Изобретение относится к области приборостроения, в частности к гироскопии, и может быть использовано в системах управления.
Существуют три основных режима работы твердотельного волнового гироскопа: режим датчика угловой скорости; режим свободной волны; режим параметрического поддержания колебаний.
В режиме датчика угловой скорости осуществляется коррекция параметров импульсов возбуждения и поддержания колебаний оболочки резонатора для постоянного приведения плоскости колебаний стоячей волны к плоскости основного колебания, вызванного вращением твердотельного волнового гироскопа. Угловая скорость определяется по энергии приведения плоскости колебаний оболочки резонатора в исходное положение. Максимальное значение измеряемой угловой скорости ограничивается временными затратами на преодоление инерционных свойств оболочки резонатора.
В режиме свободной волны, в отличие от режима датчика угловой скорости, угол поворота плоскости колебаний оболочки резонатора пропорционален углу поворота твердотельного волнового гироскопа и в исходное положение не приводится. При этом сохраняется измерительная информации об угле поворота и отсутствуют временные затраты на приведение плоскости колебаний в исходное положение. Для поддержания колебаний оболочки резонатора в текущем угловом положении плоскости колебаний и исключения приведения плоскости колебаний к исходному положению с определенной погрешностью формируется вектор возбуждающей силы с углом поворота равным углу поворота плоскости колебаний. Максимальное значение измеряемой угловой скорости ограничивается временем, необходимым на математическую обработку измерительных сигналов и формирование вектора возбуждающей силы. Также, в данном режиме появляется дополнительная погрешность из-за ошибок формирования вектора возбуждающей силы для поддержания колебаний.
В режиме параметрического поддержания колебаний действие возбуждающей силы происходит на удвоенной частоте резонанса одновременно по всей окружности резонатора, при этом отсутствует преобладающее силовое воздействие, вызывающее прецессию плоскости колебаний, по какому-либо азимуту относительно исходного положения, на резонаторе. Поэтому поддерживаются колебания резонатора в той плоскости, угол которой относительно исходного положения определен угловым вращением корпуса датчика.
С использованием режима параметрического поддержания колебаний снижаются временные затраты на вычисление углового положения и угловой скорости по следующим причинам:
- не требуется приведения плоскости колебаний к первоначальному положению и, соответственно, преодоление инерционных свойств стоячей волны колебаний;
- не требуется вычисление вектора возбуждающей силы, как в режиме свободной волны.
Следовательно, угловое положение и угловая скорость вычисляются практически сразу, требуется только учесть систематическую погрешность. При этом возможно выполнять измерения угла поворота и угловой скорости при максимальной угловой скорости вращения твердотельного волнового гироскопа превышающей 1000°/сек.
Известен вибрационный цилиндрический гироскоп, описанный в изобретении под названием «Вибрационный цилиндрический гироскоп и способ измерения» [патент США №4793195, МПК4 G01C 19/28, G01C 19/50, опубликован 27.12.1988 г.], содержащий герметичный корпус, состоящий из кожуха и основания с выводами, во внутренней полости которого установлен центрирующим элемент, обеспечивающий соосное расположение резонатора, емкостной системы регистрации колебаний оболочки резонатора и электромагнитной системы возбуждения и полдержания колебаний оболочки резонатора.
Данное устройство принимается за прототип как наиболее близкое по технической сущности к заявляемому.
Недостатком известного гироскопа является то, что сердечник многополюсного электромагнита по форме представляет собой кольцо из электромагнитной стали заданной толщины, концентричное оболочке резонатора, с вытянутыми на нем в сторону оболочки резонатора равномерно расположенными стержнями полюсов чередующейся полярности, определяемой направлением обмоток катушек, расположенных на них. Это позволяет гироскопу работать только в режиме позиционного возбуждения колебаний.
В режиме измерения угловой скорости недостатком работы известного гироскопа является низкое значение максимально измеряемой угловой скорости (не более 15-20°/с), вызванное необходимостью преодоления инерционных свойств стоячей волны в оболочке резонатора.
В режиме свободной волны (т.е. слежения за угловым положением плоскости колебаний) недостатками являются:
- сложный алгоритм формирования вектора результирующей силы, совпадающего с плоскостью колебаний резонатора:
- длительное время вычисления по данному алгоритму, что ограничивает максимальную измеряемую скорость вращения;
- дополнительные погрешности измерения угловою положения, вызванные погрешностью вычисления результирующею силового вектора возбуждения колебаний;
- отсутствие параметрического режима работы, что ограничивает измерение углового положения объекта в диапазоне больших угловых скоростей вращения.
Задачей, на решение которой направлено заявляемое изобретение, является повышение точности и сокращение времени измерений.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в обеспечении работы твердотельного волнового гироскопа в режиме параметрического поддержания колебаний резонатора для измерения угловых скоростей и углов поворота при максимальной угловой скорости вращения, превышающей 1000°/с за счет формирования по окружности расположения полюсов электромагнитов равномерной магнитной индукции, обеспечивающей при недеформированной оболочке резонатора равномерное по окружности силовое воздействие электромагнитов.
Указанный технический результат достигается тем, что твердотельный волновой гироскоп содержит герметичный корпус, состоящий из кожуха и основания с выводами, во внутренней полости которого установлен центрирующий элемент, обеспечивающий соосное расположение резонатора, емкостной системы регистрации колебаний оболочки резонатора и электромагнитной системы возбуждения и поддержания колебаний оболочки резонатора, согласно изобретению электромагнитная система возбуждения и поддержания колебаний оболочки резонатора выполнена в виде блока равномерно расположенных по окружности оболочки резонатора электромагнитов, сердечники которых имеют П-образную форму, причем плоскость симметрии каждого электромагнита, проходящая через полюса, параллельна оси симметрии резонатора и проходит через нее.
Выполнение твердотельного волнового гироскопа в виде герметичного корпуса, состоящего из кожуха и основания с выводами, во внутренней полости которого установлен центрирующий элемент, обеспечивающий соосное расположение резонатора, емкостной системы регистрации колебаний оболочки резонатора и электромагнитной системы возбуждения и поддержания колебаний оболочки резонатора, выполненной в виде блока равномерно расположенных по окружности оболочки резонатора электромагнитов, сердечники которых имеют П-образную форму, причем плоскость симметрии каждого электромагнита, проходящая через полюса, параллельна оси симметрии резонатора и проходит через нее, позволяет обеспечить формирование по окружности расположения полюсов электромагнитов равномерной магнитной индукции, обеспечивающей при недеформированной оболочке резонатора равномерное по окружности силовое воздействие электромагнитов.
Наличие в заявляемом изобретении признаков, отличающих его от прототипа, позволяет считать его соответствующим условию «новизна».
Новые признаки, которые содержит отличительная часть формулы изобретения, не выявлены в технических решениях аналогичного назначения. На этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
Изобретение иллюстрируется чертежами
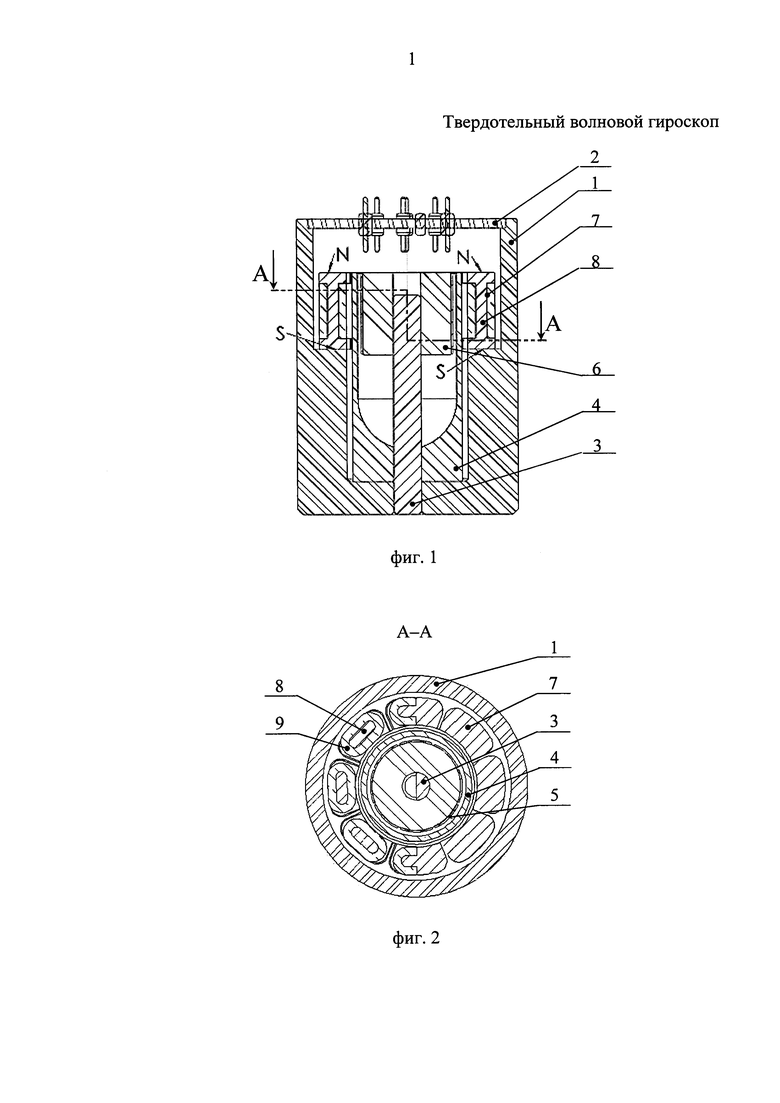
фиг. 1 представляет продольный разрез твердотельного волнового гироскопа;
фиг. 2 - поперечный разрез Α-A фиг. 1, конструкция магнитной системы;
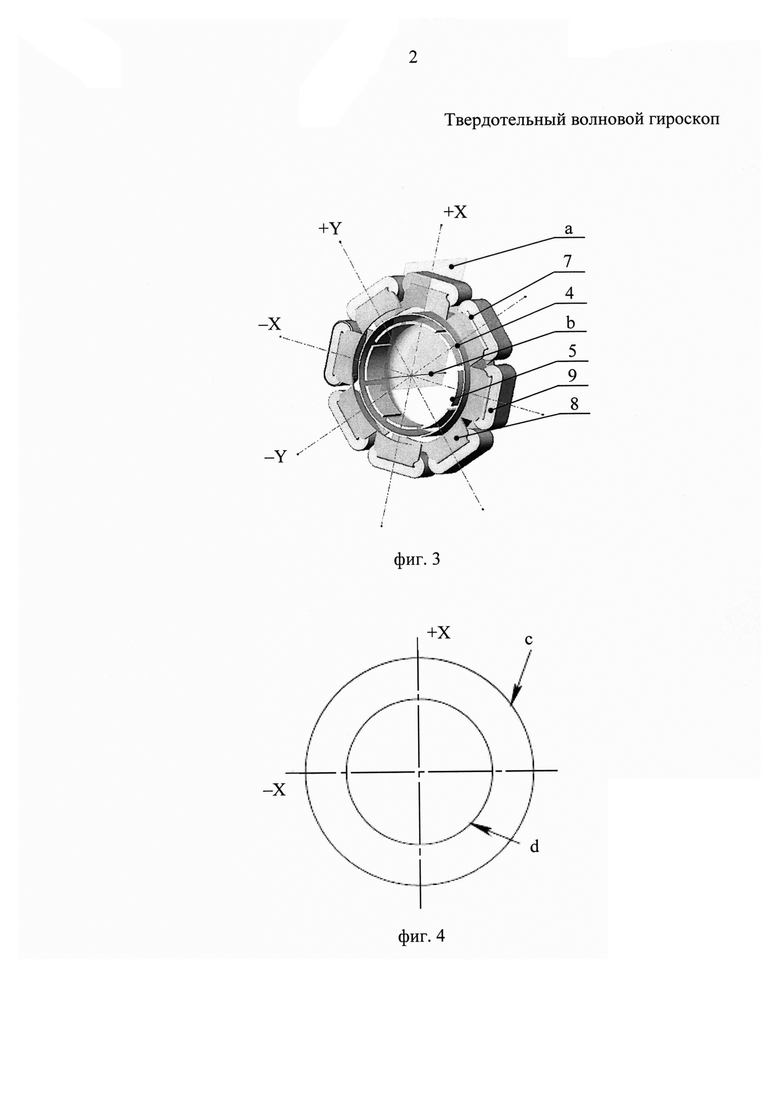
фиг. 3 - схема расположения электромагнитов по осям +Х, -X, +Y, -Y (где а - плоскость симметрии электромагнита; b - ось симметрии);
фиг. 4 - схема исходного состояния оболочки резонатора (где c - расположение поверхностей полюсов электромагнитов; d - оболочка резонатора);
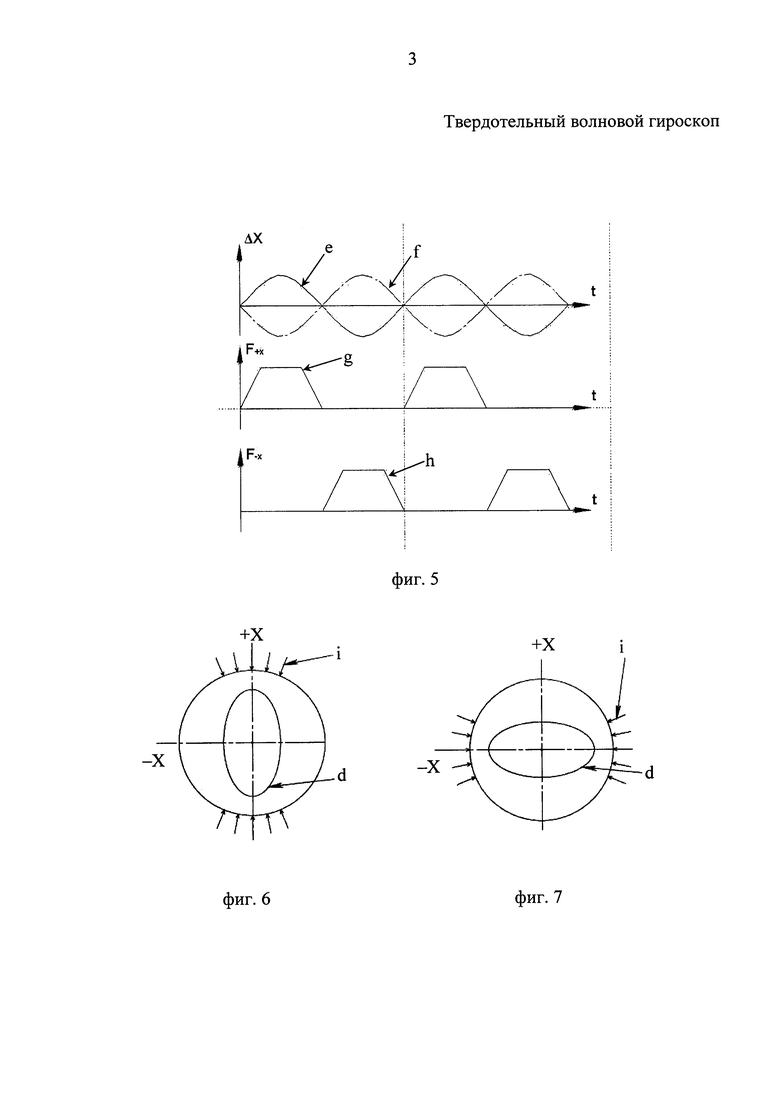
фиг. 5 - эпюры силовых воздействий и отклонений от окружности оболочки резонатора при колебаниях (где е - эпюра колебаний оболочки резонатора по оси +Х: f - эпюра колебаний оболочки резонатора по оси - X; g - эпюры силовых воздействий по оси +X; h - эпюры силовых воздействий по оси -X);
фиг. 6 - схема деформаций оболочки резонатора под действием вдоль оси +Х магнитной силы электромагнитов в режиме позиционного возбуждения колебаний (где d - оболочка резонатора; i - магнитная индукция на поверхности полюсов электромагнитов);
фиг. 7 - схема деформаций оболочки резонатора под действием вдоль оси -X магнитной силы электромагнитов, в режиме позиционного возбуждения колебаний (где d - оболочка резонатора; i - магнитная индукция на поверхности полюсов электромагнитов);
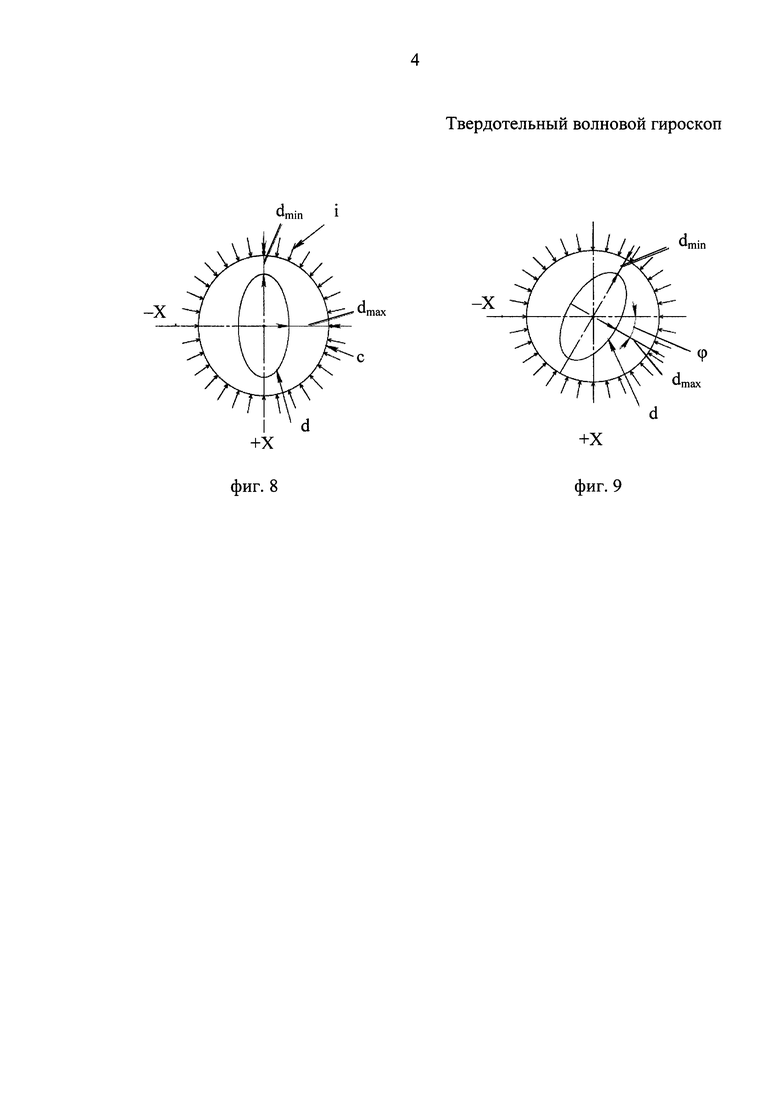
фиг. 8 - схема деформаций оболочки резонатора под действием равномерно подаваемой по окружности магнитной силы в исходном положении (где с - расположение поверхностей полюсов электромагнитов; d - оболочка резонатора; i - магнитная индукция на поверхности полюсов электромагнитов; dmin - минимальное расстояние от поверхности полюсов электромагнитов до деформированной оболочки резонатора; dmax - максимальное расстояние от поверхности полюсов электромагнитов до деформированной оболочки резонатора);
фиг. 9 - схема деформаций оболочки резонатора под действием равномерно подаваемой по окружности магнитной силы при повороте гироскопа (где с - расположение поверхностей полюсов электромагнитов; d -оболочка резонатора; i - магнитная индукция на поверхности полюсов электромагнитов; dmin - минимальное расстояние от поверхности полюсов электромагнитов до деформированной оболочки резонатора; dmax - максимальное расстояние от поверхности полюсов электромагнитов до деформированной оболочки резонатора; ϕ - геометрический угол поворота плоскости колебаний оболочки резонатора).
Твердотельный волновой гироскоп содержит герметичный корпус, состоящий из кожуха 1 и основания 2 с выводами. Во внутренней полости корпуса установлен центрирующий элемент 3, обеспечивающий соосное расположение резонатора 4 емкостной системы регистрации колебаний оболочки резонатора и электромагнитной системы возбуждения и поддержания колебаний оболочки резонатора.
Емкостная система регистрации колебаний оболочки резонатора состоит из электродов 5, расположенных на основании 6, и установлена во внутренней полости резонатора 4.
Электромагнитная система возбуждения и поддержания колебаний оболочки резонатора расположена со стороны внешней боковой поверхности резонатора 4 напротив емкостной системы регистрации колебаний оболочки резонатора и состоит из электромагнитов 7, выполненных в виде П-образных сердечников 8 с обмотками 9 (фиг. 1-3).
Электромагниты 6 расположены попарно друг против друга, при этом плоскость симметрии каждой пары электромагнитов 7 совпадает с одной из осей +Х, -Χ, +Y, -Y. Ортогональные оси +Х и -X совпадают с плоскостью основных колебаний оболочки резонатора, а ортогональные оси +Y и -Y - с плоскостью квадратурных колебаний оболочки резонатора, причем угол между осями +Х и +Y и соответственно осями -X и -Y равен 45° (фиг. 3).
Форма полюсов электромагнитов 7 и одностороннее расположение одноименных полюсов по окружности оболочки резонатора 4 обеспечивают работу твердотельного волнового гироскопа в режиме параметрического поддержания колебаний за счет поддержания амплитуды колебаний твердотельного волнового гироскопа формированием равномерного по окружности недеформированной оболочки резонатора 4 силового воздействия электромагнитов 7.
Также твердотельный волновой гироскоп оснащен электронным блоком управления, расположенным за пределами корпуса (не показано). Электронный блок управления обеспечивает формирование импульсов, поступающих на обмотки электромагнитов 7, с требуемыми параметрами для возбуждения и поддержания колебаний оболочки резонатора 4, определение условий переключения режимов работы (позиционный или параметрический режим), снятие с электродов 5 емкостной системы регистрации измерительных сигналов, преобразование их в цифровой код и последующее вычисление углового положения и угловой скорости.
Работа твердотельного волнового гироскопа осуществляется следующим образом.
В исходном состоянии при отсутствии магнитных сил электромагнитов 7 оболочка резонатора 4 не деформирована и представляет собой окружность (фиг. 4).
Начальное возбуждение основных колебаний оболочки резонатора 4 осуществляется в режиме позиционного возбуждения колебаний электромагнитами 7, расположенными по осям +Х и -X, с частотой свободных колебаний оболочки резонатора 4. При воздействии магнитных сил вдоль оси +Х или -X оболочка резонатора 4 деформируется относительно электромагнитов 6, расположенных на одной из этих осей (фиг. 5, 6, 7).
Возбуждение колебаний в позиционном режиме обеспечивает задание начального угла плоскости колебаний оболочки резонатора 4, относительно которого производят дальнейшие измерения утла поворота. Плоскость колебаний оболочки резонатора 4 совпадает с большой осью деформированной оболочки резонатора 4 при воздействии магнитной силы вдоль оси +Х. Снятие информации о параметрах колебаний оболочки резонатора 4 производят с электродов 5. По параметрам колебаний вычисляют амплитуды основных и квадратурных колебании оболочки резонатора 4, а также угол поворота основных колебаний.
Если амплитуда квадратурных колебаний оболочки резонатора 4 превышает максимальный уровень, производят их подавление корректировкой соответствующих параметров импульсов на обмотках 9 электромагнитов 7, расположенных по осям +Y и -Y. При достижении определенной амплитуды основных колебаний оболочки резонатора 4, необходимой для режима параметрического поддержания колебаний, производят переключение в данный режим.
В режиме параметрического поддержания колебаний формируется равномерная по окружности магнитная индукция одновременным включением в одном направлении электромагнитов 6 на удвоенной частоте резонанса, при этом магнитная сила электромагнитов 6 пропорциональна магнитной индукции формируемого поля:
F=k*Bob,
где F - магнитная сила, воздействующая на оболочку резонатора;
k - коэффициент пропорциональности, определяемый конструктивными особенностями магнитной системы;
Bob - магнитная индукция па поверхности оболочки резонатора, соответственно отсутствует преобладающее значение магнитной индукции по любому азимуту окружности оболочки резонатора 3.
Магнитная индукция на поверхности оболочки резонатора 3 пропорциональна магнитной индукции на поверхности полюсов электромагнитов 6 и обратно пропорциональна квадрату расстояния от оболочки резонатора 3 до поверхности полюсов электромагнитов 6. При этом силовое воздействие на оболочку резонатора 3 после перехода в режим параметрического поддержания колебаний на минимальном расстоянии dmin вдоль большой оси деформирования оболочки резонатора 3 превышает силовое воздействие на максимальном расстоянии dmax вдоль малой оси деформирования оболочки резонатора 3 на значение ΔF, равное:
ΔF=k*Bpol*(1/(dmax*dmin)2)*(dmax2-dmin2)
где k - коэффициент пропорциональности, определяемый конструктивными особенностями магнитной системы;
Bpol - магнитная индукция на поверхности полюсов электромагнитов;
dmax - максимальное расстояние от поверхности полюсов электромагнитов до деформированной оболочки резонатора;
dmin - минимальное расстояние от поверхности полюсов электромагнитов до деформированной оболочки резонатора (фиг. 8).
Поэтому поддержание колебаний стоячей волны оболочки резонатора 3 будет происходить в том угловом положении большой оси деформированной оболочки резонатора 3 и, следовательно, плоскости колебаний относительно исходного положения твердотельного волнового гироскопа, который определяется угловым вращением датчика (фиг. 9).
Таким образом, формирование равномерного и непрерывного по окружности недеформированной оболочки резонатора силового воздействия осуществляется расположением всех поверхностей полюсов электромагнитов 7 на эквидистантной поверхности, образующей сплошное кольцо, к осссимметричной оболочке резонатора 4, причем форма полюсов электромагнитов 7 компенсирует краевые эффекты между соседними электромагнитами 7.
Применение заявленного твердотельного волнового гироскопа позволяет реализовать измерение углового вращения с рабочим диапазоном угловых скоростей более 1000% в режиме параметрического поддержания колебаний при электромагнитном возбуждении и поддержании колебаний оболочки резонатора.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании заявленного изобретения следующей совокупности условий:
- твердотельный волновой гироскоп, воплощающий заявленное изобретение при его осуществлении, предназначен для использования в приборостроении, в частности гироскопии, а также в системах управления;
- для заявленного устройства в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления;
- твердотельный волновой гироскоп, воплощающий заявленное изобретение при осуществлении, способен обеспечить формирование по окружности расположения полюсов электромагнитов равномерной магнитной индукции, обеспечивающей при недеформированной оболочке резонатора равномерное по окружности силовое воздействие электромагнитов.
Следовательно, заявленное изобретение соответствует условию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ В ЧУВСТВИТЕЛЬНОМ ЭЛЕМЕНТЕ ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518632C2 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2008 |
|
RU2362975C1 |
| МАЛОГАБАРИТНЫЙ ТВЕРДОТЕЛЫЙ ВОЛНОВОЙ ГИРОСКОП | 2007 |
|
RU2362121C2 |
| ИНТЕГРИРУЮЩИЙ МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2005 |
|
RU2296300C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2013 |
|
RU2541711C1 |
| Пространственный интегрирующий твердотельный волновой гироскоп | 2020 |
|
RU2763688C1 |
| Способ считывания и управления колебаниями волнового твердотельного гироскопа | 2018 |
|
RU2670245C1 |
| РЕЗОНАТОР ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2020 |
|
RU2744820C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2007 |
|
RU2357213C1 |
| ВИХРЕВОЙ ЖИДКОСТНОЙ ТОРОИДАЛЬНЫЙ ГИРОСКОП | 2014 |
|
RU2573606C1 |
Изобретение относится к области приборостроения, в частности к гироскопии, и может быть использовано в системах управления. Твердотельный волновой гироскоп содержит герметичный корпус, состоящий из кожуха и основания с выводами, во внутренней полости которого установлен центрирующий элемент, обеспечивающий соосное расположение резонатора, емкостной системы регистрации колебаний оболочки резонатора и электромагнитной системы возбуждения и поддержания колебаний оболочки резонатора, при этом электромагнитная система возбуждения и поддержания колебаний оболочки резонатора выполнена в виде электромагнитов, сердечники которых имеют П-образную форму, равномерно расположенных по окружности оболочки резонатора, причем плоскость симметрии каждого электромагнита, проходящая через полюса, параллельна оси симметрии резонатора и проходит через нее. Технический результат – повышение точности и сокращение времени измерений. 9 ил.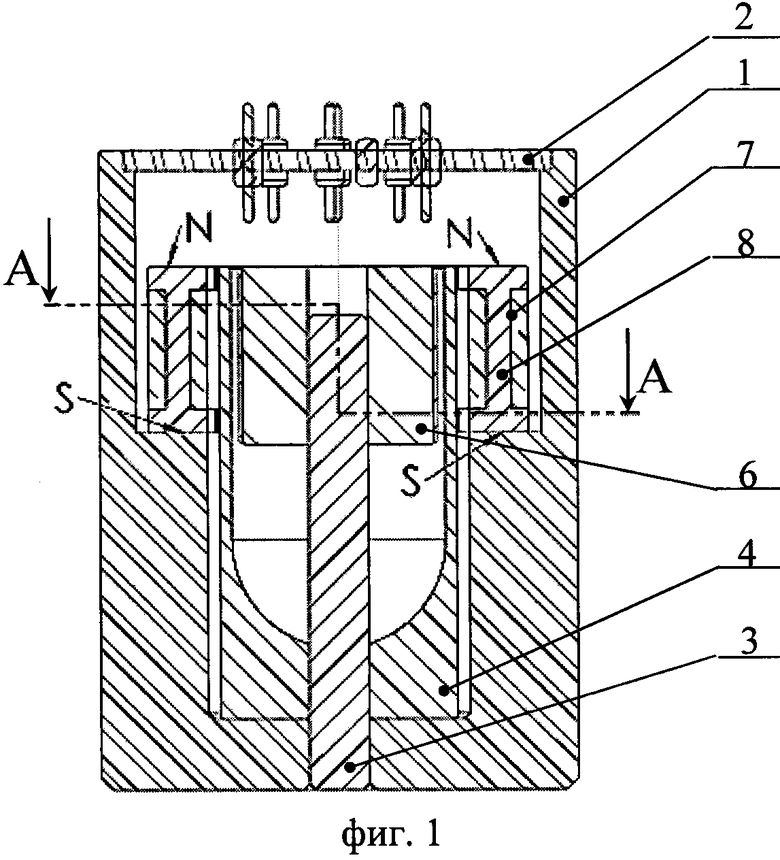
Твердотельный волновой гироскоп, содержащий герметичный корпус, состоящий из кожуха и основания с выводами, во внутренней полости которого установлен центрирующий элемент, обеспечивающий соосное расположение резонатора, емкостной системы регистрации колебаний оболочки резонатора и электромагнитной системы возбуждения и поддержания колебаний оболочки резонатора, отличающийся тем, что электромагнитная система возбуждения и поддержания колебаний оболочки резонатора выполнена в виде электромагнитов, сердечники которых имеют П-образную форму, равномерно расположенных по окружности оболочки резонатора, причем плоскость симметрии каждого электромагнита, проходящая через полюса, параллельна оси симметрии резонатора и проходит через нее.
| US 4793195 A, 27.12.1988 | |||
| Машина для накатывания в рулоны марли для бинтов заданной длины | 1959 |
|
SU123937A1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ В ЧУВСТВИТЕЛЬНОМ ЭЛЕМЕНТЕ ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518632C2 |
| US 4316394 A, 23.02.1982. | |||

