Изобретение относится к области приборостроения и может быть использовано для повышения точности измерения угловой скорости с помощью волнового твердотельного гироскопа в составе инерциальных систем ориентации и навигации.
Известен способ измерения угловой скорости с помощью волнового твердотельного гироскопа, работающего в режиме интегрирующего гироскопа. При работе твердотельного волнового гироскопа в этом режиме его упругая волна изменяет свое угловое положение в резонаторе, что обуславливает существенные погрешности, связанные с угловой зависимостью физических характеристик резонатора гироскопа.
Известен способ измерения угловой скорости с помощью волнового твердотельного гироскопа, который работает в режиме датчика угловой скорости (см., например, книгу В.А. Матвеева, В.И. Липатникова, А.В. Алехина «Проектирование волнового твердотельного гироскопа», М., 1998, стр. 5). В этом режиме упругая волна в резонаторе гироскопа находится на одном угле, что обеспечивается системой обратной связи по действующим на резонатор управляющим силам со стороны системы датчиков сил гироскопа. В этом режиме отсутствуют погрешности, связанные с угловой зависимостью физических характеристик резонатора гироскопа.
Однако твердотельный волновой гироскоп, работающий в режиме датчика угловой скорости, не может измерять угловые скорости высокоманевренных объектов, имеющих величины угловых скоростей порядка 400°/с, так как система обратной связи современного гироскопа, управляющая прецессией упругой волны, не может отработать угловые скорости более 10°/с из-за невозможности создавать необходимые воздействующие на упругую волну силы с помощью применяемых электростатических датчиков силы. Действующие на упругую волну резонатора силы, управляющие ее прецессией, также изменяют характеристики упругой волны, что вызывает дополнительные погрешности гироскопа даже при отработке не больших угловых скоростей.
В известном способе работа твердотельного волнового гироскопа в режиме датчика угловой скорости всегда происходит в нулевом угловом положении упругой волны относительно резонатора и корпуса гироскопа. Это нулевое положение физически характеризуется расположением элементов электростатической системы датчика угла положения упругой волны. Электростатическая система элементов датчиков силы твердотельного волнового гироскопа конструктивно согласована с системой датчика угла. При запуске гироскопа она создает упругую волну в ее нулевом положении относительно резонатора и корпуса гироскопа и в рабочем режиме система обратной связи в режиме датчика угловой скорости удерживает упругую волну в этом положении. При сборке твердотельного волнового гироскопа резонатор относительно корпусной части в угловом положении устанавливается произвольно.
Известно, что из-за физической неоднородности по окружному углу полусферического резонатора возникает гармоническая составляющая переменной скорости дрейфа гироскопа при угловом перемещении упругой волны, которая имеет свои минимумы и максимумы в критических зонах, но угол в резонаторе, на котором переменная составляющая скорости дрейфа минимизируется, для несобранного окончательно гироскопа не известен. Это угловое положение в резонаторе можно определить только по точностным испытаниям окончательно собранного гироскопа. Установка резонатора в корпусе не предусматривает этой особенности и происходит произвольным образом. Поэтому при работе в режиме датчика угловой скорости в нулевом положении, упругая волна может находиться в неблагоприятной зоне резонатора, что обуславливает повышенные значения различного вида погрешности гироскопа.
Таким образом, применение известного способа работы твердотельного волнового гироскопа в режиме датчика угловой скорости не обеспечивает его работоспособность при больших угловых скоростях высокоманевренного объекта, а также обуславливает погрешности гироскопа в условиях малых значений угловых скоростей от действия сил обратной связи и возможные погрешности, вызванные рабочим угловым расположением упругой волны в резонаторе в критической зоне.
Техническим результатом, который может быть получен при осуществлении настоящего изобретения, является повышение точности измерения угловой скорости с помощью твердотельного волнового гироскопа.
Технический результат достигается тем, что в известном способе работы твердотельного волнового гироскопа, включающем первоначально запуск гироскопа с образованием в его полусферическом резонаторе упругой волны с требуемыми параметрами в ее нулевом угловом положении, измеряемого системой выработки ее углового положения в резонаторе, последующим рабочим режимом, в котором упругая волна всегда находится на одном угле относительно резонатора, дополнительно предварительно твердотельный волновой гироскоп стабилизируют в инерциальном пространстве по углу поворота его корпуса вокруг оси чувствительности, для чего его располагают на платформе одноосного гиростабилизатора в качестве гиродатчика осью чувствительности параллельно оси гиростабилизатора, на которой устанавливают датчик угловой скорости корпуса гиростабилизатора относительно платформы, затем гиростабилизатор размещают на неподвижном относительно Земли основании, после этого включают гиростабилизатор с волновым твердотельным гироскопом и производят приведение упругой волны в заданные угловые положения в резонаторе, для чего на вход усилителя стабилизации подают сигналы уставки Uyi, устанавливая упругую волну сначала на угол -90°, а от него на углы  которые измеряют системой выработки углового положения упругой волны в резонаторе, а также на этих углах определяют угловые скорости основания ωi гиростабилизатора с помощью датчика угловой скорости, расположенного на оси стабилизированной платформы, на основе измеренных сигналов уставки, угловых положений упругой волны в резонаторе и соответствующих им угловых скоростей основания гиростабилизатора находят угловое положение упругой волны в резонаторе ϑo и соответствующий ему сигнал уставки Uyo, при которых переменная составляющая скорости дрейфа ωП твердотельного волнового гироскопа минимальна, затем в рабочем режиме располагают упругую волну в резонаторе на угле ϑo для чего на вход усилителя стабилизатора подают сигнал уставки Uyo и измеряют угловую скорость по оси чувствительности волнового твердотельного гироскопа, используя показания ω датчика угловой скорости, установленного на оси гиростабилизированной платформы.
которые измеряют системой выработки углового положения упругой волны в резонаторе, а также на этих углах определяют угловые скорости основания ωi гиростабилизатора с помощью датчика угловой скорости, расположенного на оси стабилизированной платформы, на основе измеренных сигналов уставки, угловых положений упругой волны в резонаторе и соответствующих им угловых скоростей основания гиростабилизатора находят угловое положение упругой волны в резонаторе ϑo и соответствующий ему сигнал уставки Uyo, при которых переменная составляющая скорости дрейфа ωП твердотельного волнового гироскопа минимальна, затем в рабочем режиме располагают упругую волну в резонаторе на угле ϑo для чего на вход усилителя стабилизатора подают сигнал уставки Uyo и измеряют угловую скорость по оси чувствительности волнового твердотельного гироскопа, используя показания ω датчика угловой скорости, установленного на оси гиростабилизированной платформы.
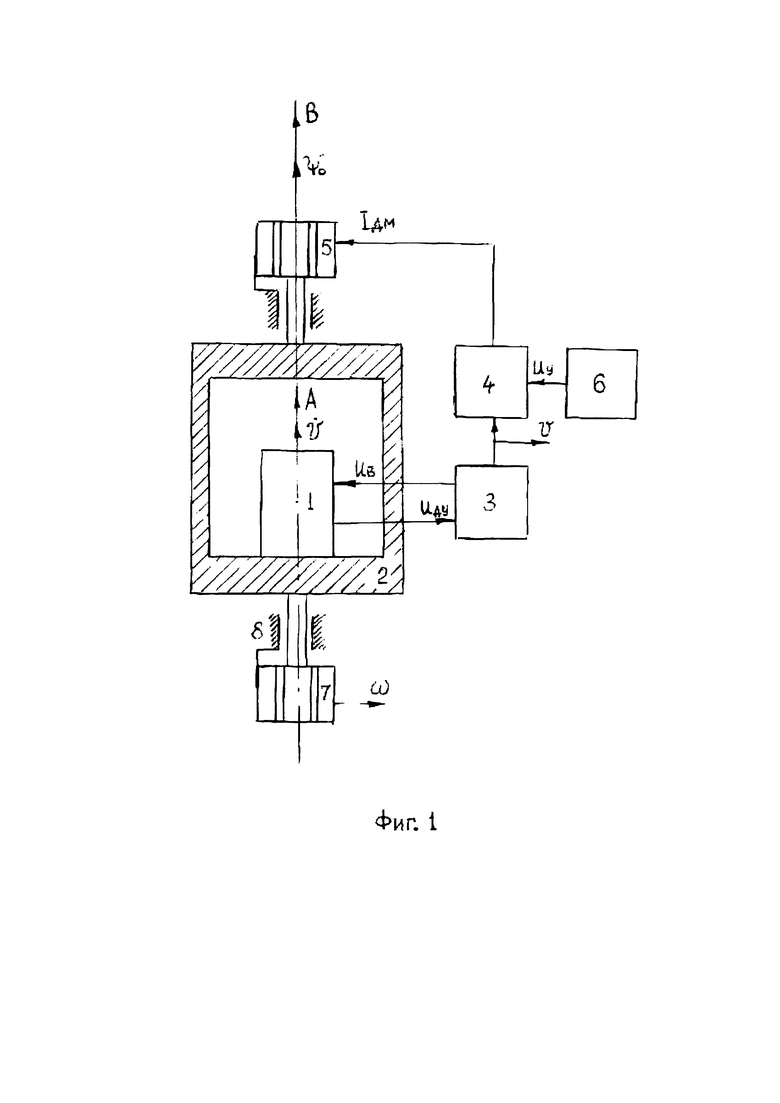
Блок-схема волнового твердотельного гироскопа в системе приведения упругой волны в резонаторе на заданный угол и стабилизации его корпуса в инерциальном пространстве по углу поворота вокруг оси чувствительности представлена на фиг. 1.
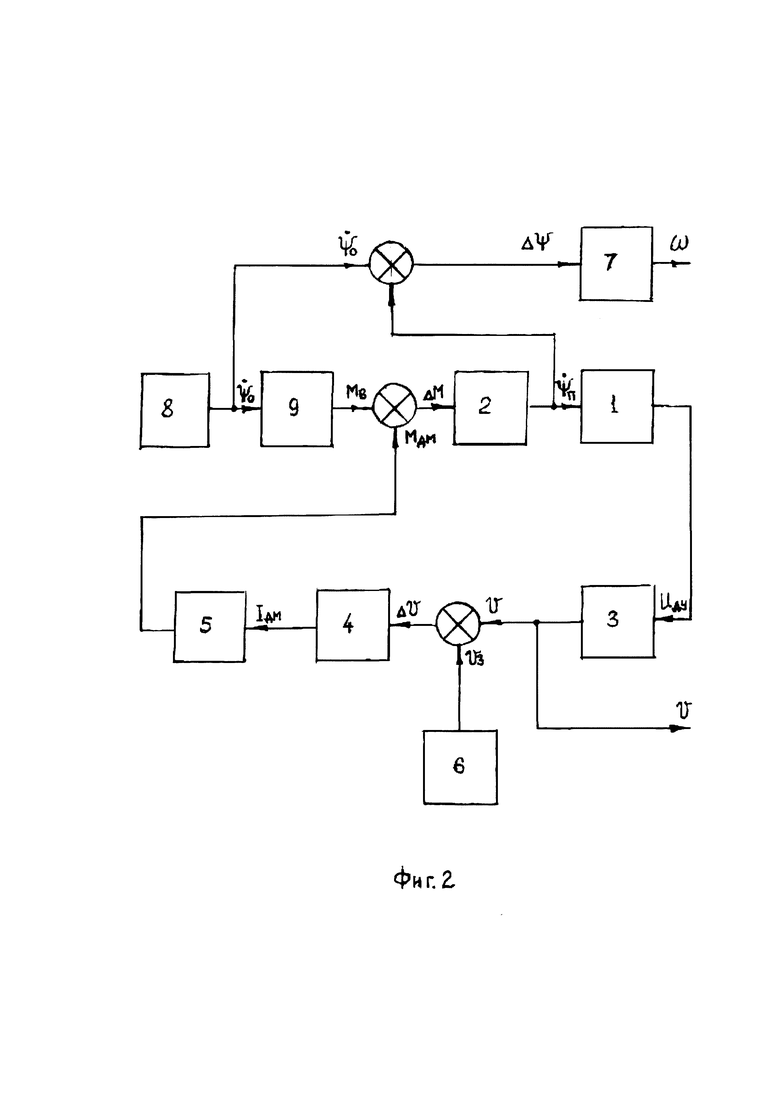
Функциональная схема стабилизации волнового твердотельного гироскопа в инерциальном пространстве по углу поворота его корпуса вокруг оси чувствительности, выработки показаний и приведения упругой волны на заданный угол в резонаторе представлена на фиг. 2.
Волновой твердотельный гироскоп 1 установлен на платформе 2 гиростабилизатора так, чтобы его ось чувствительности А была параллельна оси стабилизации платформы В. С системы датчиков углов волнового твердотельного гироскопа сигналы Uду поступают на блок электроники 3, который управляет параметрами упругой волны с помощью сформированных сигналов UB и вырабатывает сигнал ϑ углового положения упругой волны в резонаторе, который через усилитель стабилизации 4 подаются в виде тока Iдм на датчик момента стабилизации 5. Кроме системы стабилизации гиростабилизатор имеет систему приведения упругой волны в резонаторе гироскопа на заданный угол, которая включает датчик команд 6, вырабатывающий сигнал уставки Uy, соответствующий задаваемому углу ϑз положения упругой волны в резонаторе, поступающий на датчик момента стабилизации 5. На оси гиростабилизатора В также установлен датчик угловой скорости 7, измеряющий угловую скорость ω основания 8 гиростабилизатора относительно платформы 2, которая с точностью до приборной погрешности соответствует абсолютной угловой скорости  основания. Работа гиростабилизатора с волновым твердотельным гироскопом происходит следующим образом. Вначале платформа и волновой твердотельный гироскоп занимают требуемое исходное положение. При возникновении возмущающего момента МВ по оси В подвеса гиростабилизатора, обусловленного угловой скоростью
основания. Работа гиростабилизатора с волновым твердотельным гироскопом происходит следующим образом. Вначале платформа и волновой твердотельный гироскоп занимают требуемое исходное положение. При возникновении возмущающего момента МВ по оси В подвеса гиростабилизатора, обусловленного угловой скоростью  основания 8 гиростабилизатора, стабилизированная платформа с гироскопом начнет поворачиваться вокруг оси стабилизации В с ускорением
основания 8 гиростабилизатора, стабилизированная платформа с гироскопом начнет поворачиваться вокруг оси стабилизации В с ускорением  и возрастающей угловой скоростью
и возрастающей угловой скоростью  С датчиков углов гироскопа начнут сниматься сигналы Uду, которые после обработки в блоке электроники 3 будут сформированы в сигнал ϑ, характеризующий угол поворота упругой волны в резонаторе. Этот сигнал пропорционален угловому отклонению ψп, который после усиления в усилители стабилизации 4 в виде тока датчика момента Iдм поступит на датчик момента платформы 5, и последний приложит к оси стабилизации момент Мдм, противоположный внешнему моменту Мв. Ускорение
С датчиков углов гироскопа начнут сниматься сигналы Uду, которые после обработки в блоке электроники 3 будут сформированы в сигнал ϑ, характеризующий угол поворота упругой волны в резонаторе. Этот сигнал пропорционален угловому отклонению ψп, который после усиления в усилители стабилизации 4 в виде тока датчика момента Iдм поступит на датчик момента платформы 5, и последний приложит к оси стабилизации момент Мдм, противоположный внешнему моменту Мв. Ускорение  станет уменьшаться, но скорость
станет уменьшаться, но скорость  , угол
, угол  и стабилизирующий момент Мдм будут продолжать увеличиваться, пока момент Мдм не станет больше Мв и далее повторится аналогичное движение. При действии на платформу постоянного внешнего момента Мв устанавливаются колебания платформы относительно некоторого смещенного на величину
и стабилизирующий момент Мдм будут продолжать увеличиваться, пока момент Мдм не станет больше Мв и далее повторится аналогичное движение. При действии на платформу постоянного внешнего момента Мв устанавливаются колебания платформы относительно некоторого смещенного на величину  положения. Также установившееся колебание будет иметь упругая волна в резонаторе относительно угла
положения. Также установившееся колебание будет иметь упругая волна в резонаторе относительно угла  пропорционального
пропорционального  при котором среднее значение стабилизирующего момента
при котором среднее значение стабилизирующего момента  , где кс является коэффициентом передачи цепи стабилизации, уравновешивает внешний момент
, где кс является коэффициентом передачи цепи стабилизации, уравновешивает внешний момент  . Включением в цепь стабилизации специальных корректирующих устройств добиваются быстрого затухания колебаний, и платформа в установившемся режиме занимает устойчивое положение, отклоненное от исходного на угол
. Включением в цепь стабилизации специальных корректирующих устройств добиваются быстрого затухания колебаний, и платформа в установившемся режиме занимает устойчивое положение, отклоненное от исходного на угол  Отклонение
Отклонение  является статической погрешностью стабилизации. Таким образом, платформа с гироскопом застабилизирует свое положение в инерциальном пространстве относительно оси В, а корпус стабилизатора и объект, на котором он установлен, будут вращаться относительно платформы, и, следовательно, инерциального пространства с угловой скоростью
является статической погрешностью стабилизации. Таким образом, платформа с гироскопом застабилизирует свое положение в инерциальном пространстве относительно оси В, а корпус стабилизатора и объект, на котором он установлен, будут вращаться относительно платформы, и, следовательно, инерциального пространства с угловой скоростью  , которую измерит датчик угловой скорости 7 в виде приборной скорости ω.
, которую измерит датчик угловой скорости 7 в виде приборной скорости ω.
Так как в процессе стабилизации волновой твердотельный гироскоп не оказывает никакого силового воздействия на платформу, то гиростабилизатор с волновым твердотельным гироскопом является чисто индикаторным. При наличии собственных погрешностей в волновом твердотельном гироскопе происходит уход его упругой волны в инерциальном пространстве с угловой скоростью  При этом в системе выработки показаний гироскопа возникнет рассогласование
При этом в системе выработки показаний гироскопа возникнет рассогласование  , который воспринимается системой как отклонение платформы от требуемого положения и ликвидируется. В результате того, что скорость дрейфа
, который воспринимается системой как отклонение платформы от требуемого положения и ликвидируется. В результате того, что скорость дрейфа  гироскопа мала, а быстродействие системы стабилизации велико, в установившемся режиме платформа будет следить с погрешностью
гироскопа мала, а быстродействие системы стабилизации велико, в установившемся режиме платформа будет следить с погрешностью  за уходящим, вследствие скорости дрейфа, положением упругой волны, то есть поворачиваться в инерциальном пространстве со скоростью дрейфа
за уходящим, вследствие скорости дрейфа, положением упругой волны, то есть поворачиваться в инерциальном пространстве со скоростью дрейфа  что будет вносить погрешность
что будет вносить погрешность  в приборные показания ω, снимаемые с датчика угловой скорости 7.
в приборные показания ω, снимаемые с датчика угловой скорости 7.
Система приведения упругой волны на заданный угол в резонаторе решает две задачи: приведение упругой волны в резонаторе на заданное угловое положение и удержание упругой волны в этом положении в течение рабочего режима; придание сигналу Δϑ, поступающему на вход усилителя стабилизации в «приведенном» положении упругой волны, нулевого (или близкого к нулевому) значения. Чувствительными элементами системы приведения являются системы датчика угла твердотельного волнового гироскопа 1 и системы 3 выработки углового положения упругой волны в резонаторе. Нулевое положение ϑ=0 упругой волны связано с осями датчиков угла гироскопа и характеризуется нулевым значением синфазного сигнала, снимаемого с «синусной оси».
При необходимости приведения упругой волны в резонаторе на требуемый угол с помощью датчика команд 6 системы приведения, вырабатывается соответствующий сигнал ϑз. Этот сигнал алгебраически складывается с текущим значением угла положения упругой волны ϑ, вырабатываемого системой 3. Получившаяся разность Δϑ=ϑ-ϑз. поступает на вход усилителя 4 системы стабилизации. Усилитель 4 вырабатывает ток Iдм, пропорциональный Δϑ, который поступает в датчик момента 5 стабилизированной платформы. Равновесное состояние платформы нарушается, так как Мдм>Мв и платформа начинает совершать угловое движение вокруг своей оси подвеса В. При этом фазировка сигналов, управляющих движением платформы, такова, что направление ее поворота заставляет изменять угловое положение упругой волны в резонаторе таким образом, чтобы приращение Δϑп угла положения упругой волны, выработанное системой 3, компенсировано заданное значение ϑз.
Таким образом, достигается состояние, когда Δϑ=(ϑo+Δϑп), где ϑo - нулевое или исходное угловое положение упругой волны, но при этом упругая волна повернуты на заданный угол ϑз=Δϑп и сигнал Δϑп имеет такую величину, чтобы обеспечить Мв=Мдм и угловую стабилизацию платформы в инерциальном пространстве вокруг оси В и соответственно упругой волны в резонаторе на угле ϑз.
При работе волнового твердотельного гироскопа в составе одноосного гиростабилизатора (см. фиг. 1), установленного на высокоманевренном объекте, возможно измерение его предельной угловой скорости по оси чувствительности гироскопа, например, при ее величине 400°/с. В этом случае отработку угловой скорости выполняет контур стабилизации гироплатформы с использованием сигнала с волнового твердотельного гироскопа, усилителя стабилизации и датчика момента платформы. Волновой твердотельный гироскоп при этом работает в интегрирующем режиме и его упругая волна находится на одном угле относительно резонатора. Современные следящие контуры системы гиро-стабилизации платформенных инерциальных навигационных систем имеют высокую точность, позволяющие реализовать потенциальную точность волнового твердотельного гироскопа. Работа волнового твердотельного гироскопа в гироплатформе происходит без воздействия со стороны датчиков силы гироскопа на его резонатор с целью управления угловым положением упругой волны в нем, как это имеет место при работе в режиме датчика угловой скорости, что исключает погрешности, обусловленные этим воздействием.
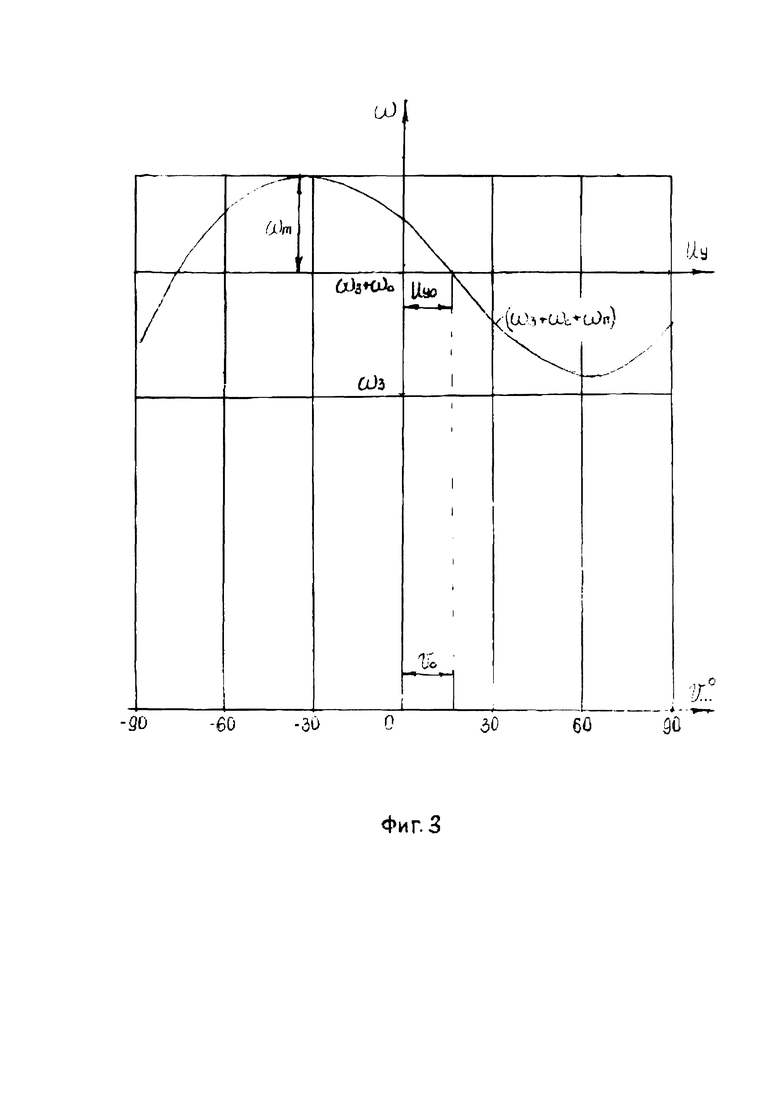
На фиг. 3 показаны характерная зависимость показаний волнового твердотельного гироскопа, установленного на неподвижном относительно Земли основании, при разных угловых положениях упругой волны в резонаторе.
Составляющие показаний ω. волнового твердотельного гироскопа в этом случае являются проекция ωз угловой скорости Земли на ось чувствительности гироскопа, постоянная составляющая ωo скорости дрейфа гироскопа, переменная составляющая ωп скорости дрейфа.
Постоянная составляющая ωo скорости дрейфа практически не зависит от углового положения упругой волны в резонаторе и при калибровке может быть определена на одном угле упругой волны и алгоритмически скомпенсирована.
Переменная составляющая ωп является гармонической функцией от положения упругой волны в резонаторе, которую можно представить следующим образом

где ωm - амплитуда переменной составляющей скорости дрейфа,
ϑo - начальный фазовый угол,
k - номер гармоники.
Кроме того, что переменная составляющая скорости дрейфа синусоидальным образом зависит от углового положения упругой волны в резонаторе, но также на каждом угле упругой волны в резонаторе имеется разная чувствительность к эксплуатационным факторам.
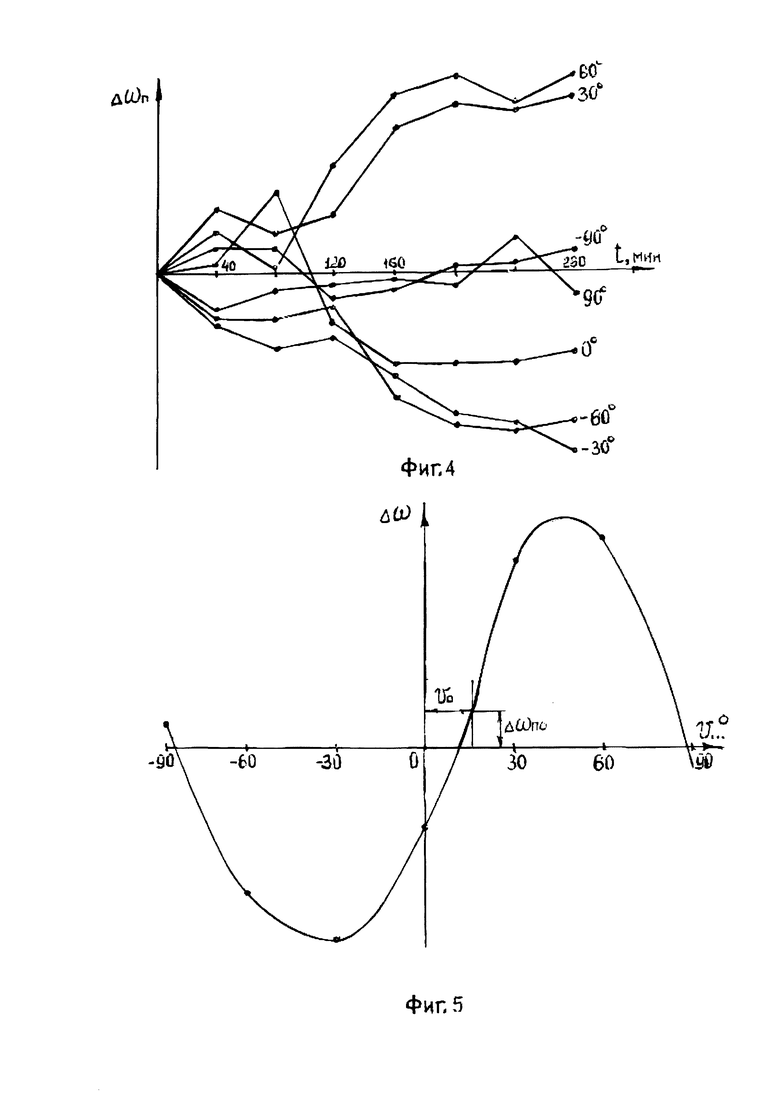
На фиг. 4 представлены типичные экспериментальные зависимости изменения в длительном запуске переменной составляющей скорости дрейфа волнового твердотельного гироскопа на разных углах упругой волны в резонаторе.
На фиг. 5 показано конечное изменение в длительном запуске переменной составляющей скорости дрейфа волнового твердотельного гироскопа на разных углах упругой волны в резонаторе.
Изменение скорости дрейфа Δω в длительном запуске определялось следующим образом
где ωн - значение скорости дрейфа в начале запуска,
ωк - значение скорости дрейфа в конце запуска.
Из зависимостей, представленных на фиг. 4 и фиг. 5, видно, что имеются угловые положения упругой волны, при которых изменение скорости дрейфа в запуске минимизируются. Такими положениями упругой волны в резонаторе будут зоны вблизи углов -84°, 12°, 90°.
В предлагаемом способе угловое положение упругой волны в резонаторе, минимизирующее изменение скорости дрейфа в запуске, при работе волнового твердотельного гироскопа в режиме одноосного гиростабилизатора определяется следующим образом. Предварительно перед рабочим запуском волновой твердотельный гироскоп, работающий в режиме гиростабилизатороа, размещают на неподвижном относительно Земли основании. Включают гиростабилизатор с волновым твердотельным гироскопом. Производят приведение упругой волны в заданные угловые положения в резонаторе. Для этого на вход усилителя стабилизации 4 (см. фиг. 1, фиг. 2) подают сигналы уставки Uyi с датчика 6 команд системы приведения упругой волны в резонаторе на заданный угол, устанавливая упругую волну в требуемые положения, которые измеряют с помощью системы 3 выработки углового положения упругой волны в резонаторе. На заданных углах упругой волны также измеряют угловую скорость основания гиростабилизатора с помощью датчика угловой скорости, расположенного на оси стабилизированной платформы. На основе заданных и измеренных значений Uyi, ϑi, ωi определяют зависимость ω (ϑ), ω (Uy), например, методом наименьших квадратов.

а также соответствующую ей зависимость

где k1 - масштабный коэффициент перевода сигнала уставки в угол положения упругой волны в резонаторе;
Uyo - начальный фазовый сдвиг, соответствующий сигналу уставки.
Из зависимости (см. фиг. 3) выделяют зависимость переменной составляющей скорости дрейфа.

где ωmax - максимальное значение, измеренной угловой скорости,
ωmin - минимальное значение, измеренной угловой скорости.
Находим минимальное значение сигнала уставки Uy, обращающее найденную зависимость переменной составляющей скорости дрейфа ωп в нуль.

Откуда

В рабочем режиме, определенное значение сигнала уставки Uyo, подают на усилитель 4 системы приведения и стабилизации с помощью датчика команд 6 системы приведения упругой волны в резонаторе на заданный угол. При этом упругая волна устанавливается в резонаторе на угле ϑ=-ϑo, на котором минимизируется переменная составляющая скорости дрейфа и изменение скорости дрейфа волнового твердотельного гироскопа в запуске.
Таким образом, предлагаемый способ повышения точности измерения угловой скорости с помощью волнового твердотельного гироскопа имеет следующие отличия от известного способа:
- в предварительной подготовительной к работе операции вводятся новые действия, связанные со стабилизацией волнового твердотельного гироскопа в инерциальном пространстве по углу поворота его корпуса вокруг оси чувствительности;
- в предварительной подготовительной к работе операции вводятся новые действия, связанные с обеспечением установки упругой волны в резонаторе в угловое положение, при котором минимизируются переменная составляющая скорости дрейфа гироскопа, зависящая от углового расположения упругой волны в резонаторе, и изменение скорости дрейфа волнового твердотельного гироскопа в запуске;
- в рабочей операции по измерению угловой скорости вводятся новые действия, связанные с выработкой выходного сигнала показаний, который снимается с датчика угловой скорости, расположенного на оси стабилизированной платформы параллельной оси чувствительности волнового твердотельного гироскопа;
- в рабочей операции по измерению волновым твердотельным гироскопом угловой скорости получено новое качество, при котором обеспечена работоспособность волнового твердотельного гироскопа при больших угловых скоростях высокоманевренных объектов с нахождением упругой волны на одном угле в резонаторе;
- в рабочей операции по измерению волновым твердотельным гироскопом угловой скорости получено новое качество, при котором обеспечена работа гироскопа в одном угловом положении упругой волны без воздействия на нее, управляющих ее угловым положением сил со стороны электростатических датчиков сил гироскопа;
- в рабочей операции по измерению волновым твердотельным гироскопом угловой скорости предложен новый режим его работы, при котором он работает как интегрирующий гироскоп, но при этом угловое положение его упругой волны в резонаторе всегда постоянно при наличии входной угловой скорости, характерной для высокоманевренных объектов.
На фиг. 1 представлена блок-схема волнового твердотельного гироскопа в системе приведения упругой волны в резонаторе на заданный угол и стабилизации в инерциальном пространстве корпуса гироскопа по углу его поворота вокруг оси чувствительности.
На фиг. 2 показана функциональная схема стабилизации волнового твердотельного гироскопа в инерциальном пространстве по углу поворота его корпуса вокруг оси чувствительности, выработки показаний и приведения упругой волны на заданный угол в резонаторе.
На фиг. 3 представлена характерная зависимость показаний волнового твердотельного гироскопа, установленного на неподвижном относительно Земли основании, при разных угловых положениях упругой волны в резонаторе.
На фиг. 4 показаны типичные экспериментальные изменения в длительном запуске переменной составляющей скорости дрейфа волнового твердотельного гироскопа на разных углах упругой волны в резонаторе.
На фиг. 5 представлено конечное изменение в длительном запуске переменной составляющей скорости дрейфа волнового твердотельного гироскопа на разных углах упругой волны в резонаторе.
Для построения одноосного гиростабилизатора на основе волнового твердотельного гироскопа с системой приведения упругой волны на заданный угол в резонаторе разработаны блок-схема и функциональная схема, представленные на фиг. 1 и фиг. 2. Для реализации схем, показанных на фиг. 1 и фиг. 2, выбраны в качестве:
- электромеханических элементов, электронных узлов гиростабилизатора - элементы и узлы серийной платформенной инерциальной навигационной системы ИНС-2000 (АО "ИТТ", Раменское);
- датчика угла, расположенного на оси стабилизированной платформы - серийный точный энкодер;
- волнового твердотельного гироскопа и его сервисной электроники, системы выработки углового положения упругой волны в резонаторе - опытный образец волнового твердотельного гироскопа ДВГ-1 и его сервисная электроника, система выработки угла положения упругой волны в резонаторе, разработанные АО «Инерциальные технологии «Технокомплекса» (см. патент №2541711 (РФ). Твердотельный волновой гироскоп / С.П. Редькин, И.В. Назаров, К.А. Бахонин, А.В. Алехин, В.М. Соловьев, Ю.Г. Терсенов // Б.И. - 2015. - №5). Экспериментально исследовалось влияние выбора угла расположения упругой волны в резонаторе, минимизирующего переменную составляющую скорости дрейфа, на величину изменения в запуске скорости дрейфа волнового твердотельного гироскопа. Определялась зависимость переменной составляющей скорости дрейфа волнового твердотельного гироскопа от угла расположения упругой волны в резонаторе, которая представлена на фиг. 3. С помощью этой зависимости находили угол ϑo расположения упругой волны в резонаторе, который минимизировал переменную составляющую скорости дрейфа.
Для полученной зависимости угол составил ϑo=12,8…°. Для этого угла и возможных других рабочих углов, если не проводить приведения упругой волны на минимизирующий переменную составляющую скорости дрейфа угол, экспериментально получены конечные изменения скорости дрейфа волнового твердотельного гироскопа в запуске длительностью 280 мин, которые показаны на фиг. 5. Зависимость на фиг. 5 показывает, что применение предлагаемого способа позволяет значительно повысить точность волнового твердотельного гироскопа. Так изменение скорости дрейфа в запуске Δωпо на выбранном угле ϑo=12,8…° упругой волны в несколько раз может быть меньше по сравнению со случаем, когда упругая волна находится на других углах.
Таким образом, использование предлагаемого способа повышения точности измерения угловой скорости с помощью волнового твердотельного гироскопа позволяет:
- повысить его точность при наличии угловой зависимости физических характеристик резонатора гироскопа;
- обеспечить работоспособность твердотельного волнового гироскопа на высокоманевренных объектах при работе в новом предложенном интегрирующем режиме при всегда постоянном угловом положении упругой волны в резонаторе без воздействия на резонатор сил, управляющих положением упругой волны.
Отмеченные положительные качества, появляющиеся при реализации предлагаемого способа, расширяют область применения волнового твердотельного гироскопа, например, возникает возможность его использования в инерциальных системах ориентации и навигации среднего и высокого класса точности на высокоманевренных авиационных, морских, космических и наземных объектах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МАСШТАБНОГО КОЭФФИЦИЕНТА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА НА ПОВОРОТНОМ СТОЛЕ | 2012 |
|
RU2579768C2 |
| СПОСОБ АЛГОРИТМИЧЕСКОЙ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ СКОРОСТИ ДРЕЙФА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2011 |
|
RU2480713C1 |
| СПОСОБ АВТОНОМНОЙ НАЧАЛЬНОЙ ВЫСТАВКИ СТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА В ПЛОСКОСТЬ ГОРИЗОНТА И НА ЗАДАННЫЙ АЗИМУТ | 2015 |
|
RU2608337C1 |
| Способ калибровки гироблоков платформы трехосного гиростабилизатора | 2020 |
|
RU2757854C1 |
| ИНЕРЦИАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО С ЦИФРОВЫМ СРЕДСТВОМ УПРАВЛЕНИЯ | 2019 |
|
RU2731656C1 |
| СПОСОБ АВТОНОМНОЙ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА НА ПОДВИЖНОМ ОСНОВАНИИ | 2013 |
|
RU2541710C1 |
| СПОСОБ КАЛИБРОВКИ АКСЕЛЕРОМЕТРОВ | 2002 |
|
RU2249793C2 |
| Способ калибровки систематической составляющей угловой скорости дрейфа поплавкового гироскопа | 2024 |
|
RU2829458C1 |
| ТРЕХОСНЫЙ ГИРОСКОПИЧЕСКИЙ БЛОК | 2007 |
|
RU2344287C2 |
| Способ регулировки динамически настраиваемого гироскопа в составе инерциальной навигационной системы | 2020 |
|
RU2741501C1 |
Изобретение относится к области приборостроения и может быть использовано для повышения точности измерения угловой скорости с помощью волнового твердотельного гироскопа в составе инерциальных систем ориентации и навигации. Для повышения точности измерения угловой скорости с помощью волнового твердотельного гироскопа стабилизируют в инерциальном пространстве его корпус по углу поворота вокруг оси чувствительности, для чего располагают гироскоп на платформе гиростабилизатора в качестве гиродатчика осью чувствительности параллельно оси гиростабилизатора, на которой устанавливают датчик угловой скорости корпуса гиростабилизатора относительно его платформы, затем гиростабилизатор размещают на неподвижном относительно Земли основании, включают гиростабилизатор с волновым твердотельным гироскопом и производят приведение упругой волны в заданные угловые положения в резонаторе, для чего на вход усилителя стабилизации подают сигнал уставки, устанавливая упругую волну на разные углы, которые измеряют системой выработки углового положения упругой волны в резонаторе, а также на этих углах определяют угловые скорости основания гиростабилизатора с помощью датчика угловой скорости, расположенного на оси стабилизатора платформы, на основе которых находят угловое положение упругой волны в резонаторе и соответствующий ему сигнал уставки, при которых переменная составляющая скорости дрейфа волнового твердотельного гироскопа минимальна, затем в рабочем режиме располагают упругую волну в резонаторе на угле, минимизирующем переменную скорость дрейфа, для чего на вход усилителя стабилизатора подают ранее найденный сигнал уставки, и измеряют угловую скорость по оси чувствительности волнового твердотельного гироскопа, используя показания датчика угловой скорости, установленного на оси стабилизированной платформы. 5 ил.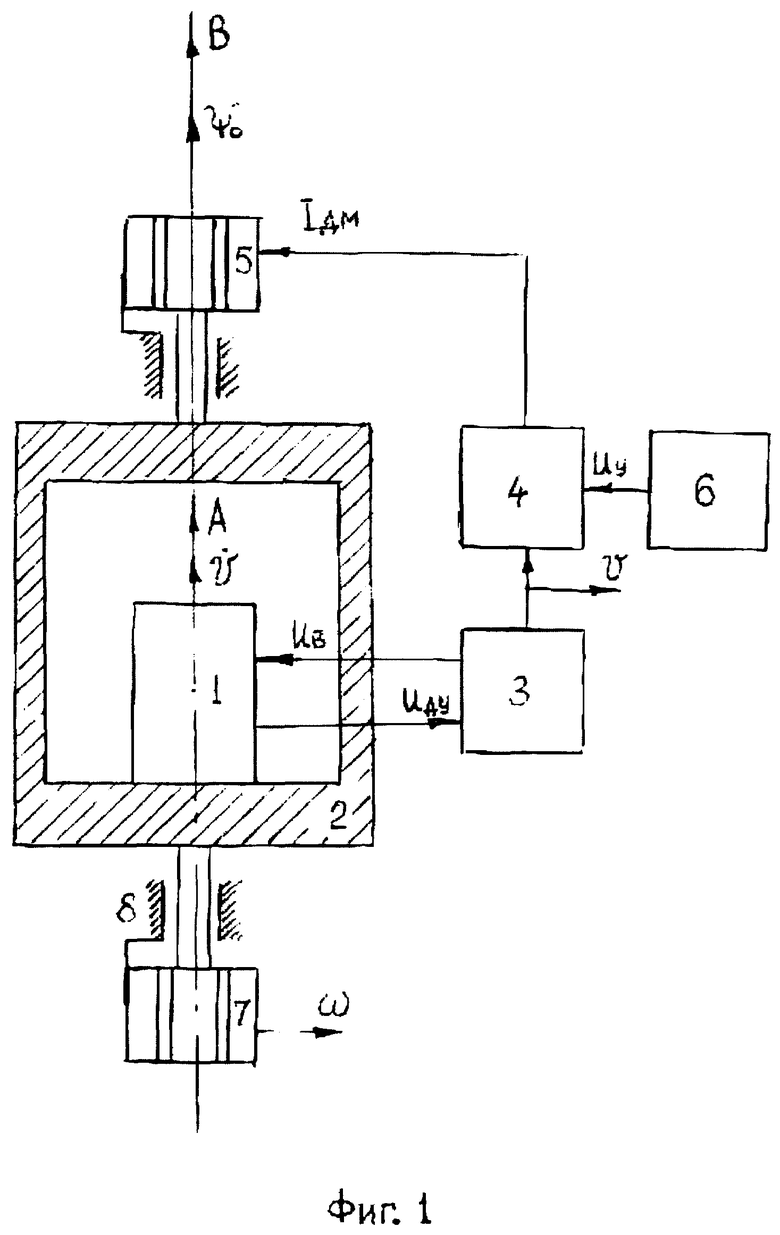
Способ измерения угловой скорости с помощью волнового твердотельного гироскопа, включающий первоначально запуск гироскопа с образованием в его полусферическом резонаторе упругой волны с требуемыми параметрами в ее нулевом угловом положении, измеряемом системой выработки ее углового положения в резонаторе, последующим рабочим режимом, в котором упругая волна всегда находится на одном угле относительно резонатора, отличающийся тем, что предварительно волновой твердотельный гироскоп стабилизируют в инерциальном пространстве по углу поворота его корпуса вокруг оси чувствительности, для чего его располагают на платформе одноосного гиростабилизатора в качестве гиродатчика осью чувствительности параллельно оси гиростабилизатора, на которой устанавливают датчик угловой скорости корпуса гиростабилизатора относительно платформы, затем гиростабилизатор размещают на неподвижном относительно Земли основании, после этого включают гиростабилизатор с волновым твердотельным гироскопом и производят приведение упругой волны в заданные угловые положения в резонаторе, для чего на вход усилителя стабилизации подают сигналы уставки Uyi, устанавливая упругую волну сначала на угол -90°, а от него на углы  которые измеряют системой выработки углового положения упругой волны в резонаторе, а также на этих углах определяют угловые скорости основания ωi гиростабилизатора с помощью датчика угловой скорости, расположенного на оси стабилизированной платформы, на основе измеренных сигналов уставки, угловых положений упругой волны в резонаторе и соответствующих им угловых скоростей основания гиростабилизатора находят угловое положение упругой волны в резонаторе ϑo и соответствующий ему сигнал уставки Uyo, при которых переменная составляющая скорости дрейфа ωп волнового твердотельного гироскопа минимальна, затем в рабочем режиме располагают упругую волну в резонаторе на угле ϑo, для чего на вход усилителя стабилизатора подают сигнал уставки Uyo и измеряют угловую скорость по оси чувствительности волнового твердотельного гироскопа, используя показания ω датчика угловой скорости, установленного на оси гиростабилизированной платформы.
которые измеряют системой выработки углового положения упругой волны в резонаторе, а также на этих углах определяют угловые скорости основания ωi гиростабилизатора с помощью датчика угловой скорости, расположенного на оси стабилизированной платформы, на основе измеренных сигналов уставки, угловых положений упругой волны в резонаторе и соответствующих им угловых скоростей основания гиростабилизатора находят угловое положение упругой волны в резонаторе ϑo и соответствующий ему сигнал уставки Uyo, при которых переменная составляющая скорости дрейфа ωп волнового твердотельного гироскопа минимальна, затем в рабочем режиме располагают упругую волну в резонаторе на угле ϑo, для чего на вход усилителя стабилизатора подают сигнал уставки Uyo и измеряют угловую скорость по оси чувствительности волнового твердотельного гироскопа, используя показания ω датчика угловой скорости, установленного на оси гиростабилизированной платформы.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 2013 |
|
RU2544308C9 |
| Лебедка для буксирования самолетом конусов и мишеней | 1947 |
|
SU73632A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ И ВИБРАЦИОННЫЙ ГИРОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334197C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| WO 2010046585 A1, 29.04.2010 | |||
| US 9157739 B1, 13.10.2015. | |||

