном приборе от угла места для ГРМ по настоящему изобретению в пределах границ стандартной зоны действия ГРМ.
На фиг. 9 представлена зависимость информационного параметра (КРС) от угла места для ГРМ по настоящему изобретению в расширенной зоне ГРМ.
На фиг. 10 представлена зависимость нормированного отклонения стрелки на пилотажно-навигационном приборе от угла места для ГРМ по настоящему изобретению в расширенной зоне ГРМ.
Осуществление изобретения
Обратимся к фиг. 1, на которой представлена структурная электрическая схема первого варианта глиссадного радиомаяка для обеспечения инструментального захода самолетов на посадку по крутой траектории (далее ГРМ) по настоящему изобретению. ГРМ содержит последовательно соединенные генератор высокочастотных колебаний 1, первый ключ 2 и первый делитель 3 с первым и вторым выходами, первый 4, второй 5 и третий 6 генераторы прямоугольных колебаний, первый переключатель 7 с первым и вторым сигнальным входом, управляющим входом и выходом, первый фазовращатель 8 на 180°, второй переключатель 9 с первым и вторым сигнальными входами, управляющим входом и выходом, первую антенну 10, вторую антенну 11, дополнительно содержит второй делитель 12 с первым и вторым выходами, сумматор 13 с первым и вторым входами, второй генератор 14 высокочастотных колебаний, второй ключ 15, третий переключатель 16 с сигнальным входом, управляющим входом и первым и вторым выходами, аттенюатор 17, третий делитель 18, второй фазовращатель 19 на 180° и третью антенну 20. Выходы первого 4 и второго 5 генераторов прямоугольных колебаний соединены с первым и вторым сигнальными входами первого переключателя 7. Выход третьего генератора 6 прямоугольных колебаний соединен с управляющим входом первого переключателя 7 и управляющим входом второго 9 переключателя. Выход первого переключателя 7 соединен с входом второго делителя 12, первый выход которого соединен с управляющим входом первого ключа 2. Первый выход первого делителя мощности 3 соединен с первым входом второго переключателя 9 и с первым фазовращателем 8 на 180°, выход которого соединен со вторым входом второго переключателя 9. Выход переключателя 9 соединен с первой антенной 10. Второй выход первого делителя 3 соединен с первым входом сумматора 13, выход которого соединен со второй антенной 11. Второй генератор высокочастотных колебаний 14 соединен со вторым 15 ключом, выход которого соединен с сигнальным входом третьего переключателя 16. Управляющий вход второго ключа соединен со вторым выходом второго делителя 12. Управляющий вход третьего переключателя 16 соединен с третьим 6 генератором прямоугольных колебаний. Первый выход третьего переключателя 16 соединен с входом третьего делителя 18, второй выход третьего переключателя соединен с аттенюатором 17, выход которого соединен с входом третьего делителя 18. Первый выход третьего делителя 18 соединен последовательно со вторым фазовращателем 19 на 180° и со вторым входом сумматора 13, а второй выход третьего делителя 18 соединен с третьей антенной 20. Высоты подвеса относительно поверхности Земли h1 и h2 первой 10 и второй 11 антенн равны  и
и  , где λ - длина волны, θгл - угол глиссады. Высота подвеса h3 третьей 20 антенны меньше высоты подвеса второй 11 антенны.
, где λ - длина волны, θгл - угол глиссады. Высота подвеса h3 третьей 20 антенны меньше высоты подвеса второй 11 антенны.
Все упомянутые выше устройства могут быть выполнены аналогично устройствам, реализованным в серийном ГРМ изделия ПРМГ-76УМ, выпускаемым Челябинским радиозаводом "Полет" и эксплуатируемым на аэродромах государственной авиации РФ.
ГРМ работает следующим образом. Высокочастотные гармонические колебания с частотой ω1 от первого генератора 1 поступают на сигнальный вход первого ключа 2, на управляющий вход которого через второй делитель 12 поступают две чередующиеся последовательности прямоугольных колебаний: с частотой 2100 Гц с выхода первого генератора 4 прямоугольных колебаний и с частотой 1300 Гц с выхода второго генератора 5 прямоугольных колебаний. Смена прохождения колебаний с частотами 2100 Гц и 1300 Гц осуществляется под управлением третьего генератора 6 с частотой 12,5 Гц. В течение одного полупериода коммутации (в течение 0,04 сек.) через переключатель 7 и второй делитель 12 следует периодический сигнал прямоугольной формы, длительность импульса и длительность паузы которого в периоде равны ("меандр") с частотой 2100 Гц, а в течение второго полупериода коммутации (в течение последующих 0,04 сек.) следует "меандр" с частотой 1300 Гц. Высокочастотный сигнал, модулированный сигналами в форме "меандр " с частотами 2100 Гц и 1300 Гц, с выхода первого ключа 2 поступает на вход первого делителя 3, с первого выхода которого поступает на первый вход второго переключателя 9 и через первый фазовращатель 8 на 180° поступают на второй вход второго переключателя 9. С выхода переключателя 9 сигнал поступает на вход первой антенны 10. Со второго выхода третьего 3 делителя сигнал через сумматор 13 поступает на вход второй 11 антенны.
С выхода генератора 6 управляющие сигналы поступают на управляющий вход переключателя 9. При этом высокочастотные колебания с частотой ω1, модулированные "меандром" с частотой 2100 Гц, с первого выхода делителя 3 поступают непосредственно на первый вход переключателя 9, а модулированные "меандром" с частотой 1300 Гц, проходят через первый фазовращатель 8 на 180° и далее поступают на второй вход переключателя 9. Прохождение сигналов с частотой "меандра" 2100 Гц выполняется в течение одного полупериода колебания генератора 6, а с частотой "меандра" 1300 Гц - в течение другого полупериода колебания с частотой 12,5 Гц. В каждый из полупериодов колебания с частотой 12,5 Гц высокочастотные колебания излучаются первой 12 и второй 13 антеннами. В первый полупериод излучаются высокочастотные сигналы первого генератора 1 с несущей частотой ω1, модулированные "меандром" с частотой 2100 Гц, с диаграммой направленности F2100(θ), во второй полупериод излучаются сигналы первого генератора 1 с несущей частотой ω1, модулированные "меандром" с частотой 2100 Гц, с диаграммой направленности F1300(θ). Точка пересечения диаграмм направленности F2100(θ) и F1300(θ) определяет положение угла глиссады θгл.
Высокочастотные гармонические колебания с частотой ω2 от второго 14 генератора высокочастотных колебаний поступают на сигнальный вход второго ключа 15. На управляющий вход второго ключа 15 со второго выхода второго делителя 12 поступают две чередующиеся последовательности прямоугольных колебаний типа "меандр": с частотой 2100 Гц с и с частотой 1300 Гц. Смена прохождения высокочастотных колебаний, модулированных "меандром" с частотами 2100 Гц и 1300 Гц, как упомянуто выше, осуществляется под управлением третьего генератора 6 с частотой 12,5 Гц. В течение одного полупериода коммутации (в течение 0,04 сек.) через первый переключатель 7 и второй делитель 12 следует "меандр" с частотой 2100 Гц, а в течение второго полупериода следует "меандр" с частотой 1300 Гц. При этом переключатель 16, управляемый от генератора прямоугольных колебаний 6 с частотой 12,5 Гц, пропускает сигналы, модулированные "меандром" с частотой 2100 Гц, через второй выход, которые далее через аттенюатор 17 поступают на вход третьего 18 делителя, а сигналы, модулированные "меандром" с частотой с частотой 1300 Гц, без ослабления проходят непосредственно на вход третьего делителя 18. Часть мощности сигналов, поступившей в третий делитель, поступает далее на вход третьей антенны 20, а другая часть - через второй фазовращатель 19 на 180° поступает на второй вход сумматора 13, с выхода которого поступает на вход второй антенны 11. На пути через второй фазовращатель 19 на 180° сигналы получают дополнительный сдвиг по фазе на 180° относительно сигналов, прошедших в третью 20 антенну. Противофазность сигналов с несущей частотой ω2, излучаемых второй антенной, с сигналами, излучаемыми третьей антенной, обеспечивает «вырезку» (то есть малый уровень напряженности поля) в окрестности зоны действия «основной» глиссады, формируемой в результате излучения сигналов первого генератора высокочастотных колебаний с несущей частотой ω1 первой и второй антеннами. Из-за ослабления части сигналов второго генератора высокочастотных колебаний, прошедших через аттенюатор 17 (сигналы с частотой меандра 2100 Гц), сигналы, излучаемые второй и третьей антенной, будут иметь заданное значение информационного параметра системы посадки (коэффициента разнослышимости) - КРС, показывающее пилоту, что глиссада находится ниже самолета. Этот сигнал будет преобладать в верхней части расширенной зоны действия маяка. Значение КРС будет уменьшаться по мере приближения самолета сверху к линии глиссады, а на глиссаде КРС будет равен нулю. Вблизи глиссады будут преобладать сигналы первого генератора высокочастотных колебаний, а характеристики глиссады будут соответствовать классическим требованиям.
Обратимся к фиг. 2, на которой представлена структурная электрическая схема второго варианта глиссадного радиомаяка для обеспечения инструментального захода самолетов на посадку на аэродромы по крутой траектории (далее ГРМ). ГРМ содержит последовательно соединенные генератор высокочастотных колебаний 1, первый ключ 2 и первый делитель 3 с первым и вторым выходами, первый 4, второй 5 и третий 6 генераторы прямоугольных колебаний, первый переключатель 7 с первым и вторым сигнальными входами, управляющим входом и выходом, первый фазовращатель 8 на 180°, второй переключатель 9 с первым и вторым входами, управляющим входом и выходом, первую антенну 10, вторую антенну 11, причем высоты подвеса относительно поверхности Земли первой h1 и второй h2 антенн равны  и
и  , где λ - длина волны, θгл - угол глиссады, дополнительно содержит второй делитель 12 с первым и вторым выходами, первый сумматор 13 с первыми вторым входами и выходом, третий делитель 14 с первым и вторым выходами, второй сумматор 15 с первым и вторым входами и выходом, третий переключатель 16 с первым и вторым сигнальными входами, управляющим входом и выходом, второй 17 фазовращатель на 180°, третий делитель 18 с входом и первым и вторым выходами, третий фазовращатель 19 на 180°, третью антенну 20, линию задержки 21, причем выходы первого 4 и второго 5 генераторов прямоугольных колебаний соединены с первым и вторым сигнальными входами первого 7 переключателя, соответственно, выход третьего генератора прямоугольных колебаний соединен с управляющим входом первого переключателя, с управляющим входом второго, первый выход делителя 3 соединен с первым входом второго 9 переключателя и с первым фазовращателем 8 на 180°, выход которого соединен со вторым входом второго переключателя 9, выход второго 9 переключателя соединен с входом второго 12 делителя, первый выход которого соединен с входом первой 10 антенны, а второй соединен с первым входом первого 13 сумматора, второй выход первого делителя 3 соединен с входом третьего 14 делителя, первый выход которого соединен с первым 151 входом второго 15 сумматора, а второй выход соединен со вторым входом первого 13 сумматора, выход второго сумматора 15 соединен с входом второй антенны 11, выход первого сумматора 13 соединен с первым сигнальным входом третьего 16 переключателя и вторым фазовращателем 17, выход которого соединен со вторым сигнальным входом третьего 16 переключателя, выход третьего 16 переключателя соединен с входом четвертого 18 делителя, первый выход которого последовательно соединен с третьим 19 фазовращателем на 180° и вторым входом второго сумматора, а второй выход соединен с третьей антенной 20, управляющий вход третьего 16 переключателя последовательно соединен с линией задержки 21 и третьим 6 генератором прямоугольных колебаний, при этом высота подвеса третьей антенны ниже высоты подвеса второй антенны.
, где λ - длина волны, θгл - угол глиссады, дополнительно содержит второй делитель 12 с первым и вторым выходами, первый сумматор 13 с первыми вторым входами и выходом, третий делитель 14 с первым и вторым выходами, второй сумматор 15 с первым и вторым входами и выходом, третий переключатель 16 с первым и вторым сигнальными входами, управляющим входом и выходом, второй 17 фазовращатель на 180°, третий делитель 18 с входом и первым и вторым выходами, третий фазовращатель 19 на 180°, третью антенну 20, линию задержки 21, причем выходы первого 4 и второго 5 генераторов прямоугольных колебаний соединены с первым и вторым сигнальными входами первого 7 переключателя, соответственно, выход третьего генератора прямоугольных колебаний соединен с управляющим входом первого переключателя, с управляющим входом второго, первый выход делителя 3 соединен с первым входом второго 9 переключателя и с первым фазовращателем 8 на 180°, выход которого соединен со вторым входом второго переключателя 9, выход второго 9 переключателя соединен с входом второго 12 делителя, первый выход которого соединен с входом первой 10 антенны, а второй соединен с первым входом первого 13 сумматора, второй выход первого делителя 3 соединен с входом третьего 14 делителя, первый выход которого соединен с первым 151 входом второго 15 сумматора, а второй выход соединен со вторым входом первого 13 сумматора, выход второго сумматора 15 соединен с входом второй антенны 11, выход первого сумматора 13 соединен с первым сигнальным входом третьего 16 переключателя и вторым фазовращателем 17, выход которого соединен со вторым сигнальным входом третьего 16 переключателя, выход третьего 16 переключателя соединен с входом четвертого 18 делителя, первый выход которого последовательно соединен с третьим 19 фазовращателем на 180° и вторым входом второго сумматора, а второй выход соединен с третьей антенной 20, управляющий вход третьего 16 переключателя последовательно соединен с линией задержки 21 и третьим 6 генератором прямоугольных колебаний, при этом высота подвеса третьей антенны ниже высоты подвеса второй антенны.
Все упомянутые устройства могут быть выполнены аналогично устройствам, реализованным в серийном ГРМ изделия ПРМГ-76УМ, выпускаемым Челябинским радиозаводом "Полет" и эксплуатируемым на аэродромах государственной авиации РФ.
ГРМ работает следующим образом. Высокочастотные гармонические колебания первого генератора 1 с частотой ω1, поступают на сигнальный вход первого ключа 2, на управляющий вход 22 которого с выхода первого переключателя 7 поступают две чередующиеся последовательности прямоугольных колебаний: с частотой 2100 Гц с выхода первого генератора 4 прямоугольных колебаний и с частотой 1300 Гц с выхода второго генератора 5 прямоугольных колебаний. Смена прохождения колебаний с частотами 2100 Гц и 1300 Гц (формирование пачек импульсов с частотой 2100 Гц и пачек импульсов с частотой 1300 Гц) осуществляется под управлением третьего генератора 6 с частотой 12,5 Гц. В течение одного полупериода коммутации (в течение 0,04 с. ) через переключатель 7 следует периодический сигнал прямоугольной формы, длительность импульса и длительность паузы которого в периоде равны, ("меандр") с частотой 2100 Гц, а в течение второго полупериода следует "меандр" с частотой 1300 Гц. Модулированный "меандрами" с частотами 2100 Гц и 1300 Гц высокочастотный сигнал с выхода первого ключа 2 поступает на вход делителя 3, с первого выхода которого поступает на первый вход второго переключателя 9 и через первый фазовращатель 8 на 180° поступает на второй вход второго переключателя 9. С выхода переключателя 9 сигнал поступает на второй делитель 12, с первого выхода которого поступает на первую антенну 10, а со второго выхода - на первый вход первого 13 сумматора. Со второго выхода третьего 3 делителя сигнал поступает на вход третьего 14 делителя, с первого выхода которого через второй сумматор 15 поступает на вторую антенну 11. С выхода третьего генератора прямоугольных колебаний 6 управляющие сигналы поступают на управляющий вход переключателя 9. При этом под управлением генератора 6 высокочастотные колебания с частотой ω1, модулированные "меандром" с частотой 2100 Гц, с первого выхода делителя 3 поступают непосредственно на первый вход переключателя 9, а модулированные "меандром" с частотой 1300 Гц, проходят через первый фазовращатель 8 на 180° и далее поступают на второй вход переключателя 9. Прохождение сигналов с частотой "меандра" 2100 Гц выполняется в течение одного полупериода колебания генератора 6, а с частотой "меандра" 1300 Гц - в течение другого полупериода колебания с частотой 12,5 Гц. В каждый из полупериодов колебания с частотой 12,5 Гц высокочастотные колебания (модулированные либо меандром с частотой 2100 Гц, либо с частотой 1300 Гц) излучаются первой 10 и второй 11 антеннами. В первый полупериод излучаются высокочастотные сигналы первого генератора 1, модулированные "меандром" с частотой 2100 Гц, с диаграммой направленности F2100(θ), во второй полупериод излучаются сигналы первого генератора 1, модулированные "меандром" с частотой 1300 Гц, с диаграммой направленности F1300(θ). Точка пересечения диаграмм направленности F2100(θ) и F1300(θ) определяет положение угла глиссады θгл.
Высокочастотный сигнал, модулированный сигналом в форме "меандр" с частотой 2100 Гц в течение одного полупериода колебаний с частотой 12,5 Гц и противофазный с ним сигнал, модулированный "меандром " с частотой 1300 Гц в течение другого полупериода колебаний с частотой 12,5 Гц, со второго выхода второго делителя 12 поступает на первый вход сумматора 13. Высокочастотный сигнал, модулированный сигналом в форме "меандр" с частотой 2100 Гц в течение одного полупериода колебаний с частотой 12,5 Гц, и синфазный с ним высокочастотный сигнал, модулированный "меандром" с частотой 1300 Гц в течение другого полупериода колебаний с частотой 12,5 Гц, со второго выхода третьего делителя 14 поступает на второй вход первого сумматора 13. В результате на выходе первого сумматора 13 формируется сигнал с заданным значением КРС, определяемым соотношением амплитуд и фаз напряжений сигналов на первом и втором входах сумматора 13. В данном случае амплитуда сигнала, модулированного "меандром" с частотой 1300 Гц, должна быть больше амплитуды сигнала, модулированного "меандром" с частотой 2100 Гц (что соответствует нахождению глиссады ниже точки наблюдения). Этот сигнал используется далее для формирования верхней части расширенной зоны действия маяка. Для исключения нежелательной интерференции в пространстве этого сигнала с сигналами, формирующими, как указано выше, классическую глиссаду с помощью излучения сигналов первой и второй антеннами, должна быть обеспечена некогерентность упомянутых сигналов. В первом варианте ГРМ (по пункту 1 формулы настоящего изобретения) требуемая некогерентность сигналов обеспечивается за счет разноса по частоте высокочастотных колебаний первого 1 и второго 14 генераторов. Во втором варианте ГРМ (п. 2 формулы настоящего изобретения) некогерентность сигналов обеспечивается путем их фазовой манипуляции с применением третьего переключателя 16 и второго фазовращателя 17 на 180°. Высокочастотный сигнал, модулированный "меандрами" с частотой 2100 Гц в течение одного полупериода колебания с частотой 12,5 Гц и частотой 1300 Гц в течение второго полупериода поступает с выхода сумматора 13 на первый и второй входы третьего 16 переключателя. Переключатель 16 управляется третьим генератором прямоугольных колебаний 6, который осуществляет коммутацию упомянутых сигналов с частотой 12,5 Гц. Линия задержки 25 со временем задержки, равным четверть периода управляющих сигналов с частотой 12,5 Гц, обеспечивает смещение (задержку) управляющего сигнала на управляющем входе третьего 16 переключателя относительно сигналов на управляющих входах первого 2 и второго 9 переключателей. При этом, высокочастотные сигналы, модулированные "меандрами" с частотами 1300 и 2100 Гц, в течение четверти периода колебания с частотой 12,5 Гц будут иметь на выходе третьего переключателя нулевую добавку фазы (сигнал проходит через первый вход переключателя 16), а во второй четверти периода упомянутые сигналы будут иметь дополнительный фазовый сдвиг на 180° поскольку проходят на второй вход третьего переключателя через второй фазовращатель 17 на 180°. Далее этот фазоманипулированный сигнал с заданным значением КРС поступает на вход третьей антенны и через третий 19 фазовращатель 180° на вход второй антенны. Запитка этим сигналом второй и третьей антенн в противофазе формирует в пространстве зону излучения в верхней части зоны действия радиомаяка и «вырезку» в окрестности угла глиссады. Некогерентность сигналов, формирующих основную глиссаду, с сигналами, формирущими ее верхнюю расширенную зону действия, позволяет рассматривать их как независимые сигналы. Взаимодействие некогерентных сигналов рассмотрено в работе авторов [Войтович Н.И., Жданов Б.В., Зотов А.В. Моделирование работы двухчастотной инструментальной системы посадки самолетов. // Вестник ЮУрГУ Серия "Компьютерные технологии, управление, радиоэлектроника". 2013, том 13, №4]. Все ранее представленные рисунки, поясняющие формирование ДН и зоны действия маяка по первому варианту (по п. 1 настоящего изобретения), справедливы для описания работы второго варианта ГРМ (по п. 2 формулы изобретения).
Пример реализации
В системах посадки самолетов и метрового и дециметрового диапазонов длин волн принято использовать электромагнитные волны с горизонтальной поляризацией; при этом на глиссаде вектор напряженности электрического поля  параллелен горизонтальной плоскости, а вектор
параллелен горизонтальной плоскости, а вектор  лежит в вертикальной плоскости.
лежит в вертикальной плоскости.
Для простоты предположим, что первая 10, вторая 11 и третья 20 антенны в плоскости вектора  в свободном пространстве являются ненаправленными. Учитывая то, что при горизонтальной поляризации коэффициент отражения электромагнитных волн от подстилающей поверхности близок по величине к минус единице, получим, что диаграммы направленности первой ƒ1(θ), второй ƒ2(θ) и третьей ƒ3(θ) антенн с учетом влияния отражений от подстилающей поверхности описываются интерференционными множителями Земли:
в свободном пространстве являются ненаправленными. Учитывая то, что при горизонтальной поляризации коэффициент отражения электромагнитных волн от подстилающей поверхности близок по величине к минус единице, получим, что диаграммы направленности первой ƒ1(θ), второй ƒ2(θ) и третьей ƒ3(θ) антенн с учетом влияния отражений от подстилающей поверхности описываются интерференционными множителями Земли:



где:


с - скорость света,
ƒ - частота.
Высота подвеса первой 10 антенны определяется по заданному углу глиссады θгл:

Высота подвеса второй 11 антенны в 2 раза ниже высоты подвеса первой антенны:

Высота подвеса третьей 20 антенны должна быть ниже высоты подвеса второй антенны. Для определенности, предположим, что высота подвеса третьей антенны равна одной длине волны:

Вычисление информационного параметра КРС∑ при работе ГРМ с двумя передатчиками на разнесенных частотах ω1 и ω2 вычислим по формуле, полученной в статье [Войтович Н.И., Жданов Б.В., Зотов А.В. Моделирование работы двухчастотной инструментальной системы посадки самолетов. // Вестник ЮУрГУ Серия "Компьютерные технологии, управление, радиоэлектроника". 2013, том 13, №4].

где:




Коэффициент а определяется по известным соотношениям, исходя из условия обеспечения заданной крутизны характеристики глиссады.
Коэффициент b определяется, исходя из условия обеспечения превышения сигнала широкого канала над сигналом узкого канала при углах места выше 2θгл. Специалисты в области радиомаячных систем посадки знают, как определить коэффициенты а и b.
Ниже приведены результаты расчетов зависимости КРС∑(θ) при а=0,5; b=2, θгл=3°, ƒ=960 МГц.
Проведем сравнение характеристики ГРМ по настоящему изобретению с характеристиками ГРМ прототипа.
При стандартном угле глиссады, равном 3°, верхняя граница зоны действия ГРМ составляет угол 5,25° (фиг. 3). Это означает, что в секторе углов места от 5,25° до 3° стрелка (глиссадный индекс) отклонения угла глиссады на пилотажно-навигационном приборе (ПНП) отклонена вниз, информируя пилота о необходимости снизить самолет (Статья: Д. Просько. "Заход на посадку по курсо-глиссадной системе, www.Avsim.su" (рис. 2). При нахождении на глиссаде стрелка ориентирована на ПНП строго горизонтально (фиг. 4). Выше угла, равного 5,25°, верная информация о месте нахождения глиссады не гарантируется.
Что на самом деле наблюдается выше верхней границы зоны действия ГРМ? На фиг. 5 представлена зависимость информационного параметра (коэффициента разнослышимости сигналов КРС с частотой модуляции 2100 Гц и 1300 Гц) от угла места θ:

где:
λ - длина волны на рабочей частоте,
h1 - высота подвеса верхней (первой 10) антенны ГРМ относительно поверхности Земли.
Как видно из рассмотрения графика на фиг. 5, зависимость КРС от угла места θ имеет осциллирующий характер. С ростом угла места θ от верхней границы зоны действия ГРМ до 50° информационный параметр шесть раз обращается в нуль, т.е. имеется шесть "ложных глиссад". При этом имеется три сектора углов места, в которых верна информация о том, что истинная глиссада находится ниже и четыре сектора углов места, в которых информация о местонахождении истинной глиссады является ложной. На фиг. 6 показано отклонение стрелки (глиссадного индекса) угла глиссады на ПНП от горизонтального положения, соответствующего положению самолета на глиссаде. В пределах зоны действия ГРМ отклонение стрелки линейным образом зависит от величины КРС. За пределами указанной зоны, когда абсолютная величина КРС больше 42%, стрелка "зашкаливает". В секторах с зашкаленной стрелкой ее положение на графиках на фиг. 6 представлено отрезками прямых линий, параллельных горизонтальной оси (оси 0θ). При снижении самолета с позиции под углом 50° до истинной глиссады стрелка перед глазами пилота шесть раз перейдет из крайнего нижнего положения в крайнее верхнее положение, вводя пилота в заблуждение.
Таким образом, пользоваться информацией ГРМ прототипа при снижении по крутой глиссаде нельзя.
В ГРМ по настоящему изобретению зона действия глиссады в вертикальной плоскости расширена, по крайней мере, до угла места, равного 40°. При этом зона глиссады с истинным углом глиссады (зависимость КРС от угла места) сохраняется неизменной (фиг. 7). Поведение стрелки отклонения угла глиссады на ПНП в пределах ранее заданной зоны действия сохраняется неизменным (фиг. 8). Однако, устранена осциллирующая зависимость информационного параметра от угла места (фиг. 9). На всех углах выше глиссады (вплоть до угла, равного 40°) на ПНП с помощью стрелки угла глиссады будет отображаться информация о том, что глиссада внизу (фиг. 10). Пилот при снижении самолета по крутой траектории вплоть до истинной глиссады будет непрерывно иметь информацию о том, что глиссада внизу.
При нахождении выше стандартной верхней границы зоны действия стрелка ПНП находится в крайнем нижнем положении, "в зашкале" (горизонтальный участок на графике). При дальнейшем снижении, ниже стандартной верхней границы зоны действия, стрелка будет плавно приближаться к горизонтальному положению, позволяя пилоту плавно вписаться в глиссаду и далее совершать полет, как обычно, по глиссаде.
| название | год | авторы | номер документа |
|---|---|---|---|
| Глиссадный радиомаяк | 2018 |
|
RU2693024C1 |
| Способ и радиомаяк системы инструментальной посадки с функцией проверки и калибровки бортовых приемников воздушных судов (варианты) | 2023 |
|
RU2816376C1 |
| СПОСОБ РЕГУЛИРОВКИ ИНФОРМАЦИОННОГО ПАРАМЕТРА КУРСО-ГЛИССАДНЫХ РАДИОМАЯКОВ И УСТРОЙСТВА ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2017 |
|
RU2695316C2 |
| ДВУХЧАСТОТНЫЙ ГЛИССАДНЫЙ РАДИОМАЯК | 2016 |
|
RU2624263C1 |
| Глиссадный радиомаяк | 2023 |
|
RU2818668C1 |
| ГЛИССАДНЫЙ РАДИОМАЯК (ВАРИАНТЫ) | 2009 |
|
RU2429499C2 |
| Способ и устройство контроля за положением глиссады и координатами самолёта в дальней зоне | 2018 |
|
RU2692079C1 |
| ДВУХЧАСТОТНЫЙ КУРСОВОЙ РАДИОМАЯК (ВАРИАНТЫ) | 2014 |
|
RU2575010C1 |
| ДВУХЧАСТОТНЫЙ КУРСОВОЙ РАДИОМАЯК (ВАРИАНТЫ) | 2013 |
|
RU2543083C1 |
| Способ и устройство контроля за отклонением снижающегося самолета от оси взлетно-посадочной полосы | 2019 |
|
RU2725891C1 |
Изобретение относится к радиотехнике и может использоваться в системах инструментального обеспечения захода самолетов на посадку. Техническим результатом изобретения является расширение зоны действия глиссадного радиомаяка (ГРМ) в вертикальной плоскости для обеспечения захода самолетов на посадку по крутой траектории. Технический результат достигается тем, что ГРМ "с опорным нулем", содержащий генератор, первую и вторую антенны с высотами подвеса  и
и  , где λ - длина волны, θгл - угол глиссады, дополнительно содержит третью антенну, расположенную ниже второй антенны, а также содержит устройства, которые совместно формируют широкую зону в вертикальной плоскости, причем сигналы в этой зоне некогерентны с сигналами известного ГРМ "нулевой зоны". В первом варианте ГРМ некогерентность сигналов достигается применением дополнительного генератора, отличающегося по частоте от частоты упомянутого генератора. Во втором варианте сигнал ГРМ делится на два канала. Сигналы первого канала формируют "традиционную" зону глиссады. Сигналы второго канала подвергаются фазовой манипуляции. Сигналы второго канала формируют широкую в вертикальной плоскости диаграмму направленности с минимумом при угле места, равном θгл. С учетом "эффекта захвата" в бортовом приемнике формируется характеристика глиссады, практически совпадающая с традиционной характеристикой прототипа и продолженная за счет излучения второй и третьей антеннами сигналов второго канала до больших углов места. 2 н.п. ф-лы, 10 ил.
, где λ - длина волны, θгл - угол глиссады, дополнительно содержит третью антенну, расположенную ниже второй антенны, а также содержит устройства, которые совместно формируют широкую зону в вертикальной плоскости, причем сигналы в этой зоне некогерентны с сигналами известного ГРМ "нулевой зоны". В первом варианте ГРМ некогерентность сигналов достигается применением дополнительного генератора, отличающегося по частоте от частоты упомянутого генератора. Во втором варианте сигнал ГРМ делится на два канала. Сигналы первого канала формируют "традиционную" зону глиссады. Сигналы второго канала подвергаются фазовой манипуляции. Сигналы второго канала формируют широкую в вертикальной плоскости диаграмму направленности с минимумом при угле места, равном θгл. С учетом "эффекта захвата" в бортовом приемнике формируется характеристика глиссады, практически совпадающая с традиционной характеристикой прототипа и продолженная за счет излучения второй и третьей антеннами сигналов второго канала до больших углов места. 2 н.п. ф-лы, 10 ил.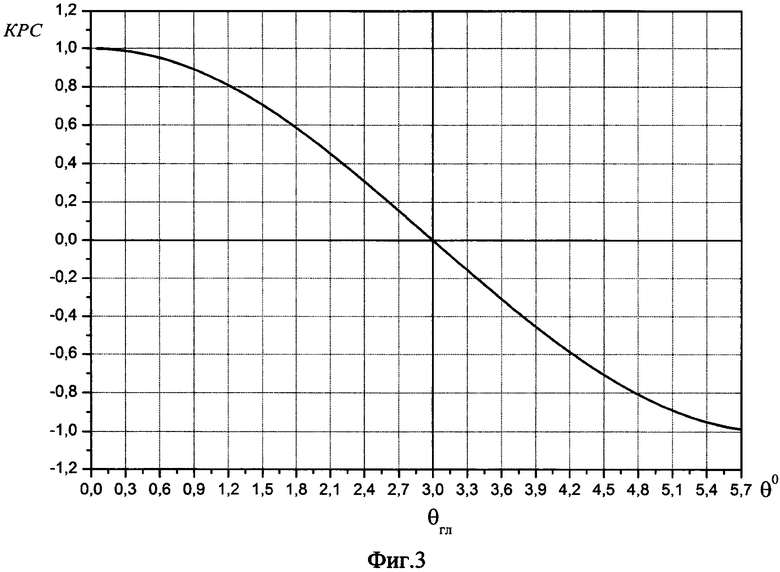
1. Глиссадный радиомаяк для обеспечения инструментального захода самолетов на посадку по крутой траектории, содержащий последовательно соединенные первый генератор высокочастотных колебаний, первый ключ и первый делитель, первый, второй и третий генераторы прямоугольных колебаний, первый переключатель с первым и вторым сигнальными входами, управляющим входом и выходом, первый фазовращатель на 180°, второй переключатель с первым и вторым сигнальными входами, управляющим входом и выходом, первую антенну, вторую антенну, причем выходы первого и второго генераторов прямоугольных колебаний соединены с сигнальными входами первого переключателя, выход третьего генератора прямоугольных колебаний соединен с управляющим входом первого переключателя и с управляющим входом второго переключателя, первый выход первого делителя соединен с первым входом второго переключателя и с первым фазовращателем на 180°, выход которого соединен со вторым входом второго переключателя, выход второго переключателя соединен с входом первой антенны; высоты подвеса относительно поверхности Земли h1 и h2 первой и второй антенн равны
 и
и  ,
,
где λ - длина волны, θгл - угол глиссады, отличающийся тем, что дополнительно содержит второй делитель с первым и вторым выходами, сумматор с первым и вторым входами, второй генератор высокочастотных колебаний, второй ключ, третий переключатель с сигнальным входом, управляющим входом, с первым и вторым выходами, аттенюатор, третий делитель с первым и вторым выходами, второй фазовращатель на 180° и третью антенну, причем выход первого переключателя соединен с входом второго делителя, первый выход которого соединен с управляющим входом первого ключа; второй выход первого делителя соединен с первым входом сумматора, выход которого соединен с входом второй антенны; второй генератор высокочастотных колебаний соединен с сигнальным входом второго ключа, выход которого соединен с сигнальным входом третьего переключателя, управляющий вход второго ключа соединен со вторым выходом второго делителя, управляющий вход третьего переключателя соединен с третьим генератором прямоугольных колебаний, первый выход третьего переключателя соединен с входом третьего делителя, второй выход третьего переключателя соединен с аттенюатором, выход которого соединен с входом третьего делителя, первый выход третьего делителя соединен последовательно со вторым фазовращателем на 180° и вторым входом сумматора, а второй выход третьего делителя соединен с третьей антенной, при этом высота подвеса третьей антенны меньше высоты подвеса второй антенны.
2. Глиссадный радиомаяк для обеспечения инструментального захода самолетов на посадку по крутой траектории, содержащий последовательно соединенные генератор высокочастотных колебаний, первый ключ и первый делитель с первым и вторым выходами, первый, второй и третий генераторы прямоугольных колебаний, первый переключатель с первым и вторым сигнальными входами, управляющим входом и выходом, первый фазовращатель на 180°, второй переключатель с первым и вторым входами, управляющим входом и выходом, первую антенну, вторую антенну, причем выходы первого и второго генераторов прямоугольных колебаний соединены с сигнальными входами первого переключателя, выход третьего генератора прямоугольных колебаний соединен с управляющим входом первого переключателя и с управляющим входом второго переключателя, первый выход первого делителя соединен с первым входом второго переключателя и с первым фазовращателем на 180°, выход которого соединен со вторым входом второго переключателя, высоты подвеса относительно поверхности Земли h1 и h2 первой и второй антенн равны
 и
и  ,
,
где λ - длина волны, θгл - угол глиссады, отличающийся тем, что дополнительно содержит второй делитель с первым и вторым выходами, первый сумматор с первым и вторым входами и выходом, третий делитель с первым и вторым выходами, второй сумматор с первым и вторым входами и выходом, третий переключатель с первым и вторым сигнальными входами, управляющим входом и выходом, второй фазовращатель на 180°, третий делитель с входом и первым и вторым выходами, третий фазовращатель на 180°, третью антенну, линию задержки, причем выход второго переключателя соединен с входом второго делителя, первый выход которого соединен с входом первой антенны, а второй - соединен с первым входом первого сумматора, второй выход первого делителя соединен с входом третьего делителя, первый выход которого соединен с первым входом второго сумматора, а второй выход соединен со вторым входом первого сумматора, выход второго сумматора соединен с входом второй антенны, выход первого сумматора соединен с первым сигнальным входом третьего переключателя и вторым фазовращателем, выход которого соединен со вторым сигнальным входом третьего переключателя, выход третьего переключателя соединен с входом третьего делителя, первый выход которого последовательно соединен с третьим фазовращателем на 180° и вторым входом второго сумматора, а второй выход соединен с третьей антенной, управляющий вход третьего переключателя последовательно соединен с линией задержки и третьим генератором прямоугольных колебаний, при этом высота подвеса третьей антенны ниже высоты подвеса второй антенны.
| ГЛИССАДНЫЙ РАДИОМАЯК (ВАРИАНТЫ) | 2009 |
|
RU2429499C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2537201C2 |
| СПОСОБ ТОЧНОЙ ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 1993 |
|
RU2095293C1 |
| US 5250955 A, 05.10.1993 | |||
| JP 9197033 A, 31.07.1997 | |||
| US 5689273 A, 18.11.1997 | |||
| FR 2917823 A1, 26.12.2008. | |||

