Область техники, к которой относится изобретение
Изобретение относится к радиотехнике и может использоваться в радиомаячных системах (РМС) посадки метрового диапазона длин волн формата ILS (Instrument Landing System) для инструментального обеспечения захода на посадку и посадки самолетов. Курсовые радиомаяки (КРМ), входящие в упомянутые системы, формируют зону курса, предназначенную для управления самолетом в горизонтальной плоскости. КРМ в соответствии с настоящим изобретением позволяет обеспечить инструментальный заход самолетов на посадку и посадку самолетов при неблагоприятных для визуальной посадки метеорологических условиях.
Уровень техники
Антенная система КРМ ILS устанавливается на продолжении осевой линии взлетно-посадочной полосы (ВПП) у ее конца, противоположного ее порогу со стороны захода самолета на посадку. Антенна КРМ излучает в окружающее пространство электромагнитные волны в диапазоне частот 108-112 МГц, модулированные по амплитуде сигналами тональных частот f1=90 Гц, f2=150 Гц. В идеальном случае поверхность, на которой разность глубин модуляции (РГМ) сигналами f1 и f2 равна нулю, представляет собой вертикальную плоскость, проходящую через ось ВПП (поверхность курса). В реальных условиях аэродрома наблюдаются некая поверхность точек, в которых РГМ=0, уклоняющаяся от плоскости. В процессе эксплуатации первых РМС посадки в середине прошлого века была обнаружена связь между этими уклонениями (точностными характеристиками систем посадки (СП)) и размерами и расположением местных предметов на аэродроме, таких как здание аэровокзала, ангары, стоянки самолетов и др., а также формой рельефа местности в зоне захода самолетов на посадку. Причиной искривлений линии курса оказалась интерференция в области курса электромагнитных волн, отраженных от местных предметов, с электромагнитными волнами, формирующими поверхность курса. К точности ILS предъявляются высокие требования, которые на порядок превышают таковые к аэродромным навигационным и радиолокационным системам.
Естественным стремлением разработчиков РМС было сужение диаграмм направленности антенны КРМ в горизонтальной плоскости, при котором местные предметы облучались бы пренебрежимо малым уровнем сигналов КРМ [Watts, С.В., Jr. Instrument Landing Scrapbook / С.В., Jr. Watts. - Trafford Publishing, 2005. - стр.165 (392 p.p.), НИИ-33 / ВНИИРА. История становления и развития Всесоюзного НИИ радиоаппаратуры - СПб.: 2007. - 291 с.]. Однако пилоту трудно попасть в узкую зону. Международной организацией гражданской авиации установлены минимальные угловые размеры зоны действия системы КРМ [Приложение 10 к Конвенции о международной гражданской авиации. Авиационная электросвязь. Том 1. Радионавигационные средства. ИКАО, Монреаль (Канада), 2006. - 606 с.]: ±35° в азимутальной плоскости.
Проблема обеспечения, с одной стороны, высокой точности задания траектории полета путем сужения ДН антенны и, с другой стороны, обеспечения широких зон действия КРМ была решена в радиомаяках с двухчастотным режимом работы. При этом используется так называемый эффект захвата (capture effect). Двухчастотный режим КРМ предполагает формирование двух высокочастотных сигналов: основного - сигнала узкого канала (УК) и дополнительного - сигнала широкого канала (ШК). Задачей УК является формирование узких угловых зон: зоны курса в пределах ±2° относительно оси ВПП. В этих зонах задается линейная зависимость между величиной информационного параметра (РГМ) и угловым отклонением самолета от заданной траектории. Широкий канал обеспечивает пилота информацией во всей остальной зоне действия, "указывая" направление "правильного" движения к траектории снижения. При этом несущая частота сигнала ШК смещена относительно частоты сигнала УК на 5-15 кГц.
Путем формирования ДН специальной формы добиваются существенного превышения уровня сигналов УК по сравнению с уровнем сигналов ШК в пределах узкой зоны в окрестности линии курса (±2° относительно оси ВПП) и существенного превышения уровня сигналов ШК по сравнению с уровнем сигналов УК в пределах зоны наведения.
Точность КРМ непосредственно связана с характеристиками диаграмм направленности их антенн. Как известно, форма ДН антенной системы определяется амплитудным и фазовым распределением токов, питающих данную антенную систему. Положение в пространстве линии курса чувствительно к изменениям фазового и амплитудного распределений питающих токов. Так, например, при изменении положения линии курса на противоположном торце ВПП на величину более 3 м относительно ее в ту или иную сторону происходит переключение аппаратуры КРМ на резервный комплект. Поэтому, наряду с высокими требованиями к трактам формирования сигнала блоков СП, предъявляются и высокие требования к точности системы контроля параметров СП.
Традиционно для повышения достоверности контроля КРМ используют, во-первых, так называемый "встроенный контроль", выполняемый по сигналам, ответвляемым в фидерном тракте, во-вторых, апертурный контроль, выполняемый по сигналам КРМ, принимаемым зондами в ближней зоне антенны, и, в-третьих, вынесенный контроль, выполняемый по сигналам КРМ в промежуточной зоне АР (в зоне Френеля).
Существенные признаки настоящего технического предложения построения КРМ относятся к устройству апертурного контроля его выходных характеристик.
Известен первый двухчастотный КРМ, входящий в состав системы посадки СП-70 [Сосновский А.А., Хаймович И.А., Шолупов Е.И. Радиомаячные системы посадки самолетов, Москва, 1974].
Первый КРМ содержит первое устройство формирования сигнала "несущая плюс боковые частоты" узкого канала (НБЧ УК) (далее, первое устройство), второе устройство формирования сигнала "боковые частоты" узкого канала (БЧ УК) (далее, второе устройство), третье устройство формирования сигнала "несущая плюс боковые частоты" широкого канала (НБЧ ШК) (далее, третье устройство), четвертое устройство формирования сигнала "боковые частоты" широкого канала (БЧ ШК) (далее, четвертое устройство), первое распределительное устройство (РУ), второе распределительное устройство, первую линейную антенную решетку (АР) узкого канала, вторую линейную АР широкого канала, три датчика апертурного контроля. Сигналы узкого канала через первое распределительное устройство поступают на первую АР. Сигналы широкого канала через второе распределительное устройство поступают на вторую АР. АР узкого канала содержит 18 излучающих элементов, вблизи которых расположены 3 датчика, называемых иногда измерительными зондами. Далее будем использовать термин датчик.
Недостатком первого КРМ является недостоверный апертурный контроль, т.к. контролю подвергается лишь три из 18 излучающих элементов АР.
Известно устройство апертурного контроля КРМ, которое работает автономно, без гальванической связи с остальными устройствами КРМ [US 4,107,688 Andrew Alford. Monitor for localizer antenna arrays].
В упомянутом устройстве апертурного контроля число датчиков равно числу излучающих элементов в АР. Недостатком рассматриваемого устройства апертурного контроля является слишком сложное устройство суммирования сигналов датчиков. Сложность устройства обусловлена необходимостью обеспечить равные комплексные коэффициенты передачи от каждого датчика до выхода оконечного сумматора. По сути, фидерный тракт устройства апертурного контроля по количеству входящих в него элементов превышает количество элементов контролируемого тракта. Сложность настройки устройства апертурного контроля превышает сложность настройки распределителя сигналов КРМ. Поскольку надежность устройства обратно пропорциональна количеству элементов в устройстве, то оказывается, что надежное устройство-распределитель контролируется менее надежным устройством - устройством суммирования сигналов датчиков. Ситуация усугубляется при реализации предложенного принципа в двухчастотном КРМ. В двухчастотном КРМ необходимо контролировать наряду с контролем положения курсовой линии ("0" РГМ) и крутизны зоны по узкому каналу (Sук) еще один параметр - крутизну зоны по широкому каналу (Sшк).
Известен третий двухчастотный КРМ (СП-90, радиомаяк курсовой (РМК). Техническое описание ИЦРВ.461512.019ТО, НИИИТ-РТС, 1996-1999).
Известный третий КРМ содержит первое устройство формирования сигнала "несущая плюс боковые частоты" узкого канала (НБЧ УК) (далее, первое устройство), второе устройство формирования сигнала "боковые частоты" узкого канала (БЧ УК) (далее, второе устройство), третье устройство формирования сигнала "несущая плюс боковые частоты" широкого канала (НБЧ ШК) (далее, третье устройство), четвертое устройство формирования сигнала "боковые частоты" широкого канала (БЧ ШК) (далее, четвертое устройство), распределительное устройство (РУ) с четырьмя входами и 16 выходами, линейную антенную решетку (АР) из 16 излучающих элементов, расположенных симметрично относительно центра АР, 16 датчиков с кабелями снижения, фазирующих отрезков кабеля, сумматор сигналов, измеритель разности глубин модуляции (РГМ), согласованные нагрузки; при этом датчики расположены вблизи излучающих элементов АР.
Существенным недостатком известного третьего КРМ является сложность сумматора.
Сложность упомянутых выше устройств обусловлена тем, что их работа основана на принципе параллельного суммирования сигналов.
Известно устройство формирования сигналов апертурного контроля КРМ [Заявка №2012119089/08(028764)], в котором прием и суммирование сигналов выполняется коаксиальным волноводом с излучающими щелями, длина волны принимаемых сигналов в котором равна шагу антенной решетки. Коаксиальный волновод с излучающими щелями при этом выполняет две функции: функцию датчиков и функцию сумматора. Реализация этих двух функций обеспечивается выбором шага антенной решетки, равным длине волны в кабеле. Это устройство устраняет недостатки упомянутых выше КРМ, заключающиеся в чрезвычайной сложности суммирующего устройства.
Недостатком устройства по заявке №2012119089/08(028764) является то, что оно не может быть применено в случае неэквидистантной АР. Это сужает область применения указанного устройства. Известно, что применение неэквидистантного расположения излучающих элементов позволяет оптимизировать характеристики антенных решеток. Так применение неэквидистантного расположения ИЭ в АР КРМ СП-90 позволило уменьшить число ИЭ в решетке на 2 ИЭ без ухудшения параметров КРМ в зоне его действия.
Известны другие технические решения построения КРМ:
US 8,239,077 B2 Alexandre Colomer. Method and device for detecting noise on a guide signal of LOC type received by an aircraft.
US 6,414,632 July 2, 2002. Kleiber Monitoring of the phase angle of course and clearance signals in instrument landing system.
US 5,323,165 Jun. 21, 1994 Gerhard Greving. Two-frequency transmitting apparatus with tone-modulation phasing for an Instrument Landing System.
US 4,907,005 Mar.6, 1990. Robert W. Redlich. Radiofrequency power distributor for Instrument Landing System localizer antenna arrays.
US 4,068,236 June 22, 1978 Andrew Alford Monitor for two frequency localizer guidance system.
US 3,711,857 Jan.16 1973. Willian C. Cummings. Capture effect system.
US 2,293,694 Aug.25 1942. Andrew Alford. Directive radio system for guiding arrangements.
Их общим недостатком является сложность фидерного тракта устройства апертурного контроля, обусловленная параллельным суммированием сигналов, поступающих с датчиков.
Авторы принимают в качестве прототипа третий известный КРМ.
Раскрытие изобретения
Целью настоящего изобретения является повышение надежности КРМ, снижение трудоемкости изготовления и настройки фидерного тракта апертурного контроля, снижение себестоимости изготовления КРМ за счет меньшего количества СВЧ элементов фидерного тракта по сравнению с аналогами.
Поставленная цель достигается тем, что в КРМ по первому варианту, содержащему первое устройство формирования сигнала "несущая плюс боковые частоты" узкого канала (НБЧ УК) (далее, первое устройство), второе устройство формирования сигнала "боковые частоты" узкого канала (БЧ УК) (далее, второе устройство), третье устройство формирования сигнала "несущая плюс боковые частоты" широкого канала (НБЧ ШК) (далее, третье устройство), четвертое устройство формирования сигнала "боковые частоты" широкого канала (БЧ ШК) (далее, четвертое устройство), линейную антенную решетку (АР) 2N (где N - целое число, большее или равное двум) излучающих элементов, расположенных симметрично относительно центра АР N левых 1лев, 2лев, …, Nлев и N правых 1пр, 2пр, …, Nпр излучающих элементов, причем счет левых и правых излучающих элементов выполняется от центра антенной решетки к левому и правому краю АР, соответственно, распределительное устройство (РУ) с четырьмя входами и 2N выходами, N левых и N правых датчиков с кабелями снижения, при этом датчики расположены вблизи излучающих элементов АР, причем датчик имеет тот же номер, что и номер излучающего элемента АР, устройство измерения информационного параметра - разности глубин модуляции (РГМ) с тремя входами, дополнительно содержит направленный ответвитель (НО) сигналов узкого канала (НО УК), направленный ответвитель сигналов широкого канала (НО ШК), N-1 левых направленных ответвителей (НО) на связанных линиях, N-1 правых НО на связанных линиях, 2N-4 фазирующих отрезков кабеля, делитель мощности с первым и вторым выходами, фиксированный фазовращатель на 90°, мост, первый сумматор с первым и вторым входами, второй сумматор с первым и вторым входами.
Введение в состав КРМ дополнительно N-1 левых НО на связанных линиях, N-1 правых НО на связанных линиях, 2N-4 фазирующих отрезков кабеля, делитель мощности с первым и вторым выходами, фиксированного фазовращателя на 90° и моста позволило выполнить последовательное суммирование сигналов от контрольных датчиков и тем самым упростить устройство суммирования сигналов от контрольных датчиков по сравнению с устройством, использующим принцип параллельного суммирования сигналов. Введение в состав КРМ направленного ответвителя (НО) сигналов узкого канала (НО УК), направленного ответвителя сигналов широкого канала (НО ШК), фиксированный фазовращатель на 90°, моста, первого сумматора с первым и вторым входами, второго сумматора с первым и вторым входами позволило с помощью простых в изготовлении устройств реализовать контроль крутизны зоны по узкому и широкому каналам. Указанные преимущества достигаются благодаря использованию левого суммирующего устройства (ЛСУ) и правого суммирующего устройства (ПСУ) для суммирования всех сигналов КРМ, а также благодаря тому, что для измерения крутизны зоны по узкому и по широкому каналам выполнен отбор мощности от первого и третьего устройств.
Во втором варианте двухчастотного КРМ по настоящему изобретению содержит первое устройство формирования сигнала НБЧ УК (далее, первое устройство), второе устройство формирования сигнала БЧ УК (далее, второе устройство), третье устройство формирования сигнала НБЧ ШК (далее, третье устройство), четвертое устройство формирования сигнала БЧ ШК (далее, четвертое устройство), линейную антенную решетку (АР) 2N+1, где N - целое число, большее или равное двум, излучающих элементов, из расположенных симметрично относительно центра АР N левых (1лев, 2лев, …, Nлев), N правых (1пр, 2пр, …, Nпр) излучающих элементов, причем счет левых и правых излучающих элементов выполняется от центра антенной решетки к левому и правому краю АР, соответственно, и расположенного в центре АР излучающего элемента с номером 0, кроме того, содержит первый делитель мощности с первым и вторым выходом, распределительное устройство (РУ) с четырьмя входами и 2N+1 выходами, N левых и N правых датчиков и датчик излучающего элемента с номером 0, при этом датчики расположены вблизи излучающих элементов АР, причем датчик имеет тот же номер, что и номер излучающего элемента АР, устройство измерения информационного параметра-разности глубин модуляции (РГМ) с тремя входами, дополнительно содержит направленный ответвитель (НО) сигналов узкого канала (НО УК), направленный ответвитель сигналов широкого канала (НО ШК), N левых направленных ответвителей на связанных линиях (НО), N правых НО на связанных линиях, 2N-2 фазирующих отрезков кабеля, первый делитель мощности с первым и вторым выходами, второй делитель мощности с первым и вторым выходами, фиксированный фазовращатель на 90°, мост, первый сумматор с первым и вторым входами, второй сумматор с первым и вторым входами.
Применение во втором варианте курсового радиомаяка линейной антенной решетки с 2N+1 излучающими элементами, распределительного устройства (РУ) с четырьмя входами и 2N+1 выходами, N+1 левых направленных ответвителей на связанных линиях (НО), N+1 правых НО на связанных линиях, 2N-2 фазирующих отрезков кабеля и дополнительно в сравнении с первым вариантом второго делителя мощности позволило получить ДН с меньшим уровнем боковых лепестков по узкому каналу, тем самым снизить уровень облучения местных предметов и вследствие этого уменьшить величину искривлений линии курса.
Решение этих и других задач поясняется далее текстом и рисунками на фигурах.
Краткое описание чертежей
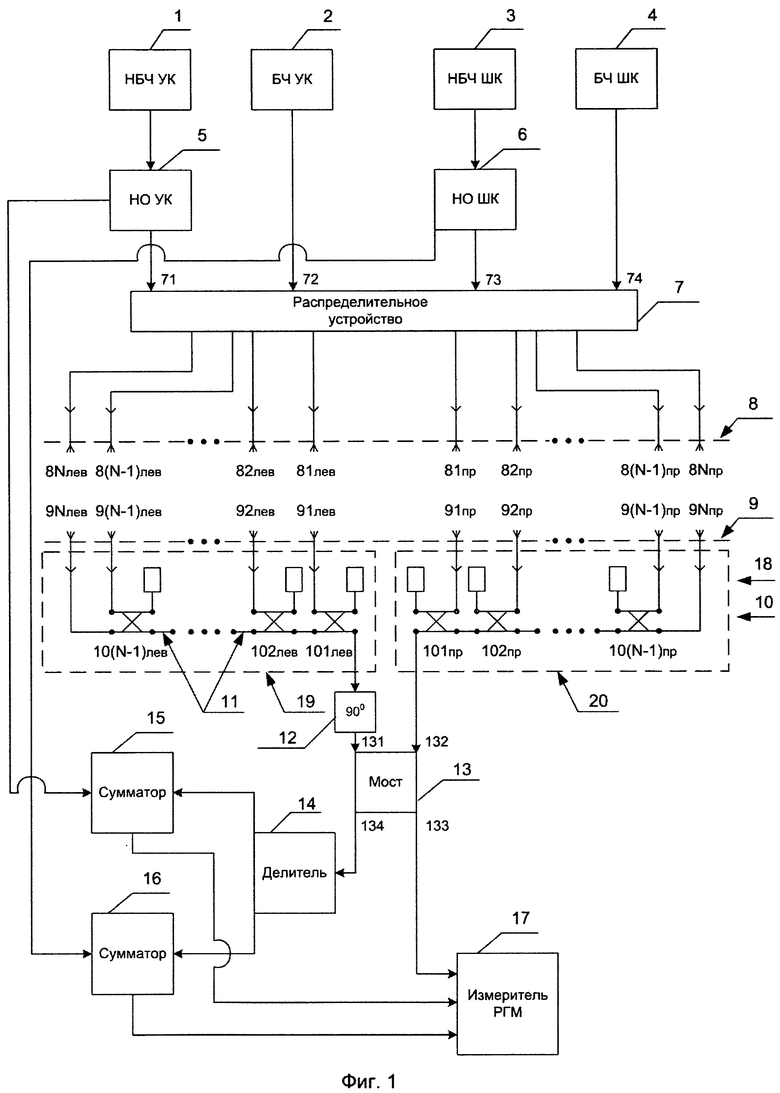
На фиг.1 представлена структурная электрическая схема КРМ в соответствии с настоящим изобретением по первому варианту.
На упомянутой схеме указаны следующие устройства:
1 - первое устройство формирования сигнала "несущая плюс боковые частоты" узкого канала (НБЧ УК),
2 - второе устройство формирования сигнала "боковые частоты" узкого канала (БЧ УК),
3 - третье устройство формирования сигнала "несущая плюс боковые частоты" широкого канала (НБЧ ШК),
4 - четвертое устройство формирования сигнала "боковые частоты" широкого канала (БЧ ШК),
5 - направленный ответвитель (НО) сигналов узкого канала (НО УК),
6 - направленный ответвитель сигналов широкого канала (НО ШК),
7 - распределительное устройство (РУ),
8 - линейную антенную решетку (АР),
9 - N левых и N правых датчиков с кабелями снижения,
10 - направленные ответвители (НО) на связанных линиях передачи,
11 - фазирующие отрезки кабеля,
12 - фиксированный фазовращатель,
13 - мост,
14 - делитель мощности,
15 - первый сумматор,
16 - второй сумматор,
17 - измеритель разности глубин модуляции (РГМ),
18 - согласованные нагрузки,
19 - левое суммирующее устройство (ЛСУ),
20 - правое суммирующее устройство (ПСУ).
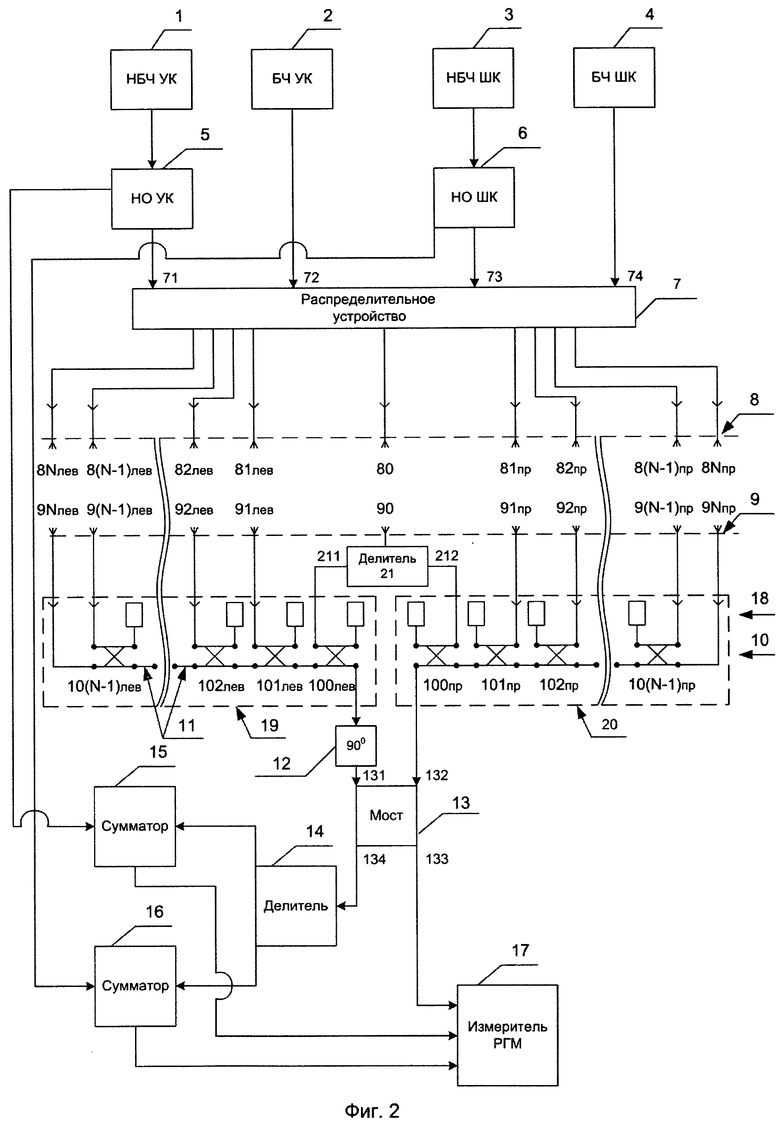
На фиг.2 представлена структурная электрическая схема второго варианта КРМ в соответствии с настоящим изобретением.
Упомянутая схема дополнительно к устройствам на фиг.1 содержит:
80 - центральный излучающий элемент АР,
90 - датчик центрального излучателя АР,
21 - делитель мощности,
100лев - нулевой по счету левый НО,
100пр - нулевой по счету правый НО.
Осуществление изобретения
Обратимся к фиг.1, на которой представлена структурная электрическая схема двухчастотного курсового радиомаяка (КРМ) в соответствии с настоящим изобретением по первому варианту.
КРМ содержит первое устройство формирования сигнала "несущая плюс боковые частоты" узкого канала (НБЧ УК) (далее, первое устройство 1), второе устройство формирования сигнала "боковые частоты" узкого канала (БЧ УК) (далее, второе устройство 2), третье устройство формирования сигнала "несущая плюс боковые частоты" широкого канала (НБЧ ШК) (далее, третье устройство 3), четвертое устройство формирования сигнала "боковые частоты" широкого канала (БЧ ШК) (далее, четвертое устройство 4), направленный ответвитель (НО) сигналов узкого канала (НО УК) 5, направленный ответвитель сигналов широкого канала (НО ШК) 6, распределительное устройство (РУ) 7 с четырьмя входами 71-74 и 2N выходами, линейную антенную решетку (АР) 8 из 2N (здесь и далее, N - целое число, большее или равное двум, n - порядковый номер устройства в однородной группе устройств: излучающих элементов АР, датчиков, НО, согласованных нагрузок, n≥1; нижний индекс номера указывает сторону расположения устройства относительно центра АР) излучающих элементов, расположенных симметрично относительно центра АР: N левых 1лев, 2лев, …, nлев, …, Nлев и N правых 1пр, 2пр, …, nпр, …, Nпр излучающих элементов, причем счет левых и правых излучающих элементов выполняется от центра антенной решетки АР к ее левому и правому краю, соответственно, N левых и правых датчиков 9 с кабелями снижения, при этом датчики расположены вблизи излучающих элементов АР, причем датчик имеет тот же номер, что и номер излучающего элемента АР, N-1 левых направленных ответвителей (НО) 10 на связанных линиях, N-1 правых НО 10 на связанных линиях 10, 2N-4 фазирующих отрезков кабеля 11, фиксированный фазовращатель 12 на 90°, мост 13, делитель мощности 14 с первым и вторым выходами, первый сумматор 15 с первым и вторым входами, второй сумматор 16 с первым и вторым входами, измеритель разности глубин модуляции (РГМ)) 17 с тремя входами, 2N-2 согласованных нагрузок 18.
Первое 1, второе 2, третье 3 и четвертое 4 устройства представляют собой генераторы, формирующие указанные выше сигналы. Эти устройства выполнены, например, так, как они выполнены в серийных радиомаяках метрового диапазона волн СП-90, выпускаемых Челябинским радиозаводом "Полет" и эксплуатируемых на аэродромах гражданской авиации. НО 5, 6, 10, мост 13, делитель 14, сумматоры 15, 16 широко известны, построены на основе связанных полосковых линий передачи. НО представляет собой четырехплечное устройство, образованное двумя связанными линиями передачи. Линия, к плечу которой подключен источник, называется главной линией, другая линия называется связанной линией. Электромагнитная энергия от источника распределяется между выходным плечом главной линии и одним из плеч связанной линии. На второе плечо связанной линии энергия не поступает. Это плечо называют развязанным плечом. НО характеризуется коэффициентом связи K по напряжению, равным корню квадратному из отношения мощности в плече связанной линии к мощности на входе НО. Мощность на выходе главной линии равна входной мощности, умноженной на 1-K2. Распределительное устройство представляет собой многополюсник, выполненный на основе полосковых устройств, рассчитанных по формулам из известных справочников. Линейная АР может содержать от 12 до 24 и более излучающих элементов. В качестве излучающих элементов АР могут использоваться горизонтально ориентированные полуволновые вибраторы или широкополосные симметричные вибраторы (патент РФ на изобретение №2357337) с общим рефлектором, логопериодические антенны без рефлектора, антенны типа "волновой канал" и др. Датчики 9 применяют в виде коротких по сравнению с длиной волны вибраторов (Л.Я. Ильинский, А.А. Болбот. Антенные устройства аэропортов гражданской авиации. М.: Транспорт. - 1983. - с.53 (191).) либо в виде рамок (US patent №4,107,688). Фазирующие отрезки выполняют из стандартного фазостабильного кабеля, такого как, например, РК-50-7-58C. В качестве фиксированного фазовращателя на 90° может быть применен четвертьволновый отрезок стандартного кабеля. Измеритель РГМ представляет собой приемник высокочастотных сигналов, в котором после детектирования принятых сигналов выделяют с помощью полосовых фильтров сигналы тональной модуляции 90 Гц и 150 Гц. Сравнением амплитуд сигналов с частотами 90 Гц и 150 Гц определяют разность глубин модуляции. Измерители РГМ широко применяются в практике эксплуатации радиомаяков системы посадки самолетов.
При этом выход первого устройства 1 последовательно соединен с НО УК 5 и первым входом 71 РУ 7, второе устройство 2 соединено со вторым входом 72 РУ 7, третье устройство 3 последовательно соединено с НО ШК 6 и третьим входом 73 РУ 7, четвертое устройство 4 соединено с четвертым входом 74 РУ 7, выходы РУ 7 соединены с излучающими элементами АР 8; левые НО с помощью фазирующих отрезков кабеля 11 последовательно соединены друг с другом с образованием левого суммирующего устройства (ЛСУ) 19, входом которого служит вход НО с номером (N-1)лев, а выходом служит выход НО с номером 1л; правые НО с помощью фазирующих отрезков кабеля 11 последовательно соединены друг с другом с образованием правого суммирующего устройства (ПСУ) 20, входом которого служит вход НО с номером (N-1)пр, а выходом служит выход НО с номером 1пр; датчик Nлев соединен со входом ЛСУ 19, датчик (N-1)лев и предшествующие датчики соединены с развязанными плечами НО с совпадающими номерами; выход ЛСУ 19 соединен последовательно с фиксированным фазовращателем и первым входом моста 13, правый датчик Nпр соединен со входом ПСУ 20, правый датчик (N-1)пр и предшествующие правые датчики соединены с развязанными выходами НО с совпадающими номерами; выход ПСУ соединен последовательно со вторым входом моста 13, первый выход которого соединен с первым входом измерителя РГМ 17, а второй выход моста 13 соединен с делителем мощности 14, первый выход которого соединен последовательно с первым входом первого сумматора 16 и вторым входом устройства измерения РГМ 17, а второй выход соединен последовательно с первым входом второго сумматора 16 и третьим входом устройства измерителя РГМ; выход связанной линии НО УК 5 соединен со вторым входом первого сумматора 15, выход связанной линии НО ШК 6 соединен со вторым входом второго сумматора 16, согласованные нагрузки 18 соединены с плечами НО 10.
Двухчастотный КРМ по настоящему изобретению работает следующим образом.
Первое устройство 1 формирует сигналы НБЧ УК 

которые по главной линии НО УК 5 поступают на первый вход 71 РУ 7. Второе устройство формирует сигналы БЧ 

которые поступают на второй 72 вход РУ. Третье устройство 3 формирует сигналы НБЧ ШК:

которые по главной линии НО ШК 6 поступают на третий вход 73 РУ 7.
Четвертое устройство формирует сигналы БЧ ШК 

которые поступают на четвертый вход 74 РУ 7.
Где:
m - глубина модуляции сигнала УК (ШК) на входе антенны,

t - время,
ωук - угловая частота несущей сигнала узкого канала,
ωшк - угловая частота несущей сигнала широкого канала.
РУ распределяет поступившие сигналы следующим образом. На входы излучающих элементов с одинаковыми номерами nлев=nпр поступают:
- синфазные сигналы НБЧ УК с равными амплитудами:

- противофазные сигналы БЧ УК с равными амплитудами:

- синфазные сигналы НБЧ ШК с равными амплитудами:

- противофазные сигналы БЧ ШК с равными амплитудами

В приведенных соотношениях 
Датчики, расположенные в окрестности излучающих элементов АР, извлекают из электромагнитного поля сигналы НБЧ УК, БЧ УК, НБЧ ШК, БЧ ШК (коэффициент передачи ИЭ-датчик на уровне минус 25 дБ). При этом нормированное амплитудно-фазовое распределение упомянутых сигналов на выходе датчиков повторяет нормированное амплитудно-фазовое распределение упомянутых сигналов на излучающих элементах АР. Сигналы с левых датчиков поступают на ЛСУ, сигналы с правых датчиков поступают на ПСУ. Задачей ЛСУ и ПСУ является суммирование сигналов так, как они суммируются в пространстве в дальней зоне АР на оси ВПП. Для решения этой задачи необходимо, во-первых, чтобы сигналы от всех датчиков имели бы одно и то же ослабление, и, во-вторых, все сигналы на выходе ЛСУ и на выходе ПСУ были бы синфазны. Равное ослабление сигналов в ЛСУ, равно как и в ПСУ, обеспечивается тем, что НО с разными номерами n имеют разные коэффициенты связи. Обозначим αn как коэффициент передачи по напряжению сигнала с n-го датчика на выход ЛСУ (ПСУ). Очевидно, что αn будет равен произведению коэффициента связи n-го датчика и коэффициентов передачи n-1 НО, расположенных на участке пути распространения сигнала от упомянутого датчика до выхода ЛСУ:
Требование равенства коэффициентов передачи от каждого датчика на выход ЛСУ (ПСУ) сводится к равенству:

Из равенства

следует рекуррентное соотношение для значений коэффициентов передачи НО:

Длины соединительных кабелей от датчиков до НО одинаковы, и, стало быть, одинаково затухание во всех указанных соединительных кабелях. Поэтому, потери в кабелях можно не принимать во внимание, а коэффициент связи N-го датчика с ЛСУ (ПСУ), KN, принять равным 1. Тогда:

Т.е. коэффициент связи (N-1)-го НО должен быть равным минус 3 дБ. Коэффициенты связи предыдущих по номерам НО определяются по рекуррентному соотношению.
Длины фазирующих отрезков кабеля 11 определены из условия синфазного сложения сигналов от всех левых датчиков на выходе ЛСУ и от всех правых датчиков на выходе ПСУ. При этом учтено, что волна в кабеле распространяется медленнее, чем в свободном пространстве в 

Сигналы UЛСУ на выходе ЛСУ равны:
Сигналы на выходе ПСУ равны:
где (a n ук)лев, (bn укei90°)лев, (a n ук)пр, (bn укei90°)пр - относительные амплитуды и фазы токов сигналов УК левых и правых датчиков,
(a n шк)лев, (bn шкei90°)лев, (a n шк)пр, (bn шкei90°)пр - относительные амплитуды и фазы токов сигналов ШК левых и правых датчиков.
Сигналы с выхода ЛСУ поступают через фиксированный фазовращатель 90° на первый вход 131 моста 13. В качестве моста применен направленный 3 дБ НО, который поступающие на его первый вход 131 сигналы без изменения фазы ответвляет на первый выход 133 моста и задерживает сигналы ЛСУ на втором 134 выходе моста на 90°. Сигналы ПСУ поступают на второй 132 вход моста 13. Сигналы ПСУ без изменения фазы ответвляются на второй выход 134 моста и с задержкой на 90° поступают на первый 133 выход моста 13. В результате сигналы ЛСУ и ПСУ синфазно складываются на первом 133 выходе и противофазно на втором 134 выходе моста. В результате, на первом 133 выходе моста 13 сигналы суммируются синфазно. Суммарный сигнал U133 равен:
На втором 134 выходе моста 13 сигналы суммируются противофазно. Суммарный сигнал U134 равен:

При идеальной настройке и идеальной работе КРМ:


Следовательно, при идеальной настройке КРМ:


Тогда:



Сигналы с первого выхода моста поступают на первый вход измерителя РГМ с наименованием "O" РГМ. Поскольку в идеальном случае в сигнале с первого 133 выхода моста отсутствует сигнал БЧ, т.е. РГМ сигнала равна нулю, то измеритель РГМ зафиксирует нулевые значения РГМ. В том случае, когда по какой-либо причине, например, в случае выхода из строя какого-либо излучающего элемента, наличия слоя мокрого снега на излучающем элементе и др. на выходе моста в составе суммарного сигнала появится сигнал БЧ. В этом случае измеритель РГМ зафиксирует отличную от нулевого значения величину РГМ. Причем это значение окажется равным значению РГМ в точках в дальней зоне АР на оси ВПП.
Сигналы со второго 134 выхода моста, содержащие в идеальном случае лишь сигналы БЧ УК и БЧ ШК, поступают на вход делителя, с выхода которого поступают на первый вход первого сумматора и на первый вход второго сумматора. Ответвленный в НО УК 5 НБЧ УК сигнал поступает на второй вход первого сумматора, выход которого соединен со вторым входом измерителя РГМ с наименованием "Sук". Ответвленный в НО ШК 6 НБЧ ШК сигнал поступает на второй вход второго сумматора, выход которого соединен с третьим входом измерителя РГМ с наименованием "Sшк". На выходе первого сумматора может быть сформирован сигнал, РГМ которого по узкому каналу равен значению РГМ в пределах от 10% до 20%. Сигнал широкого канала со второго входа измерителя РГМ отфильтровывается упомянутым устройством, этот сигнал не оказывает влияние на измерения РГМ УК. При возникновении ошибок в амплитудно-фазовом распределении токов в излучающих элементах АР, соответствующим сигналам УК измеритель РГМ покажет отклонение показания измерителя РГМ от ранее установленного значения. Если отклонения показания измерителя РГМ не превысят 25% от заранее установленного значения РГМ для индикации крутизны зоны по узкому каналу, КРМ продолжит работу в обычном режиме, в противном случае измеритель КРМ выдаст сигнал предупреждения о нарушении в работе КРМ.
На выходе второго сумматора может быть сформирован сигнал, РГМ которого по широкому каналу равен РГМ в пределах от 10% до 20%. Сигнал узкого канала с третьего входа измерителя РГМ отфильтровывается упомянутым устройством, этот сигнал не оказывает влияние на измерения РГМ ШК. При возникновении ошибок в амплитудно-фазовом распределении токов в излучающих элементах АР, соответствующем сигналам ШК измеритель РГМ покажет отклонение показания измерителя РГМ от ранее установленного значения РГМ ШК. Если отклонения показания измерителя РГМ не превысят 25% от заранее установленного значения РГМ для индикации крутизны зоны по широкому каналу, КРМ продолжит работу в обычном режиме, в противном случае измеритель КРМ выдаст сигнал предупреждения о нарушении в работе КРМ. Таким образом, если в процессе эксплуатации КРМ появятся отклонения (дефекты) в амплитудно-фазовом распределении токов АР КРМ, то это приведет к изменению контролируемых величин РГМ: "0", Sук, Sшк. Система допускового контроля, исходя из сопоставления этих изменений с допусками, принимает решение либо продолжить эксплуатацию КРМ, либо выполнить отключение КРМ.
Примеры реализации КРМ по первому варианту
В качестве конкретной реализации технического предложения рассмотрим КРМ с 16-ти элементной антенной решеткой для работы на частоте 110 МГц. Фазирующие отрезки кабеля изготовлены из фазостабильного кабеля РК-50-7-58C. Расстояния между излучающими элементами АР приведены в табл.1.
Коэффициент укорочения длины волны в кабеле РК-50-7-58C равен 1,1.
Следовательно, длина волны в кабеле λк на частоте 110 МГц равна:

При этом:

Отрезок кабеля длиной 


Для построения ЛСУ и ПСУ применены 7 пар направленных ответвителей с коэффициентами связи, указанными в табл.2.
Потери электромагнитной энергии в фидере определяются коэффициентом затухания кабеля РК-50-7-58C на частоте 110 МГц, равным 
Обратимся теперь к фиг.2, на которой представлен второй вариант двухчастотного КРМ для обеспечения инструментального захода на посадку и посадки самолетов, содержащий первое устройство формирования сигнала НБЧ УК (далее, первое устройство), второе устройство формирования сигнала БЧ УК (далее, второе устройство), третье устройство формирования сигнала НБЧ ШК (далее, третье устройство), четвертое устройство формирования сигнала БЧ ШК (далее, четвертое устройство), линейную антенную решетку (АР) 2N+1, где N - целое число, большее или равное двум, излучающих элементов, из расположенных симметрично относительно центра АР N левых (1лев, 2лев, …, Nлев), N правых (1пр, 2пр, …, Nпр) излучающих элементов, причем счет левых и правых излучающих элементов выполняется от центра антенной решетки к левому и правому краю АР, соответственно, и расположенного в центре АР излучающего элемента с номером 0, кроме того, содержит первый делитель мощности с первым и вторым выходом, распределительное устройство (РУ) с четырьмя входами и 2N+1 выходами, N левых и N правых датчиков и датчик излучающего элемента с номером 0, при этом датчики расположены вблизи излучающих элементов АР, причем датчик имеет тот же номер, что и номер излучающего элемента АР, устройство измерения информационного параметра - разности глубин модуляции (РГМ) с тремя входами, дополнительно содержит направленный ответвитель (НО) сигналов узкого канала (НО УК), направленный ответвитель сигналов широкого канала (НО ШК), N левых направленных ответвителей на связанных линиях (НО), N правых НО на связанных линиях, 2N-2 фазирующих отрезков кабеля, первый делитель мощности с первым и вторым выходами, второй делитель мощности с первым и вторым выходами, фиксированный фазовращатель на 90°, мост, первый сумматор с первым и вторым входами, второй сумматор с первым и вторым входами.
При этом выход первого устройства последовательно соединен с НО УК и первым входом РУ, второе устройство соединено со вторым входом РУ, третье устройство последовательно соединено с НО ШК и третьим входом РУ, четвертое устройство соединено с четвертым входом РУ, выходы РУ соединены с излучающими элементами АР; левые НО с помощью фазирующих отрезков кабеля последовательно соединены друг с другом с образованием левого суммирующего устройства (ЛСУ), входом которого служит вход НО с номером (N-1)лев, а выходом служит выход НО с номером 0лев; правые НО с помощью фазирующих отрезков кабеля последовательно соединены друг с другом с образованием правого суммирующего устройства (ПСУ), входом которого служит вход НО с номером (N-1)пр, а выходом служит выход НО с номером 0пр; датчик с номером 0 соединен с первым делителем мощности, первый выход которого соединен развязанным выходом НО с номером 0лев, а второй выход соединен с развязанным выходом НО с номером 0пр; датчик Nлев соединен со входом ЛСУ, датчики с номерами с (N-1)лев по 1лев соединены с развязанными плечами НО с совпадающими номерами; выход ЛСУ соединен с первым входом моста, датчик Nпр соединен со входом ПСУ, правые датчики с номерами с (N-1)пр по 1пр соединены с развязанными выходами НО с совпадающими номерами; выход ПСУ соединен последовательно с фиксированным фазовращателем и вторым входом моста, первый выход которого соединен с первым входом устройства измерения РГМ, а второй выход моста соединен с делителем мощности, первый выход которого соединен последовательно с первым входом первого сумматора и вторым входом устройства измерения РГМ, а второй выход соединен последовательно с первым входом второго сумматора и третьим входом устройства измерения РГМ; выход связанной линии НО УК соединен со вторым входом первого сумматора, выход связанной линии НО ШК соединен со вторым входом второго сумматора, согласованные нагрузки соединены с плечами НО, в которые поступает связанная мощность. Величина коэффициента связи Кn левого и правого НО с одинаковыми номерами n одна и та же и должна быть равной величине, вычисляемой по следующей формуле Длины фазирующих отрезков кабеля выбираются из условия синфазного сложения сигналов от всех левых датчиков на выходе ЛСУ и от всех правых датчиков на выходе ПСУ.
Двухчастотный КРМ по второму варианту работает следующим образом. Первое устройство 1 формирует сигналы НБЧ УК

- синфазные сигналы НБЧ УК с равными амплитудами:

- противофазные сигналы БЧ УК с равными амплитудами:

- синфазные сигналы НБЧ ШК с равными амплитудами:

- противофазные сигналы БЧ ШК с равными амплитудами

В центральный излучатель (n=0) поступают сигналы НБЧ УК и НБЧ ШК с амплитудами (a нбч ук)0 и (a нбч шк)0, соответственно. Сигналы БЧ УК и БЧ ШК на центральный излучающий элемент не поступают,
(bбч ук)0=(bбч шк)n=0.
Поступившие на вход АР упомянутые сигналы излучаются в окружающее пространство, формируя диаграммы направленности для сигналов НБЧ УК, БЧ УК, НБЧ ШК, БЧ ШК. АР формирует для сигналов НБЧ УК узкую ДН суммарного вида (колоколообразного вида) с максимумом, ориентированным в направлении оси ВПП. АР формирует для сигналов БЧ УК узкую ДН разностного вида (вида двойного колокола) с нулевым уровнем, ориентированным в направлении оси ВПП. АР формирует для сигналов НБЧ ШК широкую ДН суммарного вида в виде пьедестала с углублением, минимум которого направлен вдоль оси ВПП. АР формирует для сигналов БЧ ШК широкую ДН разностного вида с нулевым уровнем, ориентированным в направлении оси ВПП.
Датчики, расположенные в окрестности излучающих элементов АР, извлекают из электромагнитного поля небольшую долю энергии сигналов НБЧ УК, БЧ УК, НБЧ ШК, БЧ ШК (на уровне -25 дБ). При этом нормированное амплитудно-фазовое распределение упомянутых сигналов на выходе датчиков повторяет нормированное амплитудно-фазовое распределение упомянутых сигналов на излучающих элементах АР. Сигналы с левых датчиков с номерами n≠0 поступают непосредственно на ЛСУ, сигналы с правых датчиков с номерами n≠0 поступают непосредственно на ПСУ. Сигналы с датчика с номером n=0 (90) делятся 3 дБ делителем мощности на два равных по амплитуде и с одинаковой фазой сигнала, которые поступают на выходы 211 и 212. С выхода 211 сигнал поступает на НО ЛСУ с номером n=0 (100лев). С выхода 212 сигнал поступает на НО ПСУ с номером n=0 (100пр).
ЛСУ и ПСУ суммируют сигналы со всех датчиков так, как суммируются в пространстве в дальней зоне на оси ВПП сигналы, излучаемые АР. Для решения этой задачи необходимо, во-первых, чтобы сигналы от всех датчиков имели бы одно и то же ослабление, и, во-вторых, все сигналы на выходе ЛСУ и на выходе ПСУ были бы синфазны. Равное ослабление сигналов в ЛСУ, равно как и в ПСУ, обеспечивается тем, что НО с разными номерами n имеют определенные по приведенной выше рекуррентной формуле коэффициенты передачи по напряжению Кn сигнала с n-го датчика на выход ЛСУ (ПСУ) (n=0, 1, …, N).
Длины фазирующих отрезков кабеля 11 определены из условия синфазного сложения сигналов от всех левых датчиков на выходе ЛСУ и от всех правых датчиков на выходе ПСУ. Электрическая длина от датчика 90 до входа НО 100лев (а также от датчика 90 до входа НО 100пр) должна быть равна электрической длине соединительных кабелей от датчиков до НО с номерами n≠0. Далее описание работы КРМ по второму варианту аналогично описанию работы КРМ по первому варианту с непринципиальным отличием, заключающимся в том, что суммирование в формулах начинается с n=0, при этом b0 ук=b0 шк=0.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХЧАСТОТНЫЙ КУРСОВОЙ РАДИОМАЯК (ВАРИАНТЫ) | 2014 |
|
RU2575010C1 |
| ДВУХЧАСТОТНЫЙ ГЛИССАДНЫЙ РАДИОМАЯК | 2016 |
|
RU2624263C1 |
| Способ и радиомаяк системы инструментальной посадки с функцией проверки и калибровки бортовых приемников воздушных судов (варианты) | 2023 |
|
RU2816376C1 |
| СПОСОБ РЕГУЛИРОВКИ ИНФОРМАЦИОННОГО ПАРАМЕТРА КУРСО-ГЛИССАДНЫХ РАДИОМАЯКОВ И УСТРОЙСТВА ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2017 |
|
RU2695316C2 |
| Глиссадный радиомаяк | 2023 |
|
RU2818668C1 |
| ГЛИССАДНЫЙ РАДИОМАЯК ДЛЯ ЗАХОДА НА ПОСАДКУ ПО КРУТОЙ ТРАЕКТОРИИ (ВАРИАНТЫ) | 2016 |
|
RU2619071C1 |
| СИСТЕМА И СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2468964C1 |
| СПОСОБ ФОРМИРОВАНИЯ, ИЗМЕРЕНИЯ ПАРАМЕТРОВ И ОБРАБОТКИ СИГНАЛОВ СИГНАЛА ДЛЯ ДВУХЧАСТОТНОЙ КУРСО-ГЛИССАДНОЙ СИСТЕМЫ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2476989C1 |
| Способ и устройство контроля за положением глиссады и координатами самолёта в дальней зоне | 2018 |
|
RU2692079C1 |
| Способ и устройство контроля за отклонением снижающегося самолета от оси взлетно-посадочной полосы | 2019 |
|
RU2725891C1 |
Двухчастотный курсовой радиомаяк (КРМ) предназначен для обеспечения инструментального захода на посадку и посадки самолетов. Достигаемый технический результат - сокращение количества элементов фидерного тракта апертурного контроля КРМ за счет последовательного сложения сигналов от датчиков, а также более простая настройка устройства апертурного контроля. Указанный результат достигается за счет того, что двухчастотный курсовой радиомаяк содержит устройства сигналов узкого канала (УК) и широкого канала (ШК), линейную антенную решетку (АР) 2N излучающих элементов (ИЭ) в первом варианте или 2N+1 ИЭ во втором варианте КРМ. ИЭ расположены симметрично относительно центра АР, при этом все элементы и устройства, входящие в состав первого и второго вариантов двухчастотного курсового радиомаяка, выполнены и соединены между собой определенным образом. 2 н.п. ф-лы, 2 ил., 2 табл.
1. Двухчастотный курсовой радиомаяк (КРМ) для обеспечения инструментального захода на посадку и посадки самолетов, содержащий первое устройство формирования сигнала "несущая плюс боковые частоты" узкого канала (НБЧ УК) (далее, первое устройство), второе устройство формирования сигнала "боковые частоты" узкого канала (БЧ УК) (далее, второе устройство), третье устройство формирования сигнала "несущая плюс боковые частоты" широкого канала (НБЧ ШК) (далее, третье устройство), четвертое устройство формирования сигнала "боковые частоты" широкого канала (БЧ ШК) (далее, четвертое устройство), линейную антенную решетку (АР) 2N (где N - целое число, большее или равное двум) излучающих элементов (ИЭ), из расположенных симметрично относительно центра АР N левых (1лев, 2лев, …, Nлев) и N правых (1пр, 2пр, …, Nпр) излучающих элементов, причем счет левых и правых ИЭ выполняется от центра АР к левому и правому ее краю, соответственно, распределительное устройство (РУ) с четырьмя входами и 2N выходами, N левых и N правых датчиков с кабелями снижения, при этом датчики расположены вблизи излучающих элементов АР, причем датчик имеет тот же номер, что и номер излучающего элемента АР, устройство измерения информационного параметра - разности глубин модуляции (РГМ) с тремя входами, дополнительно содержит направленный ответвитель (НО) сигналов узкого канала (НО УК), направленный ответвитель сигналов широкого канала (НО ШК), N-1 левых направленных ответвителей (НО) на связанных линиях, N-1 правых НО на связанных линиях, 2N-4 фазирующих отрезков кабеля, делитель мощности с первым и вторым выходами, фиксированный фазовращатель на 90°, мост, первый сумматор с первым и вторым входами, второй сумматор с первым и вторым входами; при этом выход первого устройства последовательно соединен с НО УК и первым входом РУ, второе устройство соединено со вторым входом РУ, третье устройство последовательно соединено с НО ШК и третьим входом РУ, четвертое устройство соединено с четвертым входом РУ, выходы РУ соединены с излучающими элементами АР; левые НО с помощью фазирующих отрезков кабеля последовательно соединены друг с другом с образованием левого суммирующего устройства (ЛСУ), входом которого служит вход НО с номером (N-1)лев, а выходом служит выход НО с номером 1л; правые НО с помощью фазирующих отрезков кабеля последовательно соединены друг с другом с образованием правого суммирующего устройства (ПСУ), входом которого служит вход НО с номером (N-1)пр, а выходом служит выход НО с номером 1пр; датчик Nлев соединен со входом ЛСУ, датчик (N-1)лев и последующие датчики соединены с развязанными плечами НО с совпадающими номерами; выход ЛСУ последовательно соединен с фиксированным фазовращателем и первым входом моста; правый датчик Nпр соединен со входом ПСУ, правый датчик (N-1)пр и последующие правые датчики соединены с развязанными выходами НО с совпадающими номерами; выход ПСУ соединен со вторым входом моста, первый выход которого соединен с первым входом устройства измерения РГМ, а второй выход моста соединен с делителем мощности, первый выход которого соединен последовательно с первым входом первого сумматора и вторым входом устройства измерения РГМ, а второй выход соединен последовательно с первым входом второго сумматора и третьим входом устройства измерения РГМ; выход связанной линии НО УК соединен со вторым входом первого сумматора, выход связанной линии НО ШК соединен со вторым входом второго сумматора, согласованные нагрузки соединены с плечами НО, в которые поступает связанная мощность; длины фазирующих отрезков кабеля выбираны из условия синфазного сложения сигналов от всех левых датчиков на выходе ЛСУ и от всех правых датчиков на выходе ПСУ.
2. Двухчастотный КРМ для обеспечения инструментального захода на посадку и посадки самолетов, содержащий первое устройство формирования сигнала НБЧ УК (далее, первое устройство), второе устройство формирования сигнала БЧ УК (далее, второе устройство), третье устройство формирования сигнала НБЧ ШК (далее, третье устройство), четвертое устройство формирования сигнала БЧ ШК (далее, четвертое устройство), линейную антенную решетку (АР) 2N+1, где N - целое число, большее или равное двум, излучающих элементов, из расположенных симметрично относительно центра АР N левых (1лев, 2лев, …, Nлев), N правых (1пр, 2пр, …, Nпр) излучающих элементов, причем счет левых и правых излучающих элементов выполняется от центра антенной решетки к левому и правому краю АР, соответственно, и расположенного в центре АР излучающего элемента с номером 0, кроме того, содержит первый делитель мощности с первым и вторым выходом, распределительное устройство (РУ) с четырьмя входами и 2N+1 выходами, N левых и N правых датчиков и датчик излучающего элемента с номером 0, при этом датчики расположены вблизи излучающих элементов АР, причем датчик имеет тот же номер, что и номер излучающего элемента АР, устройство измерения информационного параметра - разности глубин модуляции (РГМ) с тремя входами, дополнительно содержит направленный ответвитель (НО) сигналов узкого канала (НО УК), направленный ответвитель сигналов широкого канала (НО ШК), N левых направленных ответвителей на связанных линиях (НО), N правых НО на связанных линиях, 2N-2 фазирующих отрезков кабеля, первый делитель мощности с первым и вторым выходами, второй делитель мощности с первым и вторым выходами, фиксированный фазовращатель на 90°, мост, первый сумматор с первым и вторым входами, второй сумматор с первым и вторым входами; при этом выход первого устройства последовательно соединен с НО УК и первым входом РУ, второе устройство соединено со вторым входом РУ, третье устройство последовательно соединено с НО ШК и третьим входом РУ, четвертое устройство соединено с четвертым входом РУ, выходы РУ соединены с излучающими элементами АР; левые НО с помощью фазирующих отрезков кабеля последовательно соединены друг с другом с образованием левого суммирующего устройства (ЛСУ), входом которого служит вход НО с номером (N-1)лев, а выходом служит выход НО с номером 0лев; правые НО с помощью фазирующих отрезков кабеля последовательно соединены друг с другом с образованием правого суммирующего устройства (ПСУ), входом которого служит вход НО с номером (N-1)пр, а выходом служит выход НО с номером 0пр; датчик с номером 0 соединен с первым делителем мощности, первый выход которого соединен развязанным выходом НО с номером 0лев, а второй выход соединен с развязанным выходом НО с номером 0пр; датчик Nлев соединен со входом ЛСУ, датчики с номерами с (N-1)лев по 1лев соединены с развязанными плечами НО с совпадающими номерами; выход ЛСУ последовательно с фиксированным фазовращателем и с первым входом моста, датчик Nпр соединен со входом ПСУ, правые датчики с номерами с (N-1)пр по 1пр соединены с развязанными выходами НО с совпадающими номерами; выход ПСУ соединен вторым входом моста, первый выход которого соединен с первым входом устройства измерения РГМ, а второй выход моста соединен с делителем мощности, первый выход которого соединен последовательно с первым входом первого сумматора и вторым входом устройства измерения РГМ, а второй выход соединен последовательно с первым входом второго сумматора и третьим входом устройства измерения РГМ; выход связанной линии НО УК соединен со вторым входом первого сумматора, выход связанной линии НО ШК соединен со вторым входом второго сумматора, согласованные нагрузки соединены с плечами НО, в которые поступает связанная мощность; длины фазирующих отрезков кабеля выбраны из условия синфазного сложения сигналов от всех левых датчиков на выходе ЛСУ и от всех правых датчиков на выходе ПСУ.
| СПОСОБ ФОРМИРОВАНИЯ, ИЗМЕРЕНИЯ ПАРАМЕТРОВ И ОБРАБОТКИ СИГНАЛОВ СИГНАЛА ДЛЯ ДВУХЧАСТОТНОЙ КУРСО-ГЛИССАДНОЙ СИСТЕМЫ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2476989C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПОВОРАЧИВАНИЯ ОВАЛЬНЫХ ПАПИРОС ШВОМ ВНИЗ | 1929 |
|
SU39014A1 |
| SU 1641095 A2, 20.05.1996 | |||
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| JP 9211120 A, 15.08.1997 | |||
| US 20120299776 A1, 29.11.2012 | |||
| JP 10288655 A, 27.10.1998 | |||
| US 4151529 A, 24.04.1979 | |||

