Настоящее изобретение относится к грузоподъемному крану, в частности к башенному поворотному крану, с возможностью поворота вокруг вертикальной оси стрелой крана, на которой расположена крановая тележка с возможностью передвижения, от которой отходит соединенный с грузовым крюком подъемный трос, а также с устройством определения положения грузового крюка для определения положения грузового крюка.
Башенные поворотные краны могут иметь, по меньшей мере, приближенно располагающуюся стрелу крана, которую несет вертикально продолжающаяся башня, и с возможностью поворота вокруг вертикальной продольной оси башни. В так называемом верхнем поворотном кране стрела крана поворачивается на нем относительно башни, в то время, как в нижнем поворотном кране - вся башня, а вместе с ней поворачивается соединенная к ней шарнирно стрела крана. Расстояние грузового крюка от оси башни можно регулировать посредством крановой тележки, с возможностью ее передвижения вдоль стрелы крана, причем соединенный с грузовым крюком подъемный трос проходит через указанную крановую тележку.
При этом по различным причинам желательно определять насколько возможно точно положение грузового крюка посредством соответствующего устройства определения положения грузового крюка. Это может быть предпочтительно не только, когда грузовой крюк уже не видит крановщик, например, за стеной, но и тогда, когда положение крановой тележки больше точно не совпадает с расположением грузового крюка, в частности, более не конгруэнтно в вертикальном направлении (имеется ввиду, что из-за глубины опускания грузового крюка положение по высоте грузового крюка и крановой тележки расходятся). Такое расхождение положения грузового крюка от положения крановой тележки может иметь различные причины, например, непрямой ход подъемного троса или такие динамичные отклонения, как качающиеся движения груза или отклонения из-за ветра. При этом в зависимости от выполняемой задачи может быть достаточным, определять расположение грузового крюка только относительно крановой тележки, или грузоподъемного крана, например, для гашения качающихся движений, или также может потребоваться абсолютное расположение грузового крюка в пространстве, например, для выполнения автоматизированных погрузочно-разгрузочных работ. Не считая такого применения сигнала о расположении грузового крюка с целью управления, посредством определения расположения грузового крюка, можно достигать также повышенной безопасности, так как груз можно постоянно контролировать, причем при необходимости можно также дублировать датчик глубины опускания.
При этом из уровня техники известна оптическая регистрация положения грузового крюка. Например, в публикации JP 9-142773 показан грузоподъемный кран, на конце стрелы которого, от которого отходит подъемный трос, находится смотрящая вниз камера, направление обзора которой изменяется для сопровождения качающихся движений грузового крюка, поэтому крановщик посредством камеры всегда может видеть грузовой крюк.
В DE 19725315 С2 описывается грузоподъемный кран для прокатных цехов, с шасси грузовой тележки с возможностью передвижения относительно несущей рамы, от которой отходит подъемный трос. На несущей раме расположено несколько камер, поле зрения которых достаточно большое для возможности регистрации крюка крана при различных положениях шасси крановой тележки. В таком грузоподъемном кране для прокатных цехов подъездные положения заданы относительно фиксированными, поэтому обрабатываемый массив видеоданных удобен для пользования. Если бы такая система использовалась вместо этого для башенного поворотного крана, едва ли можно было реализовать обрабатываемый поток данных.
Кроме того, из публикации WO 2005/082770 А1 известен башенный поворотный кран, на крановой тележке которого установлена смотрящая вниз камера для передачи видеоизображения обстановки вокруг грузового крюка крановщику, чтобы крановщик лучше мог распознавать расположенные преград в направлении движения. Эта система камер служит для визуального отображения преград или разгрузочно-приемного участка, куда должен держать курс крановщик, однако она не определяет при этом расположение грузового крюка относительно грузоподъемного крана или абсолютно в пространстве.
В DE 4190587 С2 описан корабельный крановый перегружатель контейнеров, в котором расположение грузового крюка определяется посредством камеры, установленной в устройстве навешивания для кранового каната. При этом на контейнерах установлено несколько излучающих вверх источников света, регистрируемых камерой. Однако это едва ли можно было без затруднений осуществить в таких кранах, как башенные поворотные краны, принимающие также такие грузы, как строительные изделия, часто значительно меньшие, чем контейнер, поскольку в таких случаях уже нет в распоряжении занимающей большую площадь верхней стороны контейнера.
Подобным образом с источниками света работают в документе DE 10245970 А1, в котором также дополнительно груз облучают сверху посредством источника света. Другой размещенный на принимаемом грузе источник света посылает вверх световой сигнал на приспособление для подвески так сказать, в виде оптического эха, только тогда, когда груз облучается верхним источником света.
В US 6351720 В1 раскрыт крановый перегружатель контейнеров, в котором положение груза определяют посредством нескольких камер, она из которых расположена на крановой тележке грузоподъемного крана, а другая - на портале грузоподъемного крана для возможности обнаружения перекосов грузоподъемного крана. Тем не менее, это влечет за собой очень дорогостоящую обработку данных, кроме того, существует проблема, что вторая камера будет иметь нарушенное поле зрения вследствие препятствий.
В основе данного изобретения лежит задача создать улучшенный башенный поворотный кран указанного типа, лишенный недостатков уровня техники и усовершенствованный предпочтительным способом. В частности, следует достигнуть лучшего определения положения грузового крюка, обходящегося ограниченным массивом обработки данных, а вместе с этим ограниченной производительностью ЭВМ, однако точно определяющего положение без увеличенной задержки по времени.
Согласно изобретению, данная задача решается башенным поворотным краном согласно пункту 1 формулы изобретения. Предпочтительные варианты выполнения изобретения являются предметом зависимых пунктов формулы изобретения.
В частности, предлагается оптически определять расположение грузового крюка посредством камеры, установленной на крановой тележке грузоподъемного крана и смотрящей из крановой тележки в заданном, а вместе с тем в известном направлении обзора вниз на грузовой крюк. При этом положение грузового крюка определяется блоком оценки видеоданных в изображении камеры. Из положения грузового крюка на изображении камеры и положения крановой тележки вычислительные средства определяют затем фактическое положение грузового крюка. При этом изобретение исходит из соображения, что при заданном направлении обзора размещенной на крановой тележке камеры, положение грузового крюка в изображении камеры соответствует расположению грузового крюка относительно крановой тележки или является мерой измерения расположения грузового крюка относительно крановой тележки и можно определять, благодаря этому, при дополнительном привлечении положения крановой тележки абсолютное положение грузового крюка в пространстве. Если камера крановой тележки смотрит точно вертикально вниз, положение грузового крюка на изображении камеры или отклонение от места грузового крюка от центра изображения камеры является мерой измерения для поперечного или горизонтального смещения грузового крюка относительно крановой тележки, причем указанное горизонтальное смещение грузового крюка может определяться относительно крановой тележки при привлечении соответствующей глубины опускания грузового крюка, т.е. расстояния грузового крюка от крановой тележки, а при необходимости регулируемого коэффициента изменения масштаба изображения камеры. Предпочтительно, если не требуются несколько камер или изображений из различных осей обзора, так как определение положения можно осуществлять при помощи только одной камеры или только из одного изображения камеры, вследствие чего значительно экономится вычислительная мощность.
При этом расстояние грузового крюка от крановой тележки можно определять различным способом. С одной стороны, можно определять глубину опускания грузового крюка из смотанной длины подъемного троса, дающей достаточно точную меру измерения расстояния грузового крюка от крановой тележки или от смонтированной на ней камеры даже при не точно прямом ходе подъемного троса, чтобы определять фактическое относительное положение или фактическое горизонтальное смещение грузового крюка относительно крановой тележки из указанного расстояния грузового крюка от крановой тележки и из определенного на изображении камеры положения изображения грузового крюка или смещения грузового крюка от центра изображения.
Альтернативно или дополнительно расстояние грузового крюка от крановой тележки или размещенной на ней камеры можно определять также из самого изображения камеры, в частности, посредством блока оценки видеоданных, определяющего количество пикселей в изображении грузового крюка и/или в соединенной с ним навесной детали, например, поворотного блока троса или в другого элемента структуры грузоподъемного крана, находящегося согласно предназначению рядом с грузовым крюком, или также в связанной вместе с ним маркировке и/или определяют размер грузового крюка или указанной навесной детали указанной маркировки на изображении камеры. При известном размере грузового крюка или известном размере навесной детали или маркировки можно очень точно определять расстояние крюка крана или навесной детали, или маркировки по коэффициенту изменения масштаба изображения камеры и количеству пикселей и/или из размера изображения в изображении камеры. Определение расстояния грузового крюка крановой тележки посредством подсчета пикселей может происходить дополнительно к альтернативному определению глубины опускания, например, из длины сматывания троса для достижения избыточной системы определения глубины опускания грузового крюка, а вследствие этого - повышения безопасности. К тому же, при необходимости, альтернативно также может быть предусмотрено оптическое определение посредством оценки пикселей.
Идентификация грузового крюка в подготовленном камерой изображении камеры может осуществляться, по существу, различными способами, например, посредством оценки пикселей и/или оценки контура, и/или оценкой цвета. В частности, могут определяться комбинация элементов растра, соответствующая грузовому крюку, и/или соединенной с ним навесной детали, например, блока троса или специальной маркировки, а также очертание контура и цвет грузового крюка и/или соединенной с ним навесной детали. Для этого, для анализа изображения камеры могут использоваться известные по себе алгоритмы для обработки изображений, такие, как двоичное составление изображения, обнаружение кромок или отбор признаков. Для повышения вероятности обнаружения или упрощения идентификации крюка крана или нанесенной на нем маркировки, предоставленное изображение может подвергаться также спектральному анализу, причем, могут анализироваться, например, свойства отражения.
Для упрощения обнаружения грузового крюка на изображении камеры, блок оценки видеоданных может содержать средство определения хода троса для определения хода троса, отходящего от крановой тележки подъемного троса. Отходящий от крановой тележки подъемный трос имеет в предоставленном изображении камеры, как правило, очень характерный контур в виде очень тонких, длинных прямых линий или только очень легко выгнутой, длинной, тонкой линии, исходная точка которой, вследствие поворота в крановой тележке, располагается в изображении камеры в относительно узко ограниченном участке, а поэтому может легко идентифицироваться. В частности, отходящий от крановой тележки подъемный трос в предусмотренном, как правило, входе в грузовой крюк или в соединенный с ним грузовой блок производит на изображении камеры две остроугольные или конически сбегающиеся линии, в точке соединения которых можно предположить, по меньшей мере, приближенно положение грузового крюка.
При этом определяемые координаты положения грузового крюка могут предоставляться, по существу, различными способами, причем, предпочтительно, если абсолютные данные координат можно получать в абсолютной системе координат, которая может иметь, например, свое начало отсчета в основании грузоподъемного крана, причем, например, продольная ось башни может описывать ось Z, стрела крана - ось X, а вертикальная к ней ось - ось Y. При этом блок оценки видеоданных может распознать сначала изображенное положение грузового крюка в изображении камеры сначала в относительной системе координат, например, в системе координат крановой тележки, которая имеет свое начало отсчета в камере и/или в крановой тележке и направлена параллельно к вышеупомянутой абсолютной системе координат, причем, тем не менее, ось Z может проходить соответственно оптической оси камеры обратно к оси Z абсолютной системы. Данные координаты в этой относительной системе координат, которая может смещаться при движениях крановой тележки, пересчитываются затем средствами определения положения, учитывая положение крановой тележки в координатах вышеупомянутой абсолютной системы координат.
Для упрощения оценки видеоданных и уменьшения массива памяти, в усовершенствованном варианте изобретения на грузовом крюке или на соединенном с ним грузовом блоке, посредством которого подъемный трос поворачивается в грузовом крюке, расположена маркировка заданного размера и/или заданного очертания, нанесенная на верхней стороне грузового крюка или грузового блока и/или обращенная к крановой тележке или к размещенной на ней камере, которая видит ее. Указанная маркировка может быть выполнена для этого, как отдельный элемент, например, в виде размещенной на внешней стороне на блоке - тарелки или мишени, причем такой отдельный элемент может быть смонтирован или пристроен на грузовом крюке или на соединенным с ним грузовом блоке, например, может быть приварен или привинчен.
Альтернативно или дополнительно к такому отдельному элементу маркировки грузовой крюк и/или грузовой блок может быть даже выполнен сам в виде маркировки, например, при соответствующем очертании видимого с крановой тележки участка грузового крюка и/или грузового блока, причем в данном случае, например, грузовой крюк может быть очерчен со своей внешней стороны головного участка, может иметь, например, прямоугольный или круглый контур, например, профилирован в виде сверху, как треугольное расширение в форме гриба или в форме воротника.
В качестве маркировки могут быть предусмотрены, например, компоновка кольца в виде мишени или также другой геометрический базовый контур или базовая поверхность, например, треугольник, четырехугольник или многоугольник, круг, овал или эллипс, прямые или выгнутые линии или смешанные формы или их комбинации, причем для упрощения идентификации маркировки на изображении камеры, маркировка предпочтительно может быть составлена из контрастных по отношению друг к другу элементов поверхности, например, белый круг с черной точкой в его центре и/или сочные, отличающиеся от окружающих цветов цветовые решения, например, точки люминесцентных красок.
Для возможности определения не только положения, но и ориентации маркировки на изображении камеры, может предпочтительно использоваться отличающаяся от вращательно-симметричных форм маркировка, в частности, определенно ориентированные контуры маркировки используются, например, в виде буквы «Т» или равнобедренного, не равностороннего треугольника или им подобные. При применении таких маркировок можно определять посредством блока оценки видеоданных и соответствующей оценки изображения камеры не только точное расположение грузового крюка, но и искривление относительно ориентации стрелы крана, которое может происходить, например, при повороте висящего на грузовом крюке груза.
Кроме того, в частности, при трудных условиях сборки, дополнительно с отдельно нанесенным на крюке крана маркером, в качестве маркера, может использоваться сам по себе видимый крюк, например, вышеупомянутым способом при специальном оконтуривании обращенного к крановой тележке головного участка. Это может осуществляться по образцу распознавания лиц, используемого в системах видеонаблюдения. Для этого можно использовать геометрические признаки крюка крана в качестве маркера или маркировки. Это дает преимущество в том, что становятся ненужными отдельные надстройки маркеров, которые могут повреждаться или загрязняться при эксплуатации. Предпочтительным при развитии является то, что видимым должно быть только определенное количество заданных признаков. Даже при частичном скрытии отдельных признаков крюк крана еще надежно распознается по своему положению и ориентации.
Для содержания массива данных при оценке видеоданных наименьшим, в дальнейшем предпочтительном усовершенствованном варианте изобретения можно попеременно управлять оцениваемым участком изображения и/или размером оцениваемого изображения в зависимости различных параметров эксплуатации. Блок управления камеры может регулировать, в частности, коэффициент изменения масштаба изображения камеры в зависимости от глубины опускания грузового крюка, причем для этого, например, для предварительной установки коэффициента изменения масштаба изображения можно использовать определенную из длины сматывания подъемного троса глубину опускания и/или можно осуществлять юстировку или постюстировку коэффициента изменения масштаба изображения после проведенного определения расстояния посредством подсчета пикселей и/или определения размера изображения, как это разъяснено выше. В частности, с увеличением глубины опускания, или с возрастанием расстояния грузового крюка от крановой тележки увеличивается коэффициент масштаба изображения для достижения определенного размера изображения крюка крана или связанной с ним маркировки в изображении камеры. Значительно облегчает идентификацию маркировки или грузового крюка в изображении камеры, когда блок оценки видеоданных предварительно, по меньшей мере, приближенно знает, величину идентифицируемого образца пикселей во всем изображении, или какую часть площади изображения занимает изображение маркировки или грузового крюка на всем изображении.
Альтернативно или дополнительно указанный коэффициент изменения масштаба изображения устройства управления камеры может изменяться также в зависимости от других величин, в частности, в зависимости результата попытки оценки изображения. Если грузовой крюк или вместе с ним связанную маркировку нельзя идентифицировать на изображении при заранее установленном коэффициенте изменения масштаба изображения, можно уменьшить коэффициент изменения масштаба изображения для возможности обследования большего фрагмента изображения окружающей местности. При необходимости можно неоднократно многократно уменьшать коэффициент изменения масштаба изображения для обследования все более больших участков в несколько этапов. Однако альтернативно или дополнительно коэффициент изменения масштаба изображения также можно увеличивать, если грузовой крюк или связанную вместе с ним маркировку нельзя идентифицировать на изображении камеры, когда при случае дело может быть также в том, что грузовой крюк при слишком маленьком коэффициенте изменения масштаба изображения изображается слишком маленьким, поэтому резкость изображения или количество пикселей не достаточно для идентификации известного образца контура маркировки и/или грузового крюка и/или грузового блока.
Альтернативно или дополнительно к такой регулировке коэффициента изменения масштаба изображения камеры, устройство управления камеры и/или блок оценки видеоданных может изменять также оцениваемый участок в пределах предоставленного камерой изображения камеры для поддержания наименьшим оцениваемый массив памяти. Интересуемый фрагмент изображения можно увеличивать, в частности тогда, когда маркировка или грузовой крюк пропала в ранее оцениваемом фрагменте изображения, например, при выходе грузового крюка под воздействием более сильных качающихся движений или более сильной нагрузки от ветра из указанного фрагмента изображения. При пропадании маркировки или грузового крюка в исследуемом блоком оценки видеоданных фрагменте изображения, указанный фрагмент изображения можно однократно или также многократно растягивать в несколько этапов, при необходимости, пока он не займет все изображение камеры. Предпочтительно, если блок оценки видеоданных выполнен так, что при увеличении интересующего или оцениваемого фрагмента изображения снова оценивается только захваченный участок фрагмента изображения, например, элемент фрагмента изображения в форме рамы, который при увеличении фрагмента изображения добавляется вокруг предыдущего фрагмента изображения.
Альтернативно или дополнительно к такому однократному или многократному увеличению фрагмента изображения, оцениваемому блоком оценки видеоданных для идентификации положения грузового крюка или размещенной на нем маркировки, после того, как грузовой крюк или связанную с ним маркировку можно идентифицировать в полученном изображении камеры, фрагмент изображения можно перемещать и/или уменьшать, предпочтительно так, что новый, снова исследуемый фрагмент изображения центрируют в отношении идентифицированного положения грузового крюка или связанной с ним маркировки, т.е. идентифицированная маркировка располагается в центре нового фрагмента изображения.
Альтернативно или дополнительно фрагмент изображения можно однократно или многократно уменьшать, в частности, предпочтительно так, что передающая маркировку или грузовой крюк комбинация элементов растра или соответствующий образец контура изображения занимает заданную часть площади соответствующего фрагмента изображения, например, воспроизводит 20% поверхности используемого для оценки фрагмента изображения.
Положение грузового крюка можно определять из изображения камеры, предпочтительно, не только относительно крановой тележки грузоподъемного крана, но и абсолютно и/или относительно окружающей местности грузового крюка, например, окружающей местности строительных площадок. В усовершенствованном варианте изобретения устройство определения положения может иметь средство определения окружающей местности для определения окружающей местности грузового крюка, в частности, в виде характерных контуров преград и/или окружающей местности, из снятого изображения камеры, причем средства определения положения для определения расположения грузового крюка из определенного положения изображения грузового крюка на изображении камеры могут быть выполнены так, что положение грузового крюка определяется относительно окружающей местности грузового крюка.
Положение грузового крюка относительно окружающей местности, которое можно определять указанным способом из изображения камеры, можно предпочтительно определять для управления движениями грузоподъемного крана, в частности для того, чтобы подъезжать к цели грузового крюка, например, к погрузочно-разгрузочному положению или к положению приема груза, или для остановки движений грузоподъемного крана или, для автоматического изменения пути перемещения грузового крюка в целях предотвращения столкновения грузового крюка и/или поднятого им груза с идентифицированной на изображении камеры преградой, например, с краем здания. Для этого грузоподъемный кран может иметь средства направления к цели грузового крюка для управления движениями грузоподъемного крана в зависимости от определенного расположения грузового крюка относительно окружающей местности грузового крюка и/или средства управления для предотвращения столкновения для остановки или изменения движений грузоподъемного крана в зависимости от определенного расположения грузового крюка относительно окружающей местности грузового крюка.
Изобретение поясняется чертежами, на которых представлено:
фиг. 1. Схематическое изображение башенного поворотного крана, на стреле крана которого предусмотрена с возможностью передвижения крановая тележка, от которой отходит соединенный с грузовым крюком подъемный трос и на котором расположена камера для определения положения грузового крюка;
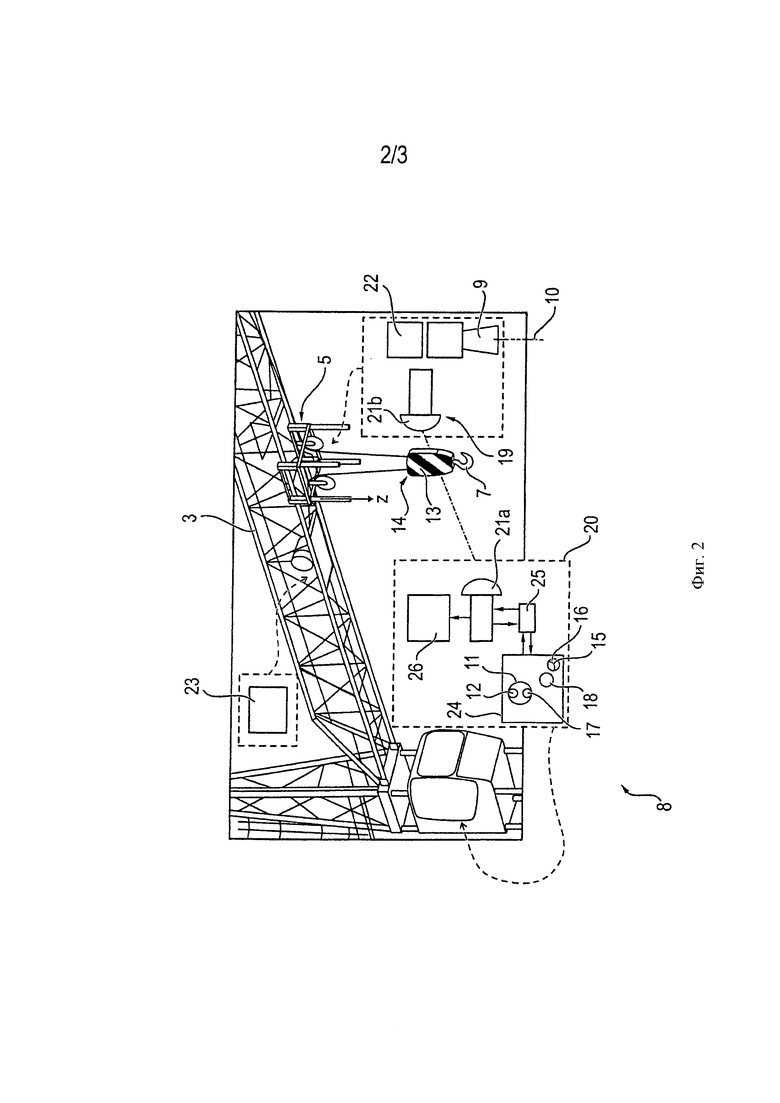
фиг. 2. Увеличенное, фрагментарное изображение предусмотренной на стреле крана крановой тележки и соединенных с камерой системных компонентов для передачи изображения и оценки видеоданных, а также для определения положения;
фиг. 3. Изображение связанной с грузовым крюком грузового блока нанесенной на верхней стороне соединенного с грузовым крюком грузового блока маркировкой, с возможностью идентификации в предоставленном камерой изображении камеры;
фиг. 4. Изображение маркировки, также, как на фиг. 3, причем маркировка в противоположность к фиг. 3 имеет определенную ориентацию также для возможности определения ориентации или положения поворота грузового крюка дополнительно к положению, и
фиг. 5. Предоставленное камерой изображение камеры грузового крюка, причем в изображении камеры можно видеть ход подъемного троса, по которому также можно определять положение грузового крюка и/или упрощать идентификацию грузового крюка или связанной вместе с ним маркировки в изображении камеры.
Как показано на фиг. 1, грузоподъемный кран может быть выполнен как поворачивающийся наверху башенный поворотный кран 1, вертикально продолжающаяся башня 2 которого несет стрелу 3 крана, а также контрстрелу крана. Указанная стрела 3 крана может поворачиваться относительно башни 2 вокруг вертикальной продольной оси 4 башни и занимать, по меньшей мере, приближенно горизонтальное положение. В указанной стреле 3 крана подвешена крановая тележка 5 с возможностью передвижения, поэтому крановая тележка 5 может перемещаться, по существу, по всей длине стрелы 3 крана для изменения разгрузки грузового крюка 7. При этом указанный грузовой крюк 7 фиксирован на подъемном тросе 6, проходящем через указанную крановую тележку 5 для возможности опускания и подъема грузового крюка 7. Для этого известным способом на грузовом крюке 7 может быть предусмотрен грузовой блок 13, ср. фиг. 2, через который поворачивается или проходит подъемный трос 6 на грузовом крюке 7.
Как показано на фиг. 2, содержит устройство 8 для определения положения грузового крюка содержит установленную на крановой тележке 5 камеру 9, с возможностью ее передвижения вместе с крановой тележкой 5 и смотрящую от крановой тележки 5, по существу, вертикально вниз. Как показано на фиг. 2, ось обзора камеры 9 может совпадать с осью Z локальной или относительной системы координат крановой тележки.
Предоставленные камерой 9 видеоданные могут передаваться предпочтительно беспроводно работающим передающим устройством 19, например, в виде радиопередающего устройства в систему 20 обработки и оценки видеоданных, которое может быть расположено предпочтительно на участке кабины или блока управления грузоподъемного крана и может содержать соответствующий приемо-передающий блок 21а, с возможностью его взаимодействия с приемо-передающим блоком 21b передающего устройства 18 в крановой тележке. По существу, оценка видеоданных также может осуществляться непосредственно в камере 9 или на крановой тележке 5, однако предпочтительно там только собирать видеоданные, а затем передавать их и оценивать в другом месте для возможности выполнения небольшой и легко монтируемой системы на участке крановой тележки. Для снабжения камеры 9 энергией в крановой тележке 5 может быть предусмотрен накопитель 22 энергии, например, в виде аккумулятора, заряжаемый посредством зарядной станции 23, которая может быть расположена в стреле 3 крана, например, на участке неиспользуемого положения крановой тележки 5 для возможности зарядки накопителя 22 энергии кроме времени эксплуатации грузоподъемного крана.
Система 20 обработки и оценки видеоданных может содержать центральную ЭВМ 24, например, в виде промышленного ПК с системой обработки изображений, с возможностью его соединения посредством видеосервера 25 с приемо-передающим блоком 21 для приема или запроса, с одной стороны, сигналов изображения камеры 9 или, а, с другой стороны, чтобы передавать командные сигналы камере 9.
Как показано на фиг. 2, на участке кабины управления машиниста крана может быть также предпочтительно предусмотрен видеодисплей 26 для возможности передачи изображения камеры 9 крановщику также дополнительно для определения положения. Для обнаружения и идентификации реализованным в ЭВМ 24 блоком 11 оценки видеоданных для определения грузового крюка 7 в предоставленном камерой 9 изображении камеры, предварительно предпочтительно определяют признаки грузового крюка 7 и/или соединенного с ним грузового блока 13, например, геометрические поверхности, формы, контуры, цвета и так далее, причем в предпочтительном усовершенствованном варианте изобретения маркировка 14 может наноситься предпочтительно с внешней стороны на грузовом крюке 7 или грузовом блоке 13, поэтому маркировка 14 в поле зрения для камеры 9.
Как показано на фиг. 3, маркировка 14 в виде мишени может состоять контрастных по отношению друг к другу колец, вставленных друг в друга. Однозначно ориентированная маркировка 14 может использоваться предпочтительно, однако альтернативно к такой вращательно-симметричной маркировке, также предпочтительно использовать для этого снова контрастное изображение, как показано на фиг. 4, например, в виде буквы "Т". Тем не менее, имеется ввиду, что вместо такого "Т" маркировка 14 может иметь также другие признаки для определения ориентации, например, могут предусматриваться два или большее количество вращательно-симметричных маркеров в геометрическом отношении друг к другу, и/или могут найти применение другие прямоугольные формы маркера с ориентирующим покрытием и/или в качестве маркировки можно использовать сами геометрические формы груза или устройства для захвата груза, как, например, контейнерный спредер кранового перегружателя контейнеров.
Предпочтительно камерой 9 также управляют посредством командных сигналов системы 20 обработки и оценки видеоданных, причем командные сигналы могут передаваться в данном случае также посредством показанной на фиг. 2 радиосвязи. При этом блок 11 оценки видеоданных пытается обнаружить груз или грузовой крюк 7 посредством заданной маркировки 14 среди предоставленных камерой 9 изображений. При этом анализ предоставленного изображения камеры может осуществляться различными алгоритмами, например, двоичным составлением изображения, обнаружения кромок и/или отбором признаков.
При помощи скорости актуализации предоставленных камерой 9 изображений камеры и связанной с ней скоростью оценки блока 11 оценки видеоданных грузовой крюк 7 или находящийся на нем груз может определяться не только статично на изображении, но и при динамичных движениях груза. Для этого может осуществляться сопровождение груза, так называемое отслеживание.
Для поддержания идентификации маркировки 14 на изображении камеры, из блока управления крана может предоставляться, предпочтительно постоянно глубина опускания грузового крюка 7, на основе которой можно оценить, по меньшей мере, приближенно, на каком удалении находится грузовой крюк 7 от камеры 9. Затем система 20 обработки и оценки видеоданных соответственно регулирует масштаб изображения камеры 9.
Анализ соответственно предоставленного изображения камеры может происходить постоянно, предпочтительно посредством обнаружения кромок, двоичного формирования изображения и отбора признаков в отношении известной маркировки 14. При этом обработка проводится предпочтительно в пределах задаваемого фрагмента изображения в определенной области изображения камеры. Так как размер, в зависимости от случая эксплуатации может выдерживаться очень небольшим, это значительно снижает затраты машинного времени. Фрагмент изображения может выбираться при этом настолько маленьким, что он соответствует, по существу, размеру маркера. Альтернативно или дополнительно анализируемый фрагмент изображения может соответствовать максимально, по существу, всему размеру полного изображения камеры.
Положение и/или размер указанного фрагмента изображения может определяться на основе последних известных положений маркировки и оцененного прогноза. Для этого может использоваться, например, так называемы фильтр Калмана или также другие фильтрующие устройства, которые могут давать прогноз на основе прошлых величин.
Если при инициализации обработки изображений в распоряжении отсутствуют прошлые положения маркировки для прогноза, исследуемый фрагмент изображения можно произвольно вкладывать в изображение. Если в этом фрагменте изображения не присутствует никакая маркировка, фрагмент изображения можно непрерывно увеличивать, до тех пор, пока маркировка 14 расположится в пределах фрагмента изображения и ее можно определить.
Как только маркировка 14 будет обнаружена в изображении камеры, блок 11 оценки видеоданных определяет изображенное положение грузового крюка 7 или маркировки 14 в изображении камеры, на основе чего средства 12 определения положения определяют затем положение грузового крюка в относительной системе координат крановой тележки 5. Указанная относительная система координат крановой тележки может выбираться так, что она имеет свое начало отсчета в оптической оси камеры 9 и в нулевой точке глубины опускания, которая может находиться в крановой тележке 5.
Посредством известного размера маркировки 14, установленного в данный момент коэффициента изменения масштаба изображения камеры 9, а также измеренного сенсорным устройством количества пикселей маркировки 14 на изображении камеры может производиться точное определение удаления маркировки 14 от крановой тележки 5. Из этого может устанавливаться смещение Z или дифференция Z грузового крюка 7 к глубине опускания, которую можно устанавливать, например, при определении смотанной длины подъемного троса. При отдельном измерении фактической глубины опускания посредством величины пикселей маркировки 14 на изображении камеры можно достигать дублирования обычного датчика глубины опускания.
Так как при реальном использовании груз вследствие движений грузоподъемного крана, влияния ветра или динамики грузоподъемного крана никогда в действительности не находится в состоянии покоя, груз качается, причем частота качения находится в зависимости от длины троса подъемного троса 6. Амплитуда качения зависит от массы и других факторов, таких, как динамика движения или добавление ветра.
Для улучшения вероятности обнаружения для обнаружения маркировки 14 в изображении камеры при оценке видеоданных, оценка может осуществляться для этого также, где предположительно будет находиться грузовой крюк 7 при следующих измерениях, причем для этого также может использоваться вышеупомянутый фильтр Калмана.
Если маркировка 14 выходит вследствие слишком большой амплитуды качения из изображения камеры, устройство оценки изображения может потерять маркировку 14. Для повторного возможно быстрого обнаружения маркировки 14, нужно поступать следующим образом:
например, сначала анализируемый фрагмент изображения камеры растягивают на фрагмент изображения, или увеличивают и/или перемещают, ожидая повторного вхождения маркировки 14. Альтернативно или дополнительно все изображение камеры также можно определяться как фрагмент изображения, в частности, когда находящаяся в распоряжение вычислительная мощность достаточно большая.
Альтернативно или дополнительно к такому изменению фрагмента изображения, после потери маркировки 14, камера 9 может также повторно изменять масштаб изображения на одну или несколько ступеней для увеличения участка изображения. Вследствие настолько увеличенного участка изображения велика вероятность, что маркер снова будет располагаться в пределах изображения. Для компенсации недостатков ставшего в результате меньшего размера маркировки, коэффициент изменения масштаба изображения камеры 9 можно многократно в несколько этапах увеличивать, а также снова уменьшать.
Альтернативно или дополнительно к прежде названным стратегиям обработки изображений блок 11 оценки видеоданных может содержать средства 17 определения хода троса, посредством которых определяют ход подъемного троса 6 в изображении камеры, как этот показано на фиг. 5. Посредством обнаруженного хода подъемного троса в изображении камеры можно определять положение грузового крюка 7, или, по меньшей мере, сужать участок, на котором должен располагаться грузовой крюк 9 или маркировка 14, поэтому указанное определение хода подъемного каната может быть предусмотрено альтернативно или дополнительно к регистрации указанной маркировки или грузового крюка 7 непосредственно из изображения камеры.
Определение расположения грузового крюка или сужения участка, на котором должен находиться грузовой крюк 7 с помощью определения хода троса основывается на предпосылке, что подъемный канат 6 при входе в грузовой блок 13 имеет конический ход на изображении камеры, в частности, подходит конически к грузу, ср. фиг. 5, поэтому грузовой крюк 7 или груз и их положение можно определять, как конец определенного участками подъемного каната конуса.
В усовершенствованном варианте изобретения для повышения вероятности обнаружения в отношении интересующих поверхностей и контуров на изображении камеры, измеренное изображение может подвергаться также спектральному анализу. Благодаря этому, например, свойства отражения признаков груза, грузового крюка 7 или маркировки 14 в определенных спектральных участках могут расширить объем признаков и использовать их для идентификации.
Такой способ может быть элементом предфильтрования изображения, заметно уменьшающего затем по количеству исследуемые с помощью указанных алгоритмов видеоданные. Это заметно снижает издержки алгоритмов для обнаружения расположения грузового крюка. Такие неблагоприятные погодные влияния как снег, лед, дождь, туман, солнечный свет, отброс тени и т.д., также можно компенсировать, по меньшей мере, частично.
Такой спектральный анализ можно также предпочтительно оптимизировать, применяя специальные лаки для маркировки 14, например, применяя лаки или другие покрытия поверхностей, имеющие только небольшие свойства отражения в близкой инфракрасной области.
Для упомянутого предфильтрования, например, известный в Landsat-алгоритм спутника может использоваться.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН И СПОСОБ УПРАВЛЕНИЯ ТАКИМ КРАНОМ | 2017 |
|
RU2728315C2 |
| КРАН | 2017 |
|
RU2734966C2 |
| СТРОИТЕЛЬНАЯ МАШИНА | 2017 |
|
RU2736896C2 |
| СТРОИТЕЛЬНАЯ МАШИНА | 2017 |
|
RU2754118C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ И/ИЛИ АВТОПОГРУЗЧИКА | 2017 |
|
RU2719048C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ И/ИЛИ АВТОПОГРУЗЧИКА | 2017 |
|
RU2741456C2 |
| БАШЕННЫЙ СТРЕЛОВОЙ КРАН | 2005 |
|
RU2290362C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДНЯТИЯ ГРУЗА | 2018 |
|
RU2768693C2 |
| КРАН, А ТАКЖЕ СПОСОБ КОНТРОЛЯ УСТРОЙСТВА ПРЕДОХРАНЕНИЯ ОТ ПЕРЕГРУЗОК УКАЗАННОГО КРАНА | 2016 |
|
RU2709322C2 |
| КРАН, А ТАКЖЕ СПОСОБ КОНТРОЛЯ ПРЕДОХРАНЕНИЯ ОТ ПЕРЕГРУЗОК ТАКОГО КРАНА | 2016 |
|
RU2722326C2 |


Изобретение относится к башенным кранам. Грузоподъемный кран с возможностью поворота вокруг вертикальной оси стрелой крана, на которой расположена крановая тележка с возможностью передвижения, от которой отходит соединенный с грузовым крюком подъемный трос, а также с устройством для определения положения грузового крюка для определения расположения грузового крюка. Положение грузового крюка можно определять визуально при помощи камеры, установленной на крановой тележке крана и смотрящей с крановой тележки в заданном, а вследствие этого известном направлении обзора вниз на грузовой крюк. Блок оценки видеоданных определяет положение грузового крюка на изображении камеры. Блок оценки видеоданных может содержать средства определения хода троса для определения хода троса, отходящего от крановой тележки подъемного троса. Точку соединения двух сбегающихся под острым углом или конических линий, представляющих ход подъемного троса, можно принимать по меньшей мере приближенно, как положение грузового крюка. Достигается расширение функциональных возможностей башенного крана. 15 з.п. ф-лы, 5 ил.
1. Грузоподъемный кран, в частности башенный поворотный кран, содержащий выполненную с возможностью поворота вокруг вертикальной оси (4) стрелу (3) крана, на которой расположена крановая тележка (5) с возможностью перемещения, от которой отходит соединенный с грузовым крюком (7) подъемный трос (6), а также с устройством (8) для определения положения грузового крюка для определения расположения грузового крюка, отличающийся тем, что устройство (8) для определения положения грузового крюка содержит установленную на крановой тележке (5) камеру, направленную в заданном направлении обзора вниз на грузовой крюк (7), блок (11) оценки видеоданных для определения положения грузового крюка (7) на предоставленном камерой (9) изображении камеры и средства распознания контура для распознания на изображении камеры контура грузового крюка и/или навесной детали, прикрепленной к грузовому крюку так, что определяется положение грузового крюка посредством контура грузового крюка и/или навесной детали, а также средства (12) определения положения для определения положения грузового крюка из определенного положения изображения грузового крюка (7) на изображении камеры с учетом положения крановой тележки.
2. Грузоподъемный кран по п.1, отличающийся тем, что блок (11) оценки видеоданных имеет средства (17) определения хода троса для определения хода подъемного троса на изображении камеры и блок (11) оценки видеоданных выполнен так, что положение грузового крюка (7) на изображении камеры определяется в зависимости от заданного хода подъемного троса.
3. Грузоподъемный кран по п.2, отличающийся тем, что блок (11) оценки видеоданных выполнен так, что положение грузового крюка идентифицируется на изображении камеры, как точка соединения двух прямых линий подъемного троса.
4. Грузоподъемный кран по п.1, отличающийся тем, что устройство (8) для определения положения грузового крюка содержит определяющие расстояние средства для определения расстояния грузового крюка (7) от крановой тележки (5), причем указанные средства для определения расстояния имеют счетчик пикселей для определения количества пикселей идентифицируемого на изображении камеры поверхности грузового крюка и/или маркировки.
5. Грузоподъемный кран по любому из пп.1-4, отличающийся тем, что содержит устройство для определения глубины опускания для определения глубины опускания грузового крюка (7) по длине сматывания подъемного троса (6).
6. Грузоподъемный кран по п.5, отличающийся тем, что горизонтальное смещение грузового крюка (7) относительно крановой тележки (5) определяется средствами (12) определения положения по определенному положению изображения грузового крюка (7) на изображении камеры с учетом соответственно установленного коэффициента изменения масштаба изображения камеры и определенной глубины опускания грузового крюка (7) и определенного расстояния грузового крюка (7) от крановой тележки (5).
7. Грузоподъемный кран по п.1, отличающийся тем, что содержит устройство для управления камерой для управления регулировкой камеры, и оно выполнено так, что коэффициент изменения масштаба изображения камеры (9) переменно регулируется в зависимости от глубины опускания грузового крюка.
8. Грузоподъемный кран по п.7, отличающийся тем, что устройство (15) управления камерой выполнено так, что коэффициент изменения масштаба изображения камеры (9) увеличивают и/или уменьшают в зависимости от распознания грузового крюка (7) и/или нанесенной на нем маркировки (14) на предоставленном камерой (9) изображении камеры, в частности, при нераспознании грузового крюка (7) и/или связанной с ним маркировки (14) его однократно или многократно уменьшают.
9. Грузоподъемный кран по любому из пп.1-4, отличающийся тем, что блок (11) оценки видеоданных имеет средства (16) управления фрагментом изображения для увеличения оцениваемого блоком (11) оценки видеоданных фрагмента изображения камеры в зависимости от распознания грузового крюка (7) и/или связанной с ним маркировки (14), причем названные средства (16) управления фрагментом изображения выполнены так, что при нераспознании грузового крюка (7) и/или связанной с ним маркировки, фрагмент изображения однократно или многократно увеличивают, начиная с самого маленького фрагмента изображения.
10. Грузоподъемный кран по любому из пп.1-4, отличающийся тем, что блок (11) оценки видеоданных имеет средства оценки пикселей для распознания комбинации элементов растра, соответствующих грузовому крюку и/или соединенной с ним навесной детали, в частности, блока троса, а также средства распознания цветов для распознания одного цвета и/или комбинации цветов на изображении камеры, соответствующих цвету или комбинации цветов грузового крюка и/или его навесной детали.
11. Грузоподъемный кран по п.1, отличающийся тем, что на грузовом крюке (7) и/или, на соединенном с ним грузовом блоке (13) нанесена обращенная к крановой тележке и видимая с нее маркировка (14), а блок (11) оценки видеоданных выполнен так, что на изображении камеры идентифицируются соответствующий маркировке контур и/или комбинация элементов растра.
12. Грузоподъемный кран по п.11, отличающийся тем, что маркировка (14), и/или грузовой крюк, и/или грузовой блок содержат геометрическую базовую поверхность такую как круг, многоугольник, линию и/или составленную из нескольких геометрических базовых поверхностей двухмерную базовую поверхность.
13. Грузоподъемный кран по п.12, отличающийся тем, что маркировка (14), и/или грузовой крюк, и/или грузовой блок выполнены с определенной ориентацией, а блок (11) оценки видеоданных имеет средства для определения ориентации грузового крюка (7), в частности определения угла поворота грузового крюка (7) относительно вертикальной оси.
14. Грузоподъемный кран по любому из пп.1-4, отличающийся тем, что содержит средства (18) для определения положения крановой тележки, содержащие средства определения положения перемещения для определения положения крановой тележки относительно стрелы крана и средства определения положения поворота для определения положения поворота стрелы (3) крана относительно оси (4) поворота, причем средства (12) определения положения грузового крюка выполнены так, что положение грузового крюка определяют из положения крановой тележки относительно стрелы (3) крана, положения поворота стрелы (3) крана и из изображенного положения грузового крюка (7) на изображении камеры (9).
15. Грузоподъемный кран по любому из двух пп.1-4, отличающийся тем, что устройство (8) определения положения имеет средства определения окружающей местности для определения окружающей местности грузового крюка из снятого изображения камеры, в частности, в виде характерных препятствий и/или контуров местности, причем средства (12) для определения положения для определения положения грузового крюка из определенных изображенных положений грузового крюка (7) на изображении камеры выполнены так, что определяется положение грузового крюка относительно окружающей местности.
16. Грузоподъемный кран по п.15, отличающийся тем, что содержит средства направления грузового крюка к цели для управления движениями крана в зависимости от положения грузового крюка относительно окружающей грузовой крюк местности и/или средства управления, предотвращающие столкновение для остановки или изменения движения крана в зависимости от положения грузового крюка относительно местности, окружающей грузовой крюк.
| KR 20010044401 А, 05.06.2001 | |||
| CN 201605104 U, 13.10.2010 | |||
| US 7656459 B2, 02.02.2010 | |||
| JP 8324963 A, 10.12.1996. |

