Область техники, к которой относится изобретение
Изобретение относится к радиомаячным системам посадки самолетов метрового диапазона длин волн формата ILS и дециметрового диапазона длин волн формата ПРМГ, в частности, к курсовым радиомаякам.
Уровень техники
Курсовые радиомаяки (КРМ) системы посадки самолетов формируют в пространстве вертикальную плоскость, проходящую через ось взлетно-посадочной полосы (ВПП). Бортовой приемник системы посадки измеряет параметры принимаемых сигналов КРМ и определяет по ним величину отклонения самолета от этой плоскости. В КРМ имеется развитая система встроенного и вынесенного контроля за положением формируемой плоскости курса в ближней зоне и зоне Френеля антенны КРМ и, кроме того, имеется дополнительная система контроля в дальнем поле антенны КРМ. Система контроля в дальнем поле антенны КРМ устанавливается за противоположным по отношению к позиции КРМ торцом ВПП.
Известно устройство контроля дальнего поля курсового радиомаяка системы посадки самолетов метрового диапазона формата ILS, включающее в себя прибор FFM 734 производства ООО Научно производственное объединение "Радиотехнические системы", г Челябинск (http://nports.ru, Продукция, Комплекс 734, каталог 2017, стр. 15, дата обращения 23.03.2019 г), предназначенный для контроля положения средней линии курса КРМ и выходных характеристик КРМ в дальней зоне. Известен способ контроля дальнего поля с применением прибора FFM734. С помощью указанного прибора определяют, во-первых, положение плоскости курса по величине информационного параметра-разности глубин модуляции высокочастотного сигнала (РГМ) на оси ВПП и, во-вторых, «чувствительность к смещению», то есть крутизну зависимости РГМ от смещения точки наблюдения относительно оси ВПП. При измерениях используют две антенны. Первую антенну устанавливают на продолжении оси ВПП на стороне захода самолета на посадку. С помощью первой антенны определяют положение плоскости курса. Вторую антенну устанавливают сбоку от оси ВПП; с ее помощью измеряют чувствительность к смещению.
Применение системы контроля в дальнем поле КРМ предписано в нормативных документах, в том числе в Приложении 10 к Конвенции о международной гражданской авиации. Авиационная электросвязь. Том 1. Радионавигационные средства. ИКАО, Монреаль (Канада), 2006. - 616 с. (далее, [1]).
Рекомендации ИКАО относятся к системам посадки формата ILS, однако они могут быть распространены и на КРМ формата ПРМГ.
Недостатком известного слособа является то, что он не позволяет определить положение самолета, заходящего на посадку, относительно вертикальной плоскости, проходящей через ось ВПП.
Недостатком известного устройства контроля поля в дальней зоне, является то, что он не позволяет выполнить измерения в объеме, достаточном для определения положения самолета, заходящего на посадку, относительно вертикальной плоскости, проходящей через ось ВПП.
Управление заходом самолета на посадку выполняется диспетчером посадки на командно-диспетчерском пункте (КДП) аэродрома. Однако, диспетчер посадки не имеет возможности инструментально контролировать положение самолета относительно оси ВПП и, соответственно, в сложных погодных условиях не может оценить «правильность» выполнения захода на посадку. Решение разрешить или запретить выполнение посадки диспетчер принимает без учета этой важной информации. Очевидно, что наличие обратной связи, то есть информирование диспетчера о координатах снижающегося самолета, даже если оно выполняется в некоторой одной точке на траектории снижения самолета, повысило бы безопасность этой сложной и ответственной части полета.
В настоящем изобретении предлагаются способ и устройство формирования информации об отклонении самолета от плоскости курса и от оси ВПП в горизонтальной плоскости и передачи ее диспетчеру посадки, не имеющие аналогов.
Раскрытие изобретения
Технический результат изобретения направлен на повышение безопасности полетов самолетов гражданской и государственной авиации. Технический результат достигается тем, что согласно способу выполняется дальний контроль за положением линии курса относительно оси ВПП и за величиной отклонения снижающего самолета от оси ВПП в горизонтальной плоскости (далее, дальний контроль). Дальний контроль заключается в том, что в точке контроля дальнего поля выполняется следующее. Первой антенной, установленной на продолжении оси ВПП, и второй антенной, установленной сбоку от оси ВПП, и ориентированными в направлении на курсовой радиомаяк, принимают сигналы курсового радиомаяка, измеряют параметры сигнала посадки, дополнительно принимают с помощью третьей антенны, ориентированной максимумом диаграммы направленности в вертикальном направлении, сигналы курсового радиомаяка, отраженные от заходящего на посадку самолета, измеряют информационный параметр в отраженных сигналах, вычисляют величину отклонения самолета от формируемой плоскости курса и от оси взлетно-посадочной полосы, передают на командно-диспетчерский пункт информацию о величине отклонения самолета и плоскости курса от оси взлетно-посадочной полосы в горизонтальной плоскости и о чувствительности к смещению.
Для достижения технического результата используют устройство, содержащее первую и вторую антенны, первый измеритель сигналов посадки с первым и вторым входами и выходом, линию связи и информационный прибор, при этом первая антенна соединена с первым входом первого измерителя сигналов посадки, вторая антенна соединена со вторым входом первого измерителя сигналов посадки, первая и вторая антенны установлены в зоне контроля дальнего поля курсового радиомаяка, первая антенна установлена на продолжении оси взлетно-посадочной полосы, вторая антенна установлена сбоку от взлетно-посадочной полосы, первая и вторая антенны ориентированы в направлении на антенну курсового радиомаяка, информационный прибор размещен на командно-диспетчерском пункте, отличающийся тем, что дополнительно содержит третью антенну, второй измеритель сигналов посадки с входом и выходом, вычислитель с первым и вторым входами и выходом, при этом третья антенна ориентирована максимумом диаграммы направленности вверх и соединена с входом второго измерителя сигналов посадки, выход первого измерителя сигналов системы посадки соединен с первым входом вычислителя, выход второго измерителя сигналов посадки соединен со вторым входом вычислителя, выход которого через линию связи соединен с информационным прибором.
Прием дополнительно с помощью третьей антенны, ориентированной максимумом диаграммы направленности в вертикальном направлении, сигналов курсового радиомаяка, отраженных от заходящего на посадку самолета, последующие измерения параметров сигналов и соответствующие вычисления позволяют определить величину отклонения самолета от оси взлетно-посадочной полосы, передать на командно-диспетчерский пункт информацию о величине отклонения самолета и плоскости курса от оси взлетно-посадочной полосы и о чувствительности к смещению. Диспетчер, получив эту информацию, может разрешить или запретить выполнение посадки пилоту этого самолета.
Данный способ предполагает получение информации о заходящем на посадку самолете в некоторой точке, например, в районе дальнего приводного маяка (ДПРМ), находящейся от торца ВПП примерно на удалении 4 км. При этом, у пилота будет достаточно времени, чтобы выполнить указание диспетчера, сформированные с учетом предоставленной информации о положении самолета. Предлагаемый способ и устройство обеспечивают повышение безопасности выполнения посадки самолетов. Кроме того, на КДП получают информацию о выходных характеристиках курсового радиомаяка: о положении линии курса и чувствительности к смещению в дальней зоне радиомаяка, что важно для контроля за работой курсового радиомаяка.
Краткое описание чертежей
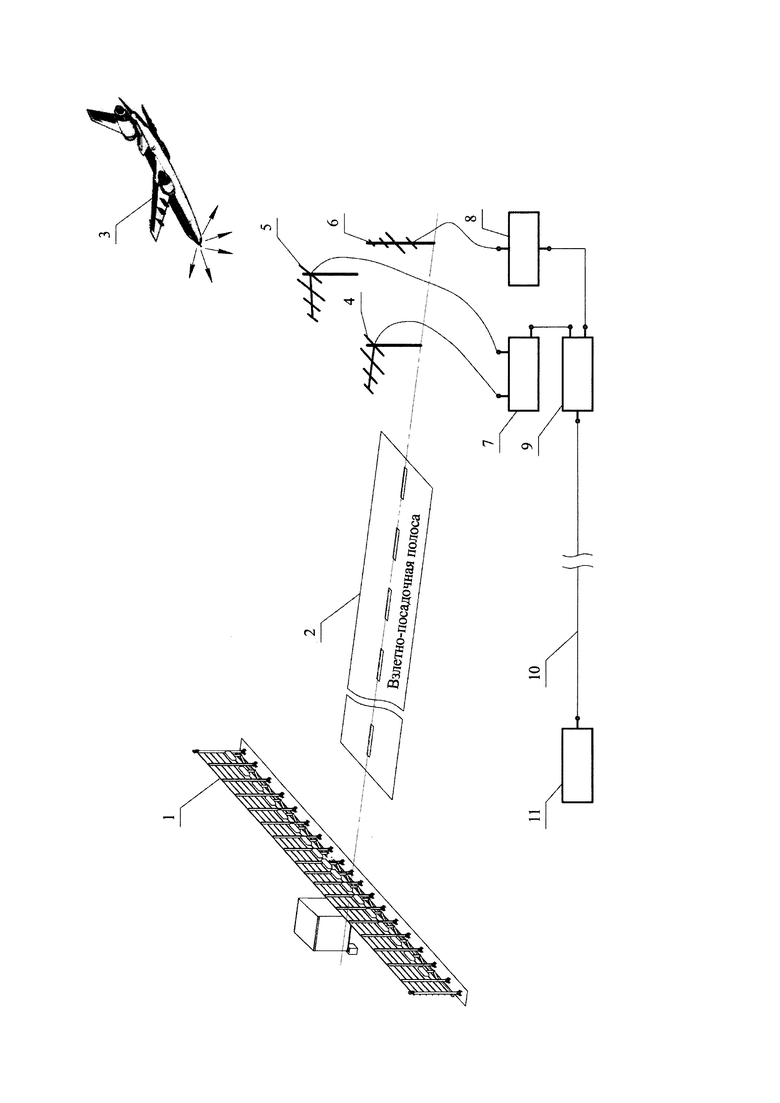
Способ и устройство дальнего контроля за положением линии курса, формируемой курсовым радиомаяком системы посадки, и величины отклонения снижающего самолета от оси взлетно-посадочной полосы в горизонтальной плоскости поясняются схемой расположения упомянутого устройства на местности на фиг.
На фиг. приняты следующие обозначения:
1 - курсовой радиомаяк системы посадки самолетов,
2 - взлетно-посадочная полоса,
3 - заходящий на посадку самолет,
4 - первая антенна,
5 - вторая антенна,
6 - третья антенна,
7 - первый измеритель сигналов посадки с первым и вторым входами и выходом,
8 - второй измеритель сигналов посадки с входом и выходом,
9 - вычислитель с первым и вторым входом и выходом,
10 - линия связи с командно-диспетчерским пунктом,
11 - информационный прибор.
Осуществление изобретения
Обратимся к фиг., на которой представлено устройство дальнего контроля за положением линии курса, формируемой курсовым радиомаяком системы посадки, и величины отклонения снижающего самолета от оси взлетно-посадочной полосы в горизонтальной плоскости (далее, устройство контроля) и схема расположения упомянутого устройства контроля на местности. Для определенности рассмотрим работу устройства контроля на примере его реализации для контроля за работой курсового радиомаяка метрового диапазона волн формата ILS. При изложении материалов будем пользоваться терминологией, принятой в документах Международной Организации Гражданской Авиации (ИКАО) [1].
Курсовой радиомаяк 1 (КРМ) установлен на продолжении оси взлетно-посадочной полосы, на стороне, противоположной стороне захода самолета на посадку (на расстоянии от 400 до 1150 м от торца ВПП). Антенна КРМ излучает в окружающее пространство электромагнитные волны в диапазоне частот от 108 до 111,975 МГц [1], модулированные по амплитуде сигналами тональных частот 90 и 150 Гц. В идеальном случае поверхность, на которой разность глубин модуляции (РГМ) сигналами равна нулю, представляет собой вертикальную плоскость, проходящую через ось ВПП (поверхность курса). Справа от поверхности курса (по направлению захода самолета) преобладает сигнал с глубиной модуляции несущей тональной частотой 150 Гц, а слева сигнал с глубиной модуляции несущей тональной частотой 90 Гц.
При удалении от плоскости курса РГМ возрастает. Таким образом, по величине РГМ можно судить о величине отклонения от линии курса, а по тому, глубина модуляции какой частоты (90 или 150 Гц) является преобладающей, о стороне отклонения.
Устройство контроля установлено на продолжении оси взлетно-посадочной полосы 2, на стороне захода самолета 3 на посадку, вдали от порога ВПП.
Устройство контроля содержит первую 4 антенну, вторую 5 антенну, третью 6 антенну, первый 7 измеритель сигналов посадки с первым и вторым входами и выходом, второй 8 измеритель сигналов посадки с входом и выходом, вычислитель 9 с первым и вторым входом и выходом, линия 10 связи с командно-диспетчерским пунктом и информационный прибор 11. Предпочтительно данное устройство установить в районе дальнего приводного радиомаяка (в первую очередь из практических соображений, связанных с наличием охраняемого участка местности), расположенного на удалении четырех км от порога ВПП. Первую 4 и вторую 5 антенны, первый 7 и второй 8 измерители сигналов посадки КРМ и линию связи 10 можно использовать из состава аппаратуры контроля дальнего поля КРМ, серийно выпускаемых отечественными предприятиями. В качестве третьей 6 дополнительной антенны можно использовать излучающий элемент антенной решетки КРМ или другую антенну, например, антенну типа волновой канал или логопериодическую антенну, которые применяют в КРМ формата ILS. Для радиомаяков дециметрового диапазона необходимы аналогичные измерители сигналов посадки и приемные антенны. Вычислитель может быть создан на основе микроконтроллеров или других устройств цифровой схемотехники. В качестве информационного прибора можно использовать дисплей персональной ЭВМ, на котором отображают измеренные параметры КРМ, отметку положения самолета относительно оси ВПП. В качестве линии связи можно использовать физические линии (телефонные линии связи ДПРМ и КДП), радиомодемы и другие типы связи.
При этом первая антенна установлена на продолжении оси взлетно-посадочной полосы и ориентирована в направлении на центр антенны КРМ. Вторая антенна вынесена с продолжения оси ВПП на некоторое расстояние, предпочтительно в точку, соответствующую примерно четверти сектора курса. Вторая антенна ориентирована в направлении на центр антенны КРМ. Третья антенна установлена на продолжении оси ВПП и ориентирована максимумом диаграммы направленности вверх.
Указанные устройства соединены следующим образом. Первая антенна соединена с первым входом первого измерителя сигналов посадки. Вторая антенна соединена со вторым входом первого измерителя сигналов посадки. Третья антенна соединена с входом второго измерителя сигналов посадки. Выход первого измерителя сигналов системы посадки соединен с первым входом вычислителя. Выход второго измерителя сигналов посадки соединен со вторым входом вычислителя, выход которого через линию связи соединен с информационным прибором на КДП.
Способ дальнего контроля реализуется следующим образом.
В точке контроля дальнего поля первой и второй антеннами, ориентированными в направлении на курсовой радиомаяк, принимают высокочастотные сигналы, излучаемые курсовым радиомаяком, измеряют параметры сигнала посадки. Третьей антенной, ориентированной максимумом диаграммы направленности в вертикальном направлении, принимают сигналы курсового радиомаяка, отраженные от заходящего на посадку самолета. В принятых третьей антенной высокочастотных сигналах измеряют разность глубин модуляции тонами 90 и 150 Гц. По измеренной РГМ вычисляют величину отклонения самолета от плоскости курса и от оси взлетно-посадочной полосы в горизонтальной плоскости и передают на командно-диспетчерский пункт информацию о величинах отклонения самолета и плоскости курса от оси ВПП и чувствительности к смещению.
Данный способ предполагает получение информации о заходящем на посадку самолете в некоторой точке, например, в районе дальнего приводного маяка (ДПРМ), находящейся от торца ВПП примерно на удалении 4 км. При этом, у пилота будет достаточно времени, чтобы выполнить указание диспетчера, сформированные с учетом предоставленной информации о положении самолета. Предлагаемый способ повысит безопасность выполнения посадки самолетов.
Устройство контроля работает следующим образом. Принятые первой и второй антеннами высокочастотные сигналы поступают на первый и второй входы первого измерителя сигналов 7, соответственно, с выхода которого информационные сигналы поступают на первый вход вычислителя 9. Высокочастотные сигналы от третьей антенны поступают на вход второго измерителя сигналов 8, с выхода которого информационные сигналы поступают на второй вход вычислителя 9. В вычислителе 9 производится вычисление величины отклонения пролетающего самолета относительно оси ВПП и величины отклонения плоскости курса относительно оси ВПП. С выхода вычислителя эти значения передаются через линию связи 10 на информационный прибор 11, установленный у диспетчера на КДП
Итак, принятые первой и второй антеннами сигналы поступают на вход первого измерителя параметров сигналов посадки, который определяет величину РГМ (0) в точке непосредственно на продолжении оси ВПП (при α0=0) и величину РГМ(α0) в точке расположения второй антенны на расстоянии α0 от оси ВПП (при α=α0). По найденным РГМ в двух точках вычислитель определит чувствительность S к смещению

В числителе формулы (1) следует брать знак минус, если в сигналах с первой и второй антенн преобладает один и тот же тон, 90 или 150 Гц. Если же в сигнале с первой антенны преобладает один тон, а в сигнале со второй антенны преобладает другой тон, то в числителе формулы (1) следует брать знак плюс.
Величина отклонения αсм линии курса найдется из соотношения (2):

Линия курса отклонена от оси ВПП на величину αсм вправо по заходу на посадку, если в принятом первой антенной сигнале преобладает тон 90 Гц, или влево, если в принятом сигнале преобладает тон 150 Гц.
Принятый третьей антенной сигнал поступают на вход второго измерителя параметров сигналов посадки, который определяет величину РГМ (αсам) в точке нахождения самолета в текущий момент времени (напротив устройства контроля). По величине РГМ (αсам) определяется отклонение самолета относительно плоскости курса, формируемой КРМ:

Положение самолета относительно оси ВПП αист определится как модуль алгебраической суммы величины отклонения линии курса относительно оси ВПП αсм и угла смешения самолета относительно линии курса αсам по формуле (4):

В формуле (4) следует брать знак плюс, если отклонения линии курса от оси ВПП и отклонения самолета от плоскости курса направлены в одну сторону, а знак минус, если указанные отклонения направлены в разные стороны.
Вычисленные величины αсм и αист с указанием сторон отклонения с помощью линии связи 10 передаются для отображения на информационном приборе на КДП. Дополнительно по линии связи передается информация о соотношении измеренных значений αсм и αист с величинами, установленными полями допуска на эти параметры.
Представленное выше продемонстрировано на примере контроля при работе с системой ILS. Однако все выкладки и выводы справедливы для КРМ дециметрового диапазона волн формата ПРМГ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство контроля за положением глиссады и координатами самолёта в дальней зоне | 2018 |
|
RU2692079C1 |
| СПОСОБ РЕГУЛИРОВКИ ИНФОРМАЦИОННОГО ПАРАМЕТРА КУРСО-ГЛИССАДНЫХ РАДИОМАЯКОВ И УСТРОЙСТВА ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2017 |
|
RU2695316C2 |
| Способ и радиомаяк системы инструментальной посадки с функцией проверки и калибровки бортовых приемников воздушных судов (варианты) | 2023 |
|
RU2816376C1 |
| ДВУХЧАСТОТНЫЙ КУРСОВОЙ РАДИОМАЯК (ВАРИАНТЫ) | 2013 |
|
RU2543083C1 |
| ДВУХЧАСТОТНЫЙ ГЛИССАДНЫЙ РАДИОМАЯК | 2016 |
|
RU2624263C1 |
| ДВУХЧАСТОТНЫЙ КУРСОВОЙ РАДИОМАЯК (ВАРИАНТЫ) | 2014 |
|
RU2575010C1 |
| ГЛИССАДНЫЙ РАДИОМАЯК ДЛЯ ЗАХОДА НА ПОСАДКУ ПО КРУТОЙ ТРАЕКТОРИИ (ВАРИАНТЫ) | 2016 |
|
RU2619071C1 |
| Глиссадный радиомаяк | 2023 |
|
RU2818668C1 |
| СПОСОБ ЛЕТНЫХ ПРОВЕРОК НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ И УСТРОЙСТВА ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2011 |
|
RU2501031C2 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
Группа изобретений относится к способу и устройству контроля за отклонением снижающегося самолета от оси взлетно-посадочной полосы (ВПП). Для контроля за отклонением снижающегося самолета принимают сигналы курсового радиомаяка двумя антеннами, расположенными определенным образом вблизи ВПП, измеряют параметры сигнала посадки, а также третьей антенной, ориентированной максимумом диаграммы направленности вверх, измеряют информационный параметр в отраженных от заходящего на посадку самолета сигналах, вычисляют величину отклонения от плоскости курса и от оси ВПП, передают информацию о величине отклонения в командно-диспетчерский пункт. Устройство содержит три антенны, два измерителя сигналов посадки, линию связи с командно-диспетчерским пунктом, информационный прибор. Обеспечивается повышение безопасности выполнения посадки самолетов. 2 н.п. ф-лы, 1 ил.
1. Способ контроля за отклонением снижающегося самолета от оси взлетно-посадочной полосы, заключающийся в том, что в точке контроля дальнего поля первой антенной, установленной на продолжении оси взлетно-посадочной полосы, и второй антенной, установленной сбоку от оси взлетно-посадочной полосы, и ориентированными в направлении на курсовой радиомаяк, принимают сигналы курсового радиомаяка, измеряют параметры сигнала посадки, дополнительно принимают с помощью третьей антенны, ориентированной максимумом диаграммы направленности в вертикальном направлении, сигналы курсового радиомаяка, отраженные от заходящего на посадку самолета, измеряют информационный параметр в отраженных сигналах, вычисляют величину отклонения самолета от формируемой плоскости курса и от оси взлетно-посадочной полосы, передают на командно-диспетчерский пункт информацию о величине отклонения самолета и плоскости курса от оси взлетно-посадочной полосы и о чувствительности к смещению.
2. Устройство контроля за отклонением снижающегося самолета от оси взлетно-посадочной полосы, содержащее первую и вторую антенны, первый измеритель сигналов посадки с первым и вторым входами и выходом, линию связи и информационный прибор, расположенный на командно-диспетчерском пункте, при этом первая антенна соединена с первым входом первого измерителя сигналов посадки, вторая антенна соединена со вторым входом первого измерителя сигналов посадки, первая и вторая антенны установлены в зоне контроля дальнего поля курсового радиомаяка, первая антенна установлена на продолжении оси взлетно-посадочной полосы, вторая антенна установлена сбоку от взлетно-посадочной полосы, первая и вторая антенны ориентированы в направлении на антенну курсового радиомаяка, отличающееся тем, что дополнительно содержит третью антенну, второй измеритель сигналов посадки с входом и выходом, вычислитель с первым и вторым входами и выходом, при этом третья антенна ориентирована максимумом диаграммы направленности вверх и соединена с входом второго измерителя сигналов посадки, выход первого измерителя сигналов системы посадки соединен с первым входом вычислителя, выход второго измерителя сигналов посадки соединен со вторым входом вычислителя, выход которого через линию связи соединен с информационным прибором.
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2496131C1 |
| СИСТЕМА И СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2468964C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2014 |
|
RU2598111C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ САМОЛЕТА ПРИ ЕГО ПОСАДКЕ | 2015 |
|
RU2584067C1 |
| US 4990921 A1, 05.02.1991. | |||

