Изобретение относится к твердотельным волновым гироскопам (ТВГ), имеющим систему управления коррекции собственных осей жесткости. При производстве возникает задача контроля и оценки его физических параметров: добротность, разнодобротность, ось наименьшей добротности, ось наибольшей жесткости, разночастотность. Контроль параметров на всех этап производственного цикла позволят прогнозировать качество продукции и своевременно выявлять факторы брака. Что приводит к сокращению затрат при производстве.
Известно устройство и метод для проверки рабочих характеристик полусферического резонатора твердотельного волнового гироскопа (CN 210533392 U), которое содержит станцию проверки гироскопа со всей необходимой электроникой, при этом станция проверки гироскопа содержит поворотный стол и устройство управления, корпус для крепления гироскопа, расположенный над поворотным столом. Станция тестирования снабжена зажимным механизмом, расположенным в середине рабочего стола. Устройство для закрепления гироскопа на поворотном столе для проведения динамических испытаний, позволяет вращать волновую картину гироскопа.
Недостатками данного устройства является наличие поворотного стола, который вводит ряд ограничений, таких как габариты стенда, необходимость в использовании специализированной оснастки, погрешность, вносимую поворотным столом, разработка дополнительных методик испытаний и высокие требования к сервисному обслуживанию. Реализация поворотных токоподводов, может привести к появлению электрических шумов, помех и погрешностей измерения. Повышается стоимость изготовления стенда, из-за высокой стоимости прецизионных поворотных столов.
Альтернативным подходом является управление вращением волновой картиной, без использования поворотных столов, используя возможности системы управления, входящей в состав твердотельного волнового гироскопа с использованием математической модели позволяющей оценить физические параметры резонатора ТВГ.
Техническим результатом является упрощение процесса определения физических параметров резонатора твердотельного волнового гироскопа за счет исключения внешнего воздействия на резонатор.
Указанный технический результат достигается тем, что способ контроля физических параметров резонатора твердотельного волнового гироскопа (ТВГ) заключается в закреплении датчика ТВГ в технологической оснастке для съема и передачи сигналов в блок управления, при проведении динамических испытаний изменение угловой ориентации стоячей волны производят без внешнего воздействия с помощью создания управляемого дрейфа за счет поддержания заданного значения квадратурной составляющей колебаний резонатора ТВГ.
Физические параметры резонатора измеряют по регистрации собственной динамики колебаний резонатора без воздействия системы управления в различных угловых положениях стоячей волны.
Для проведения измерений в режиме свободного выбега в различных угловых ориентациях стоячей волны, изменение углового положения волны производят за счет поддержания скорости дрейфа прямо пропорциональной величине квадратуры.
Устройство для реализации способа контроля физических параметров резонатора твердотельного волнового гироскопа содержит ТВГ, технологическую оснастку для закрепления датчика и его подключения через кабель, соединяющий датчик с блоком управления, который содержит соединенные между собой платы управления, буферные платы и платы питания.
Устройство позволяет реализовать поворот волновой картины без поворота ТВГ, что позволяет исключить поворотный стол из существующих устройств направленных на проверку характеристик полусферических резонаторов твердотельных волновых гироскопов.
Поворот волновой картины реализуется за счет работы контура управления квадратурной составляющей волны платы управления.
Способ контроля физических параметров резонатора твердотельного волнового гироскопа реализуют следующим образом.
Устанавливают датчик ТВГ в технологическую оснастку и включают устройство.
Программное обеспечение блока управления предполагает следующие режимы управления стоячей волной:
- переходный процесс, который характеризуется поднятием амплитуды колебаний до рабочих значений и подавлением квадратурной составляющей колебаний.
- свободный выбег, который характеризуется полным отключением управляющего воздействия на резонатор во время работы.
- вращение стоячей волны, которое характеризуется направленным изменением угловой ориентации стоячей волны, посредством создания квадратуры колебаний.
Последовательность переключения режимов: переходный процесс, свободный выбег, переходный процесс, вращение волны, затем режимы повторяются.
Управление колебаниями резонатора реализуется тремя системами обратной связи, поддерживающими требуемые значения для амплитуды, квадратуры и фазы. В рабочем режиме блок управления производит поддержание амплитуды колебаний, а также подавление квадратурной составляющей колебаний, через минимизацию сигнала рассогласования. Внешнее воздействие блока управления приводит к уменьшению квадратуры и тем самым минимизирует сигнал рассогласования.
Оценку физических параметров (добротность, разнодобротность, ось наименьшей добротности, ось наибольшей жесткости, разночастотность) ТВГ получают по изменению волновой картины, используя математическую модель динамики резонатора в режиме свободного выбега. Для измерения физических параметров резонатора ТВГ, данные измерений колебательной картины (амплитуда основных колебаний(а), квадратурная составляющая колебаний(b), угловая ориентация стоячей волны(θ), полученные при работе блока управления в режиме свободного выбега, применяются в математической модели:



В динамике колебаний резонатора существуют устойчивые угловые положения, в которых отсутствует собственный дрейф стоячей волны. Регистрация колебаний резонатора в режиме свободного выбега в этих угловых положениях не позволяет достоверно оценить физические параметры резонатора вследствие незначительных изменений в колебательной картине. Для повышения точности требуется проведение измерений динамики резонатора в режиме свободного выбега в нескольких угловых положениях так, чтобы обеспечить измерение колебаний резонатора вне этих устойчивых положений. Таким образом, для повышения точности определения физических параметров резонатора ТВГ измерение поведения резонатора производят в течение нескольких циклов переключения режимов работы блока управления. Количество циклов переключений обусловлено необходимой точностью оценки физических параметров.
Для решения полученной избыточной системы уравнений может быть использован метод наименьших квадратов. Получаем вектор неизвестных g=(g1, g2c, g2s, g3, g4c g4s)Т. Далее для расчета физических параметров резонатора используются следующие формулы:
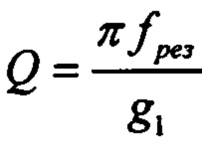 - добротность (fрез - круговая резонансная частота, Гц);
- добротность (fрез - круговая резонансная частота, Гц);
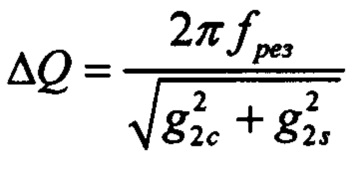 - разнодобротность;
- разнодобротность;
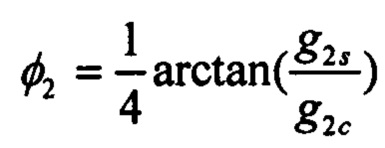 - ось наименьшей добротности, рад;
- ось наименьшей добротности, рад;
 - ось наибольшей жесткости, рад;
- ось наибольшей жесткости, рад;
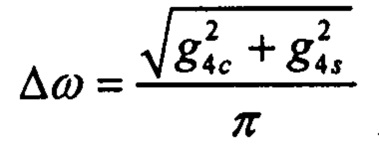 - разночастотность, Гц.
- разночастотность, Гц.
Таким образом, способ контроля физических параметров резонатора твердотельного волнового гироскопа позволяет проводить динамические испытания для определения физических параметров ТВГ необходимых для оценки точностных характеристик, без использования поворотного стенда.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА (ВАРИАНТЫ) | 2012 |
|
RU2521783C2 |
| Способ считывания и управления колебаниями волнового твердотельного гироскопа | 2018 |
|
RU2670245C1 |
| МАЛОГАБАРИТНЫЙ ТВЕРДОТЕЛЫЙ ВОЛНОВОЙ ГИРОСКОП | 2007 |
|
RU2362121C2 |
| Способ определения дисбаланса масс полусферического резонатора твердотельного волнового гироскопа | 2017 |
|
RU2688834C2 |
| ТРЕХОСНЫЙ ГИРОСКОПИЧЕСКИЙ БЛОК | 2007 |
|
RU2344287C2 |
| Пространственный интегрирующий твердотельный волновой гироскоп | 2020 |
|
RU2763688C1 |
| Твердотельный волновой гироскоп | 2019 |
|
RU2708907C1 |
| Способ считывания и управления колебаниями волнового твердотельного гироскопа | 2019 |
|
RU2704334C1 |
| Способ и система компенсации дрейфа твердотельного волнового гироскопа | 2016 |
|
RU2619815C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2013 |
|
RU2541711C1 |
Изобретение относится к твердотельным волновым гироскопам (ТВГ), имеющим систему управления коррекции собственных осей жесткости. Способ контроля физических параметров резонатора ТВГ заключается в закреплении датчика ТВГ в технологической оснастке для съема и передачи сигналов в блок управления. При этом проводят динамические испытания, состоящие из последовательности переключения режимов: переходный процесс, свободный выбег, переходный процесс, вращение волны, а изменение угловой ориентации стоячей волны производят без внешнего воздействия с помощью создания управляемого дрейфа за счет поддержания заданного значения квадратурной составляющей колебаний резонатора ТВГ. Физические параметры резонатора измеряют по регистрации собственной динамики колебаний резонатора без воздействия системы управления в различных угловых положениях стоячей волны, а для проведения измерений в режиме свободного выбега в различных угловых ориентациях стоячей волны изменение углового положения волны производят за счет поддержания скорости дрейфа прямо пропорциональной величине квадратуры. Технический результат – упрощение процесса определения физических параметров резонатора ТВГ за счет исключения внешнего воздействия на резонатор.
Способ контроля физических параметров резонатора твердотельного волнового гироскопа (ТВГ), заключающийся в закреплении датчика ТВГ в технологической оснастке для съема и передачи сигналов в блок управления, отличающийся тем, что проводят динамические испытания, состоящие из последовательности переключения режимов: переходный процесс, свободный выбег, переходный процесс, вращение волны, а изменение угловой ориентации стоячей волны производят без внешнего воздействия с помощью создания управляемого дрейфа за счет поддержания заданного значения квадратурной составляющей колебаний резонатора ТВГ, причем физические параметры резонатора измеряют по регистрации собственной динамики колебаний резонатора без воздействия системы управления в различных угловых положениях стоячей волны, а для проведения измерений в режиме свободного выбега в различных угловых ориентациях стоячей волны изменение углового положения волны производят за счет поддержания скорости дрейфа прямо пропорциональной величине квадратуры.
| Способ и система компенсации дрейфа твердотельного волнового гироскопа | 2016 |
|
RU2619815C1 |
| Способ определения дисбаланса масс полусферического резонатора твердотельного волнового гироскопа | 2017 |
|
RU2688834C2 |
| Способ считывания и управления колебаниями волнового твердотельного гироскопа | 2019 |
|
RU2704334C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ОРИЕНТАЦИИ СТОЯЧЕЙ ВОЛНЫ В ТВЕРДОТЕЛЬНОМ ВОЛНОВОМ ГИРОСКОПЕ | 2012 |
|
RU2526585C2 |
| СПОСОБ СЧИТЫВАНИЯ И УПРАВЛЕНИЯ ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА С ОПТИЧЕСКИМИ ДАТЧИКАМИ КОЛЕБАНИЙ РЕЗОНАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2194947C1 |
| EP 3096111 B1, 30.10.2019. | |||

