Изобретение относится к машиностроению и может быть использовано в транспорте в качестве колесного движителя для вездехода.
Известен колесный привод, описанный на сайте (http://alternathistory.org.ua/node/7781). Платформа снабжена 4-мя колесными блоками - движителями, каждый из которых состоит из трех миниатюрных пневмокатков с шестеренным приводом, размещенных на концах радиальных кронштейнов, вращающихся на центральной оси. В зависимости от положения движителей вездеход может двигаться на 4, 6 или 8 катках со скоростью до 32 км/ч, а при включении привода кронштейнов катки накатываются на препятствия сверху, имитируя процесс перешагивания через них.
Недостатком данной конструкции является то, что не все колеса контактируют с грунтом и, соответственно, не участвуют в движении транспорта постоянно, а только при преодолении больших препятствий, при этом крутящий момент передается на них постоянно. В результате контакт с грунтом, который мог бы быть более эффективным, снижается, так как минимум одно колесо находится в верхнем положении. Кроме этого, при включении привода кронштейнов имитируется процесс перешагивания через препятствие для получения высокой проходимости, и при этом производится подъем центра тяжести платформы еще до момента наезда на препятствие, что является энергетически затратным. Так как платформа колесного привода выступает за блоки движителей, то преодоление препятствий с большим углом проблематично - первой с препятствием будет взаимодействовать платформа колесного движителя. Такое расположение колес вокруг оси вращения ограничивает их применение по габаритам, невозможно использовать колеса большего диаметра. Если же установить колесо на вал вращения кронштейнов диаметром, равным отрезку, проходящему от центра вала привода вращения кронштейнов до центра вращения колеса на кронштейне, плюс радиус этого колеса, то такое колесо при тех же оборотах, что колеса кронштейна, будет обладать большей скоростью, но меньшей проходимостью. Таким образом, в целях увеличения скорости перемещения колесного привода необходимо увеличить радиус колеса до размеров, равных отрезку, проходящему от центра вала привода вращения кронштейнов до центра вращения колеса на кронштейне, плюс радиус этого колеса. При этом обязательно сохранить уровень проходимости колесного привода, как у описанного выше аналога. Понятно, что высота препятствия для колеса не может превышать его радиус, а значит, выигрывая в скорости, потеряем в проходимости. То есть данный аналог превосходит колесный движитель в проходимости, но уступает ему в скорости.
Известен автомобиль, который состоит из несущей рамы, колес и трансмиссии как совокупности механизмов и агрегатов для передачи крутящего момента от двигателя к ведущим колесам автомобиля. Трансмиссия предназначена для изменения величины крутящего момента, а также для изменения направления движения. Если мы имеем переднеприводный автомобиль, то крутящий момент от мотора к колесам передается на передние колеса, если заднеприводный - то на задние колеса. Также выпускаются автомашины с четырьмя ведущими колесами.
Недостатком такой конструкции является то, что она ограничена в возможностях перемещения по пересеченной местности. Поскольку высота препятствия, которое может преодолеть круглое колесо, не может превышать его радиус. Таким образом, данный аналог имеет значительные ограничения по проходимости.
Техническая задача, которая вытекает из вышеизложенного, заключается в следующем: создать колесный движитель, обладающий скоростью эквивалентного колеса или его радиусу, равному отрезку, проходящему от центра вала привода вращения кронштейнов до центра вращения колеса на кронштейне, плюс радиус этого колеса, а также обладающий повышенной проходимостью, не меньшей, чем у аналога (http://alternathistorv.org.ua/node/7781).
Предлагаемым изобретением решается задача расширения технических возможностей колесного движителя и более широкого применения его на пересеченной местности и в труднопроходимых местах.
Для достижения этого технического результата в колесном движителе, состоящем из платформы, снабженной колесами и приводами колес, колеса той же длины окружности выполнены в виде эллипса, одни эллипсоидные колеса установлены на коромысла, шарнирно соединенные с платформой через ось, проходящую посередине между осями колес, установленных на коромысло, а другие - на рычаги, шарнирно связанные с коромыслом, причем эллипсоидные колеса, установленные на коромысла и шарнирно соединенные с ними рычаги, расположены друг к другу взаимно перпендикулярно большими осями эллипсов и их вращение синхронизировано, при этом оси эллипсоидных колес, установленных на рычаги, выходят за пределы габаритов платформы, кроме того, возможность свободного поворота коромысла и рычага на осях в вертикальной плоскости ограничена.
Отличительным признаком предлагаемого колесного движителя является то, что колеса той же длины окружности выполнены в виде эллипса, одни эллипсоидные колеса установлены на коромысла, шарнирно соединенные с платформой через ось, проходящую посередине между осями колес, установленных на коромысло, а другие - на рычаги, шарнирно связанные с коромыслом, причем эллипсоидные колеса, установленные на коромысла и шарнирно соединенные с ними рычаги, расположены друг к другу взаимно перпендикулярно большими осями эллипсов и их вращение синхронизировано, при этом оси эллипсоидных колес, установленных на рычаги, выходят за пределы габаритов платформы, кроме того, возможность свободного поворота коромысла и рычага на осях в вертикальной плоскости ограничена.
Проведенное компьютерное моделирование показало, что предлагаемый движитель преодолевает препятствия высотой, превышающей не менее двух диаметров эквивалентного по длине окружности колеса. Такие технические характеристики значительно увеличивают возможности применения движителя в песчаных грунтах, болотистой и пересеченной местности, а также в условиях глубокого снежного покрова грунта или ледяных торосов.
Вариант предлагаемого колесного движителя иллюстрируется чертежами, представленными на фиг. 1-9.
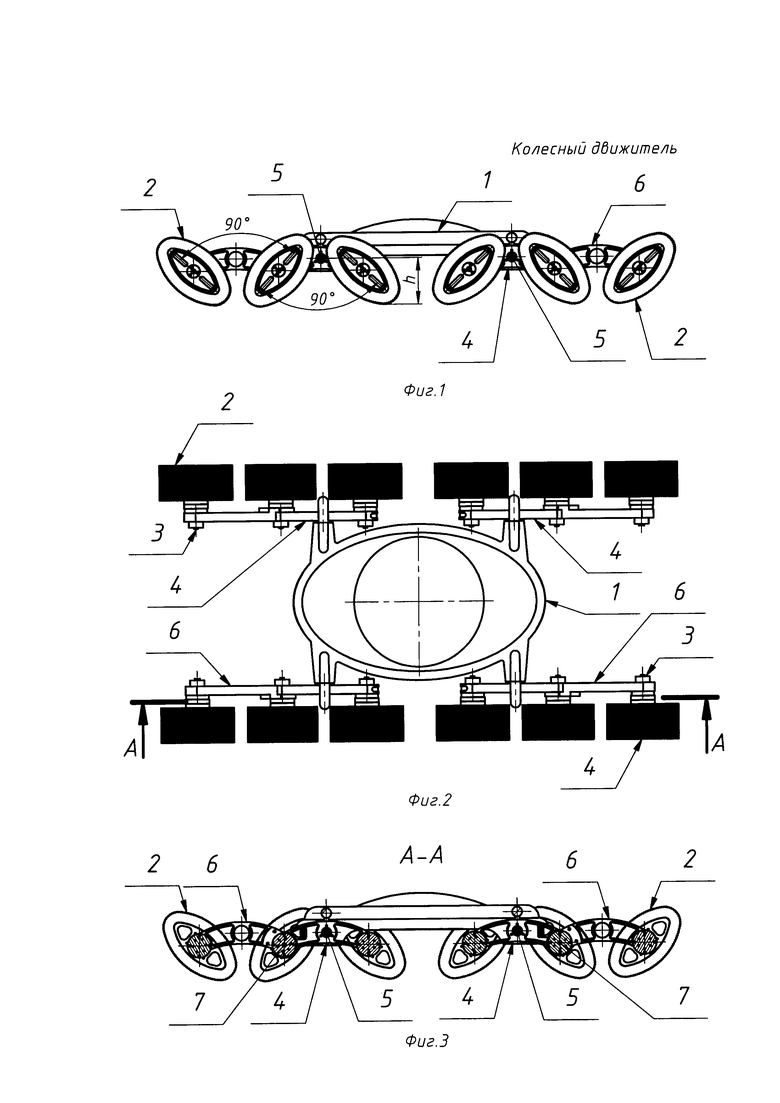
На фиг. 1 - вид сбоку колесного движителя;
на фиг. 2 - то же, вид сверху;
на фиг. 3 - разрез по А-А;
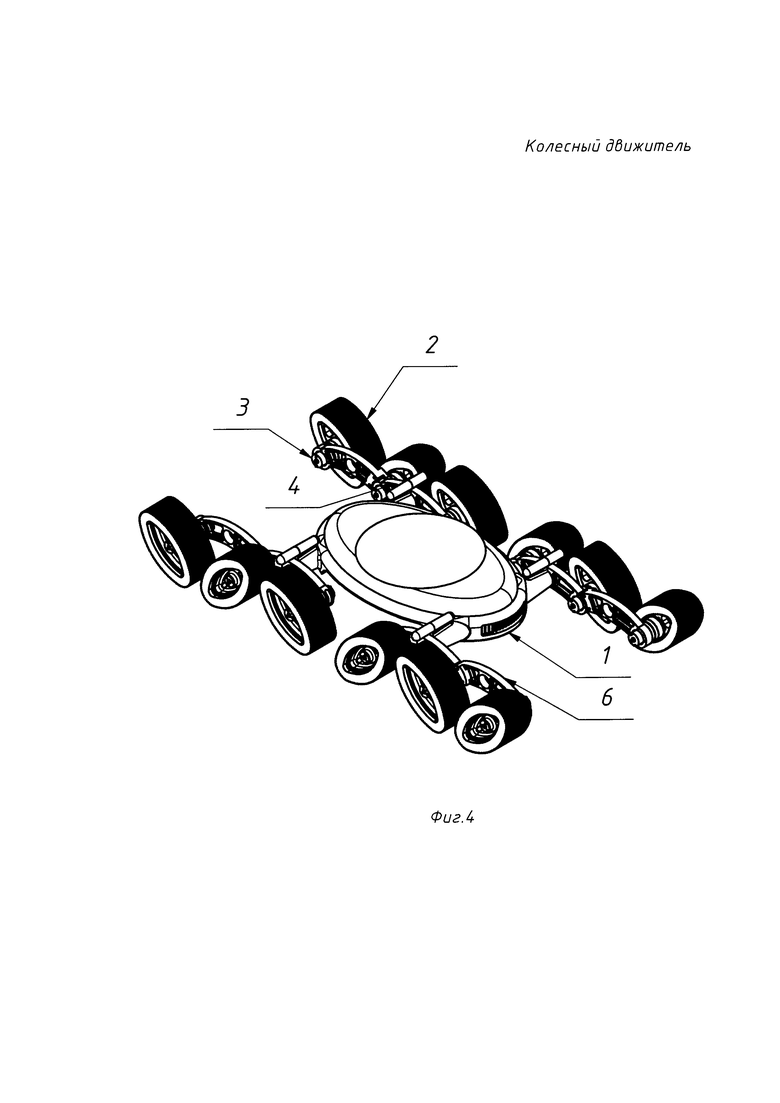
на фиг. 4 - вид в изометрии;
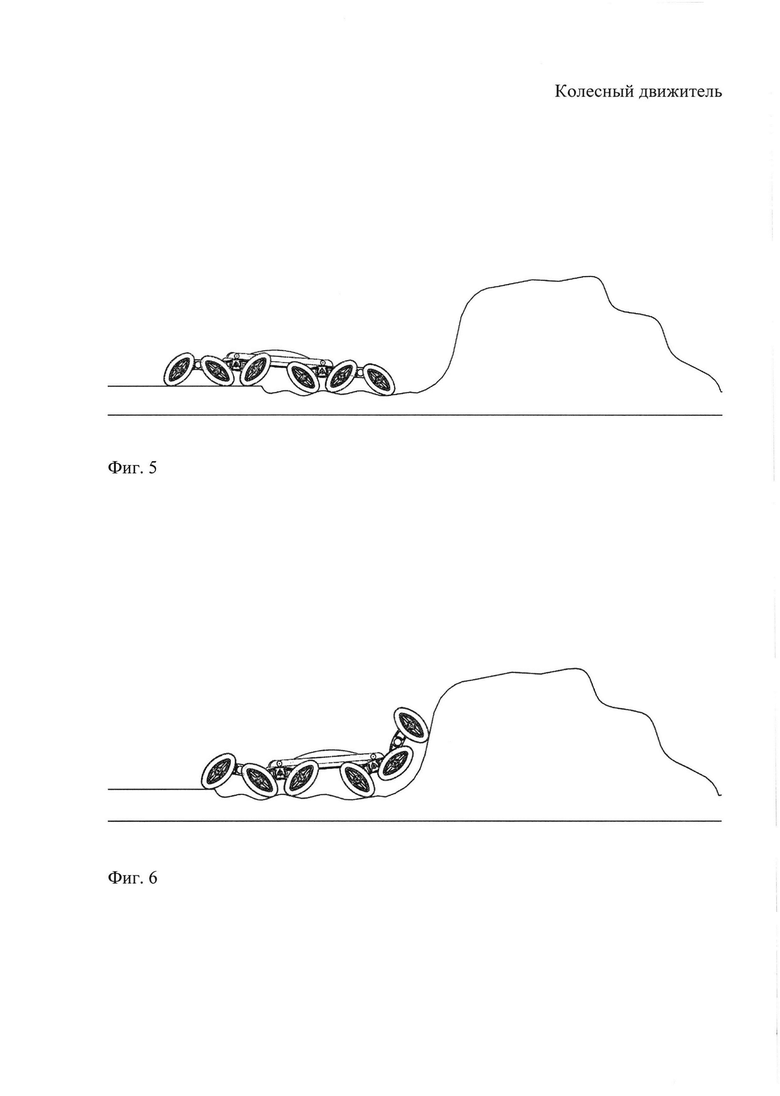
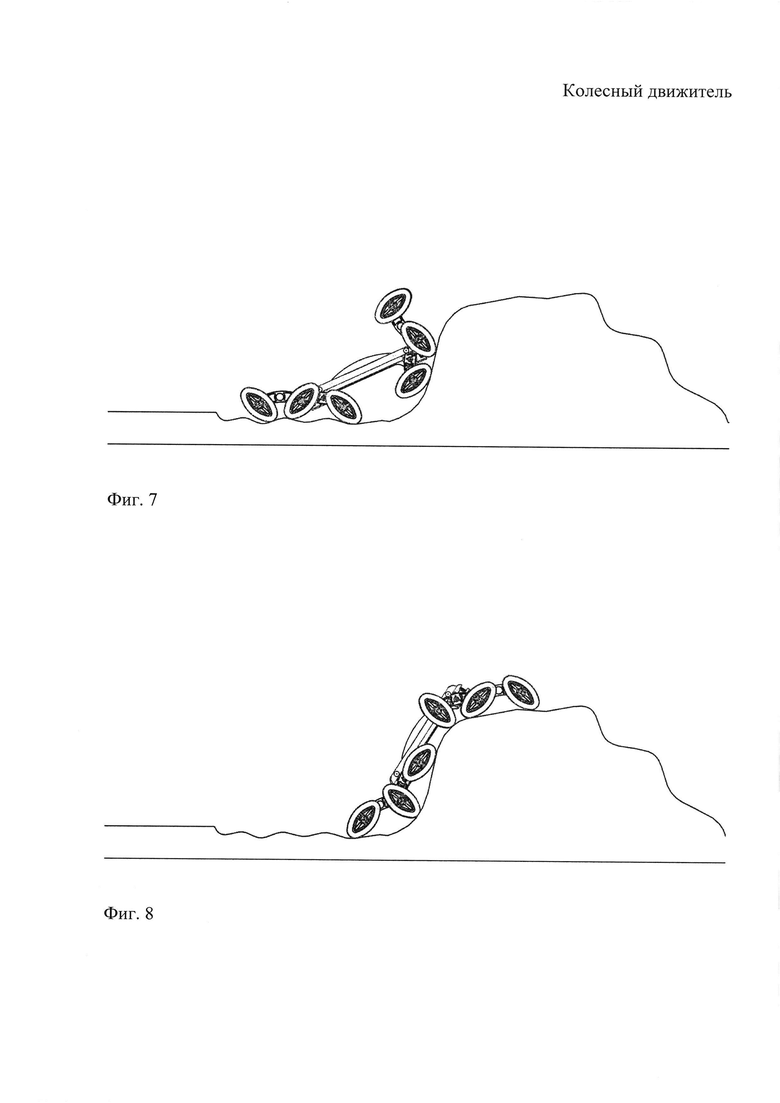
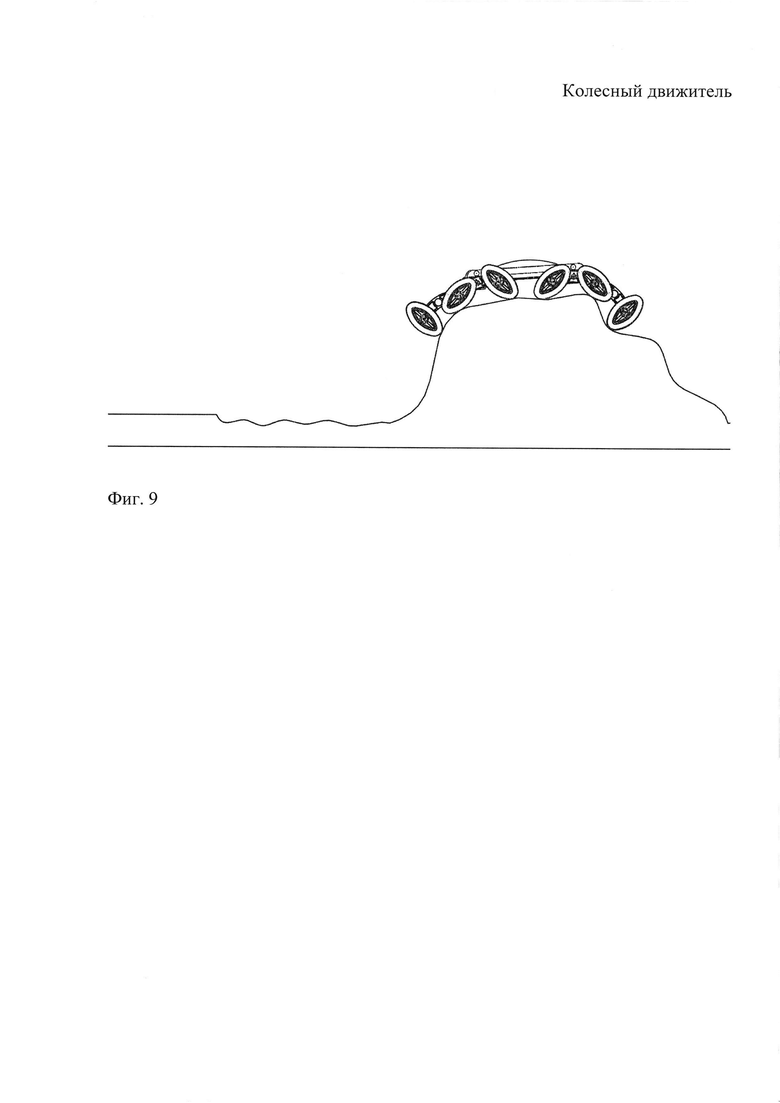
на фиг. 5-9 - фрагменты компьютерного моделирования движения колесного движителя.
Вариант исполнения предлагаемого колесного движителя представлен в виде модели, состоящей из платформы 1, снабженной с каждой стороны шестью эллипсоидными колесами 2 и приводами колес 3. По два эллипсоидных колеса 2 установлено на коромысла 4, шарнирно соединенные с платформой через ось 5, проходящую посередине между осями эллипсоидных колес 2, установленных на коромысло 4. Другие эллипсоидные колеса 2 установлены на рычаги 6, шарнирно связанные с коромыслом 4 осью 7. Эллипсоидные колеса 2, установленные на коромысла 4 и рычаги 6, расположены друг к другу взаимно перпендикулярно большими осями, и их вращение синхронизировано. Оси эллипсоидных колес 2, установленных на рычаги 6, выходят за пределы габаритов платформы 1. Коромысла 4 и рычаги 6 имеют возможность ограниченного поворота вокруг своих осей 5 и 7.
Колесный движитель работает следующим образом. Начало движения в любую сторону осуществляется приводами 3 эллипсоидных колес 2 путем изменения направления вращения. Повороты и развороты на месте производятся за счет изменения скорости вращения правых и левых эллипсоидных колес 2 или за счет их реверса - при развороте на месте. Регулировка скорости происходит в результате изменения числа оборотов привода 3.
Более подробно опишем кинематику движения колесного движителя по ровной поверхности и по пересеченной местности. Для большей наглядности в описании приведены фрагменты компьютерного моделирования движения колесного движителя по пересеченной местности (фиг. 5-9).
При движении колесного движителя платформа 1 не меняет положения своего центра тяжести. Это происходит потому, что одни эллипсоидные колеса 2 установлены на коромысла 4, которые шарнирно (ось 5) закреплены на платформе 1 с возможностью ограниченного поворота в вертикальной плоскости, а другие - на рычаги, также шарнирно (ось 7), и расположены по отношению друг к другу на коромыслах 4 и рычагах 6 так, что их большие оси эллипсов расположены друг к другу под 90 градусов и вращаются синхронно. Шарнирное (ось 7) закрепление рычага 6 на коромысле 4 позволяет эллипсоидному колесу 2, установленному на нем, легко наезжать на препятствия. При такой установке и вращении эллипсоидных колес 2 ось 5 не меняет своего положения по отношению к поверхности, по которой движется колесный движитель, и ее расстояние от этой поверхности постоянно и равно - h. В связи с этим вся платформа 1 не изменяет своего положения относительно грунта, или эти изменения сведены к минимуму.
При подходе к препятствию (фиг. 5-9) первым на него наезжает колесо 2, закрепленное на рычаге 6, оно с легкостью захватывает его благодаря своей эллипсоидной форме. При этом энергии тратится столько же, сколько и при движении на обычном колесе, так как неизменным остается положение центра тяжести платформы 1 при вращении эллипсоидных колес 2, но при этом происходит эффективный контакт с препятствием (фиг. 6-9) за счет эллипсоидной формы колеса 2. Колесный движитель, что наглядно видно на фиг. 8, 9, охватывает препятствие со всех сторон и эффективно преодолевает его. Кроме этого, при наезде на препятствие (фиг. 6, 7) не вся масса колесного движителя преодолевает его. Все происходит поэтапно, сначала заезжают эллипсоидные колеса 2, расположенные на рычагах 6, а затем последовательно остальные части колесного движителя. Сравнительный анализ обычного колеса, эквивалентного по длине окружности эллипсоидному колесу 2, показал, что при одинаковых условиях эксплуатации значительно более эффективным является эллипсоидное колесо 2, установленное вышеописанным образом. По сравнению с обычным колесным движителем предлагаемый колесный движитель более чем в два раза эффективнее при равных энергетических затратах на перемещение.
Наиболее важное применение предлагаемого колесного движителя - это работа в труднопроходимых местах - песчаные, болотистые и пересеченные местности, грунты с высоким снежным покровом, ледяные торосы и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО С КОЛЕСНО-ШАГАЮЩИМИ ДВИЖИТЕЛЯМИ М.И.ЛОВЧИКОВА | 1992 |
|
RU2031040C1 |
| Автопоезд для бездорожья | 1961 |
|
SU143668A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ | 2011 |
|
RU2483937C1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ ПОВЫШЕННОЙ ОПОРНОЙ И ГЕОМЕТРИЧЕСКОЙ ПРОХОДИМОСТИ | 2019 |
|
RU2705869C1 |
| СЪЕМНЫЙ ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2308396C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОДОЛЕНИЯ ПРЕПЯТСТВИЙ | 2014 |
|
RU2554270C1 |
| САМОХОДНОЕ ШАССИ ЧЕТЫРЕХКОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2494908C2 |
| САМОХОДНАЯ АМФИБИЙНАЯ ПЛАТФОРМА НА ВОЗДУШНОЙ ПОДУШКЕ | 2007 |
|
RU2345916C1 |
| КОЛЕСНЫЙ ДВИЖИТЕЛЬ | 2004 |
|
RU2280562C2 |
Изобретение относится к машиностроению и может быть использовано в транспорте в качестве колесного движителя для вездехода. Колесный движитель состоит из платформы, снабженной колесами и приводами колес. Колеса выполнены в виде эллипса. Одни эллипсоидные колеса установлены на коромысла, шарнирно соединенные с платформой через ось, проходящую посередине между осями колес, установленных на коромысло. Другие эллипсоидные колеса установлены на рычаги, шарнирно связанные с коромыслом. Эллипсоидные колеса, установленные на коромысла и рычаги, расположены друг к другу взаимно перпендикулярно большими осями, и их вращение синхронизировано. Оси эллипсоидных колес, установленных на рычаги, выходят за пределы габаритов платформы. Возможность свободного поворота коромысла и рычага на осях в вертикальной плоскости ограничена. Достигается расширение технических возможностей колесного движителя. 9 ил.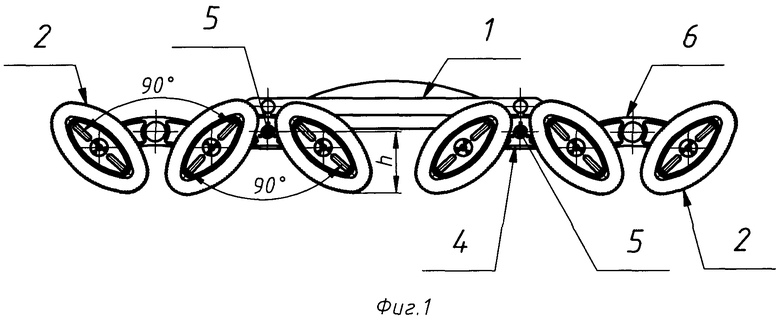
Колесный движитель, состоящий из платформы, снабженной колесами и приводами колес, отличающийся тем, что колеса выполнены в виде эллипса, одни эллипсоидные колеса установлены на коромысла, шарнирно соединенные с платформой через ось, проходящую посередине между осями колес, установленных на коромысло, а другие - на рычаги, шарнирно связанные с коромыслом, причем эллипсоидные колеса, установленные на коромысла и шарнирно соединенные с ними рычаги, расположены друг к другу взаимно перпендикулярно большими осями и их вращение синхронизировано, при этом оси эллипсоидных колес, установленных на рычаги, выходят за пределы габаритов платформы, кроме того, возможность свободного поворота коромысла и рычага на осях в вертикальной плоскости ограничена.
| ТРАНСПОРТНОЕ СРЕДСТВО С КОЛЕСНО-ШАГАЮЩИМИ ДВИЖИТЕЛЯМИ М.И.ЛОВЧИКОВА | 1992 |
|
RU2031040C1 |
| CN 101439737 A, 27.05.2009 | |||
| JP 2901949 B1, 07.06.1999 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2554900C2 |

