Назначение
Изобретение относится к области космической техники и может быть использовано на космических аппаратах (КА) для обеспечения ориентации на Солнце, в том числе, при нештатной работе КА.
Уровень техники
Управление КА в полете включает в себя, прежде всего, управление ориентацией КА для получения нужного положения корпуса КА относительно внешних ориентиров (управление вращательным движением КА вокруг центра масс).
После вывода КА на орбиту управление угловым положением с целью ориентации приборов КА на изучаемые объекты становится главным режимом полета (см. патент, РФ №2736522), поэтому важнейшей задачей современной космической техники является совершенствование системы ориентации, позволяющей в течение длительного времени определить с высокой точностью направления осей КА относительно осей некоторой системы координат, т.е. угловое положение КА, а также его угловую скорость.
Известен способ ориентации космического аппарата (патент, РФ, №2720577), включающий ориентацию космического аппарата относительно направления на Солнце и Землю с использованием бортового компьютера, связанного с системой определения угловых положений корпуса космического аппарата относительно осей ориентации и активного управления угловыми положениями, а также ориентацию космического аппарата с использованием дополнительного автономного контура управления, подключаемого к управлению при нарушении ориентации космического аппарата относительно направления на Солнце, с соответствующей установкой солнечных батарей в фиксированное положение относительно корпуса космического аппарата; после обеспечения ориентации космического аппарата относительно направления на Солнце в заданном диапазоне углов с использованием автономного контура управления по информации системы определения угловых положений корпуса аппарата относительно осей ориентации, включающей солнечный прибор, выставляют запрет на поиск космическим аппаратом Солнца, далее во время прохождения орбитального теневого участка при пропадании информации о наличии Солнца в поле зрения солнечного прибора включают таймер на время, равное максимальному времени прохождения орбитального теневого участка, при этом ориентацию космического аппарата относительно направления на Солнце во время прохождения орбитального теневого участка осуществляют с использованием измерителя угловых скоростей путем интегрирования угловых скоростей относительно осей ориентации космического аппарата, при появлении Солнца в поле зрения солнечного прибора таймер сбрасывают и управление ориентацией космического аппарата осуществляют по информации с солнечного прибора, а при срабатывании таймера снимают запрет на поиск космическим аппаратом Солнца.
Данный способ имеет следующие недостатки:
• при отказе солнечного прибора последует фатальное развитие аварийной ситуации, в связи с тем, что будет принудительный поиск Солнца даже при работающей системе ориентации, так как автономный контур управления является доминирующим;
• при отказе датчиков угловых скоростей (в бесплатформенной инерциальной системе, в которой (см. патент, РФ, №2669481) углы ориентации вычисляют измерением угловых скоростей и корректируют по показаниям датчиков положения), появится, например, постоянное смещение, которое может развернуть КА на угол, превышающий угол обзора солнечного прибора. Это может быть воспринято как "вход в тень", будет включен таймер и при работе "без Солнца" в режиме "гиропамяти" КА закрутится.
Известен способ ориентации космического аппарата (патент, РФ, №2736522), принятый за прототип изобретения, включающий ориентацию космического аппарата относительно направления на Солнце и Землю с использованием бортового компьютера по информации датчиков определения углового положения, ориентацию космического аппарата относительно направления на Солнце с использованием дополнительного автономного контура управления, подключаемого к управлению при нарушении ориентации космического аппарата относительно направления на Солнце, с соответствующей установкой солнечных батарей не жестко закрепленных с корпусом космического аппарата в фиксированное положение относительно корпуса космического аппарата, для солнечных батарей, панели которых жестко закреплены на корпусе космического аппарата, используют поворот корпуса космического аппарата в режиме «пассивной» закрутки для ориентации солнечных батарей на Солнце; по информации от бортового баллистического программного обеспечения бортового компьютера запускают генератор импульсных сигналов терминатора и при входе космического аппарата в "теневой" интервал орбиты запускают таймер, предусмотренный в блоке управления космического аппарата, с продолжительностью, равной максимальной продолжительности "теневого" интервала орбиты, от импульсного сигнала терминатора или по информации от исправного бортового баллистического программного обеспечения бортового компьютера; после выхода из "теневого" интервала орбиты при неисправном бортовом компьютере, по сигналу таймера космический аппарат переводят в режим работы с использованием автономного контура управления, а при исправном бортовом компьютере по информации от бортового баллистического программного обеспечения отключают таймер, и управление космического аппарата осуществляют по информации исправного бортового компьютера; при отрицательном энергобалансе системы электропитания, связанным с незапланированной потерей ориентации солнечных батарей космического аппарата на Солнце, используют экономичный режим работы аккумуляторных батарей системы электропитания.
В отличие от описанного выше аналога (патент, РФ, №2720577) в прототипе генератор импульсных сигналов терминатора, работающий в непрерывном генераторном режиме в течение всего срока активного существования КА, обеспечивает надежный запуск таймера при отсутствии информации от бортового баллистического программного обеспечения бортового компьютера.
Однако, в начале орбитального движения КА при первом его входе в "теневой" интервал орбиты есть вероятность, что в условиях воздействия на КА различных факторов космического пространства, например, локальных статических разрядов, воздействия тяжелых заряженных частиц или высокоэнергетических электронов и протонов, возможен временный сбой в работе бортового компьютера (например, «зависание») и запуск генератора импульсных сигналов терминатора не будет осуществлен. В результате не будет запуска таймера и информации об окончании теневого участка. В связи с этим последует развитие аварийной ситуация на КА, связанной с нарушением ориентации на Солнце, и как следствие, потеря работоспособности КА из-за нарушения энергобаланса. Ситуация усугубляется тем, что в начале орбитального движения КА при первом его входе в "теневой" интервал орбиты, аккумуляторная батарея системы электропитания может быть заряжена не в достаточной степени из-за расходования ее емкости на процессы успокоения и приведения КА после отделения его от ракеты-носителя или разгонного блока.
Кроме того, в прототипе отсутствует использование рациональных решений по повышению надежности способа ориентации КА и его живучести за счет обоснованного комплексного и совокупного использования резервирования, избыточности, мажоритирования и т.д. в составляющих управления ориентацией КА.
В соответствии с ГОСТ Р 56526-2015 надежность - это совокупность свойств, характеризующих способность КА обеспечивать в процессе функционирования получение заданного в техническом задании выходного эффекта при заданных условиях и режимах эксплуатации, а живучесть - способность составляющих управления ориентацией КА выполнять свои основные функции, несмотря на полученные повреждения.
Целью предлагаемого способа управления ориентацией космического аппарата является повышение надежности и живучести космического аппарата при его длительной автономной эксплуатации в космосе.
Раскрытие изобретения
Предлагаемый способ управления ориентацией космического аппарата заключается в том, что ориентируют космический аппарат относительно направления на Солнце и Землю с использованием бортового компьютера по информации датчиков определения углового положения, ориентируют космический аппарат относительно направления на Солнце с использованием дополнительного автономного контура управления, подключаемого к управлению при нарушении ориентации космического аппарата относительно направления на Солнце, с соответствующей установкой солнечных батарей не закрепленных жестко на корпусе космического аппарата в фиксированное положение относительно корпуса космического аппарата, при этом для солнечных батарей, панели которых зафиксированы на корпусе космического аппарата, используют поворот корпуса космического аппарата в режиме пассивной закрутки для их ориентации на Солнце; формируют импульсный сигнал терминатора путем запуска генератора импульсных сигналов терминатора по информации от бортового баллистического программного обеспечения бортового компьютера и при каждом входе космического аппарата в "теневой" интервал орбиты запускают таймер, предусмотренный в блоке управления космического аппарата, с продолжительностью, равной максимальной продолжительности "теневого" интервала орбиты, от импульсного сигнала терминатора или по информации от исправного бортового баллистического программного обеспечения бортового компьютера; после выхода из "теневого" интервала орбиты при неисправном бортовом компьютере, по сигналу таймера космический аппарат переводят в режим работы с использованием автономного контура управления, а при исправном бортовом компьютере по информации от бортового баллистического программного обеспечения отключают таймер, и управление космического аппарата осуществляют по информации исправного бортового компьютера.
Сущность изобретения заключается в том, что при первом входе в "теневой" интервал орбиты генератор импульсных сигналов терминатора может быть запущен не только по информации от исправного бортового баллистического программного обеспечения бортового компьютера, но также по сигналу от солнечного датчика или по сигналу с наземного комплекса управления; кроме того, использование дополнительного автономного контура управления в штатном режиме осуществляют на основании отсутствия управляющих сигналов, поступающих в него из бортового компьютера в течение устанавливаемого контрольного времени, а после восстановления работоспособности бортового компьютера по командам с наземного комплекса управления его включают в штатную работу и исключают дополнительный автономный контур управления из штатного режима управления космическим аппаратом; при этом, применяют комплексное мажоритирование, резервирование, избыточность ключевых элементов системы управления ориентацией космического аппарата.
Графические иллюстрации
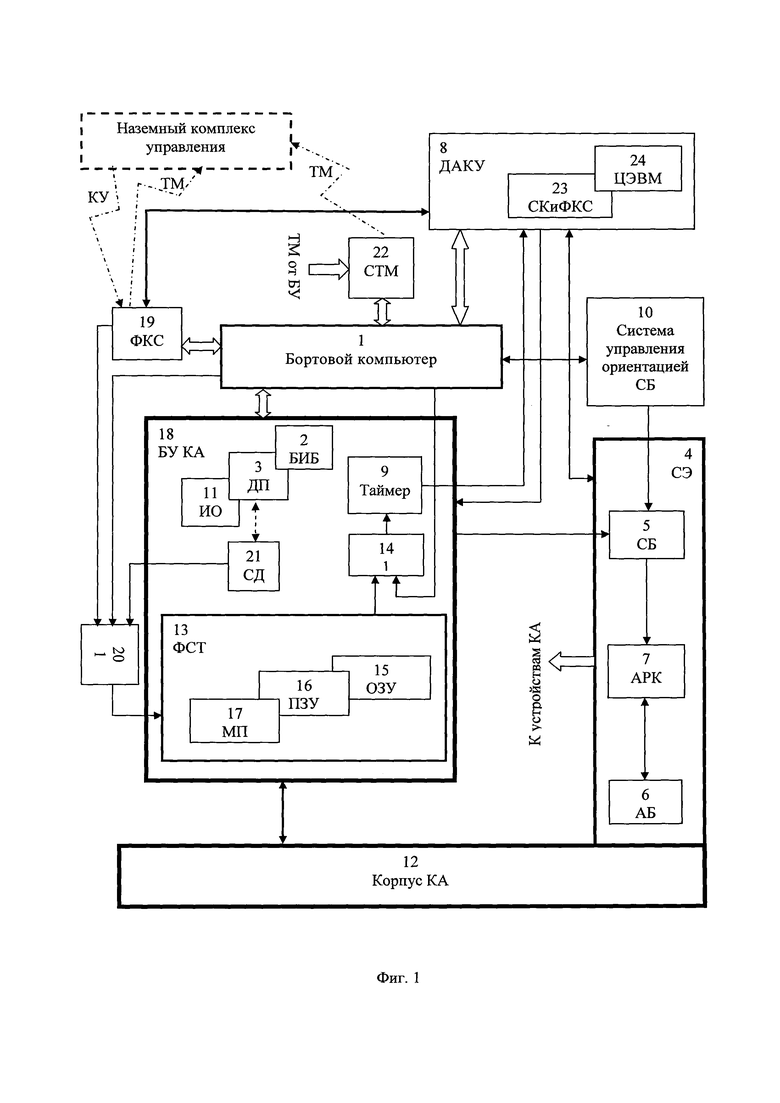
На приведенной графической фигуре приведен пример исполнения в виде структурной схемы для реализации заявляемого способа ориентации космического аппарата, содержащей составляющие, обозначенные позициями на фиг. 1:
- Бортовой компьютер (электронно-вычислительная машина) - 1;
- БИБ (бесплатформенный инерциальный блок) - 2;
- ДП (датчики положения КА относительно Солнца, Земли, звезд) - 3;
- СЭ (система электропитания) - 4;
- СБ (солнечные батареи) - 5;
- АБ (аккумуляторная батарея) - 6;
- АРК (аппаратура регулирования и контроля) - 7;
- ДАКУ (дополнительный автономный контур управления) - 8;
- Таймер - 9;
- Система управления ориентацией СБ (солнечных батарей) - 10;
- ИО (исполнительные органы) -11;
- Корпус К А - 12;
- ФСТ (формирователь сигнала терминатора) - 13;
- Элемент 2-ИЛИ - 14;
- ОЗУ (оперативное запоминающее устройство) - 15;
- ПЗУ (постоянное запоминающее устройство) - 16;
- МП (микропроцессор) - 17;
- БУ К А (блок управления космического аппарата) - 18;
- ФКС (формирователь командных сигналов) - 19;
- Элемент 3-ИЛИ - 20;
- СД (солнечный датчик) -21;
- СТМ (система телеметрической информации) - 22;
- СКиФКС (система контроля и формирования командных сигналов) - 23;
- ЦЭВМ (цифровая электронно-вычислительная машина) - 24;
- ТМ от БУ (телеметрическая информация от бортовых устройств).
В формирователь командных сигналов ФКС 19 с наземного комплекса управления по радиоканалу передают команды управления КУ (командно-программную информацию в составе рабочих программ и разовые команды), а с ФКС 19 и с системы телеметрической информации СТМ 22 в наземный комплекс управления по каналу телеметрии передают телеметрическую информацию (ТМ).
Описание примера исполнения
Начало управления КА в полете начинают по команде срабатывания датчиков отделения КА от ракеты-носителя или разгонного блока, когда включают бортовой компьютер 1, являющийся центральным управляющим звеном в управлении КА, и задействуют в работу программу управления КА.
При этом управление КА выполняют в соответствии с командами управления КУ с наземного комплекса управления на борт КА.
После отделения КА от ракеты или разгонного блока осуществляют процесс успокоения, затем с помощью БИБ 2, ДП 3 и ИО 11 блока управления БУ КА 18 (см. патент, РФ, №2722598) процесс приведения (совмещение осей связанной системы координат КА с осями орбитальной системы координат) и последующую стабилизацию КА. По окончании процесса успокоения и стабилизации КА для солнечных батарей, панели которых не жестко закреплены на корпусе КА, в автоматическом режиме системой управления ориентацией СБ 10, под действием приводных двигателей, находящихся в нем, солнечные батареи СБ 5 устанавливают в положение относительно корпуса КА 12 для получения максимально возможного в текущей точке орбиты КА значения тока, вырабатываемого СБ 5 (приближение к выполнению условия cosα=1=const, где α - угол между перпендикуляром к поверхности СБ 5 и направлением на Солнце).
Солнечные батареи СБ 5, у которых их панели жестко закреплены на корпусе в ряде современных КА, ориентируют на Солнце путем поворотов корпуса КА 12 блоком управления космического аппарата БУ КА 18 (БИБ 2, ДП 3 и ИО 11), в том числе и закрутки корпуса КА 12 вокруг направления на Солнце (режим «пассивной» закрутки с ориентацией СБ 5 на Солнце, т.е. режим солнечной ориентации). При этом каждый раз на время проведения целевой работы (например, проведения съемки) производят разворот корпуса КА 12 из режима солнечной ориентации в орбитальную ориентацию (например, продольная ось КА, совпадающая с продольной осью оптико-электронного модуля, направлена в надир при проведении съемки подспутниковой точки) и поддержание данной ориентации (режим активной ориентации), а затем по окончании целевой работы производят разворот корпуса К А 12 снова в режим «пассивной» закрутки с ориентацией СБ 5 на Солнце.
Примеры вариантов исполнения КА с исполнения с не жестко и жестко закрепленными солнечными батареями приведены в прототипе.
Радикальной защитой от аварийной ситуации на КА, связанной с временным сбоем бортового компьютера 1 и потерей ориентации на Солнце при движении КА на полетных "световых" интервалах орбиты, может быть автоматический переход с основного на резервный режим управления ориентацией КА относительно направления на Солнце, при этом использование бортового компьютера 1 временно прекращают и используют только резервный режим управления осуществляемый, цифровой электронно-вычислительной машиной ЦЭВМ 24 дополнительного автономного контура управления ДАКУ 8 по сигналу системы контроля и формирования командных сигналов СКиФКС 23.
Данный процесс осуществляют следующим образом. В бортовом компьютере 1 непрерывно формируют управляющие сигналы и передают их с заданными интервалами времени в СКиФКС 23, в котором осуществляют постоянный контроль за данными сигналами. Сбой в работе бортового компьютера 1, например, «зависание» в условиях воздействия на КА локальных статических разрядов, при котором в период его временного выхода из строя не могут формироваться команды управления, определяют по отсутствию управляющих сигналов в СКиФКС 23 из бортового компьютера 1 в течение устанавливаемого контрольного времени, и по команде СКиФКС 23 исключают бортовой компьютер 1 из контура управления КА, а в штатный режим включают ЦЭВМ 24.
Резервный режиме управления ориентацией КА относительно направления на Солнце не может обеспечить в полной мере функциональные возможности КА, но он гарантирует положительный энергобаланс, что обеспечивает живучесть КА. В резервном режиме управления ориентацией КА, как и в прототипе, дополнительным автономным контуром управления ДАКУ 8, устанавливают через систему управления ориентацией СБ 10 (для солнечных батарей, панели которых не жестко закреплены на корпусе КА 12) или через БИБ 2, ДП 3 и ИО 11 блока управления космического аппарата БУ КА 18 (для солнечных батарей, панели которых жестко закреплены на корпусе КА 12, режим «пассивной» закрутки с ориентацией СБ 5 на Солнце) солнечные батареи СБ 5 для получения максимальной их освещенности, а последующее возобновление ориентации КА с использованием бортового компьютера 1 осуществляют по радиокоманде (КУ) с наземного комплекса правления.
При движении КА на полетных "теневых" интервалах орбиты его электропитание осуществляется исключительно от аккумуляторных батарей АБ бив данном режиме наступает отрицательный энергобаланс. Параметры тени (время начала и окончания) для каждого витка рассчитывает бортовое баллистическое программное обеспечение бортового компьютера 1. Если при штатном функционировании КА во время прохождения "теневого" интервала орбиты произойдет сбой в работе бортового компьютера 1, то полностью перестанет функционировать все программное обеспечение, и не будет информации об окончании теневого участка. Следовательно, космический аппарат начнет терять ориентацию. А поскольку бортовой компьютер 1 неисправен, то по выходу из теневого участка КА не будет сформирован признак окончания теневого участка. В результате космический аппарат не сможет восстановить ориентацию панелей солнечных батарей на Солнце, что, в свою очередь, приведет к глубокому разряду АБ 6, развитию аварийной ситуации и возможному выходу из строя КА.
Поэтому в блоке управления космическим аппаратом БУ КА 18, как и в прототипе, предусмотрен таймер 9, с продолжительностью, равной максимальной продолжительности прохождения КА "теневого" интервала орбиты (продолжительность прохождения КА орбиты изменяется с изменением ее наклона, а также сезонных условий эксплуатации), который запускают по информации от бортового баллистического программного обеспечения при управлении КА с использованием исправного бортового компьютера 1 при каждом входе в "теневой" интервал орбиты. Однако, в случае неисправности бортового компьютера 1 в районе терминатора (граница "свет-тень"), при входе в "теневой" интервал орбиты таймер 9 не будет запущен и по выходу КА из "теневого" интервала орбиты не будет сформирован признак окончания "теневого" интервала.
Для запуска таймера 9 при входе в "теневой" интервал орбиты на выходе формирователя сигнала терминатора ФСТ 13 формируют импульсные сигналы терминатора в непрерывном генераторном режиме с периодом следования, равным длительности витка орбиты, которые в случае неисправности бортового компьютера 1 в районе терминатора обеспечивают запуск таймера 9 через элемент 2-ИЛИ 14.
Описание примера исполнения формирователя сигнала терминатора ФСТ 13, с использованием оперативного запоминающего устройства ОЗУ 15, постоянного запоминающего устройства ПЗУ 16 и микропроцессора МП 17 приведено в прототипе.
Таким образом, таймер 14 запускают сигналом с выхода элемента 2-ИЛИ 14, формируемого входными сигналами (сигналами логической "1"):
• по информации от бортового баллистического программного обеспечения при управлении КА с использованием исправного бортового компьютера 1;
ИЛИ
• по выходному сигналу ФСТ 13, работающего в непрерывном генераторном режиме в течение всего срока активного существования КА.
Автоматический запуск формирователя сигнала терминатора ФСТ 13 на борту КА в непрерывный генераторный режим в прототипе осуществляют по информации от бортового баллистического программного обеспечения с использованием бортового компьютера 1. Однако в начале орбитального движения КА при первом его входе в "теневой" интервал орбиты есть вероятность, что в условиях воздействия на КА различных факторов космического пространства, например, локальных статических разрядов, воздействия тяжелых заряженных частиц или высокоэнергетических электронов и протонов, возможен временный сбой в работе бортового компьютера 1 и запуск генератора импульсных сигналов ФСТ 13 в автоматическом режиме на борту КА не будет осуществлен. Следует отметить, что район терминатора характеризуется неблагоприятными воздействиями на КА, т.к. на поверхности КА может возникать значительный градиент потенциала из-за не выравнивания потенциалов освещенных и неосвещенных поверхностей КА. Происходит так называемая дифференциальная зарядка поверхности, которая может возникать также за счет различия вторично-эмиссионных характеристик материалов, находящихся на поверхности, различия условий попадания плазмы на отдельные участки поверхности и наличия конструктивных неоднородностей (см. Дорофеев Р.Ю. "Повышение энергоэффективности системы электропитания космического аппарата за счет использования энергии электростатического заряда поверхности космического аппарата в орбитальных условиях эксплуатации". «Российские космические системы», ул. Авиамоторная, 53, Москва, 111250, Россия e-mail: myhavkedah@mail.ru. Электронный журнал «Труды МАИ». Выпуск №68).
В результате отсутствия запуска таймера и информации об окончании теневого участка последует развитие аварийной ситуация на КА, связанной с нарушением ориентации на Солнце, и как следствие, потеря работоспособности КА из-за нарушения энергобаланса. Ситуация усугубляется тем, что в начале орбитального движения КА при первом его входе в "теневой" интервал орбиты, аккумуляторная батарея АБ 6 системы электропитания СЭ 4 может быть заряжена не в достаточной степени из-за расходования ее емкости на процессы успокоения и приведения КА после отделения его от ракеты-носителя или разгонного блока.
Для устранения данного недостатка прототипа в предлагаемом способе управления ориентацией космического аппарата автоматический запуск формирователя сигнала терминатора ФСТ 13 на борту КА в непрерывный генераторный режим осуществляют сигналом с выхода элемента 3-ИЛИ 20, формируемого входными сигналами по информации от бортового баллистического программного обеспечения с использованием бортового компьютера 1 или от солнечного датчика СД 21 (сигнал отсутствия воздействия Солнца при входе КА в "теневой" интервал орбиты). С учетом важности снижения габаритов и массы при проектировании КА и введения минимально необходимых технических устройств в качестве СД 21 целесообразно использовать солнечный датчик, используемый в ДП 3 (см. патент, РФ, №2669481). Кроме того, при автоматическом переходе с основного на резервный режим управления ориентацией КА относительно направления на Солнце и включении ЦЭВМ 24 в штатный режим, в СКиФКС 23 формируют команду "управление ориентацией КА дополнительным автономным контуром управления ДАКУ 8", которую из ФКС 19 по телеметрии передают в наземный комплекс управления. По данной команде в наземном комплексе управления формируют команду управления (КУ) "вход в теневой интервал орбиты", которую передают по радиоканалу в ФКС 19 при нахождении КА в районе терминатора и вхождении его в "теневой" интервал орбиты. Данный сигнал из ФКС 19 подают на вход элемента 3-ИЛИ 20, формируя тем самым на выходе элемента 3-ИЛИ 20 сигнал запуска формирователя сигнала терминатора ФСТ 13 в непрерывный генераторный режим.
В качестве элемента 3-ИЛИ 20 можно использовать микросхему 564ЛЕ10.
Таким образом, формирователь сигнала терминатора ФСТ 13 запускают сигналом с выхода элемента 3-ИЛИ 20, формируемого входными сигналами (сигналами логической "1"):
• по информации от бортового баллистического программного обеспечения при управлении КА с использованием исправного бортового компьютера 1;
ИЛИ
• от солнечного датчика СД 21;
ИЛИ
• по КУ "вход в теневой интервал орбиты" с наземного комплекса управления; надежно обеспечивая, тем самым, запуск формирователя сигнала терминатора ФСТ 13 в непрерывный генераторный режим, т.к. практически исключается одновременное отсутствие входных сигналов на входах элемента 3-ИЛИ 20.
Поэтому в дальнейшем, в течение всего срока эксплуатации КА, таймер 9 будет надежно запускаться, в том числе и при неисправном бортовом компьютере 1 (при отсутствии сигнала бортового баллистического программного обеспечения) в районе терминатора. При этом, в процессе эксплуатации КА периодически, в том числе, с учетом наклона орбиты и сезонных условий, период следования импульсных сигналов на выходе ФСТ 13 корректируют по информации от бортового баллистического программного обеспечения с использованием сигнала исправного бортового компьютера 1, поступающего в ФСТ 13 (выбором соответствующей временной уставки ПЗУ 16), обеспечивая, при этом, синхронизацию сигнала ФСТ 13 в районе терминатора (граница "свет-тень") с сигналом бортового компьютера 1 (переходными процессами формирования сигнала в ФСТ 13 можно пренебречь).
Для повышения надежности и живучести системы электропитания СЭ 4 КА из-за возникающих ситуаций, связанных с незапланированной потерей ориентации СБ 5 на Солнце, аппаратурой регулирования и контроля АРК 7 используют экономичный режим работы аккумуляторных батарей (см. патент, РФ, №2706762).
Кроме того, повышение надежности способа ориентации космического аппарата и его живучести обеспечивают за счет обоснованного комплексного и совокупного использования мажоритирования, резервирования, избыточности ключевых элементов системы управления ориентацией космического аппарата, например, микроЭВМ бесплатформенного инерциального блока БИБ 2 выполняют в виде мажоритированной трехканальной структуры, устройства электромагнитной системы исполнительных органов ИО 11 выполняют по схеме резервирования, а двигатели-маховики исполнительных органов ИО 11, блок датчиков угловой скорости бесплатформенного инерциального блока БИБ 2 выполняют по избыточной системе (см. примеры исполнения и описание в патенте, РФ, №2722598).
Таким образом, заявленное изобретение позволяет:
• надежно обеспечить эффективную ориентацию панелей солнечных батарей относительно направления на Солнце в течение всего срока активного существования космического аппарата;
• при отрицательном энергобалансе системы электропитания, связанным с незапланированной потерей ориентации солнечных батарей космического аппарата на Солнце, использовать экономичный режим работы аккумуляторных батарей системы электропитания;
• использовать обоснованное комплексное мажоритирование, резервирование и избыточность,
и тем самым обеспечить высокую надежность и живучесть космического аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2020 |
|
RU2736522C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2706743C1 |
| Способ ориентации космического аппарата | 2019 |
|
RU2720577C1 |
| СПОСОБ ОРИЕНТАЦИИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2013 |
|
RU2544021C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ВЫПОЛНЕНИИ ЭКСПЕРИМЕНТОВ НА ОРБИТАХ С МАКСИМАЛЬНОЙ ДЛИТЕЛЬНОСТЬЮ ТЕНЕВОГО УЧАСТКА | 2014 |
|
RU2562903C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2574922C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ СОЛНЕЧНОЙ БАТАРЕИ НИЗКООРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА ПО ВЫРАБАТЫВАЕМОМУ ТОКУ | 2014 |
|
RU2578416C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2524696C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ВЫПОЛНЕНИИ ЭКСПЕРИМЕНТОВ НА ОРБИТАХ С МАКСИМАЛЬНОЙ ДЛИТЕЛЬНОСТЬЮ ТЕНЕВОГО УЧАСТКА | 2010 |
|
RU2457158C2 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ИМЕЮЩИМИ ОДНУ СТЕПЕНЬ СВОБОДЫ СОЛНЕЧНЫМИ БАТАРЕЯМИ | 2018 |
|
RU2684241C1 |
Изобретение относится к космической технике и может быть использовано на космических аппаратах (КА) для обеспечения ориентации на Солнце. Способ ориентации КА обеспечивает ориентацию КА относительно направления на Солнце с использованием дополнительного автономного контура управления. Используется контроль временного теневого интервала орбиты с помощью таймера, запускаемого импульсным сигналом терминатора или по информации от бортового баллистического программного обеспечения бортового компьютера. При первом входе в теневой интервал орбиты генератор импульсных сигналов терминатора может быть запущен не только по информации от исправного бортового баллистического программного обеспечения бортового компьютера, но также по сигналу от солнечного датчика или по сигналу с наземного комплекса управления (НКУ). Использование дополнительного автономного контура управления в штатном режиме осуществляют в случае отсутствия управляющих сигналов, поступающих в него из бортового компьютера в течение устанавливаемого контрольного времени. После восстановления работоспособности бортового компьютера по командам с НКУ его включают в штатную работу и исключают дополнительный автономный контур управления из штатного режима управления КА. Техническим результатом изобретения является повышение надежности и живучести КА. 1 ил.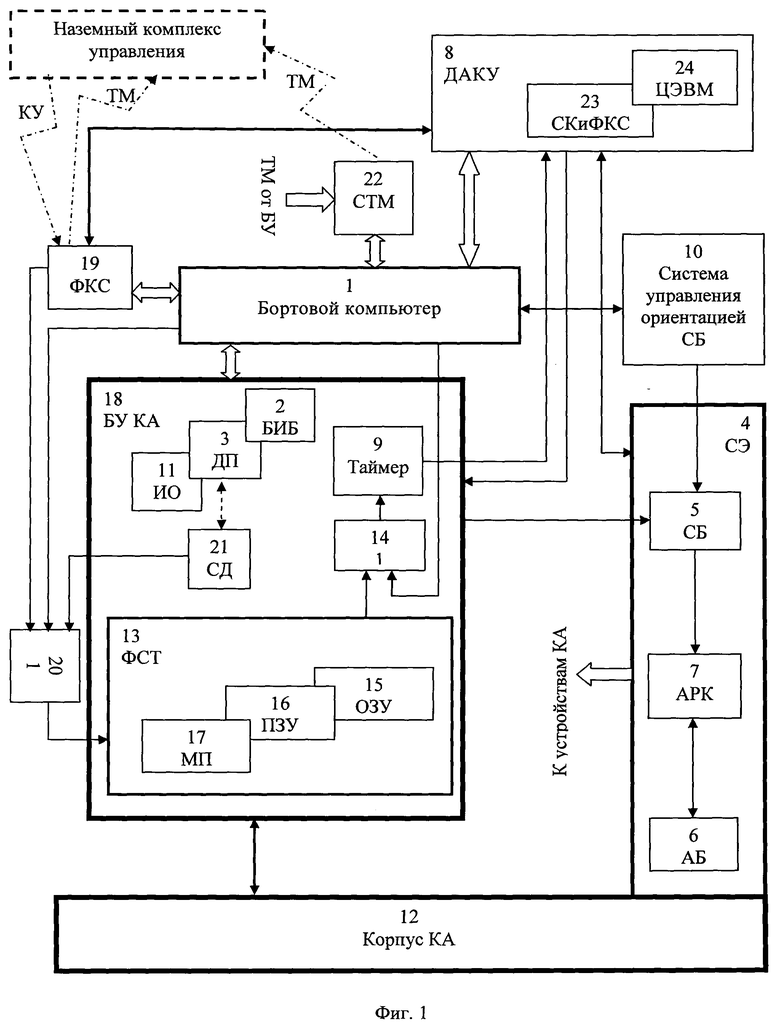
Способ управления ориентацией космического аппарата, включающий ориентацию космического аппарата относительно направления на Солнце и Землю с использованием бортового компьютера по информации датчиков определения углового положения, ориентацию космического аппарата относительно направления на Солнце с использованием дополнительного автономного контура управления, подключаемого к управлению при нарушении ориентации космического аппарата относительно направления на Солнце, с соответствующей установкой солнечных батарей, не закрепленных жестко на корпусе космического аппарата, в фиксированное положение относительно корпуса космического аппарата, при этом для солнечных батарей, панели которых зафиксированы на корпусе космического аппарата, используют поворот корпуса космического аппарата в режиме пассивной закрутки для их ориентации на Солнце; формируют импульсный сигнал терминатора путем запуска генератора импульсных сигналов терминатора по информации от бортового баллистического программного обеспечения бортового компьютера, и при каждом входе космического аппарата в теневой интервал орбиты запускают таймер, предусмотренный в блоке управления космического аппарата, с продолжительностью, равной максимальной продолжительности теневого интервала орбиты, от импульсного сигнала терминатора или по информации от исправного бортового баллистического программного обеспечения бортового компьютера; а после выхода из теневого интервала орбиты при неисправном бортовом компьютере по сигналу таймера космический аппарат переводят в режим работы с использованием автономного контура управления, при исправном бортовом компьютере по информации от бортового баллистического программного обеспечения отключают таймер, и управление космического аппарата осуществляют по информации исправного бортового компьютера, отличающийся тем, что при первом входе в теневой интервал орбиты генератор импульсных сигналов терминатора запускают не только по информации от исправного бортового баллистического программного обеспечения бортового компьютера, но также по сигналу от солнечного датчика или по сигналу с наземного комплекса управления; кроме того, использование дополнительного автономного контура управления в штатном режиме осуществляют на основании отсутствия управляющих сигналов, поступающих в него из бортового компьютера в течение устанавливаемого контрольного времени, а после восстановления работоспособности бортового компьютера по командам с наземного комплекса управления его включают в штатную работу и исключают дополнительный автономный контур управления из штатного режима управления космическим аппаратом; при этом применяют комплексное мажоритирование, резервирование, избыточность ключевых элементов системы управления ориентацией космического аппарата.
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2020 |
|
RU2736522C1 |
| Способ ориентации космического аппарата | 2019 |
|
RU2720577C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА, СНАБЖЕННОГО БОРТОВЫМ РАДИОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2001 |
|
RU2191721C1 |
| СПОСОБ ОРИЕНТАЦИИ ОСЕЙ КОСМИЧЕСКОГО АППАРАТА В ОРБИТАЛЬНУЮ СИСТЕМУ КООРДИНАТ | 2009 |
|
RU2396189C1 |
| US 6381520 B1, 30.04.2002. | |||

