Изобретение относится к твердотельным волновым гироскопам, работающим в режиме датчика углового положения. Твердотельный волновой гироскоп (ТВГ) измеряет угол поворота. Выходной сигнал ТВГ содержит систематическую погрешность - дрейф. Дрейф - собственная скорость прецессии волны в резонаторе ТВГ. Дрейф зависит от углового положения волновой картины в резонаторе, от температуры резонатора, от температурного градиента в резонаторе. Температура резонатора характеризуется его частотой. Температурный градиент характеризуется изменением частоты резонатора. Для компенсации дрейфа в выходном сигнале ТВГ используется система компенсации дрейфа.
Известны способы моделирования дрейфа твердотельного волнового гироскопа для их последующей компенсации в работающем приборе.
Способ компенсации погрешностей в показаниях твердотельного волнового гироскопа (см. книгу Н.Е. Егармин «Погрешности волнового твердотельного гироскопа», Москва, Институт проблем механики АН СССР, препринт №391,1989 г., 23 с.):
где θ' - эволюция волновой картины колебаний резонатора волнового твердотельного гироскопа при неподвижном основании, kn,i, θn,i - параметры, зависящие от времени и отражающие специфику того или иного механизма дрейфа, n - натуральное число. В данном способе модель дрейфа учитывает в явном виде зависимость от углового положения волны, другие факторы дрейфа не уточняются.
Известен способ алгоритмической компенсации температурной скорости дрейфа твердотельного волнового гироскопа (патент РФ №2480713, опубл. 27.04.2013). В данном способе компенсации модель дрейфа представляется:

где υ - угол волны резонатора;
Θр - температура резонатора;
ω01 - постоянная составляющая дрейфа в первом цикле измерений;
ωm - амплитуда переменной составляющей дрейфа;
ϕ1 - начальный фазовый угол переменной составляющей дрейфа;
k - номер гармоники;
δω0=ω08-ω01 - разность постоянных составляющих дрейфа в восьмом и первом циклах измерений;
δω(υ)=δωm sink(υ+ϕ2);
δωm - амплитуда зависимости конечного температурного изменения переменной составляющей дрейфа от угла волны резонатора;
ϕ2 - начальный фазовый угол зависимости температурного изменения переменной составляющей дрейфа от угла волны резонатора;
 - текущее значение частоты резонатора;
- текущее значение частоты резонатора;
 - частота резонатора в первом цикле измерений на угле волны резонатора минус 90°;
- частота резонатора в первом цикле измерений на угле волны резонатора минус 90°;
 - установившаяся частота резонатора в восьмом цикле измерений на угле волны резонатора минус 90°.
- установившаяся частота резонатора в восьмом цикле измерений на угле волны резонатора минус 90°.
Недостатками известной модели являются использование только одной гармоники зависимости дрейфа от углового положения волны; представление зависимости дрейфа от частоты в виде линейной функции; не учитывается зависимость дрейфа от скорости изменения температуры.
Задачей заявляемого изобретения является повышение точности компенсации дрейфа ТВГ.
Указанный технический результат достигается тем, что способ компенсации дрейфа ТВГ включает предварительное определение математических параметров модели температурной скорости дрейфа твердотельного волнового гироскопа, определение углового положения волны резонатора в рабочем режиме и алгоритмическую компенсацию его температурной скорости дрейфа в соответствии с этой моделью, рассчитывают значения производной частоты резонатора, при этом модель дрейфа использует значения углового положения волны, частоту резонатора и производную частоты и рассчитывается в виде функции


где Ak, Bk - полиномы степени N по члену f и степени M по члену g;
θ - значение углового положения волны;
 - резонансная частота твердотельного волнового гироскопа;
- резонансная частота твердотельного волнового гироскопа;
g - значение производной резонансной частоты;
N - максимальная степень в функциональной зависимости величины дрейфа от частоты;
M - максимальная степень в функциональной зависимости величины дрейфа от производной частоты;
K - количество гармоник в функциональной зависимости дрейфа от угла,
параметры ak,i,j, bk,i,j находят для конкретного прибора путем проведения съемов значений электрического угла θ, скорости изменения электрического угла, резонансной частоты  производной резонансной частоты g для различных температур и скоростей изменения температур на неподвижном основании.
производной резонансной частоты g для различных температур и скоростей изменения температур на неподвижном основании.
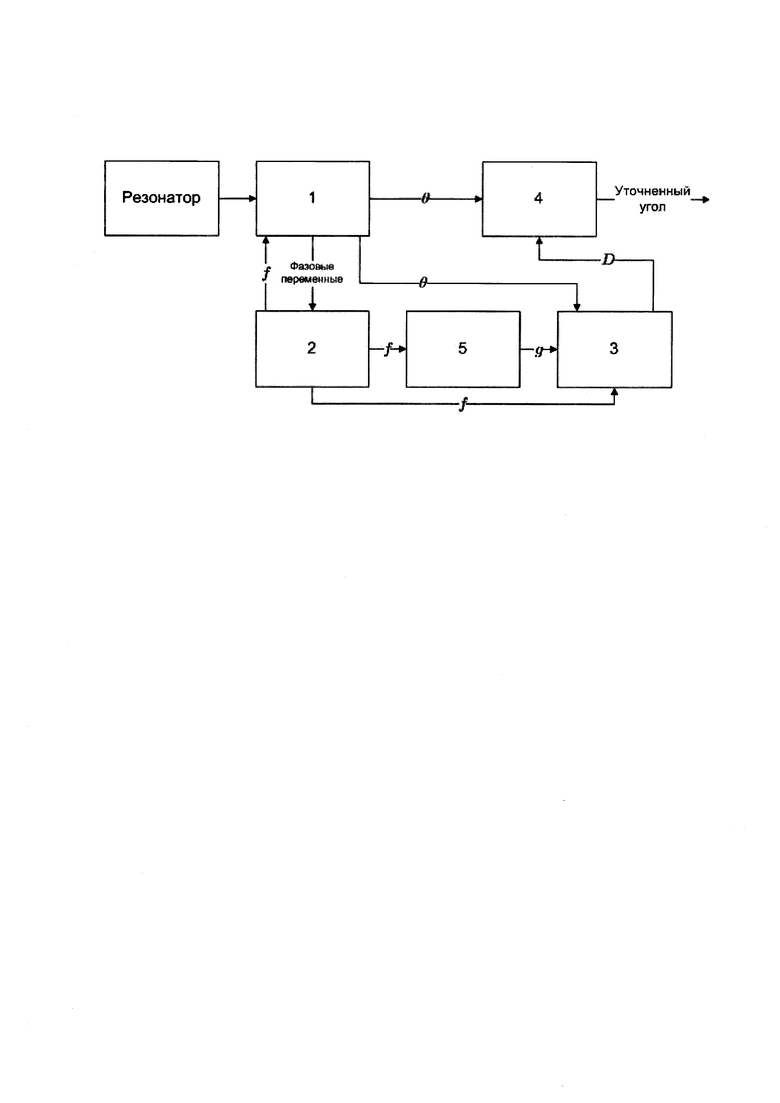
Система компенсации дрейфа ТВГ содержит резонатор, соединенный с блоком обработки сигналов, формирующий значение углового положения волны в резонаторе, блок фазовой подстройки частоты резонатора, формирующий значение частоты резонатора, соединенный с блоком обработки сигналов. Выход блока фазовой подстройки частоты резонатора соединен с цифровым дифференцирующим фильтром и блоком расчета значения дрейфа, выход цифрового дифференцирующего фильтра соединен с блоком расчета значения дрейфа, выход которого соединен с блоком компенсации дрейфа, который также соединен с блоком обработки сигналов.
Изобретение поясняется структурной схемой.
Система компенсации дрейфа ТВГ содержит резонатор, блок обработки сигналов ТВГ 1, соединенный с блоком фазовой подстройки частоты 2 резонатора ТВГ, блоком 3 расчета значения дрейфа D и блоком компенсации дрейфа 4. Блок расчета значения дрейфа 3 соединен с блоком фазовой подстройки частоты 2 через цифровой дифференцирующий фильтр 5. Выход блока 3 соединен с блоком компенсации дрейфа 4.
Блок фазовой подстройки частоты 2 резонатора ТВГ определяет текущее значение частоты резонатора  . Цифровой дифференцирующий фильтр 5 рассчитывает производную g частоты резонатора ТВГ. Блок обработки сигналов 1 формирует текущее значение углового положения волны θ. Блок 3 рассчитывает значения дрейфа D по значениям текущего углового положения волны θ, текущей частоты
. Цифровой дифференцирующий фильтр 5 рассчитывает производную g частоты резонатора ТВГ. Блок обработки сигналов 1 формирует текущее значение углового положения волны θ. Блок 3 рассчитывает значения дрейфа D по значениям текущего углового положения волны θ, текущей частоты  текущему значению производной частоты g и хранящихся в памяти параметров модели дрейфа ТВГ для данного изделия.
текущему значению производной частоты g и хранящихся в памяти параметров модели дрейфа ТВГ для данного изделия.
Блок компенсации дрейфа 4 выходного сигнала ТВГ формирует уточненное значение углового положения волны.
Способ компенсации дрейфа реализуют следующим образом.
ТВГ может работать в широком диапазоне температур. Точность прибора определяется дрейфом волны в резонаторе. В установившемся тепловом режиме дрейф ТВГ будет описываться суммой гармонических функций. При изменении температуры резонатора амплитуды гармонических функций в представлении дрейфа будут меняться, при этом зависимость может иметь нелинейный закон.
В частности дрейф ТВГ зависит от добротности резонатора, которая в свою очередь имеет нелинейную зависимость от температуры. Частота резонатора монотонно и почти линейно зависит от температуры. Поэтому модель дрейфа эффективнее представлять через зависимости от резонансной частоты, так как частоту можно получить из блока фазовой автоподстройки частоты, а для получения температуры потребуется дополнительный датчик.
Также амплитуды гармонических функций в представлении дрейфа проявляют зависимость от скорости изменения температуры. В частности, это связано с тем, что дрейф зависит от сил реакции в месте крепления резонатора, которые меняются с изменением температуры. Температура в месте крепления резонатора и в самом резонаторе будет отличаться тем сильнее, чем больше температурный градиент. Для получения большей точности компенсации дрейфа в модели необходимо учесть температурный градиент. Температурный градиент пропорционален скорости изменения частоты резонатора.
Резонансная частота  характеризует температурные изменения в резонаторе. Производная резонансной частоты g характеризует температурный градиент в резонаторе. Текущие значение θ,
характеризует температурные изменения в резонаторе. Производная резонансной частоты g характеризует температурный градиент в резонаторе. Текущие значение θ,  g подаются в блок расчета 3 значения дрейфа волны, использующего модель дрейфа в виде функции трех переменных. Значение дрейфа используется в блоке 4 компенсации дрейфа, на выходе которого появляется уточненное значение измеренного угла поворота.
g подаются в блок расчета 3 значения дрейфа волны, использующего модель дрейфа в виде функции трех переменных. Значение дрейфа используется в блоке 4 компенсации дрейфа, на выходе которого появляется уточненное значение измеренного угла поворота.
Модель дрейфа D представляет собой функцию

где Ak, Bk - полиномы степени N по члену  и степени M по члену g;
и степени M по члену g;
θ - угол, выходное значение блока обработки сигналов;
 - резонансная частота ТВГ;
- резонансная частота ТВГ;
g - значение производной резонансной частоты ТВГ;
N - максимальная степень в функциональной зависимости дрейфа от частоты;
M - максимальная степень в функциональной зависимости дрейфа от производной частоты;
K - количество гармоник в функциональной зависимости дрейфа от угла;
N, M, K - выбираются исходя из необходимой точности компенсации и ограничений на количество коэффициентов для хранения в памяти.
Параметры aij, bij - находятся для конкретного прибора путем проведения съемов значений электрического угла θ, скорости изменения электрического угла θ', частоты  скорости изменения частоты g для различных температур и скоростей изменения температур на неподвижном основании. В зависимости от диапазона рабочих температур и требований на температурные градиенты выбирается план проведения съемов и степень многочлена. По полученным данным методом наименьших квадратов вычисляются параметры модели aij, bij.
скорости изменения частоты g для различных температур и скоростей изменения температур на неподвижном основании. В зависимости от диапазона рабочих температур и требований на температурные градиенты выбирается план проведения съемов и степень многочлена. По полученным данным методом наименьших квадратов вычисляются параметры модели aij, bij.
Изобретение обеспечивает повышение точности компенсации дрейфа и соответственно точность выходного сигнала ТВГ в условиях быстрого изменения температуры внешней среды.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АЛГОРИТМИЧЕСКОЙ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ СКОРОСТИ ДРЕЙФА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2011 |
|
RU2480713C1 |
| Способ контроля физических параметров резонатора твердотельного волнового гироскопа | 2021 |
|
RU2783189C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА (ВАРИАНТЫ) | 2012 |
|
RU2521783C2 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2013 |
|
RU2541711C1 |
| ТВЕРДОТЕЛЬНЫЙ ЛАЗЕРНЫЙ ГИРОСКОП | 2009 |
|
RU2421689C1 |
| ТРЕХОСНЫЙ ГИРОСКОПИЧЕСКИЙ БЛОК | 2007 |
|
RU2344287C2 |
| МАЛОГАБАРИТНЫЙ ТВЕРДОТЕЛЫЙ ВОЛНОВОЙ ГИРОСКОП | 2007 |
|
RU2362121C2 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ В ЧУВСТВИТЕЛЬНОМ ЭЛЕМЕНТЕ ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518632C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАСШТАБНОГО КОЭФФИЦИЕНТА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА НА ПОВОРОТНОМ СТОЛЕ | 2012 |
|
RU2579768C2 |
| Способ измерения угловой скорости с помощью волнового твердотельного гироскопа | 2020 |
|
RU2738824C1 |
Изобретение относится к твердотельным волновым гироскопам (ТВГ), работающим в режиме датчика углового положения. Способ компенсации дрейфа ТВГ включает предварительное определение математических параметров модели температурной скорости дрейфа ТВГ, определение углового положения волны резонатора в рабочем режиме и алгоритмическую компенсацию его температурной скорости дрейфа в соответствии с этой моделью, рассчитывают значения производной частоты резонатора, при этом модель дрейфа использует значения углового положения волны, частоту резонатора и производную частоты и рассчитывается в виде функции


где Ak, Bk - полиномы степени N по члену f и степени M по члену g; θ - значение углового положения волны;  - резонансная частота твердотельного волнового гироскопа; g - значение производной резонансной частоты; N - максимальная степень в функциональной зависимости величины дрейфа от частоты; M - максимальная степень в функциональной зависимости величины дрейфа от производной частоты; K - количество гармоник в функциональной зависимости дрейфа от угла; параметры ak,i,j, bk,i,j находят для конкретного прибора путем проведения съемов значений электрического угла θ, скорости изменения электрического угла, резонансной частоты
- резонансная частота твердотельного волнового гироскопа; g - значение производной резонансной частоты; N - максимальная степень в функциональной зависимости величины дрейфа от частоты; M - максимальная степень в функциональной зависимости величины дрейфа от производной частоты; K - количество гармоник в функциональной зависимости дрейфа от угла; параметры ak,i,j, bk,i,j находят для конкретного прибора путем проведения съемов значений электрического угла θ, скорости изменения электрического угла, резонансной частоты  производной резонансной частоты g для различных температур и скоростей изменения температур на неподвижном основании. Технический результат – повышение точности компенсации дрейфа ТВГ. 2 н.п. ф-лы, 1 ил.
производной резонансной частоты g для различных температур и скоростей изменения температур на неподвижном основании. Технический результат – повышение точности компенсации дрейфа ТВГ. 2 н.п. ф-лы, 1 ил.
1. Способ компенсации дрейфа твердотельного волнового гироскопа, включающий предварительное определение математических параметров модели температурной скорости дрейфа твердотельного волнового гироскопа, определение углового положения волны резонатора в рабочем режиме и алгоритмическую компенсацию его температурной скорости дрейфа в соответствии с этой моделью, отличающийся тем, что определяют значения производной резонансной частоты, а модель дрейфа D рассчитывают по формуле


где Ak, Вk - полиномы степени N по члену f и степени М по члену g;
θ - значение углового положения волны;
 - резонансная частота твердотельного волнового гироскопа; g - значение производной резонансной частоты;
- резонансная частота твердотельного волнового гироскопа; g - значение производной резонансной частоты;
N - максимальная степень в функциональной зависимости величины дрейфа от частоты;
М - максимальная степень в функциональной зависимости величины дрейфа от производной частоты;
K - количество гармоник в функциональной зависимости дрейфа от угла,
параметры аk,i,j, bk,j,j находят для конкретного прибора путем проведения съемов значений электрического угла θ, скорости изменения электрического угла, резонансной частоты , производной резонансной частоты g для различных температур и скоростей изменения температур на неподвижном основании.
2. Система компенсации дрейфа твердотельного волнового гироскопа содержит резонатор, соединенный с блоком обработки сигналов, формирующим значение углового положения волны в резонаторе, блок фазовой подстройки частоты резонатора, формирующий значение частоты резонатора, соединенный с блоком обработки сигналов, отличающаяся тем, что выход блока фазовой подстройки частоты резонатора соединен с цифровым дифференцирующим фильтром и блоком расчета значения дрейфа, выход цифрового дифференцирующего фильтра соединен с блоком расчета значения дрейфа, выход которого соединен с блоком компенсации дрейфа, который также соединен с блоком обработки сигналов.
| СПОСОБ АЛГОРИТМИЧЕСКОЙ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ СКОРОСТИ ДРЕЙФА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2011 |
|
RU2480713C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ЗАПАДНОГО ДРЕЙФА ТВЕРДОГО ЯДРА ПЛАНЕТЫ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2251662C2 |
| US 6289733 B1, 18.09.2001 | |||
| US 6647352 B1, 11.11.2003. | |||

