Настоящее изобретение относится к способу управления устройством трансмиссии транспортного средства, при этом устройство содержит приводной двигатель, механическую трансмиссию, соединенную с приводным двигателем, и гидравлическую трансмиссию, имеющую насос и n гидравлических двигателей, при этом n превышает или равно 1, при этом насос выполнен с возможностью своего приведения во вращение приводным двигателем для питания жидкостью гидравлических двигателей.
Например, из европейского патента ЕР 0 993 982 известно комбинированное использование гидравлической трансмиссии и механической трансмиссии. Гидравлическую трансмиссию используют, когда в этом возникает необходимость, в частности, для усиления механической трансмиссии в требующих этого условиях движения, например, в случае потери сцепления с дорогой по меньшей мере одного из колес транспортного средства, когда оно движется по скользкому грунту, такому как грунт на строительной площадке. Таким образом, в этих так называемых «нормальных» условиях использования гидравлического усиления расход насоса определяют таким образом, чтобы вращать колеса, связанные с гидравлической трансмиссией, с такой же скоростью, что и колеса связанные с механической трансмиссией. Следовательно, управление насосом зависит от полученной информации о скорости транспортного средства.
В некоторых случаях усиление необходимо производить на низкой скорости, например, в ситуации трогания с места транспортного средства после остановки. Однако в этих ситуациях полученная информация о скорости транспортного средства может быть недостаточно надежной, так как скорость является слишком низкой, чтобы ее можно было определить с достаточной точностью. Следовательно, контроль гидравлического усиления по скорости транспортного средства не является полностью эффективным. Необходимые вычисляемые данные могут быть в данный момент аберрантными, изменчивыми или ошибочными. В результате возникает риск отклонения между скоростями колес, приводимыми во вращение гидравлической трансмиссией, и скоростями колес, приводимыми во вращение механической трансмиссией, что мешает нормальной проходимости транспортного средства. В частности, это может приводить к рывкам, к слишком слабому тяговому усилию или к слишком сильному тяговому усилию на колесах, вращаемых гидравлической трансмиссией.
Настоящее изобретение призвано решить указанные проблемы и создать способ управления гидравлической трансмиссией, который обеспечивает эффективное гидравлическое усиление даже на низкой скорости.
Эта задача решается посредством того, что осуществляют так называемую фазу усиления «на низкой скорости», во время которой, когда транспортное средство движется при помощи механической трансмиссии, устанавливают заданное значение давления для разности давления между входом питания и выходом гидравлических двигателей, осуществляют питание гидравлических двигателей при помощи насоса, обнаруживают разность давления между входом питания и выходом гидравлических двигателей и регулируют расход насоса таким образом, чтобы указанная разность была по существу равна указанному заданному значению давления.
Таким образом, регулирование насоса осуществляют на основании заданного значения давления, не обязательно обращая внимание на реальную скорость транспортного средства. Колеса, связанные с гидравлической трансмиссией, приводятся во вращение надежно, с контролируемой скоростью, которая зависит от этого заданного значения давления. Фаза гидравлического усиления является реальной и эффективной, так как расход насоса регулируют для получения необходимой разности давления, что позволяет гидравлической трансмиссии выдавать значительный гидравлический крутящий момент, обеспечивающий контроль скорости колес, связанных с гидравлической трансмиссией, и, в случае необходимости, контролируемое повышение скорости. Заданное значение давления определяют таким образом, чтобы в зависимости от необходимого общего крутящего момента обеспечивать заданный гидравлический крутящий момент, соответствующий потребностям дополнения приводного крутящего момента.
Как будет показано ниже, можно прекратить фазу усиления на низкой скорости в различных условиях, например, когда параметр, характеризующий скорость транспортного средства, достигает определенного порога, и продолжить гидравлическое усиление классически, учитывая скорость транспортного средства, или отключить гидравлическое усиление.
Предпочтительно, обнаруживают ситуацию трогания с места транспортного средства при помощи механической трансмиссии и осуществляют фазу усиления на низкой скорости для обеспечения трогания с места.
Особый интерес представляет использование гидравлического усиления для обеспечения трогания с места после остановки. Действительно, если транспортное средство является грузовиком или строительной машиной, его трогание с места требует очень большого приводного момента, что приводит к значительной нагрузке на механическую трансмиссию и потребляет много энергии. Кроме того, повышение скорости может быть медленным. Крутящий момент для трогания с места транспортного средства является комбинацией приводного момента, развиваемого механической трансмиссией, и приводного момента, развиваемого гидравлической трансмиссией. Гидравлическое усиление обеспечивает более быстрое повышение скорости транспортного средства, которое выражается в меньшем потреблении энергии. Заданное значение давления позволяет надежно управлять гидравлической трансмиссией, несмотря на то, что в момент трогания с места скорость транспортного средства является очень низкой.
Предпочтительным является то, что при обнаружении ситуации трогания с места средства обеспечения трогания с места остаются не активированными, пока амплитуда привода акселератора транспортного средства не достигнет целевой амплитуды.
Это позволяет избежать неверной интерпретации воздействия на привод акселератора до трогания с места как потребность в обеспечении трогания с места. Иначе говоря, это позволяет избежать ситуации, когда водитель готовится начать движение, но не начал воздействовать на гидравлическую трансмиссию, и эта трансмиссия может произвести нежелательную паразитную тягу. Например, целевая амплитуда составляет порядка 5% полного хода привода акселератора. Предпочтительно, фазу усиления на низкой скорости, в частности, обеспечение трогания с места прекращают, когда происходит по меньшей мере одно из следующих событий:
- параметр, характеризующий скорость транспортного средства достигает заранее определенного значения (этим параметром может быть, например, скорость транспортного средства или скорость колес, вращаемых гидравлическими двигателями или скорость этих двигателей),
- продолжительность фазы усиления на низкой скорости достигает заранее определенного значения времени,
- выходной крутящий момент, необходимый для механической трансмиссии, уменьшается до заранее определенного значения,
- сцепление, соединяющее механическую трансмиссию с приводным двигателем, отпускают после заранее определенного времени, которое может быть равно 0, после его приведения в действие.
Фаза усиления на низкой скорости является временной. Чтобы ее прекратить, можно, например, изолировать насос от входных и выходных трубопроводов гидравлических двигателей или перевести насос в его конфигурацию нулевого рабочего объема, или же, как будет показано ниже, сделать так, чтобы гидравлические двигатели выдавали нулевой крутящий момент. Вышеупомянутые параметры являются простыми в применении и наглядно свидетельствуют о начале движения транспортного средства в нормальных условиях, то есть о том, что механическая трансмиссия самостоятельно выдает необходимый крутящий момент. Например, скорость транспортного средства, начиная с которой можно прекратить фазу усиления на низкой скорости, может составлять около 5 км/час и даже 2 км/час. Заранее определенное время может составлять около 1 мин, даже 30 секунд и даже 10 секунд. Если используемым параметром является требуемый выходной крутящий момент, заранее определенным значением может быть абсолютное значение, например, 4000 Н.м, или процентное выражение номинального максимального крутящего момента механической трансмиссии, например, 20%.
Предпочтительным является то, что заданное значение давления меняют во время фазы усиления на низкой скорости.
В частности, это изменение осуществляют в сторону уменьшения в течение времени, причем это уменьшение может быть постепенным (например, линейным), возможно, после первоначального горизонтального участка, в течение которого заданное значение давления поддерживают постоянным, в самом начале фазы усиления на низкой скорости. Это изменение заданного значения давления позволяет, с одной стороны, избегать несоответствия между скоростью вращения колес и реальной моментальной скоростью транспортного средства и, в частности, избегать рывков отрицательного крутящего момента. С другой стороны, оно позволяет прекращать гидравлическое усиление плавно, без рывков и без резкого уменьшения общего крутящего момента.
Предпочтительно, во время фазы усиления на низкой скорости заданное значение давления уменьшают от максимального значения CPmax до минимального значения CPmin, причем это минимальное значение CPmin достигается в конце фазы усиления на низкой скорости.
Предпочтительно, определяют потолок заданного значения давления Pmax и определяют максимальное заданное значение давления CPmax в соответствии с отношением CPmax = f x Pmax, при этом коэффициент f меньше или равен 1 и зависит от задаваемых характеристик усиления на низкой скорости, таких как амплитуда воздействия на привод акселератора транспортного средства.
Таким образом, изменение заданного значения давления может быть напрямую связано с воздействием на акселератор со стороны водителя транспортного средства. По мере приближения скорости транспортного средства к скорости, задаваемой водителем на первой передаче, водитель начинает отпускать привод акселератора, что по сути дела выражается в уменьшении потребности в крутящем моменте. Гидравлический крутящий момент усиления уменьшается естественным образом, следуя уменьшению потребности в крутящем моменте, выражающемуся в уменьшении амплитуды воздействия на привод акселератора, тогда как уменьшение тяги, производимой механической трансмиссией, может зависеть от степени отпускания привода сцепления.
Коэффициент f равен 1, когда амплитуда воздействия на привод акселератора по меньшей мере равна заранее определенному проценту полного хода указанного привода, при этом указанный заранее определенный процент составляет, в частности, от 20% до 40%, в частности, равен 30%.
Максимальный гидравлический крутящий момент усиления производят, пока значительная амплитуда воздействия выражает высокую потребность в крутящем моменте, в частности, при наборе скорости или при трогании с места.
Предпочтительно, заданное значение давления поддерживают в максимальном значении CPmax с начала фазы усиления на низкой скорости до момента, когда приведение в движение транспортного средства достигает определенного промежуточного режима, затем заданное значение давления уменьшают до минимального значения CPmin, достигаемого в конце фазы усиления на низкой скорости.
О достижении этого промежуточного режима судят по тому, что транспортное средство начинает двигаться достаточно явно и устойчиво, чтобы потребность в гидравлическом крутящем моменте усиления начала уменьшаться.
Предпочтительно, заданное значение давления уменьшают в соответствии с определенным правилом изменения, в частности, с правилом линейного изменения.
Предпочтительным является то, что промежуточный режим достигают, когда параметр, характеризующий скорость транспортного средства, достигает определенного промежуточного значения.
Например, целевая промежуточная скорость составляет порядка 2 км/час.
Предпочтительно, разрешают или не разрешают активацию усиления на низкой скорости.
Предпочтительно, во время фазы усиления на низкой скорости расход насоса регулируют, изменяя рабочий объем указанного насоса.
Это является простым и надежным способом изменения расхода насоса. Другой возможностью является изменение скорости приводного двигателя, но оно является сложным на низкой скорости, в частности, во время трогания с места транспортного средства, когда этот двигатель испытывает большую нагрузку для этого трогания с места. Еще одной возможностью, когда насос связан с приводным двигателем через интерфейс, позволяющий изменять передаточное отношение вращения насоса этим двигателем, является изменение указанного отношения.
Предпочтительно, осуществляют переход между фазой усиления на низкой скорости и фазой гидравлического усиления, в которой расход насоса определяют в зависимости от выходной скорости механической трансмиссии.
В частности, n гидравлических двигателей гидравлической трансмиссии являются двигателями с радиальными поршнями. Таким образом, гидравлический двигатель или каждый гидравлический двигатель может содержать:
- картер с волнистым многолепестковым кулачком,
- блок цилиндров, установленный с возможностью вращения относительно кулачка вокруг оси двигателя и содержащий радиальные цилиндры, в которых перемещаются радиальные поршни, и
- внутренний распределитель жидкости, неподвижный во вращении относительно кулачка и имеющий распределительные каланы, выполненные с возможностью соединения с входом жидкости и с выходом жидкости, чтобы, когда двигатель является активным, поочередно соединять цилиндры с входом питания и выходом.
В частности, распределитель имеет радиальную распределительную сторону, на которую выходят распределительные каналы и которая поддерживается в положении опоры на соответствующую радиальную сторону блока цилиндров, на которую выходят каналы цилиндров. Гидравлический двигатель или каждый гидравлический двигатель можно отключить путем отсоединения его поршней, то есть убрав поршни в их цилиндры, чтобы они перестали входить в контакт с кулачком. Это отсоединение можно осуществить путем установления давления отсоединения во внутреннем пространстве картера и, возможно, при помощи возвратных пружин, связанных с поршнями. После отсоединения поршней распределительные каналы могут иметь одинаковое давление, в частности, низкое давление подкачки.
В частности, предусмотрен гидравлический двигатель для каждого из колес, которые могут приводиться во вращение гидравлической трансмиссией, при этом ротор двигателя, предусмотренный для приведения во вращение колеса, напрямую связан с колесом, чтобы вращать его со своей выходной скоростью.
В частности, предусмотрен гидравлический двигатель для каждого из колес, которые могут приводиться во вращение гидравлической трансмиссией, и эти двигатели являются двигателями с вращающимся кулачком, при этом их картер может образовать часть ступиц колес, с которыми они связаны.
Таким образом, в зависимости от уровня скорости транспортного средства переходят от одного варианта усиления к другому.
Изобретение и его преимущества будут более очевидны из нижеследующего описания варианта выполнения, представленного в качестве не ограничительного примера со ссылками на прилагаемые чертежи, на которых представлено:
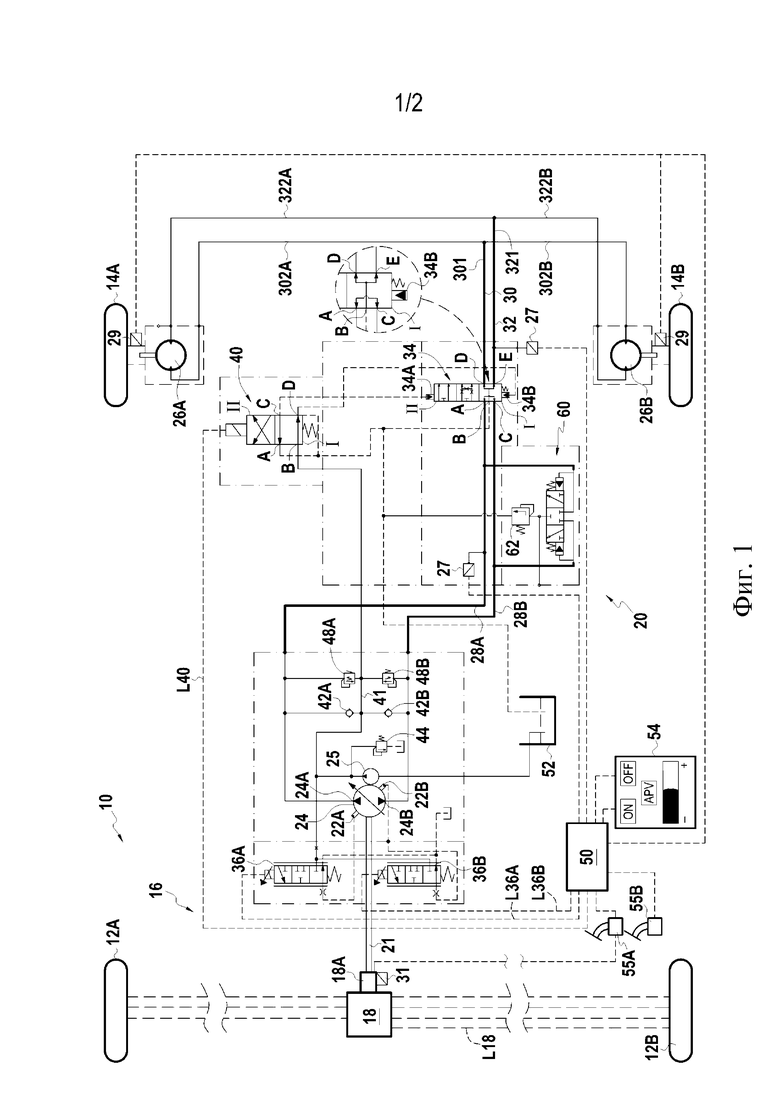
Фиг. 1 - схематичный вид устройства трансмиссии транспортного средства, позволяющего осуществлять заявленный способ.
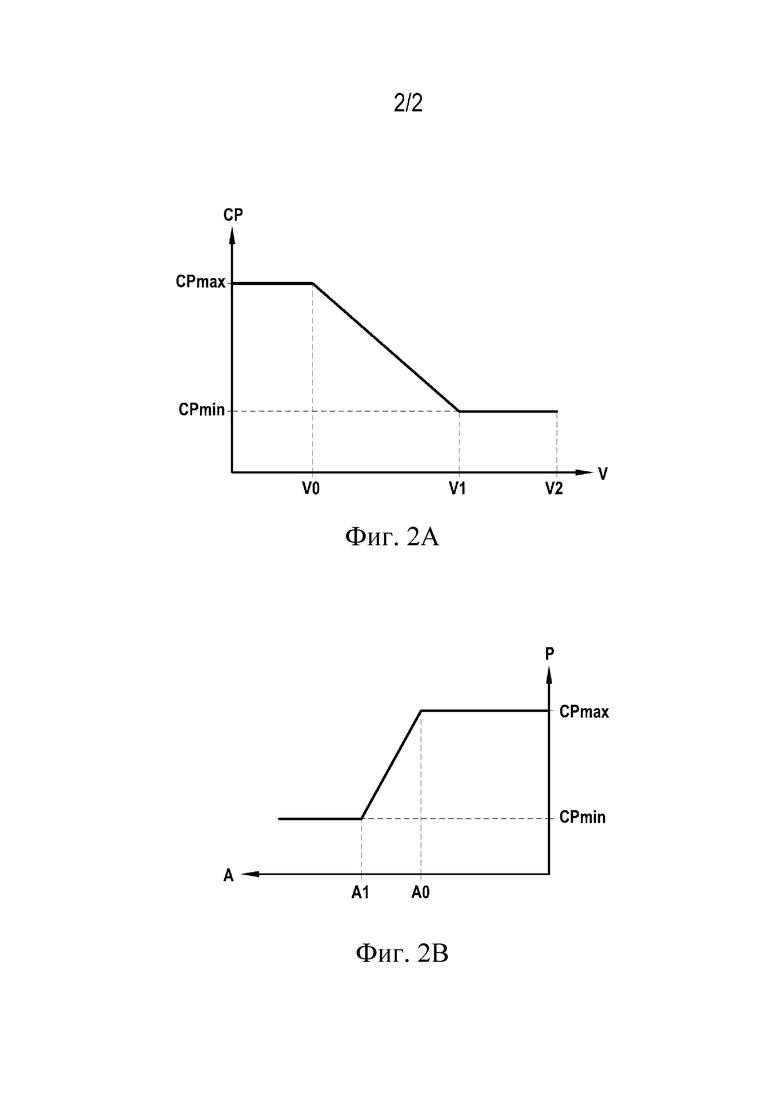
Фиг. 2А и 2В - кривые, иллюстрирующие примеры правил изменения заданного значения давления.
На фиг. 1 показано устройство трансмиссии транспортного средства 10, имеющего два задних колеса 12А, 12В и два передних колеса 14А, 14В. Приведение в движение транспортного средства в нормальном режиме обеспечивают при помощи механической трансмиссии, которая является главной трансмиссией. Эта механическая трансмиссия связывает приводной двигатель 18 с колесами 12А и 12В (например, задними колесами) и обеспечивает, таким образом, самостоятельно приведение в движение транспортного средства большую часть времени.
Двигатель 18 связан с механической трансмиссией через сцепление 18А. Он может быть двигателем внутреннего сгорания (бензиновым, GPL или другим…) или двигателем другого типа, таким как электрический или другой двигатель.
Кроме механической трансмиссии, устройство трансмиссии содержит гидравлическую трансмиссию 20, которую активируют в качестве усиления для обеспечения движения транспортного средства в трудных дорожных условиях (дорога в подъем или в горку, скользкая дорога и т.д.) или, согласно изобретению, на низкой скорости, в частности, для обеспечения трогания с места транспортного средства. Действительно, эта гидравлическая трансмиссия позволяет сделать ведущими оба колеса 14А и 14В, которые не приводятся во вращение механической трансмиссией. Таким образом, благодаря гидравлической трансмиссии 20, транспортное средство имеет рабочие режимы, в которых все четыре колеса 12А, 12В и 14А, 14В являются ведущими.
Хотя в этом варианте выполнения гидравлическое усиление применяют к передним колесам 14А и 14В, его может также применять для задних колес.
Гидравлическая трансмиссия 20 соединена с валом 21, который связан с выходом мощности двигателя 18, от которого она получает энергию и передает ее на колеса 14А, 14В, если она активирована.
В частности, гидравлическая трансмиссия содержит насос 24, который соединен с выходным валом 21 приводного двигателя 18 таким образом, чтобы этот двигатель приводил его во вращение. Этот насос 24 в дальнейшем будет также называться «главным насосом» и служит для питания гидравлических двигателей 26А и 26В, которые связаны соответственно с колесами 14А и 14В.
Главный насос 24 имеет переменный рабочий объем, в частности, является реверсивным насосом с переменным расходом типа насоса с колеблющимся дисковым кулачком, ориентация которого позволяет изменять рабочий объем насоса.
В представленном примере гидравлическая трансмиссия содержит также вспомогательный насос 25 или насос подкачки, который, как известно, служит для поддержания минимального давления подкачки в компонентах контура, чтобы избегать кавитационных явлений. Насос 25 имеет фиксированный рабочий объем, и ограничитель 44 давления ограничивает его давление нагнетания таким образом, чтобы поддерживать давление PG подкачки, например, порядка 30 бар, в трубопроводе 41 подкачки.
Главный 24 и вспомогательный 25 насосы соединены, оба, с выходным валом 21 двигателя 18 и, следовательно, приводятся им в действие одновременно. Предпочтительно, главный и вспомогательные насосы могут приводиться в действие двумя раздельными валами, или подкачку может обеспечивать электрический насосный агрегат.
Контур гидравлической трансмиссии содержит два насосных трубопровода 28А, 28В, соединенные с главными отверстиями 24А, 24В насоса 24. В зависимости от направления работы насоса 24 эти насосные трубопроводы обеспечивают соответственно подачу жидкости в гидравлические двигателя и удаление или наоборот.
Действительно, эти насосные трубопроводы 28А, 28В могут сообщаться через пусковой клапан 34 соответственно с двумя трубопроводами 30, 32 двигателей. Каждый из этих трубопроводов двигателей имеет первую часть 301, 302, выполненную с возможностью соединения с насосным трубопроводом, и вторую часть, в которой каждый из них делится на две ветви 203А, 203В и 322А, 322В соответственно, соединенные с входными и выходными камерами двигателей 26А и 26В.
Давление в том из насосных трубопроводов 28А, 28В, в котором давление является самым низким, ограничено обменным клапаном 60, связанным с ограничителем 62 давления, соединенным с резервуаром 52 без повышенного давления (с атмосферным давлением), чтобы поддерживать в насосном трубопроводе с наиболее низким давлением давление, равное калибровочному давлению ограничителя 62 давления, например, порядка 22 бар.
Следует отметить, что в гидравлической трансмиссии 20 обменный клапан 60 является факультативным.
Как известно, двигатели 26А, 26В являются, в частности, гидравлическими двигателями с радиальными поршнями, аналогичными двигателям, описанным во французском патенте №2 504 987.
Эти двигатели можно соединять или отсоединять (подключать или отключать), в частности, меняя давление в их картерах, например, как указано в европейском патенте №0 993 982.
Вместе с тем, можно предусмотреть другие типы гидравлических двигателей, например, двигатели с осевыми поршнями.
Каждый из двигателей 26А, 26В содержит выходной вал, соединенный соответственно с колесами 14А, 14В. В режима привода гидравлической трансмиссии 20 под действием разности давления, задаваемой главным насосом между насосными трубопроводами и, следовательно, между трубопроводами двигателей, двигатели 26А и 26В выдают крутящий момент, который позволяет им приводить во вращение колеса 14А, 14В.
В случае, когда разность давления, задаваемая главным насосом, меняет свое направление между насосными трубопроводами и, следовательно, между трубопроводами двигателей (давление в нагнетающем отверстии насоса 24А меньше давления в его впускном отверстии 24В), гидравлическая трансмиссия 20 переходит в режим торможения, и двигатели 26А и 26В выдают тормозящий момент, который стремится затормозить колеса 14А, 14В.
Основной функцией пускового клапана 34 является активация или деактивация гидравлической трансмиссии 20:
- в деактивированном режиме механическая трансмиссия самостоятельно обеспечивает движение транспортного средства; и
- в активированном режиме механическая трансмиссия и гидравлическая трансмиссия могут совместно приводить в движение транспортное средство. Однако в этом режиме в некоторые моменты гидравлическая трансмиссия 20 может быть неактивной (или отключенной), и двигатели не выдают крутящего момента, а именно когда устройство работает в режиме без крутящего момента, который будет описан ниже. Кроме того, можно предусмотреть рабочий режим, в котором гидравлическую трансмиссию активируют только при переключении передач, тогда как механическую трансмиссию в этот момент отключают. Однако изобретение относится, в частности, к активному режиму, когда транспортное средство движется на низкой скорости, например, ниже 5 км/час.
Клапан 34 имеет три входных канала А, В, С, два выходных канала D и Е и два положения I и II. На фиг. 1 показано также промежуточное положение, занимаемое только временно.
Кроме того, пусковой клапан 34 содержит две камеры 34А, 34В гидравлического привода.
В этом тексте термины «входной» и «выходной», применяемые к каналам клапана, обозначают наиболее частое направление циркуляции жидкости или передачи команды, хотя это не исключает и другие рабочие режимы.
Каналы А и С соединены соответственно с насосными трубопроводами 28А и 28В. Канал В соединен с резервуаром 52.
Каналы D и Е соединены соответственно с первыми частями 301 и 321 трубопроводов 30 и 32 двигателей и, следовательно, соединены соответственно с входным и выходным отверстиями двигателей 26А и 26В.
Приводные камеры 34А и 34В соединены соответственно с каналами С и D приводного клапана 40, в данном случае электроклапана, который будет описан ниже.
Пусковой клапан 34 содержит также возвратную пружину, которая стремится удерживать его в первом положении I.
В первом положении I каналы В, D и Е соединены, и каналы А и С соединены. Во втором положении II каналы А и D, соединены, каналы С и Е соединены, и канал В изолирован.
Как показывает промежуточная клетка на фиг. 1 для клапана 34, в промежуточном положении между положениями I и II четыре канала А, С, D и Е соединены через сужения, при этом канал В, наоборот, является изолированным.
Таким образом, в первом положении I клапана 34 насосные трубопроводы 28А, 28В соединены друг с другом (перепускное положение). Кроме того, трубопроводы 30 и 32 двигателя соединены друг с другом и соединены также с резервуаром 52. Следовательно, двигатели 26А и 26В являются неактивными. Их можно отключить, то есть перевести в ситуацию муфты холостого кода, различными способами.
Например, поршни гидравлических двигателей могут быть убраны в их цилиндры, как описано в европейском патенте №0 993 982. Можно также предусмотреть отсоединение роторов двигателей от их выходных органов. Например, соединение между роторами и выходными органами происходит при помощи кулачковых муфт или может быть фрикционным, и отсоединение состоит в прекращении взаимодействия кулачковых муфт или путем уменьшения трения.
Во втором положении II клапана 34 трубопроводы двигателей соединены с насосными трубопроводами и питают двигатели 26А, 26В для приведения во вращение колес 14А, 14В. Это положение соответствует активированному состоянию гидравлической трансмиссии 20.
Питание жидкостью этой трансмиссии 20 происходит следующим образом.
Когда приводной двигатель 18 вращает главный насос 24, жидкость циркулирует в насосных трубопроводах 28А и 28В в направлении питания от насоса для одного из них и в направлении нагнетания к насосу для другого.
Насосные трубопроводы 28А, 28В соединены с трубопроводом 41 подкачки через обратные клапаны 42А, 42В, чтобы давление в этих трубопроводах оставалось по меньшей мере равным давлению PG подкачки, чтобы избегать любого превышения давления.
Приводной электроклапан 40 позволяет переводить гидравлическую трансмиссию 20 в активный режим или в неактивный режим.
Этот электроклапан 40 имеет два входных канала А, В, два выходных канала С и D, два положения I, II и возвратную пружину, которая стремится удерживать его в положении I.
Канал А соединен с резервуаром 52. Канал В соединен с трубопроводом 41 подкачки. Каналы С и D соединены с приводными камерами 34А и 34В клапана 34.
В положении I электроклапана 40 его каналы А и С соединены между собой, и его каналы В и D соединены между собой, поэтому приводная камера 34В получает питание через трубопровод 41 подкачки, тогда как приводная камера 34А соединена с резервуаром. В результате клапан 34 оказывается в положении I, показанном на фиг. 1, в котором трубопроводы 30 и 32 двигателей изолированы от насосных трубопроводов, поэтому гидравлическая трансмиссия не является активной. В положении II электроклапана 40 его каналы А и D соединены между собой, и каналы В и С соединены между собой, и на этот раз питание получает камера 34А, а с резервуаром соединена камера 34В, что устанавливает клапан 34 в его положение II, приводит к соединению трубопроводов двигателей с насосными трубопроводами и, следовательно, к активации гидравлической трансмиссии.
Ранее было указано, что насос 24 имеет переменный рабочий объем. Чтобы изменять этот рабочий объем, гидравлическая трансмиссия содержит два поступательных приводных электроклапана 36А и 36, которые можно перемещать между двумя крайними положениями, в которых они соединяют с резервуаром одну из приводных камер 22А, 22В дискового кулачка насоса 24 и соединяют другую камеру с трубопроводом 41 подкачки.
Гидравлической трансмиссией 20 управляет электронный блок 50 управления, который соединен с различными электроклапанами и с различными датчиками этой трансмиссии 20 через схемы, которые показаны только частично.
Блок управления соединен с интерфейсом 54 пользователя, который позволяет водителю транспортного средства активировать или деактивировать гидравлическую трансмиссию 20. Этот интерфейс может обеспечивать различные режимы работы:
- активированная гидравлическая трансмиссия для обеспечения гидравлического усиления приводного двигателя в ситуации «нормального» вождения транспортного средства (кнопка ON),
- полностью деактивированная гидравлическая трансмиссия, чтобы транспортное средство приводилось в движение только механической трансмиссией (кнопка OFF),
- частично активированная гидравлическая трансмиссия, то есть когда обнаруживается потребность в усилении (кнопка APV).
Например, по умолчанию гидравлическая трансмиссия переходит в «активированный» режим, когда водитель включает контакт зажигания на приборной панели транспортного средства после фазы полной остановки. Это значит, что во время реального трогания с места транспортного средства гидравлическая трансмиссия будет готова обеспечить содействие для трогания с места. Если такое содействие не нужно, водитель может деактивировать гидравлическую трансмиссию при помощи кнопки OFF. Кроме того, можно предусмотреть, чтобы эта деактивация работала только для данного трогания с места или, наоборот, чтобы она приняла режим по умолчанию для следующих троганий с места, и в этом случае нажатие кнопки ON может активировать гидравлическое усиление для текущего трогания с места, или сделать так, чтобы «активированный» режим стал опять режимом по умолчанию.
Также можно предусмотреть, чтобы усиление автоматически переходило в «активированный» режим, когда транспортное средство движется на низкой скорости, тогда как амплитуда воздействия на привод акселератора не равна нулю.
«Частично активированный» режим может иметь несколько ситуаций, например, для обеспечения гидравлического усиления на низкой скорости, в частности, в качестве помощи при переключении передач.
При помощи курсора, потенциометра или аналогичного средства, показанного под кнопкой APV, водитель может выбирать интенсивность усиления, обеспечиваемого гидравлической трансмиссией, в частности, для обеспечения трогания с места.
Блок 50 управления соединен с электроклапаном 40 при помощи линии L40 управления, чтобы переводить этот электроклапан в его положение I, в котором гидравлическая трансмиссия является неактивной, или в его положение II, в котором гидравлическая трансмиссия является активной.
Через линии управления L36A и L36B блок 50 управления управляет также электроклапанами 36А и 36В, чтобы задавать рабочий объем главного насоса 24.
Кроме того, блок управления получает информацию о состоянии движения транспортного средства. В частности, он может обнаружить ситуацию низкой скорости, в частности, ситуацию трогания с места транспортного средства, в которой желательно подать команду на гидравлическое усиление с применением фазы усиления на низкой скорости.
Эта ситуация низкой скорости может быть обнаружена, когда скорость транспортного средства является низкой, например, ниже 5 км/час, тогда как включена низшая передача (в частности, первая) и задействован привод акселератора.
Ситуацию трогания с места можно обнаруживать таким же образом и, кроме того, возможно, когда первоначальная скорость транспортного средства является нулевой.
В частности, обеспечение трогания с места может быть включено при воздействии на привод акселератора транспортного средства с определенной амплитудой (например, в процентах его максимального хода, например, 5% или 10%) после остановки транспортного средства, в случае необходимости, в сочетании с воздействием на привод сцепления. Выбор включения обеспечения трогания с места только во время воздействия на привод акселератора с определенной амплитудой позволяет избежать нежелательного включения обеспечения трогания с места.
Например, с педалью акселератора транспортного средства соединен датчик 55А положения, который передает измеряемую им информацию в блок 50 управления. Точно так же, можно предусмотреть датчик 55В положения на педали сцепления. Ситуацию выключения сцепления можно также обнаруживать при помощи датчика (не показан), соединенного со сцеплением 18А.
Блок 50 управления управляет активацией и деактивацией гидравлической трансмиссии 20, переводя электроклапан 40 либо в его положение II, что приводит к установке клапана 34 в его положение II и к активации гидравлической трансмиссии, либо в его положение I, что приводит к установке клапана 34 в его положение I и к отключению гидравлической трансмиссии.
Когда гидравлическая трансмиссия активирована, двигатели 26А и 26В переходят из своей конфигурации муфты холостого хода в активную конфигурацию, что позволяет этим двигателям выдавать выходной крутящий момент (хотя, как будет показано ниже, возможен также режим работы без крутящего момента). Например, давление жидкости в трубопроводах двигателей заставляет поршни выйти из их цилиндров или, возможно, через не показанный трубопровод активации, приводит к соединению роторов двигателей с их выходными органами.
Когда гидравлическая трансмиссия деактивирована, например, чтобы прекратить фазу усиления на низкой скорости, гидравлические двигатели переходят в свою конфигурацию муфты холостого хода в обратном порядке.
Согласно изобретению, при обнаружении ситуации обеспечения трогания с места или когда на низкой скорости ощущается потребность в гидравлическом усилении, осуществляют фазу усиления на низкой скорости. Для этого устанавливают заданное значение давления для разности давления между входом питания и выходом гидравлических двигателей, осуществляют питание этих двигателей при помощи главного насоса 24 и расход этого насоса регулируют таким образом, чтобы при приведении во вращение приводным двигателем он поддерживал между крайними точками гидравлических двигателей разность давления, по существу равную этому заданному значению давления. Например, расход главного насоса можно устанавливать путем регулирования его рабочего объема.
Для этого устройство содержит датчики давления, выполненные с возможностью обнаружения давления в крайних точках гидравлических двигателей. Эти датчики могут быть расположены соответственно на трубопроводах 30 и 32 двигателей. В представленном примере используют два датчика 27 давления, соответственно расположенные на насосном трубопроводе 28А и на трубопроводе 32 двигателя, что дает тот же результат, поскольку, когда клапан 34 находится в своем активном положении II, насосный трубопровод 28А соединен с трубопроводом 30 двигателя. Датчики 27 соединены с блоком 50 управления, в который они направляют значения давления РА и РВ соответственно в крайних точках гидравлических двигателей.
Осуществляют управление по давлению, то есть изменяют рабочий объем главного насоса, чтобы получить заданную разность давления в крайних точках двигателей, автоматически регулируемую по заданному значению давления. Иначе говоря, ставится задача получения крутящего момента, задаваемого заданным значением давления.
Заданное значение давления может быть фиксированным значением давления в течение всей продолжительности фазы усиления на низкой скорости, например, 150 бар. Однако, желательно изменять заданное значение давления во время фазы усиления на низкой скорости, в частности, между максимальным значением CPmax в начале фазы усиления на низкой скорости и минимальным значением CPmin в конце этой фазы.
Это показано на фиг. 2А и 2В.
На фиг. 2А представлен пример изменения заданного значения давления, в котором это заданное значение СР зависит от скорости V транспортного средства. С момента начала фазы усиления на низкой скорости заданное значение давления фиксируется в значении CPmax и остается стабильным в этом значении, пока скорость транспортного средства не достигнет скорости V0, например, порядка 2-5 км/час. Затем, поскольку скорость продолжает повышаться, заданное значение давления уменьшается до значения CPmin, достигаемого при скорости V1, например, равно 10 км/час. Фаза усиления на низкой скорости может прекратиться, когда достигнута эта скорость V1, или может остаться активной, тогда как заданное значение давления остается в этом значении CPmin, пока не будет достигнута более высокая скорость V2 (например, 15 км/час) или пока с начала фазы усиления на низкой скорости не истечет заранее определенное общее время (например, 1 минута). На фиг. 2А уменьшение заданного значения давления СР между скоростями V0 и V1 является линейным. Разумеется, можно также предусмотреть нелинейное уменьшение.
На фиг. 2А представлен другой пример изменения заданного значения давления, в котором это заданное значение СР зависит от амплитуды А воздействия на привод акселератора транспортного средства, в частности, на педаль акселератора. В этом примере заданное значение Ср остается равным максимальному значению CPmax, пока амплитуда А превышает заранее определенную амплитуду А0. Эта амплитуда А0 является, например, процентным выражением полного хода привода акселератора, например, порядка 20%. Когда амплитуда становится меньше этой амплитуды А0, это свидетельствует о меньшей потребности в акселерации, что в принципе значит, что транспортное средство развило скорость, которую водитель считает близкой к необходимой скорости на включенной передаче. Усиление на низкой скорости может прекратиться, когда амплитуда А становится меньше этой амплитуды А0, или может продолжаться, например, пока амплитуда остается больше определенной амплитуды А1, например, 10% максимального хода. В этом последнем случае желательно, чтобы заданное значение давления СР уменьшалось между амплитудами А0 и А1, например, линейно. После достижения амплитуды А1 можно прекратить фазу усиления на низкой скорости или продолжать ее в течение определенного времени (например, 5-10 секунд) с момента достижения амплитуды А1.
В вышеупомянутых примерах получение скорости V0 или обнаружение амплитуды А0 свидетельствует о достижении промежуточного режима и о том, что можно начать уменьшение заданного значения давления.
Можно предусмотреть другие правила изменения заданного значения давления. Например, можно первоначально не поддерживать заданное значение в значении CPmax, а уменьшать его непрерывно, или постепенно увеличивать наклон его уменьшения. Можно также предусмотреть зависимость заданного значения давления от времени, например, на основе кривой, аналогичной кривой на фиг. 2А, заменив скорости V0, V1 и V2 значениями времени.
В описанных выше примерах заданное значение давления фиксируют в значении CPmax в начале фазе усиления на низкой скорости. В частности, это значение CPmax определяют по формуле f x Pmax, где Pmax является потолком заданного значения давления. Этот потолок является максимальным значением разности давления между крайними точками гидравлических двигателей, которое допускается устройством, в частности, в зависимости от особенностей гидравлических компонентов. Например, оно составляет 250 бар. Коэффициент f меньше или равен 1 и зависит от характеристик задаваемого усиления на низкой скорости.
Как было указано выше, через курсор, потенциометр или аналогичное средство водитель может выбрать интенсивность усиления на низкой скорости. Этот курсор может, например, служить для определения коэффициента f.
В качестве характеристики усиления на низкой скорости можно также выбрать амплитуду воздействия на привод акселератора в момент, когда начинается фаза усиления на низкой скорости. Например, f может быть равен 1, когда эта амплитуда превышает определенный процент максимального хода привода акселератора, причем этот процент составляет, в частности, от 20% до 40%, в частности, равен 30%.
Значение CPmin может составлять около 80 бар. Речь идет о достаточно низком давлении, чтобы не создавать значительный гидравлический момент и чтобы одновременно обеспечивать быстрое повышение давления в гидравлических трубопроводах, если в этом возникает потребность, например, в случае пробуксовки колес, вращаемых механической трансмиссией.
Как было указано выше, фазу усиления на низкой скорости можно прекратить, когда достигается достаточная скорость. Конец фазы усиления на низкой скорости может наступить также в результате других событий, в частности, когда продолжительность этой фазы достигает определенного времени, или когда выходной крутящий момент, необходимый для механической трансмиссии, уменьшается до заранее определенного значения, или когда сцепление отпускают в течение заранее определенного времени после воздействия, в частности, при трогании с места. Это время прекращения действия на сцепление может быть равно 0, то есть можно прекратить усиление на низкой скорости, в частности, когда речь идет об обеспечении трогания с места, в момент отпускания сцепления.
Чтобы прекратить фазу усиления на низкой скорости можно деактивировать гидравлические двигатели, например, отсоединив их поршни от их кулачков или переместив дисковый кулачок насоса 24 в нейтральное положение. Фазу усиления на низкой скорости можно также прекратить, переведя гидравлическую трансмиссию в ее «частично активированное» состояние, в котором двигатели выдают нулевой крутящий момент.
Действительно, как было указано выше, гидравлическая трансмиссия может быть полностью деактивированной, активированной или частично активированной.
В целом, поскольку гидравлическая трансмиссия служит усилением механической трансмиссии, она может быть активной ниже только одного предела применения. При превышении этого предела она может автоматически перейти в «деактивированное» или в «частично активированное» состояние, и интерфейс 54 пользователя может соответственно поменять состояние вышеупомянутых кнопок ON, OFF и APV.
Как указано в документе FR 1 353 043, ситуация, в которой гидравлическая трансмиссия является частично активированной, может соответствовать ее переводу в рабочий режим «без крутящего момента».
Чтобы перевести неактивные двигатели 26А и 26В в режим «без крутящего момента», клапан 34 удерживают в положении II и при помощи блока 50 управления регулируют рабочий объем насоса 24, воздействуя на вышеупомянутые электроклапаны 36А и 36В таким образом, чтобы значения давления во входном 24А и выходном 24В отверстиях были по существу одинаковыми.
Для обеспечения такого регулирования используют два вышеупомянутых датчика 27 давления, измеряя давление РА и РВ в крайних точках двигателей. На основании этих значений давления блок 50 управления меняет и регулирует значение рабочего объема насоса 24 таким образом, чтобы уравнять давления РА и РВ. Это регулирование можно осуществлять при помощи любого соответствующего алгоритма управления, например, с использованием ПИД-регуляторов или других средств.
Таким образом, в этом варианте осуществления система использует информацию о давлении, поступающую от датчиков 27 давления, чтобы определить рабочий объем насоса.
Кроме того, наиболее низкое из этих давлений (в частности, РВ, когда транспортное средство движется передним ходом) принудительно уравнивают с обменным давлением РЕ при помощи обменного клапана 60.
В предыдущем примере изобретение было представлено в варианте выполнения с двумя параллельно установленными двигателями 26А и 26В. Естественно, изобретение можно применять при любом числе этих двигателей и независимо от их конфигурации (последовательной, параллельной или их комбинации), поскольку блок управления определяет выходную скорость приводного двигателя 18 и управляет рабочим объемом главного насоса 24, как было указано выше.
Как было описано выше, показанное на фиг. 1 устройство, которое использует датчики 27 давления, позволяет осуществлять управление при помощи давления.
В представленном примере это устройство содержит также датчики 29 скорости, измеряющие выходную скорость гидравлических двигателей или скорость вращаемых ими колес.
В зависимости от применяемого варианта управления можно предусматривать одновременное наличие датчиков 27 и 29 или использовать только одну из этих категорий датчиков. Например, как указано в документе FR 1 353 043, можно сделать так, что, когда гидравлическая трансмиссия является частично активированной, эта трансмиссия не производит никакого крутящего момента. Это представляет интерес вне ситуаций включения сцепления или усиления на низкой скорости, или в любой ситуации, в которой усиление не требуется.
В этом случае блок 50 управления может определить рабочий объем насоса таким образом, чтобы выходной крутящий момент гидравлических двигателей был по существу нулевым, на основании данных скорости вращения колес или гидравлических двигателей, поступающих от датчиков 29, или данных скорости вращения ротора насоса 24, поступающих от датчика 31. Для этого рабочий объем насоса рассчитывают таким образом, чтобы скорость вращения выходных валов гидравлических двигателей 26А, 26В, вычисляемая на основании скорости вращения ротора насоса 24 и соответствующих рабочих объемов насоса и двигателей, была равна реальной скорости вращения выходных валов двигателей 26А, 26В (то есть скорости вращения колес 14А, 14В), измеряемой датчиками 29.
Действительно, скорость вращения вала насоса 24 в сочетании с его рабочим объемом определяет расход жидкости, нагнетаемой насосом 24 в сторону двигателей 26А, 26В. Из этого расхода выводят скорость вращения выходных валов двигателей с учетом их рабочего объема.
Выбрав рабочий объем насоса, который делает скорость вращения выходных валов двигателей 26А, 26В равной скорости вращения колес 14А, 14В, блок 50 управления управляет насосом 24 таким образом, чтобы значения давления жидкости во входном и выходном отверстиях двигателей 26А, 26В оставались по существу равными и чтобы двигатели 26А, 26В не выдавали никакого крутящего момента на свой выходной вал.
Разумеется, связь между блоком 50 управления и различными органами, которыми он управляет, передавая в них информацию или получая от них информацию, можно реализовать при помощи любого соответствующего средства передачи информации, проводного или другого.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ГИДРАВЛИЧЕСКОЙ ТРАНСМИССИИ | 2014 |
|
RU2650339C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2015 |
|
RU2673306C1 |
| АВТОМАТИЧЕСКАЯ ТРАНСМИССИЯ И СПОСОБ ЕЕ ГИДРАВЛИЧЕСКОГО УПРАВЛЕНИЯ | 2011 |
|
RU2505724C1 |
| Способ и система для замедления транспортного средства | 2017 |
|
RU2717608C2 |
| СПОСОБ КОНТРОЛЯ ПРОЦЕССА ТРОГАНИЯ С МЕСТА ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2425766C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2508487C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ТРАНСМИССИОННОГО МЕХАНИЗМА | 2011 |
|
RU2509243C1 |
| СПОСОБ УПРАВЛЕНИЯ МЕХАНИЧЕСКИМ СРЕДСТВОМ СОЕДИНЕНИЯ ОСЕЙ СИСТЕМЫ ТРАНСМИССИИ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2570927C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ РЕМЕННОЙ БЕССТУПЕНЧАТО РЕГУЛИРУЕМОЙ ТРАНСМИССИЕЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2505727C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2015 |
|
RU2663257C1 |
Изобретение относится к способу управления устройством комбинированной трансмиссии. Устройство содержит приводной двигатель (18), механическую трансмиссию (16) и гидравлическую трансмиссию (20), имеющую насос (24) и n гидравлических двигателей (26А, 26В). Насос выполнен с возможностью своего приведения во вращение приводным двигателем для питания жидкостью гидравлических двигателей. Осуществляют фазу усиления на низкой скорости, во время которой, когда транспортное средство движется при помощи механической трансмиссии, устанавливают заданное значение давления для разности давления между входом питания и выходом гидравлических двигателей, осуществляют питание гидравлических двигателей при помощи насоса, обнаруживают разность давления между входом питания и выходом (28А, 28В) гидравлических двигателей (26А, 26В) и регулируют расход насоса таким образом, чтобы указанная разность была по существу равна указанному заданному значению давления. Достигается повышение проходимости ТС. 2 н. и 13 з.п. ф-лы, 3 ил.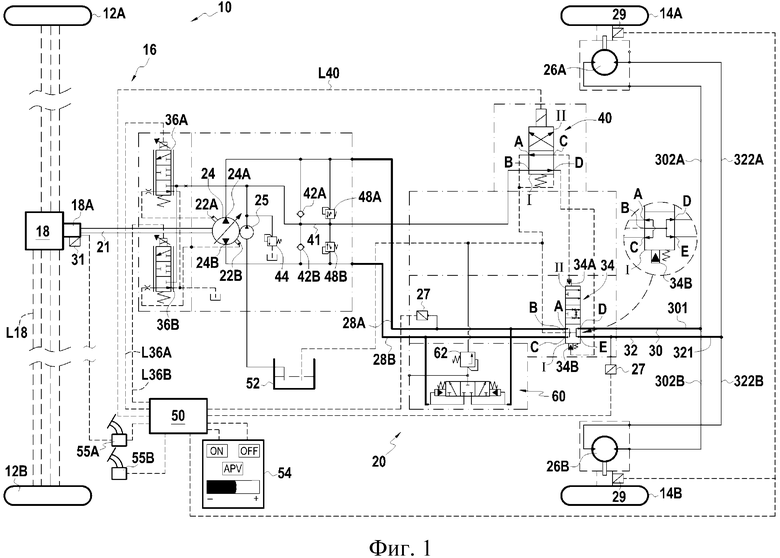
1. Способ управления устройством трансмиссии транспортного средства, при этом устройство содержит приводной двигатель (18), механическую трансмиссию (16), соединенную с приводным двигателем, и гидравлическую трансмиссию (20), имеющую насос (24) и n гидравлических двигателей (26А, 26В), при этом n превышает или равно 1, при этом насос выполнен с возможностью своего приведения во вращение приводным двигателем для питания жидкостью гидравлических двигателей,
отличающийся тем, что осуществляют так называемую фазу усиления «на низкой скорости», во время которой, когда транспортное средство движется при помощи механической трансмиссии, устанавливают заданное значение давления (СР) для разности давления между входом питания и выходом гидравлических двигателей, осуществляют питание гидравлических двигателей при помощи насоса, обнаруживают разность давления между входом питания и выходом (28А, 28В) гидравлических двигателей (26А, 26В) и регулируют расход насоса таким образом, чтобы указанная разность была по существу равна указанному заданному значению давления.
2. Способ по п. 1, отличающийся тем, что обнаруживают ситуацию трогания с места транспортного средства при помощи механической трансмиссии и осуществляют фазу усиления на низкой скорости для обеспечения трогания с места.
3. Способ по п. 2, отличающийся тем, что при обнаружении ситуации трогания с места средства обеспечения трогания с места остаются неактивированными, пока амплитуда привода (55А) акселератора транспортного средства не достигнет целевой амплитуды.
4. Способ по любому из пп. 1-3, отличающийся тем, что фазу усиления на низкой скорости прекращают, когда происходит по меньшей мере одно из следующих событий:
параметр, характеризующий скорость транспортного средства, достигает заранее заданного значения,
продолжительность фазы усиления на низкой скорости достигает заранее заданного значения времени,
выходной крутящий момент, необходимый для механической трансмиссии, уменьшается до заранее заданного значения,
сцепление, соединяющее механическую трансмиссию с приводным двигателем, отпускают после заранее заданного времени, которое равно 0, после его приведения в действие.
5. Способ по п. 1, отличающийся тем, что заданное значение давления (СР) меняют во время фазы усиления на низкой скорости.
6. Способ по п. 5, отличающийся тем, что во время фазы усиления на низкой скорости заданное значение давления (СР) уменьшают от максимального значения CPmax до минимального значения CPmin, причем это минимальное значение CPmin достигают в конце фазы усиления на низкой скорости.
7. Способ по п. 6, отличающийся тем, что определяют потолок заданного значения давления Pmax и определяют максимальное заданное значение давления CPmax в соответствии с отношением CPmax = f x Pmax, при этом коэффициент f меньше или равен 1 и зависит от задаваемых характеристик усиления на низкой скорости, таких как амплитуда воздействия на привод акселератора транспортного средства.
8. Способ по п. 7, отличающийся тем, что коэффициент f равен 1, когда амплитуда воздействия на привод (55А) акселератора по меньшей мере равна заранее определенному проценту полного хода указанного привода, при этом указанный заранее определенный процент составляет, в частности, от 20% до 40%, в частности, равен 30%.
9. Способ по любому из пп. 6-8, отличающийся тем, что заданное значение давления (СР) поддерживают в максимальном значении CPmax с начала фазы усиления на низкой скорости до момента, когда приведение в движение транспортного средства достигает определенного промежуточного режима, затем заданное значение давления уменьшают до минимального значения CPmin, достигаемого в конце фазы усиления на низкой скорости.
10. Способ по п. 9, отличающийся тем, что заданное значение давления (СР) уменьшают в соответствии с заданным правилом изменения, в частности с правилом линейного изменения.
11. Способ по п. 9 или 10, отличающийся тем, что промежуточного режима достигают, когда параметр, характеризующий скорость транспортного средства, достигает заданного промежуточного значения.
12. Способ по п. 1, отличающийся тем, что разрешают или не разрешают активацию усиления на низкой скорости.
13. Способ по п. 1, отличающийся тем, что во время фазы усиления на низкой скорости расход насоса (24) регулируют, изменяя рабочий объем указанного насоса.
14. Способ по п. 1, отличающийся тем, что осуществляют переход между фазой усиления на низкой скорости и фазой гидравлического усиления, в которой расход насоса (24) определяют в зависимости от выходной скорости механической трансмиссии.
15. Транспортное средство, содержащее устройство трансмиссии, управляемое при помощи способа по п. 1.
| US 3374847 A, 26.03.1968 | |||
| US 2007101709 A1, 10.05.2007 | |||
| Вспомогательный тяговый привод для одного или нескольких неприводных колес транспортного средства с главным приводом по крайней мере на одну пару колес | 1979 |
|
SU1263201A3 |
| Трансмиссия транспортного средства | 1985 |
|
SU1298103A1 |
| Транспортное средство | 1986 |
|
SU1324877A1 |

