Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления движением и способу управления движением, которые способствуют смене полосы движения транспортного средства.
Уровень техники
[0002] Когда есть намерение выполнить смену полосы движения с полосы движения, по которой транспортное средство движется, далее в данном документе называемой собственной полосой движения, на соседнюю полосу движения, существующие технологии управляли позицией транспортного средства согласно модели пружина-масса-амортизатор в качестве математической модели, которая схематизирует движение механической системы с помощью соответствующих элементов: пружины, массы и амортизатора, так чтобы транспортное средство приводилось в оптимальную позицию между транспортными средствами на соседней полосе движения, и предоставляется возможность выполнения изменения полосы движения во время, когда расстояние между транспортными средствами на соседней полосе движения становится равным или больше порогового значения, в то время как транспортное средство находится в текущей позиции (см. патентную литературу 1).
Список библиографических ссылок
Патентные документы
[0003] PTL 1: Японский патент № 4366419
Сущность изобретения
Техническая задача
[0004] Однако, в случае принятия во внимание только расстояния между транспортными средствами, которое служит в качестве цели для смены полосы движения транспортного средства при смене полос движения с собственной полосы движения на соседнюю полосу движения, была проблема в том, что транспортное средство продолжает ожидать в позиции, поперечной относительно расстояния между транспортными средствами, даже если другое пространство между транспортными средствами доступно для смены полосы движения.
Настоящее изобретение сфокусировано на моменте, который описан выше, и задачей изобретения является недопущение продолжения ожидания транспортным средством в позиции, поперечной относительно того же расстояния между транспортными средствами, независимо от ситуации на соседней полосе движения при смене полос движения с собственной полосы движения на соседнюю полосу движения.
Решение задачи
[0005] Для того, чтобы разрешать вышеописанную проблему, согласно одному аспекту настоящего изобретения, предоставляется устройство управления движением, выполненное с возможностью получать, в позиции сбоку от транспортного средства на соседней полосе движения, соседней по отношению к полосе движения, по которой транспортное средство движется, первого расстояния между транспортными средствами, которое служит в качестве цели для смены полосы движения транспортного средства и является расстоянием между транспортными средствами между первым движущимся впереди транспортным средством в боковом переднем направлении транспортного средства и первым движущимся следом соседним транспортным средством в боковом заднем направлении транспортного средства. Устройство управления движением выполнен с возможностью получать второе расстояние между транспортными средствами, которое является, по меньшей мере, одним расстоянием между транспортными средствами из расстояния между транспортными средствами между первым движущимся следом соседним транспортным средством и вторым движущимся следом соседним транспортным средством в качестве транспортного средства, следующего за первым движущимся следом соседним транспортным средством, и расстояния между транспортными средствами между первым движущимся впереди соседним транспортным средством и вторым движущимся впереди соседним транспортным средством в качестве транспортного средства, движущегося впереди первого движущегося впереди соседнего транспортного средства. Возможность смены полосы движения с полосы движения, по которой транспортное средство движется, на соседнюю полосу движения определяется с помощью первого расстояния между транспортными средствами. Когда смена полосы движения с полосы движения, по которой транспортное средство движется, на соседнюю полосу движения определяется как невыполнимая, наличие или отсутствие возможности того, что первое расстояние между транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения, определяется с помощью второго расстояния между транспортными средствами. Когда определяется, что существует возможность того, что первое расстояние между транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения, ожидание определяется как необходимое. Когда определяется, что не существует возможности того, что первое расстояние между транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения, ожидание определяется как излишнее.
Преимущества изобретения
[0006] Согласно одному аспекту настоящего изобретения, транспортное средство не продолжает ожидать в позиции сбоку от того же пространства между транспортными средствами, и может двигаться в позицию сбоку от другого расстояния между транспортными средствами, когда рассматриваемое транспортное средство может менять полосы движения в другое пространство между транспортными средствами.
Краткое описание чертежей
[0007] Фиг. 1 - это схема, изображающая структурный пример транспортного средства;
Фиг. 2 - это концептуальная схема устройства управления движением;
Фиг. 3 - это схема для иллюстрации окружающей обстановки для смены полосы движения (ситуации дорожного движения);
Фиг. 4 - это блок-схема последовательности операций для иллюстрации смены полосы движения с высокоскоростной полосы движения транспортных средств на низкоскоростную полосу движения транспортных средств;
Фиг. 5A - это схема для иллюстрации ситуации ожидания до тех пор, когда движущееся следом соседнее транспортное средство предоставит пространство, а фиг. 5B - это схема для иллюстрации ситуации движения вперед без ожидания;
Фиг. 6 - это схема для иллюстрирования состояния, в котором движущееся следом соседнее транспортное средство предоставило пространство;
Фиг. 7 - это блок-схема последовательности операций для иллюстрации смены полосы движения с низкоскоростной полосы движения транспортных средств на высокоскоростную полосу движения транспортных средств;
Фиг. 8A - это схема для иллюстрации ситуации ожидания до тех пор, когда движущееся впереди соседнее транспортное средство предоставит пространство, а фиг. 8B - это схема для иллюстрации ситуации движения вперед без ожидания; и
Фиг. 9 - это схема для иллюстрирования состояния, в котором движущееся впереди соседнее транспортное средство предоставило пространство.
Подробное описание вариантов осуществления
[0008] Далее в данном документе, варианты осуществления настоящего изобретения будут описаны со ссылкой на сопровождающие чертежи.
(Структура)
Как изображено на фиг. 1, транспортное средство включает в себя рабочий переключатель 1 управления, датчик 2 скорости колеса, наружное распознающее устройство 3, устройство 4 связи, устройство 5 управления движением, контроллер 6 тормоза, контроллер 7 приведения в движение/рулевого управления, контур 8 давления текучей среды, тормозное устройство 9, устройство 10 приведения в движение/рулевого управления и колеса 11.
Рабочий переключатель 1 управления является средством управления для инструктирования начала и окончания операции автоматического управления движением, включающего в себя управление движением в колонне и управление ACC-движением (управление движением со следованием за движущимся впереди транспортным средством), или инструктирования изменения установленной скорости транспортного средства для управления движением. Состояние рабочего переключателя управления выводится в устройство 5 управления движением. Рабочий переключатель 1 управления, например, предусматривается на рулевом колесе.
[0009] При этом, движение в колонне должно быть движением посредством формирования группы сопровождения с множеством транспортных средств. Когда транспортное средство не является ведущим транспортным средством в автоколонне, к которой транспортное средство принадлежит, управление движением выполняется так, чтобы поддерживать целевое время между транспортными средствами относительно транспортного средства, движущегося перед ним. Управление ACC-движением также выполняет управление движением так, чтобы поддерживать целевое время между транспортными средствами относительно движущегося впереди транспортного средства. Однако, в управлении движением в колонне, управление выполняется так, что время между транспортными средствами короче времени в управлении ACC-движением, принимая во внимание эффективность дорожного движения. При фокусировании только на управлении движением следом, управление движением в колонне является таким же, что и управление ACC-движением с точки зрения выполнения управления движением так, чтобы поддерживать целевое время между транспортными средствами.
Датчик 2 скорости колеса определяет скорость колеса и выводит информацию об определенной скорости колеса в устройство 5 управления движением. Датчик 2 скорости колеса формируется, например, посредством генератора импульсов, такого как кодовый датчик угла поворота для измерения импульсов скорости колеса.
[0010] Наружное распознающее устройство 3 распознает движущееся впереди транспортное средство, находящееся спереди транспортного средства, и, в качестве состояния распознанного движущегося впереди транспортного средства, обнаруживает наличие или отсутствие движущегося впереди транспортного средства и его состояние движения. Информация, относящаяся к состоянию обнаруженного движущегося впереди транспортного средства, выводится в устройство 5 управления движением. Наружное распознающее устройство 3 формируется, например, посредством лазерного дальномера, лазерного сканера или камеры.
Устройство 4 связи выполняет связь между транспортными средствами с другим транспортным средством(ами) вокруг транспортного средства. Устройство 4 связи может выполнять связь дорога-транспортное средство с придорожным устройством. Например, устройство 4 связи может быть комбинацией устройства связи для выполнения связи между транспортными средствами и устройством связи для выполнения связи дорога-транспортное средство. Устройство 4 связи выполняет связь между транспортными средствами с движущимся впереди транспортным средством(ами) и движущимся следом транспортным средством(ами), находящимися в предварительно заданном диапазоне, чтобы передавать и принимать идентифицирующую информацию для выполнения движения в колонне, и выводит идентифицирующую информацию, полученную от движущегося впереди транспортного средства(ств) и движущегося следом транспортного средства(ств), в устройство 5 управления движением. Информация о движении движущегося впереди транспортного средства(ств) и движущегося следом транспортного средства(ств) может быть получена через устройство 4 связи.
[0011] Когда определяется, что рабочий переключатель 1 управления включен (запрос операции управления), устройство 5 управления движением выполняет управление движением для движения следом и движения в колонне относительно движущегося впереди транспортного средства(ств) на основе рабочего состояния рабочего переключателя 1 управления, скорости транспортного средства на основе сигнала от датчика 2 скорости колеса, информации, относящейся к состоянию движения движущегося впереди транспортного средства(ств), обнаруженного посредством наружного распознающего устройства 3, и идентифицирующей информации, полученной посредством устройства 4 связи.
Когда определяется, что запрос операции движения в колонне в рабочем переключателе 1 управления включен (запрос операции управления), устройство 5 управления движением выполняет связь между транспортными средствами с движущимся впереди транспортным средством(ми) и движущимся следом транспортным средством(ми), находящимися в предварительно заданном диапазоне, чтобы определять, переходить ли в состояние движения в колонне. Когда определяется переход в состояние движения в колонне, устройство 5 управления движением выполняет обработку для управления движением в колонне. Другими словами, устройство 5 управления движением выполняет управление движением в колонне на основе информации о состоянии движения транспортного средства, информации обнаружения движущегося впереди транспортного средства посредством наружного распознающего устройства 3 и информации других транспортных средств, окружающих транспортное средство, полученной от устройства 4 связи. Кроме того, когда определяется, что запрос операции ACC-движения в рабочем переключателе 1 управления включен (запрос операции управления), устройство 5 управления движением выполняет управление ACC-движением на основе информации о состоянии движения транспортного средства и информации обнаружения движущегося впереди транспортного средства посредством наружного распознающего устройства 3. Хотя управление ACC-движением может использовать информацию о движении движущегося впереди транспортного средства посредством получения информации через связь между транспортными средствами.
[0012] При выполнении управления ACC-движением устройство 5 управления движением выполняет управление движением следом с помощью, в качестве целевого времени между транспортными средствами, времени между транспортными средствами на основе расстояния между транспортными средствами, заданного пассажиром, или предварительно заданного времени между транспортными средствами для ACC-движения. Кроме того, при выполнении обработки для управления движением в колонне, устройство 5 управления движением выполняет управление движением следом относительно движущегося впереди транспортного средства, так, чтобы поддерживать целевое время между транспортными средствами для движения в колонне, когда транспортное средство не является ведущим транспортным средством. Целевое время между транспортными средствами для движения в колонне, например, задается меньше целевого времени между транспортными средствами во время ACC-управления. Устройство 5 управления движением выводит каждое командное значение (величину управления тормозной и движущей силой) команды торможения или команды приведения в движение, вычисленное для вышеупомянутого управления движением следом, в контроллер 6 тормоза и контроллер 7 приведения в движение/рулевого управления. Дополнительно, устройство 5 управления движением выводит команду рулевого управления в контроллер 7 приведения в движение/рулевого управления, когда рулевое управление транспортным средством необходимо.
[0013] Контроллер 6 тормоза и контроллер 7 приведения в движение/рулевого управления, соответственно, принимают командные значения (величины управления тормозной и движущей силой) команды торможения или команды приведения в движение от устройства 5 управления движением в качестве верхнего контроллера, и управляют ускорением/замедлением транспортного средства так, чтобы следовать соответствующим принятым командным значениям (величинам управления тормозной и движущей силой). Контроллер 6 тормоза и контроллер 7 приведения в движение/рулевого управления формируют устройство управления ускорением/замедлением.
Контроллер 6 тормоза управляет тормозной силой, формируемой тормозным устройством 9, до значения, соответствующего соответствующим командным значениям (величинам управления тормозной и движущей силой) от устройства 5 управления движением, с помощью контура 8 давления текучей среды. Контур 8 давления текучей среды регулирует давление текучей среды, которая течет в тормозное устройство 9 согласно управляющей команде от контроллера 6 тормоза. Контур 8 давления текучей среды включает в себя трубки и регулирующий клапан, соединенный с тормозным устройством 9, также как и тормозной цилиндр. Тормозное устройство 9 предусматривается на колесах 11 и помещает тормоз на колеса 11 типично с помощью силы трения. В качестве тормозного устройства 9, гидравлический дисковый тормоз, как правило, доминирует, а другие известные его примеры включают в себя барабанный тормоз, стояночный (ручной) тормоз, тормоз воздушного типа и тормоз-замедлитель в выпускной системе двигателя. Другими словами, тормозная жидкость (масло), сжатый воздух или т.п. типично используется в качестве текучей среды. Кроме того, тормозное устройство 9 не ограничивается устройством, применяющую тормозную силу посредством давления текучей среды, и может быть электрическим тормозным устройством или т.п. Контроллер 6 тормоза, контур 8 давления текучей среды и тормозное устройство 9 формируют устройство торможения, которое формирует тормозную силу.
[0014] Контроллер 7 приведения в движение/рулевого управления управляет крутящим моментом (движущей силой), формируемым посредством источника приведения в движение устройства 10 приведения в движение/рулевого управления согласно соответствующим командным значениям (величинам управления тормозной и движущей силой) от устройства 5 управления движением. Источник приведения в движение устройства 10 приведения в движение/рулевого управления формирует движущую силу (крутящий момент приведения в движение), чтобы вращать колеса 11. Источник приведения в движение устройства 10 приведения в движение/рулевого управления не ограничивается типичным двигателем и может быть электромотором или гибридной структурой в качестве комбинации двигателя и мотора. Дополнительно, контроллер 7 приведения в движение/рулевого управления управляет механизмом рулевого управления устройства 10 приведения в движение/рулевого управления согласно команде рулевого управления от устройства 5 управления движением, чтобы изменять направления колес 11. В целом, источник приведения в движение и механизм рулевого управления устройства 10 приведения в движение/рулевого управления не зависят друг от друга. Настоящий вариант осуществления будет совокупно описывать источник приведения в движение и механизм рулевого управления для того, чтобы упрощать описание. При этом, FF-транспортное средство (транспортное средство с расположенным впереди двигателем, передним приводом) предполагается в качестве транспортного средства, но в действительности, транспортное средство может быть FR-транспортным средством (транспортным средством с расположенным впереди двигателем, задним приводом), 4WD (транспортное средство с приводом на четыре колеса) или т.п. Очевидно, транспортное средство может также быть промежуточным транспортным средством. Альтернативно, транспортное средство может быть транспортным средством с вспомогательным мотором, в котором колеса одной стороны из передних и задних колес приводятся во вращение посредством движущей силы от двигателя, а колеса другой его стороны приводятся во вращение, при необходимости, посредством движущей силы от электромотора через муфту сцепления, как в e4WD (зарегистрированная торговая марка).
[0015] (Детали устройства управления движением)
Как изображено на фиг. 2, устройство 5 управления движением согласно настоящему варианту осуществления включает в себя блок 51 установки состояния управления, блок 52 определения состояния обнаружения окружающих транспортных средств, блок 53 вычисления скорости окружающих транспортных средств, блок 54 определения необходимости смены полосы движения, блок 55 получения первого расстояния между транспортными средствами, блок 56 получения второго расстояния между транспортными средствами, блок 57 определения возможности смены полосы движения и блок 58 определения необходимости ожидания. Примером устройства 5 управления движением, как предполагается, является электронное устройство управления (ECU), которое устанавливается в транспортном средстве. Кроме того, поскольку электронное устройство управления (ECU), как правило, неотделимо от транспортного средства, устройство 5 управления движения может читаться как транспортное средство.
[0016] Блок 51 установки состояния управления определяет состояние рабочего переключателя 1 управления, задействуемого пассажиром, и на основе рабочего состояния рабочего переключателя 1 управления определяет наличие или отсутствие различных видов операций переключения для рабочего управления. При этом, когда определяется, что движение в колонне будет выполняться, блок 51 установки состояния управления устанавливает скорость транспортного средства для транспортного средства согласно целевому времени между транспортными средствами для движения в колонне во время движения следом. В это время, операционная команда может быть выведена в блок 52 определения состояния обнаружения окружающих транспортных средств. Кроме того, когда существование какого-либо движущегося впереди транспортного средства не обнаруживается во время ACC-движения, установленная скорость транспортного средства, как предполагается, будет командным значением скорости транспортного средства. Когда транспортное средство является ведущим транспортным средством во время движения в колонне, установленная скорость транспортного средства для движения в колонне, как предполагается, будет командным значением скорости транспортного средства. Другими словами, вышеописанная установленная скорость транспортного средства необязательно является одинаковой между моментом во время управления ACC-движением и во время управления движением в колонне.
[0017] Блок 52 определения состояния обнаружения окружающих транспортных средств, при необходимости или при приеме операционной команды от блока 51 установки состояния управления, определяет наличие или отсутствие других транспортных средств вокруг транспортного средства на основе относительных параметров между транспортными средствами между другими транспортными средствами вокруг транспортного средства и транспортным средством, полученных от устройства обнаружения транспортных средств, установленного в транспортном средстве. При этом, относительный параметр между транспортными средствами в настоящем варианте осуществления включает в себя расстояние между транспортными средствами относительно транспортного средства и относительную скорость по отношению к нему. Например, с помощью наружного распознающего устройства 3 (камеры, лазера, радара или т.п.) или устройства 4 связи (связи между транспортными средствами, связи дорога-транспортное средство или т.п.), блок 52 определения состояния обнаружения окружающих транспортных средств получает относительный параметр между транспортными средствами (расстояние между транспортными средствами и относительную скорость по отношению к транспортному средству) и определяет наличие или отсутствие движущегося впереди соседнего транспортного средства в боковом переднем направлении транспортного средства и движущегося следом соседнего транспортного средства в боковом заднем направлении транспортного средства на соседней полосе движения. Очевидно, также возможно определять наличие или отсутствие движущегося впереди транспортного средства спереди транспортного средства и движущегося следом транспортного средства сзади транспортного средства на собственной полосе движения, но описание случая будет опущено. Кроме того, блок 52 определения состояния обнаружения окружающих транспортных средств может быть приспособлен обнаруживать позиции транспортного средства (позиционную информацию) для других транспортных средств вокруг транспортного средства посредством GPS, сопоставления карты с помощью цифровой картографической базы данных и камеры или лазера или измерения позиции транспортного средства с помощью магнитного маркера или т.п., расположенного на траектории движения. Кроме того, блок 52 определения состояния обнаружения окружающих транспортных средств может непосредственно получать позиции транспортных средств для других транспортных средств вокруг транспортного средства через устройство 4 связи (связь между транспортными средствами, связь дорога-транспортное средство или т.п.). При этом, собственная полоса движения - это полоса движения (путь движения), где транспортное средство в настоящее время движется. Кроме того, соседняя полоса движения - это полоса движения, которая находится рядом с собственной полосой движения, и которая является полосой движения, которая будет местом назначения для перемещения туда транспортного средства. Дополнительно, блок 52 определения состояния обнаружения окружающих транспортных средств может быть приспособлен работать, только когда он принял операционную команду от блока 54 определения необходимости смены полосы движения, который будет описан позже.
[0018] Когда другие транспортные средства вокруг транспортного средства обнаруживаются посредством блока 52 определения состояния обнаружения окружающих транспортных средств, блок 53 вычисления скорости окружающих транспортных средств вычисляет, для каждого обнаруженного транспортного средства, скорость каждого транспортного средства на основе относительной скорости каждого транспортного средства относительно скорости транспортного средства. Другими словами, скорость каждого транспортного средства является оцениваемым значением. Блок 53 вычисления скорости окружающих транспортных средств может быть приспособлен, если необходимо, чтобы вычислять скорость транспортного средства с помощью датчика 2 скорости колеса. Кроме того, блок 53 вычисления скорости окружающих транспортных средств может получать скорость каждого транспортного средства через устройство 4 связи (связи между транспортными средствами, связи дорога-транспортное средство или т.п.). Дополнительно, блок 53 вычисления скорости окружающих транспортных средств может проверять скорость транспортного средства и скорость соседнего транспортного средства на соседней полосе движения, чтобы проверять, является ли собственная полоса движения полосой движения с более высокой скоростью или полосой движения с более низкой скоростью, чем соседняя полоса движения.
[0019] Блок 54 определения необходимости смены полосы движения определяет, выполнять или нет смену полосы движения с собственной полосы движения на соседнюю полосу движения. Например, блок 54 определения необходимости смены полосы движения определяет необходимость смены полосы движения транспортного средства, когда обнаруживается желание (намерение) изменить полосы движения посредством управления рабочим переключателем 1 управления, указателем направления, рулевым колесом или т.п. пассажиром. Альтернативно, когда обнаруживается приближение к "другому транспортному средству около упомянутого транспортного средства" посредством наружного обнаруживающего устройства 3 (камеры, лазера, радара или т.п.), устройство 4 связи (связи между транспортными средствами, связи дорога-транспортное средство или т.п.), или т.п., блок 54 определения необходимости смены полосы движения может определять смену полосы движения транспортного средства. Важные примеры случая приближения транспортного средства к другому транспортному средству вокруг него включают в себя замедление движущегося впереди транспортного средства на собственной полосе движения (приближение к движущемуся впереди транспортному средству), ускорение движущегося следом транспортного средства на собственной полосе движения (приближение к движущемуся следом транспортному средству), и боковое перемещение транспортного средства (приближение к движущемуся впереди соседнему транспортному средству или движущемуся следом соседнему транспортному средству на соседней полосе движения). Кроме того, блок 54 определения необходимости смены полосы движения может определять смену полос движения, когда определяет, что предпочтительно двигаться по соседней полосе движения вместо собственной полосы движения, проверяя скорость транспортного средства и скорости других транспортных средств вокруг транспортного средства. Дополнительно, когда обнаруживается приближение к "белой линии на границе между собственной полосой движения и соседней полосой движения" посредством камеры или т.п., блок 54 определения необходимости смены полосы движения может определять смену полосы движения транспортного средства. Когда определяется необходимость смены полосы движения транспортного средства, блок 54 определения необходимости смены полосы движения выводит операционную команду, по меньшей мере, одному из блока 52 определения состояния обнаружения окружающих транспортных средств, блока 55 получения первого расстояния между транспортными средствами (и блока 56 получения второго расстояния между транспортными средствами) и блока 57 определения возможности смены полосы движения. Кроме того, в случае продолжения определения возможности смены полосы движения для транспортного средства во все моменты времени (безусловно) во время движения транспортного средства независимо от желания (намерения) изменить полосы движения и необходимости для смены полосы движения, блоку 54 определения необходимости смены полосы движения не нужно функционировать. В этом случае, блок 54 определения необходимости смены полосы движения не требуется.
[0020] Блок 55 получения первого расстояния между транспортными средствами получает "первое расстояние между транспортными средствами", представляющее расстояние между транспортными средствами (ширину целевого пространства), которое служит в качестве цели для смены полосы движения транспортного средства на основе расстояния между транспортными средствами (или позиции транспортного средства), полученной посредством блок 52 определения состояния обнаружения окружающих транспортных средств. Например, первое расстояние между транспортными средствами является расстоянием между транспортными средствами между двумя соседними транспортными средствами, расположенными в боковом переднем направлении и боковом заднем направлении транспортного средства на соседней полосе движения. При этом, блок 55 получения первого расстояния между транспортными средствами получает "расстояние между движущимися сбоку соседними транспортными средствами" в качестве первого расстояния между транспортными средствами. Расстояние между движущимися сбоку соседними транспортными средствами является расстоянием между транспортными средствами между первым движущимся впереди соседним транспортным средством в боковом переднем направлении транспортного средства и первым движущимся следом соседним транспортным средством в боковом заднем направлении транспортного средства на соседней полосе движения. Однако, фактически, первое расстояние между транспортными средствами не ограничивается расстоянием между движущимися сбоку соседними транспортными средствами. Например, блок 55 получения первого расстояния между транспортными средствами может быть приспособлен, чтобы получать предварительно (заранее) расстояние между транспортными средствами, которое может быть "расстоянием между движущимися сбоку транспортными средствами" поблизости на соседней полосе движения, в качестве первого расстояния между транспортными средствами. Блок 55 получения первого расстояния между транспортными средствами начинает функционирование, когда блок 52 определения состояния обнаружения окружающих транспортных средств получил расстояние между транспортными средствами (или позицию транспортного средства). Альтернативно, блок 55 получения первого расстояния между транспортными средствами может быть приспособлен, чтобы начинать функционирование при приеме операционной команды от блока 54 определения необходимости смены полосы движения.
[0021] Блок 56 получения второго расстояния между транспортными средствами получает "второе расстояние между транспортными средствами", представляющее другое расстояние между транспортными средствами, расположенное спереди или позади расстояния между транспортными средствами, которое служит в качестве цели для смены полосы движения транспортного средства на основе расстояния между транспортными средствами (или позиции транспортного средства), полученного посредством блока 52 определения состояния обнаружения окружающих транспортных средств. Например, второе расстояние между транспортными средствами является расстоянием между транспортными средствами между соседним транспортным средством, расположенным в боковом заднем направлении транспортного средства, и соседним транспортным средством, расположенным далее за ним на соседней полосе движения, или расстоянием между транспортными средствами между соседним транспортным средством, расположенным в боковом переднем направлении транспортного средства, и соседним транспортным средством, расположенным далее впереди него на соседней полосе движения. При этом, блок 56 получения второго расстояния между транспортными средствами получает, в качестве второго расстояния между транспортными средствами, "расстояние между движущимися следом соседними транспортными средствами" или "расстояние между движущимися впереди соседними транспортными средствами" или оба из них. Расстояние между движущимися следом соседними транспортными средствами является расстоянием между транспортными средствами между первым движущимся следом соседним транспортным средством и вторым движущимся следом соседним транспортным средством в качестве транспортного средства, движущегося следом за ним по соседней полосе движения. Расстояние между движущимися впереди соседними транспортными средствами является расстоянием между транспортными средствами между первым движущимся впереди соседним транспортным средством и вторым движущимся впереди соседним транспортным средством в качестве транспортного средства, движущегося впереди него по соседней полосе движения. Однако, фактически, блок 56 получения второго расстояния между транспортными средствами может дополнительно получать расстояние между транспортными средствами между вторым движущимся следом соседним транспортным средством и транспортным средством, движущимся следом за ним, и/или расстояние между транспортными средствами между вторым движущимся впереди соседним транспортным средством, и транспортным средством, движущимся впереди него. Другими словами, блок 56 получения второго расстояния между транспортными средствами может получать, в качестве второго расстояния между транспортными средствами, множество расстояний между транспортными средствами, продолжающихся в продольном направлении, на основе расстояния между транспортными средствами, служащего в качестве цели для смены полосы движения транспортного средства. Блок 56 получения второго расстояния между транспортными средствами начинает функционирование, когда блок 55 получения первого расстояния между транспортными средствами получил первое расстояние между транспортными средствами. Альтернативно, блок 56 получения второго расстояния между транспортными средствами может начинать функционирование при приеме операционной команды от блока 54 определения необходимости смены полосы движения. Кроме того, фактически, блок 55 получения первого расстояния между транспортными средствами и блок 56 получения второго расстояния между транспортными средствами могут быть объединены друг с другом.
[0022] Блок 57 определения возможности смены полосы движения определяет возможность смены полосы движения транспортного средства с помощью первого расстояния между транспортными средствами, полученного посредством блока 55 получения первого расстояния между транспортными средствами. При этом, блок 57 определения возможности смены полосы движения определяет возможность смены полосы движения транспортного средства с помощью "расстояния между движущимися сбоку соседними транспортными средствами". Когда определяется, что транспортное средство может менять полосы движения, блок 57 определения возможности смены полосы движения выводит управляющую команду тормозному устройству 9 и устройству 10 приведения в движение/рулевого управления через контроллер 6 тормоза и контроллер 7 приведения в движение/рулевого управления. Тормозное устройство 9 и устройство 10 приведения в движение/рулевого управления регулируют скорость транспортного средства и выполняют рулевое управление согласно управляющей команде, чтобы выполнять смену полосы движения транспортного средства. Кроме того, блок 57 определения возможности смены полосы движения может выводить операционную команду для указателя направления или т.п., чтобы автоматически выполнять указание намерения для смены полосы движения посредством указателя направления или т.п. Дополнительно, блок 57 определения возможности смены полосы движения может быть приспособлен, чтобы выводить управляющую команду для выполнения отображения экрана на дисплее или вывода звука из устройства вывода звука, чтобы сообщать о возможности смены полосы движения и выполнения (или запланированного выполнения) смены полосы движения пассажиру через отображение экрана или вывод звука. Блок 57 определения возможности смены полосы движения начинает функционирование, когда блок 55 получения первого расстояния между транспортными средствами получил первое расстояние между транспортными средствами. Альтернативно, блок 57 определения возможности смены полосы движения может быть приспособлен начинать функционирование при приеме операционной команды от блока 54 определения необходимости смены полосы движения. Дополнительно, фактически, блок 54 определения необходимости смены полосы движения и блок 57 определения возможности смены полосы движения могут быть объединены друг с другом.
[0023] Когда определяется посредством блока 57 определения возможности смены полосы движения, что смена полосы движения транспортного средства не является выполнимой, блок 58 определения необходимости ожидания использует второе расстояние между транспортными средствами, полученное посредством блока 56 получения расстояния между транспортными средствами, чтобы определять наличие или отсутствие возможности того, что первое расстояние между транспортными средствами расширится до протяженности, которая предоставляет возможность смены полосы движения, и определяет, ожидать или нет, по наличию или отсутствию возможности первого расстояния между транспортными средствами, которое расширится до протяженности, предоставляющей возможность для смены полосы движения. Например, когда соседнее транспортное средство, позиционирующееся на границе между первым расстоянием между транспортными средствами и вторым расстоянием между транспортными средствами, движется вперед или назад, и, тем самым, второе расстояние между транспортными средствами становится короче, первое расстояние между транспортными средствами становится длиннее, тогда как, когда второе расстояние между транспортными средствами становится длиннее, первое расстояние между транспортными средствами становится короче. При этом, блок 58 определения необходимости ожидания использует "расстояние между движущимися следом соседними транспортными средствами" или "расстояние между движущимися впереди соседними транспортными средствами" или оба из них, чтобы, в зависимости от изменения(ий) в их протяженности(ях), определять наличие или отсутствие возможности первого расстояния между транспортными средствами, которое будет расширяться до протяженности, предоставляющей возможность для смены полосы движения.
[0024] Блок 58 определения необходимости ожидания определяет, что ожидание необходимо, когда определяет, что существует возможность того, что первое расстояние между транспортными средствами расширится до протяженности, предоставляющей возможность смены полосы движения, и выводит управляющую команду тормозному устройству 9 и устройству 10 приведения в движение/рулевого управления через контроллер 6 тормоза и контроллер 7 приведения в движение/рулевого управления. Тормозное устройство 9 и устройство 10 приведения в движение/рулевого управления поддерживают текущее состояние движения транспортного средства и вынуждают транспортное средство ожидать в позиции сбоку от первого пространства между транспортными средствами, которое является пространством между транспортными средствами между первым движущимся впереди соседним транспортным средством и первым движущимся следом соседним транспортным средством. Во время ожидания блок 57 определения возможности смены полосы движения периодически использует первое расстояние между транспортными средствами, чтобы определять возможность смены полосы движения транспортного средства. При этом, блок 58 определения необходимости ожидания подсчитывает время ожидания. Затем, когда не определяется, что смена полосы движения транспортного средства является выполнимой даже после прохождения некоторого интервала времени (например, прохождения 10 секунд) от времени, когда транспортное средство начинает ожидать, блок 58 определения необходимости ожидания определяет, что не существует возможности того, что первое расстояние между транспортными средствами расширится до протяженности, предоставляющей возможность смены полосы движения.
[0025] Блок 58 определения необходимости ожидания определяет, что ожидание является излишним, когда определяет, что не существует возможности того, что первое расстояние между транспортными средствами расширится до протяженности, предоставляющей возможность смены полосы движения, и выводит управляющую команду тормозному устройству 9 и устройству 10 приведения в движение/рулевого управления через контроллер 6 тормоза и контроллер 7 приведения в движение/рулевого управления. Тормозное устройство 9 и устройство 10 приведения в движение/рулевого управления регулируют скорость транспортного средства согласно управляющей команде и перемещают транспортное средство в позицию, расположенную сбоку от второго пространства между транспортными средствами, соседнего спереди или сзади вышеописанного первого пространства между транспортными средствами.
В это время, когда определяется, что ожидание является излишним, блок 58 определения необходимости ожидания может использовать второе расстояние между транспортными средствами, чтобы определять возможность смены полосы движения транспортного средства для вышеупомянутого второго пространства между транспортными средствами. Например, блок 58 определения необходимости ожидания использует "расстояние между движущимися следом соседними транспортными средствами" или "расстояние между движущимися впереди соседними транспортными средствами" или оба из них, чтобы определять возможность смены полосы движения транспортного средства.
[0026] Когда определяется, что смена полосы движения транспортного средства для вышеупомянутого второго пространства между транспортными средствами является выполнимой, блок 58 определения необходимости ожидания выводит управляющую команду тормозному устройству 9 и устройству 10 приведения в движение/рулевого управления через контроллер 6 тормоза и контроллер 7 приведения в движение/рулевого управления. Тормозное устройство 9 и устройство 10 приведения в движение/рулевого управления регулирует скорость транспортного средства согласно управляющей команде и перемещает транспортное средство в позицию, расположенную сбоку от вышеупомянутого второго пространства между транспортными средствами.
Кроме того, когда определяется, что смена полосы движения транспортного средства для вышеупомянутого второго пространства между транспортными средствами не является выполнимой, блок 58 определения необходимости ожидания отказывается от смены полосы движения транспортного средства и выводит управляющую команду тормозному устройству 9 и устройству 10 приведения в движение/рулевого управления через контроллер 6 тормоза и контроллер 7 приведения в движение/рулевого управления. Тормозное устройство 9 и устройство 10 приведения в движение/рулевого управления прекращают ожидание согласно управляющей команде и продолжают движение по собственной полосе движения. Другими словами, без ожидания, транспортное средство движется по собственной полосе движения как обычно.
[0027] Кроме того, блок 58 определения необходимости ожидания может выводить управляющую команду для выполнения отображения экрана на дисплее или вывода звука из устройства вывода звука, чтобы сообщать о необходимости ожидания или необходимости перемещения транспортного средства пассажиру через отображение экрана или вывод звука. Кроме того, фактически, блок 57 определения возможности смены полосы движения и блок 58 определения необходимости ожидания могут быть объединены друг с другом.
Хотя не иллюстрировано, вышеописанное устройство 5 управления движением достигается посредством процессора, который управляется на основе программы и выполняет предварительно определенную обработку, и памяти, которая хранит программу и различные виды данных.
[0028] Вышеупомянутый процессор является CPU (ЦП), микропроцессором, микроконтроллером, полупроводниковой интегральной схемой (LSI), имеющей специализированные функции, или т.п. Вышеупомянутая память является RAM, ROM, EEPROM, флэш-памятью или т.п. Дополнительно, вместе с вышеупомянутой памятью или как альтернатива памяти, запоминающее устройство, такое как HDD или SSD, съемный диск, такой как DVD, носитель хранения информации (носитель), такой как SD-карта памяти, или т.п., может быть использовано. Кроме того, буфер, резистор или т.п. может быть использован.
Кроме того, вышеупомянутый процессор и вышеупомянутая память могут быть объединены друг с другом. Например, в последние годы видно увеличивающееся число микрокомпьютеров на одном кристалле и т.п. Соответственно, может также быть случай, в котором однокристальный микрокомпьютер, который устанавливается в электронное устройство или т.п., эквивалентное устройству 5 управления движением, снабжается вышеупомянутым процессором и вышеупомянутой памятью. Однако, фактически, изобретение не ограничено вышеописанными примерами.
[0029] (Окружающая обстановка для смены полосы движения)
Будет дано описание случая определения возможности смены полосы движения, беря в качестве примера окружающую обстановку для смены полосы движения (ситуацию дорожного движения), которая изображена на фиг. 3.
Фиг. 3 иллюстрирует собственную полосу движения "A", соседнюю полосу движения "B", транспортное средство "A1", первое движущееся следом соседнее транспортное средство "B21", второе движущееся следом соседнее транспортное средство "B22", первое движущееся впереди соседнее транспортное средство "B31", второе движущееся впереди соседнее транспортное средство "B32", расстояние "L1" между движущимися сбоку соседними транспортными средствами, расстояние "L2" между движущимися следом соседними транспортными средствами и расстояние "L3" между движущимися впереди соседними транспортными средствами . Кроме того, первое движущееся следом соседнее транспортное средство "B21", второе движущееся следом соседнее транспортное средство "B22", первое движущееся впереди соседнее транспортное средство "B31" и второе движущееся впереди соседнее транспортное средство "B32" являются транспортными средствами на соседней полосе "B" движения. Первое движущееся следом соседнее транспортное средство "B21" и второе движущееся следом соседнее транспортное средство "B22" являются транспортными средствами, расположенными позади транспортного средства "A1" в продольном направлении. Второе движущееся следом соседнее транспортное средство "B22" является транспортным средством, следующим за первым движущимся следом соседним транспортным средством "B21". Первое движущееся впереди соседнее транспортное средство "B31" и второе движущееся впереди соседнее транспортное средство "B32" являются транспортными средствами впереди транспортного средства "A1" в продольном направлении. Второе движущееся впереди соседнее транспортное средство "B32" является транспортным средством, движущимся впереди первого движущегося впереди соседнего транспортного средства "B31". Расстояние "L1" между движущимися сбоку соседними транспортными средствами является расстоянием между транспортными средствами между первым движущимся впереди соседним транспортным средством "B31" и первым движущимся следом соседним транспортным средством "B21". Расстояние "L2" между движущимися следом соседними транспортными средствами является расстоянием между транспортными средствами между первым движущимся следом соседним транспортным средством "B21" и вторым движущимся следом соседним транспортным средством "B22". Расстояние "L3" между соседними транспортными средствами является расстоянием между транспортными средствами между первым движущимся впереди соседним транспортным средством "B31" и вторым движущимся впереди соседним транспортным средством "B32".
[0030] В окружающей обстановке смены полосы движения, которая изображена на фиг. 3, блок 52 определения состояния обнаружения окружающих транспортных средств получает расстояние между транспортными средствами и относительную скорость каждого из первого движущегося следом соседнего транспортного средства "B21", второго движущегося следом соседнего транспортного средства "B22", первого движущегося впереди соседнего транспортного средства "B31" и второго движущегося впереди соседнего транспортного средства "B32" относительно транспортного средства "A1", чтобы проверять наличие или отсутствие каждого транспортного средства. Кроме того, блок 53 вычисления скорости окружающих транспортных средств вычисляет, на основе скорости "V1" транспортного средства, представляющей скорость транспортного средства "A1", и относительной скорости первого движущегося следом соседнего транспортного средства "B21", скорость "V21" первого движущегося следом соседнего транспортного средства, представляющую скорость первого движущегося следом соседнего транспортного средства "B21". Аналогично, на основе скорости "V1" транспортного средства и относительной скорости первого движущегося впереди соседнего транспортного средства "B31", блок 53 вычисления скорости окружающих транспортных средств вычисляет скорость "V31" первого движущегося впереди соседнего транспортного средства, представляющую скорость первого движущегося впереди соседнего транспортного средства "B31". Кроме того, что касается второго движущегося следом соседнего транспортного средства "B22" и второго движущегося впереди соседнего транспортного средства "B32", любая одна из их скоростей может быть вычислена. Блок 53 вычисления скорости окружающих транспортных средств вычисляет скорость "V1" транспортного средства с помощью датчика 2 скорости колеса, если необходимо. Дополнительно, фактически, блок 53 вычисления скорости окружающих транспортных средств может получать скорость "V21" первого движущегося следом соседнего транспортного средства и скорость "V31" первого движущегося впереди соседнего транспортного средства через устройство 4 связи (связи между транспортными средствами, связи дорога-транспортное средство или т.п.). Далее, блок 55 получения первого расстояния между транспортными средствами получает расстояние "L1" между движущимися сбоку соседними транспортными средствами в позиции сбоку от транспортного средства. Блок 56 получения второго расстояния между транспортными средствами вычисляет расстояние "L2" между движущимися следом соседними транспортными средствами в боковом заднем направлении транспортного средства и расстояние "L3" между движущимися впереди соседними транспортными средствами в его боковом переднем направлении. Кроме того, что касается расстояния "L2" между движущимися следом соседними транспортными средствами и расстояния "L3" между движущимися впереди соседними транспортными средствами, любое из них может быть вычислено.
[0031] Кроме того, в окружающей обстановке смены полосы движения, которая изображена на фиг. 3, блок 53 вычисления скорости окружающих транспортных средств проверяет, является ли собственная полоса движения полосой движения с более высокой скоростью или полосой движения с более низкой скоростью, чем соседняя полоса движения. Возможно проверять, является ли собственная полоса движения полосой движения с более высокой или более низкой скоростью, чем соседняя полоса движения, сравнивая скорость "V1" транспортного средства со скоростью "V21" первого движущегося следом соседнего транспортного средства и скоростью "V31" первого движущегося спереди соседнего транспортного средства. Например, когда скорость "V1" транспортного средства выше скорости "V21" первого движущегося следом соседнего транспортного средства и скорости "V31" первого движущегося впереди соседнего транспортного средства, собственная полоса движения может быть определена как полоса движения с более высокой скоростью, чем соседняя полоса движения. Дополнительно, когда скорость "V1" транспортного средства ниже скорости "V21" первого движущегося следом соседнего транспортного средства и скорости "V31" первого движущегося впереди соседнего транспортного средства, собственная полоса движения может быть определена как полоса движения с более низкой скоростью, чем соседняя полоса движения. Когда собственная полоса движения является полосой движения с более высокой скоростью, чем соседняя полоса движения, блок 58 определения необходимости ожидания использует информацию о расстоянии "L2" между движущимися следом соседними транспортными средствами, чтобы определять наличие или отсутствие возможности того, что расстояние "L1" между расположенными сбоку соседними транспортными средствами расширится до протяженности, предоставляющей возможность смены полосы движения, посредством изменения в протяженности расстояния "L2" между движущимися следом соседними транспортными средствами. Кроме того, когда собственная полоса движения является полосой движения с более низкой скоростью, чем соседняя полоса движения, блок 58 определения необходимости ожидания использует информацию о расстоянии "L3" между движущимися впереди соседними транспортными средствами, чтобы определять наличие или отсутствие возможности того, что расстояние "L1" между расположенными сбоку соседними транспортными средствами расширится до протяженности, предоставляющей возможность смены полосы движения, посредством изменения в протяженности расстояния "L3" между движущимися впереди соседними транспортными средствами. Подробности этого будут описаны ниже.
[0032] Сначала, со ссылкой на фиг. 4, будет дано описание случая, в котором собственная полоса движения является полосой движения с более высокой скоростью, чем соседняя полоса движения. В этом случае, посредством фокусировки на расстоянии "L2" между движущимися следом соседними транспортными средствами, определение будет выполнено относительно наличия или отсутствия возможности того, что расстояние "L1" между расположенными сбоку соседними транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения.
На этапе S101 блок 57 определения возможности смены полосы движения проверяет, больше или нет расстояние "L1" между расположенными сбоку соседними транспортными средствами первого порогового значения. В это время, не только определение о расстоянии "L1" между расположенными сбоку соседними транспортными средствами, но также определение об относительной скорости между транспортным средством "A1" и первым движущимся следом соседним транспортным средством "B21" и определение о расстоянии между позицией транспортного средства "A1" и конечной точкой смены полосы движения может быть выполнено в комбинации с ним. Первое пороговое значение представляет расстояние между транспортными средствами, необходимое, чтобы транспортное средство "A1" сменило полосы движения. Подробности первого порогового значения будут описаны позже. Когда расстояние "L1" между находящимися сбоку соседними транспортными средствами меньше первого порогового значения (Нет на этапе S101), расстояние "L1" между находящимися сбоку соседними транспортными средствами является недостаточным. Таким образом, смена полосы движения определяется как невыполнимая, и последовательность операций переходит к этапу S102. Кроме того, когда расстояние "L1" между находящимися сбоку соседними транспортными средствами больше первого порогового значения, расстояние "L1" между находящимися сбоку соседними транспортными средствами является достаточным. Таким образом, смена полосы движения определяется как выполнимая (Да на этапе S101), и последовательность операций переходит к этапу S104.
[0033] На этапе S102 блок 58 определения необходимости ожидания проверяет, больше или нет расстояние "L2" между движущимися следом соседними транспортными средствами второго порогового значения. Второе пороговое значение представляет расстояние между транспортными средствами, необходимое для первого движущегося следом соседнего транспортного средства "B21", чтобы расширять расстояние "L1" между находящимися сбоку соседними транспортными средствами (относительно перемещаться назад). Подробности второго порогового значения будут описаны позже. Когда расстояние "L2" между движущимися следом соседними транспортными средствами больше второго порогового значения (Да на этапе S102), последовательность операций переходит к этапу S103. Кроме того, когда расстояние "L2" между движущимися следом соседними транспортными средствами меньше второго порогового значения (Нет на этапе S102), последовательность операций переходит к этапу S105.
[0034] На этапе S103 блок 58 определения необходимости ожидания определяет, что существует возможность того, что первое движущееся следом соседнее транспортное средство "B21" замедлится относительно транспортного средства "A1", чтобы расширять расстояние "L1" между движущимися сбоку соседними транспортными средствами. Например, как изображено на фиг. 5A, в случае ситуации, в которой расстояние "L1" между движущимися сбоку соседними транспортными средствами меньше первого порогового значения, и расстояние "L2" между движущимися следом соседними транспортными средствами больше второго порогового значения (L1 < первого порогового значения, и L2 > второго порогового значения), определяется, что существует возможность того, что расстояние "L1" между движущимися сбоку соседними транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения (высокая вероятность). В это время, пассажир транспортного средства "A1" указывает намерение сменить полосы движения посредством указателя направления или т.п., и транспортное средство ожидает в позиции, расположенный сбоку по отношению к первому пространству между транспортными средствами, представленному расстоянием "L1" между движущимися сбоку соседними транспортными средствами, до тех пор, пока расстояние "L1" между движущимися сбоку соседними транспортными средствами не превысит первое пороговое значение (переход к этапу S101). Верхний предел может быть задан для времени ожидания в это время, или ожидание может быть отменено действием пассажира. Кроме того, пассажир может считаться блоком 57 определения возможности смены полосы движения или блоком 58 определения необходимости ожидания. Например, вместо пассажира, блок 57 определения возможности смены полосы движения или блок 58 определения необходимости ожидания может быть приспособлен, чтобы автоматически указывать намерение сменить полосы движения посредством указателя направления или т.п. Когда расстояние "L1" между движущимися сбоку соседними транспортными средствами становится больше первого порогового значения (Да на этапе S101 после перехода) посредством замедления первого движущегося следом соседнего транспортного средства "B21" относительно транспортного средства "A1", чтобы расширять расстояние "L1" между движущимися сбоку соседними транспортными средствами во время ожидания, блок 57 определения возможности смены полосы движения определяет, что смена полосы движения является выполнимой вследствие достаточного расстояния "L1" между движущимися сбоку соседними транспортными средствами, и последовательность операций переходит к этапу S104.
[0035] На этапе S104 блок 57 определения возможности смены полосы движения выводит управляющую команду тормозному устройству 9 и устройству 10 приведения в движение/рулевого управления через контроллер 6 тормоза и контроллер 7 приведения в движение/рулевого управления. Тормозное устройство 9 и устройство 10 приведения в движение/рулевого управления регулируют скорость транспортного средства "A1" и выполняют рулевое управление согласно управляющей команде, чтобы выполнять смену полосы движения транспортного средства "A1". Например, смена полосы движения в расстояние "L1" между движущимися сбоку соседними транспортными средствами выполняется, когда расстояние "L1" между движущимися сбоку соседними транспортными средствами больше первого порогового значения в настоящий момент, или когда первое движущееся следом соседнее транспортное средство "B21" замедлилось в ответ на указание намерения пассажиром транспортного средства "A1", и, таким образом, расстояние "L1" между движущимися сбоку соседними транспортными средствами стало больше первого порогового значения во время ожидания в позиции, находящейся сбоку от первого пространства между транспортными средствами, представленного расстоянием "L1" между движущимися сбоку соседними транспортными средствами.
[0036] На этапе S105 блок 58 определения необходимости ожидания определяет, что ожидание является излишним, поскольку не существует возможности того, что первое движущееся следом соседнее транспортное средство "B21" замедляется, чтобы расширять расстояние "L1" между движущимися сбоку соседними транспортными средствами, и транспортное средство перемещается в позицию сбоку от второго пространства между транспортными средствами, представленного другим расстоянием между транспортными средствами, находящимся спереди или сзади расстояния "L1" между движущимися сбоку соседними транспортными средствами. Фактически, когда определяется, что ожидание является излишним, блок 58 определения необходимости ожидания может определять возможность смены полосы движения транспортного средства в вышеупомянутое другое расстояние между транспортными средствами, и затем, когда он определяет, что смена полосы движения транспортного средства в вышеупомянутое другое расстояние между транспортными средствами является выполнимой, транспортное средство может перемещаться в позицию сбоку от второго пространства между транспортными средствами. Другими словами, когда ожидание определяется как излишнее, смена полосы движения в текущее пространство между транспортными средствами в позиции сбоку от транспортного средства "A1" отменяется, и предпринимается попытка смены полосы движения в другое пространство между транспортными средствами. Например, как изображено на фиг. 5B, когда расстояние "L1" между движущимися сбоку соседними транспортными средствами меньше первого порогового значения, и расстояние "L2" между движущимися следом соседними транспортными средствами также меньше второго порогового значения (L1 < первого порогового значения, и L2 < второго порогового значения), блок 58 определения необходимости ожидания определяет, что не существует возможности того, что расстояние "L1" между движущимися сбоку соседними транспортными средствами расширится до протяженности, предоставляющей возможность для смены полосы движения (низкая вероятность), таким образом, определяет, что ожидание является излишним, и выводит управляющую команду тормозному устройству 9 и устройству 10 приведения в движение/рулевого управления через контроллер 6 тормоза и контроллер 7 приведения в движение/рулевого управления. Тормозное устройство 9 и устройство 10 приведения в движение/рулевого управления регулируют скорость транспортного средства "A1", чтобы изменять позицию транспортного средства согласно управляющей команде, тем самым, перемещая транспортное средство в позицию сбоку от вышеупомянутого второго пространства между транспортными средствами. Например, транспортное средство "A1" ускоряется с тем, чтобы позиционироваться дальше вперед, чем первое движущееся впереди соседнее транспортное средство "B31". Поскольку транспортное средство "A1" движется по полосе движения с более высокой скоростью, чем полоса "B" движения, оно может опережать первое движущееся впереди соседнее транспортное средство "B31", когда перемещается в позицию сбоку от второго пространства между транспортными средствами во время последующего движения или во время смены полосы движения. В момент времени, когда транспортное средство "A1" опередило первое движущееся впереди соседнее транспортное средство "B31", последовательность операций переходит к этапу S106.
[0037] На этапе S106 блок 58 определения необходимости ожидания устанавливает расстояние "L1" между движущимися сбоку соседними транспортными средствами перед опережением первого движущегося впереди соседнего транспортного средства "B31" (прошлое) в расстояние "L2" между движущимися следом соседними транспортными средствами после опережения транспортного средства "B31" (текущее) (L2=L1). Например, в момент времени, когда транспортное средство "A1" опередило первое движущееся впереди соседнее транспортное средство "B31" (в момент времени, когда первое движущееся впереди соседнее транспортное средство "B31" стало первым движущимся следом соседним транспортным средством "B21"), расстояние "L1" между движущимися сбоку соседними транспортными средствами перед опережением устанавливается в расстояние "L2" между движущимися следом соседними транспортными средствами. При установке расстояния "L1" между движущимися сбоку соседними транспортными средствами в расстояние "L2" между движущимися следом соседними транспортными средствами, расстояние "L1" между движущимися сбоку соседними транспортными средствами прошлого времени может быть непосредственно заменено расстоянием между движущимися следом соседними транспортными средствами или может быть скорректировано согласно скорости транспортного средства для соседнего транспортного средства и прошедшему времени. Однако, фактически, после опережения первого движущегося впереди соседнего транспортного средства "B31", расстояние "L2" между движущимися следом соседними транспортными средствами может быть вновь получено от блока 56 получения второго расстояния между транспортными средствами.
[0038] Дополнительно, в вышеприведенном описании, даже в случае, в котором расстояние "L1" между движущимися сбоку соседними транспортными средствами приблизительно равно первому пороговому значению (L1 ≈ первое пороговое значение), может быть определено, что расстояние "L1" между движущимися сбоку соседними транспортными средствами больше первого порогового значения. Аналогично, даже в случае, в котором расстояние "L2" между движущимися следом соседними транспортными средствами приблизительно равно второму пороговому значению (L2 ≈ второе пороговое значение), может быть определено, что расстояние "L2" между движущимися следом соседними транспортными средствами больше второго порогового значения. При этом, причиной для использования выражения: приблизительно равно "≈" является расценивание некоторых погрешностей как приемлемых. Очевидно, это может также читаться как равное "=". Однако, фактически, изобретение не ограничено вышеописанными примерами.
[0039] Первое пороговое значение будет описано ниже.
Блок 57 определения возможности смены полосы движения получает время между транспортными средствами "THW1", которое может быть предварительно (заранее) установлено. Время между транспортными средствами "THW1" представляет время между транспортными средствами относительно транспортного средства на соседней полосе "B" движения, необходимое, когда транспортное средство "A1" сменило полосы движения. Блок 58 определения необходимости ожидания вычисляет и устанавливает первое пороговое значение на основе скорости "V1" транспортного средства и времени между транспортными средствами "THW1" по следующей формуле (1):
Первое пороговое значение=V1×THW1 … (1)
Например, когда "V1=100 км/ч" и "THW1=3 секунды", "первое пороговое значение=приблизительно 83 м". Первое пороговое значение является переменным согласно скорости "V1" транспортного средства. Соответственно, чем быстрее скорость "V1" транспортного средства, тем продолжительнее первое пороговое значение. Кроме того, фактически, вместо скорости "V1" транспортного средства, также возможно использовать относительную скорость между транспортным средством "A1" и транспортным средством на соседней полосе "B" движения. Таким образом, блок 57 определения возможности смены полосы движения устанавливает первое пороговое значение в качестве расстояния между транспортными средствами, необходимого для транспортного средства "A1", чтобы менять полосы движения.
[0040] Второе пороговое значение будет описано ниже.
Блок 58 определения необходимости ожидания получает ранее установленное минимальное время "THW2min" между движущимися следом транспортными средствами. Минимальное время "THW2min" между движущимися следом транспортными средствами - это минимальное время между транспортными средствами, которое необходимо поддерживать между первым движущимся следом соседним транспортным средством "B21" и вторым движущимся следом соседним транспортным средством "B22" во время последующего движения. Блок 58 определения необходимости ожидания вычисляет минимальное расстояние "L2min" между движущимися следом транспортными средствами между движущимися следом соседними транспортными средствами на основе скорости "V21" первого движущегося следом соседнего транспортного средства и минимального времени "THW2min" между движущимися следом транспортными средствами по следующей формуле (2):
L2min=THW2min×V21 … (2)
[0041] Минимальное расстояние "L2min" между движущимися следом транспортными средствами - это минимальное расстояние между транспортными средствами, которое необходимо поддерживать между первым движущимся следом соседним транспортным средством "B21" и вторым движущимся следом соседним транспортным средством "B22" во время последующего движения. Например, установка минимального времени "THW2min" между движущимися следом транспортными средствами в 4-5 секунд предоставляет возможность установки расстояния между транспортными средствами, которое не кажется необычным в типичной обстановке дорожного движения. Дополнительно, блок 58 определения необходимости ожидания получает ранее установленный "интервал" допуска регулировки. "Интервал" допуска регулировки - это расстояние, изменяемое (переменное) согласно ситуациям движения других транспортных средств вокруг транспортного средства "A1" и транспортного средства "A1" и другим условиям. Блок 58 определения необходимости ожидания вычисляет и устанавливает второе пороговое значение на основе минимального расстояния "L2min" между движущимися следом транспортными средствами, первого порогового значения, расстояния "L1" между движущимися сбоку соседними транспортными средствами и "интервала" допуска регулировки по следующей формуле (3):
Второе пороговое значение=L2min+первое пороговое значение - L1+интервал … (3)
[0042] Например, когда "L2min=приблизительно 83 м", "первое пороговое значение=приблизительно 83 м", "L1=50 м", и "интервал=10 м", "второе пороговое значение=приблизительно 126 м". Второе пороговое значение является переменным согласно расстоянию, полученному посредством вычитания расстояния между транспортными средствами "L1" из первого порогового значения (разницы между первым пороговым значением и расстоянием между транспортными средствами "L1"). Соответственно, чем длиннее расстояние между транспортными средствами "L1" относительно первого порогового значения, тем короче второе пороговое значение. Это обусловлено тем, что, когда расстояние между транспортными средствами "L1" достаточно длинное, расстояние между транспортными средствами, необходимое для того, чтобы транспортное средство "A1" сменило полосы движения, обеспечивается, даже если первое движущееся следом соседнее транспортное средство "B21" не предоставляет пространство. Таким образом, блок 58 определения необходимости ожидания устанавливает второе пороговое значение так, что транспортное средство "A1" может менять полосы движения, даже если первое движущееся следом соседнее транспортное средство "B21" не предоставляет пространство.
[0043] Задавая второе пороговое значение, как описано выше, условие "разрешающее расстояние L2 > недостаточного расстояния L1" удовлетворяется в позиционном соотношении, которое удовлетворяет условию "L2 > второго порогового значения". Пока условие удовлетворяется, первое движущееся следом соседнее транспортное средство "B21" может сдвигать позицию транспортного средства назад (относительно перемещаться назад посредством замедления или сохранения существующего положения), так, чтобы компенсировать недостаточное расстояние для расстояния "L1" между движущимися сбоку соседними транспортными средствами, как изображено на фиг. 6. Таким образом, когда транспортное средство "A1" указывает намерение сменить полосы движения, определяется, что существует возможность того, что первое движущееся следом соседнее транспортное средство "B21" расширит расстояние между транспортными средствами.
Таким образом, когда транспортное средство "A1" меняет полосы движения, прогнозирование влияния первого движущегося следом соседнего транспортного средства "B21" вследствие смены полосы движения с помощью не только расстояния "L1" между движущимися сбоку соседними транспортными средствами, но также расстояния "L2" между движущимися следом соседними транспортными средствами, предоставляет возможность определения смены полосы движения с более высокой точностью, чем в традиционных технологиях. Таким образом, при смене полос движения, позиционное соотношение между тремя соседними транспортными средствами может быть использовано, чтобы находить пространство, которое наиболее вероятно должно быть доступно, так что смена полосы движения может быть выполнена.
[0044] Далее, со ссылкой на фиг. 7, будет дано описание случая, в котором собственная полоса движения является полосой движения с более низкой скоростью, чем соседняя полоса движения. В этом случае, посредством фокусировки на расстоянии "L3" между движущимися впереди соседними транспортными средствами, определение будет выполнено относительно наличия или отсутствия возможности того, что расстояние "L1" между движущимися сбоку соседними транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения.
На этапе S201 блок 57 определения возможности смены полосы движения проверяет, больше или нет расстояние "L1" между движущимися сбоку соседними транспортными средствами первого порогового значения. В это время, не только определение о расстоянии "L1" между движущимися сбоку соседними транспортными средствами, но также определение об относительной скорости между транспортным средством "A1" и первым движущимся впереди соседним транспортным средством "B31" и определение о расстоянии между позицией транспортного средства "A1" и конечной точкой смены полосы движения может быть выполнено в комбинации с ним. Подробности первого порогового значения являются такими же, что и описанные выше. Когда расстояние "L1" между движущимися сбоку соседними транспортными средствами меньше первого порогового значения (Нет на этапе S201), расстояние "L1" между движущимися сбоку соседними транспортными средствами является недостаточным. Таким образом, смена полосы движения определяется как невыполнимая, и последовательность операций переходит к этапу S202. Кроме того, когда расстояние "L1" между движущимися сбоку соседними транспортными средствами больше первого порогового значения (Да на этапе S201), расстояние "L1" между движущимися сбоку соседними транспортными средствами является достаточным. Таким образом, смена полосы движения определяется как выполнимая, и последовательность операций переходит к этапу S204.
[0045] На этапе S202 блок 58 определения необходимости ожидания проверяет, больше или нет расстояние "L3" между движущимися впереди соседними транспортными средствами, чем третье пороговое значение. Третье пороговое значение представляет расстояние между транспортными средствами, необходимое для первого движущегося впереди соседнего транспортного средства "B31", чтобы расширять расстояние "L1" между движущимися сбоку соседними транспортными средствами (относительно перемещаться вперед). Подробности третьего порогового значения будут описаны позже. Когда расстояние "L3" между движущимися впереди соседними транспортными средствами больше третьего порогового значения (Да на этапе S202), последовательность операций переходит к этапу S203. Кроме того, когда расстояние "L3" между движущимися впереди соседними транспортными средствами меньше третьего порогового значения (Нет на этапе S202), последовательность операций переходит к этапу S205.
[0046] На этапе S203 блок 58 определения необходимости ожидания определяет, что существует возможность того, что первое движущееся впереди соседнее транспортное средство "B31" ускорится относительно транспортного средства "A1", чтобы расширять расстояние "L1" между движущимися сбоку соседними транспортными средствами. Например, как изображено на фиг. 8A, в случае ситуации, в которой расстояние "L1" между движущимися сбоку соседними транспортными средствами меньше первого порогового значения, и расстояние "L3" между движущимися впереди соседними транспортными средствами больше третьего порогового значения (L1 < первого порогового значения, и L3 > третьего порогового значения), определяется, что существует возможность того, что расстояние "L1" между движущимися сбоку соседними транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения. В это время, пассажир транспортного средства "A1" указывает намерение сменить полосы движения посредством указателя направления или т.п., и транспортное средство ожидает в позиции, расположенный сбоку по отношению к первому пространству между транспортными средствами, представленному расстоянием "L1" между движущимися сбоку соседними транспортными средствами, до тех пор, пока расстояние "L1" между движущимися сбоку соседними транспортными средствами не превысит первое пороговое значение (переход к этапу S201). Верхний предел может быть задан для времени ожидания в это время, или ожидание может быть отменено действием пассажира. Кроме того, пассажир может считаться блоком 57 определения возможности смены полосы движения или блоком 58 определения необходимости ожидания. Например, вместо пассажира, блок 57 определения возможности смены полосы движения или блок 58 определения необходимости ожидания может быть приспособлен, чтобы автоматически указывать намерение сменить полосы движения посредством указателя направления или т.п. Когда расстояние "L1" между движущимися сбоку соседними транспортными средствами становится больше первого порогового значения (Да на этапе S201 после перехода) посредством ускорения первого движущегося впереди соседнего транспортного средства "B31" относительно транспортного средства "A1", чтобы расширять расстояние "L1" между движущимися сбоку соседними транспортными средствами во время ожидания, блок 57 определения возможности смены полосы движения определяет, что смена полосы движения является выполнимой вследствие достаточного расстояния "L1" между движущимися сбоку соседними транспортными средствами, и последовательность операций переходит к этапу S204.
[0047] На этапе S204 блок 57 определения возможности смены полосы движения выводит управляющую команду тормозному устройству 9 и устройству 10 приведения в движение/рулевого управления через контроллер 6 тормоза и контроллер 7 приведения в движение/рулевого управления. Тормозное устройство 9 и устройство 10 приведения в движение/рулевого управления регулируют скорость транспортного средства "A1" и выполняют рулевое управление согласно управляющей команде, чтобы выполнять смену полосы движения транспортного средства "A1". Например, смена полосы движения в пределах расстояния "L1" между движущимися сбоку соседними транспортными средствами выполняется, когда расстояние "L1" между движущимися сбоку соседними транспортными средствами больше первого порогового значения в настоящий момент или в момент времени, когда первое движущееся впереди соседнее транспортное средство "B31" ускорилось в ответ на указание намерения пассажиром транспортного средства "A1", и, таким образом, расстояние "L1" между движущимися сбоку соседними транспортными средствами стало больше первого порогового значения во время ожидания в позиции, находящейся сбоку от первого пространства между транспортными средствами, представленного расстоянием "L1" между движущимися сбоку соседними транспортными средствами.
[0048] На этапе S205 блок 58 определения необходимости ожидания определяет, что ожидание является излишним, поскольку не существует возможности того, что первое движущееся впереди соседнее транспортное средство "B31" ускорится, чтобы расширять расстояние "L1" между движущимися сбоку соседними транспортными средствами, и транспортное средство перемещается в позицию сбоку от второго пространства между транспортными средствами, представленного другим расстоянием между транспортными средствами, находящимся спереди или сзади расстояния "L1" между движущимися сбоку соседними транспортными средствами. Фактически, когда определяется, что ожидание является излишним, блок 58 определения необходимости ожидания определяет возможность смены полосы движения в пределах вышеупомянутого другого расстояния между транспортными средствами. Затем, когда смена полосы движения транспортного средства в пределах другого расстояния между транспортными средствами определяется как исполнимая, транспортное средство может перемещаться в позицию сбоку от второго пространства между транспортными средствами. Другими словами, когда ожидание определяется как излишнее, смена полосы движения в текущее расстояние между транспортными средствами в позиции сбоку от транспортного средства "A1" отменяется, и предпринимается попытка смены полосы движения в другое пространство между транспортными средствами. Например, как изображено на фиг. 8B, когда расстояние "L1" между движущимися сбоку соседними транспортными средствами меньше первого порогового значения, и расстояние "L3" между движущимися впереди соседними транспортными средствами также меньше третьего порогового значения (L1 < первого порогового значения, и L3 < третьего порогового значения), блок 58 определения необходимости ожидания определяет, что не существует возможности того, что расстояние "L1" между движущимися сбоку соседними транспортными средствами будет расширено до протяженности, которая предоставляет возможность для смены полосы движения, таким образом, определяет, что ожидание является излишним, и выводит управляющую команду тормозному устройству 9 и устройству 10 приведения в движение/рулевого управления через контроллер 6 тормоза и контроллер 7 приведения в движение/рулевого управления. Тормозное устройство 9 и устройство 10 приведения в движение/рулевого управления регулируют скорость транспортного средства "A1", чтобы изменять позицию транспортного средства "A1" относительно первого движущегося следом соседнего транспортного средства "B21" согласно управляющей команде, тем самым, перемещая транспортное средство в позицию сбоку от вышеупомянутого второго пространства между транспортными средствами. Например, транспортное средство "A1" замедляется так, чтобы располагаться дальше назад, чем первое движущееся следом соседнее транспортное средство "B21". Альтернативно, транспортное средство "A1" вынуждено ожидать, так что первое движущееся следом соседнее транспортное средство "B21" ускоряется, чтобы располагаться дальше впереди, чем транспортное средство "A1". Поскольку транспортное средство "A1" движется по полосе движения с более низкой скоростью, чем полоса "B" движения, транспортное средство "A1" предоставляет возможность первому движущемуся следом соседнему транспортному средству "B21" проезжать (двигаться впереди), когда перемещается в позицию сбоку от второго пространства между транспортными средствами во время последующего движения или во время смены полосы движения. В момент времени, когда транспортное средство "A1" было опережено первым движущимся следом соседним транспортным средством "B21", последовательность операций переходит к этапу S206.
[0049] На этапе S206 блок 58 определения необходимости ожидания устанавливает расстояние "L1" между движущимися сбоку соседними транспортными средствами перед опережением первым движущимся следом соседним транспортным средством "B21" (прошлое) в расстояние "L3" между движущимися впереди соседними транспортными средствами после опережения (текущее) (L3=L1). Например, в момент времени, когда транспортное средство "A1" было опережено первым движущимся следом соседним транспортным средством "B21" (в момент времени, когда первое движущееся следом соседнее транспортное средство "B21" стало первым движущимся впереди соседним транспортным средством "B31"), расстояние "L1" между движущимися сбоку соседними транспортными средствами перед опережением устанавливается в расстояние "L3" между движущимися впереди соседними транспортными средствами. При установке расстояния "L1" между движущимися сбоку соседними транспортными средствами в расстояние "L3" между движущимися впереди соседними транспортными средствами, расстояние "L1" между движущимися сбоку соседними транспортными средствами прошлого времени может быть непосредственно заменено расстоянием между движущимися впереди соседними транспортными средствами или может быть скорректировано согласно скорости транспортного средства для соседнего транспортного средства и прошедшему времени. Однако, фактически, после опережения первым движущимся следом соседним транспортным средством "B21", расстояние "L3" между движущимися впереди соседними транспортными средствами может быть вновь получено от блока 56 получения второго расстояния между транспортными средствами.
[0050] Дополнительно, в вышеприведенном описании, даже в случае, в котором расстояние "L1" между движущимися сбоку соседними транспортными средствами приблизительно равно первому пороговому значению (L1 ≈ первое пороговое значение), может быть определено, что расстояние "L1" между движущимися сбоку соседними транспортными средствами больше первого порогового значения. Аналогично, даже в случае, в котором расстояние "L3" между движущимися впереди соседними транспортными средствами приблизительно равно третьему пороговому значению (L3 ≈ третье пороговое значение), может быть определено, что расстояние "L3" между движущимися впереди соседними транспортными средствами больше третьего порогового значения. При этом, причиной для использования выражения: приблизительно равно "≈" является расценивание некоторых погрешностей как приемлемых. Очевидно, это может также читаться как равное "=". Однако, фактически, изобретение не ограничено вышеописанными примерами.
[0051] Третье пороговое значение будет описано ниже.
Блок 58 определения необходимости ожидания получает ранее установленное минимальное время "THW3min" между движущимися впереди транспортными средствами. Минимальное время "THW3min" между движущимися впереди транспортными средствами - это минимальное время между транспортными средствами, которое необходимо поддерживать между первым движущимся впереди соседним транспортным средством "B31" и вторым движущимся впереди соседним транспортным средством "B32" во время последующего движения. Блок 58 определения необходимости ожидания вычисляет минимальное расстояние "L3min" между движущимися впереди транспортными средствами между движущимися впереди соседними транспортными средствами на основе скорости "V31" первого движущегося впереди соседнего транспортного средства и минимального времени "THW3min" между движущимися впереди транспортными средствами по следующей формуле (4):
L3min=THW3min × V31 … (4)
[0052] Минимальное расстояние "L3min" между движущимися впереди транспортными средствами - это минимальное расстояние между транспортными средствами, которое необходимо поддерживать между первым движущимся впереди соседним транспортным средством "B31" и вторым движущимся впереди соседним транспортным средством "B32" во время последующего движения. Например, установка минимального времени "THW3min" между движущимися впереди транспортными средствами в 4-5 секунд предоставляет возможность установки расстояния между транспортными средствами, которое не кажется необычным в типичной обстановке дорожного движения. Дополнительно, блок 58 определения необходимости ожидания получает ранее установленный "интервал" допуска регулировки. "Интервал" допуска регулировки является таким, как описано выше. Блок 58 определения необходимости ожидания вычисляет и устанавливает третье пороговое значение на основе минимального расстояния "L3min" между движущимися впереди транспортными средствами, первого порогового значения, расстояния "L1" между движущимися сбоку соседними транспортными средствами и "интервала" разрешения регулировки по следующей формуле (5):
Третье пороговое значение=L3min+первое пороговое значение - L1+интервал … (5)
[0053] Например, когда "L3min=приблизительно 83 м", "первое пороговое значение=приблизительно 83 м", "L1=50 м", и "интервал=10 м", "третье пороговое значение=приблизительно 126 м". Третье пороговое значение является переменным согласно расстоянию, полученному посредством вычитания расстояния между транспортными средствами "L1" из первого порогового значения (разницы между первым пороговым значением и расстоянием между транспортными средствами "L1"). Таким образом, чем длиннее расстояние между транспортными средствами "L1" относительно первого порогового значения, тем короче третье пороговое значение. Это обусловлено тем, что, когда расстояние между транспортными средствами "L1" достаточно длинное, расстояние между транспортными средствами, необходимое для того, чтобы транспортное средство "A1" сменило полосы движения, обеспечивается, даже если первое движущееся впереди соседнее транспортное средство "B31" не предоставляет пространство. Таким образом, блок 58 определения необходимости ожидания устанавливает третье пороговое значение так, что транспортное средство "A1" может менять полосы движения, даже если первое движущееся впереди соседнее транспортное средство "B31" не предоставляет пространство.
[0054] Задавая третье пороговое значение, как описано выше, условие "расстояние допуска для L3 > недостаточного расстояния L1" удовлетворяется в позиционном соотношении, которое удовлетворяет условию "L3 > третьего порогового значения". Как изображено на фиг. 9, первое движущееся впереди соседнее транспортное средство "B31" может сдвигать позицию транспортного средства вперед (перемещаться относительно вперед посредством ускорения или поддержания существующего положения) так, чтобы компенсировать недостаточное расстояние для расстояния "L1" между движущимися сбоку соседними транспортными средствами. Таким образом, когда транспортное средство "A1" указывает намерение сменить полосы движения, определяется, что существует возможность того, что первое движущееся впереди соседнее транспортное средство "B31" расширит расстояние между транспортными средствами.
Таким образом, когда транспортное средство "A1" меняет полосы движения, прогнозирование влияния первого движущегося впереди соседнего транспортного средства "B31" вследствие смены полосы движения с помощью не только расстояния "L1" между движущимися сбоку соседними транспортными средствами, но также расстояния "L3" между движущимися впереди соседними транспортными средствами, предоставляет возможность определения смены полосы движения с более высокой точностью, чем в традиционных технологиях. Таким образом, при смене полос движения, позиционное соотношение между тремя соседними транспортными средствами может быть использовано, чтобы находить пространство, которое наиболее вероятно должно быть доступно, так что смена полосы движения может быть выполнена.
[0055] (Режим работы и прочее)
Далее будет дано описание режима работы транспортного средства.
Транспортное средство "A1" выполняет ACC-движение или движение в колонне посредством блока 51 установки состояния управления. Во время движения по собственной полосе "A" движения транспортное средство "A1" получает расстояние между транспортными средствами и относительную скорость (или позицию транспортного средства и скорость транспортного средства) каждого из первого движущегося следом соседнего транспортного средства "B21" в боковом заднем направлении транспортного средства, второго движущегося следом соседнего транспортного средства "B22", как транспортного средства, движущегося следом за ним, первого движущегося впереди транспортного средства "B31" в боковом переднем направлении транспортного средства и второго движущегося впереди соседнего транспортного средства "B32" как транспортного средства, движущегося впереди него, на соседней полосе "B" движения относительно транспортного средства "A1" посредством блока 52 определения состояния обнаружения окружающих транспортных средств, чтобы определять присутствие или отсутствие каждого транспортного средства. Дополнительно, блок 53 вычисления скорости окружающих транспортных средств вычисляет скорость "V21" первого движущегося следом соседнего транспортного средства, представляющую скорость первого движущегося следом соседнего транспортного средства B21" на основе скорости "V1" транспортного средства, представляющей скорость транспортного средства "A1", и относительной скорости первого движущегося следом соседнего транспортного средства "B21". Аналогично, на основе скорости "V1" транспортного средства и относительной скорости первого движущегося впереди соседнего транспортного средства "B31", блок 53 вычисления скорости окружающих транспортных средств вычисляет скорость "V31" первого движущегося впереди соседнего транспортного средства, представляющую скорость первого движущегося впереди соседнего транспортного средства "B31". Кроме того, посредством блока 53 вычисления скорости окружающих транспортных средств, транспортное средство "A1" проверяет, по меньшей мере, одну из скорости "V21" первого движущегося следом соседнего транспортного средства и скорости "V31" первого движущегося впереди транспортного средства и скорости "V1" транспортного средства, чтобы проверять, является ли собственная полоса "A" движения полосой движения с более высокой скоростью или полосой движения с более низкой скоростью, чем соседняя полоса "B" движения. Таким образом, транспортное средство "A1" может распознавать существование соседних транспортных средств вокруг транспортного средства "A1" на соседней полосе "B" движения. Дополнительно, посредством блока 53 вычисления скорости окружающих транспортных средств, транспортное средство "A1" может понимать скорости соседних транспортных средств. Кроме того, посредством блока 53 вычисления скорости окружающих транспортных средств, транспортное средство "A1" может проверять скорость транспортного средства "A1" и скорости соседних транспортных средств, чтобы проверять, является ли собственная полоса "A" движения полосой движения с более высокой скоростью или полосой движения с более низкой скоростью, чем соседняя полоса "B" движения.
[0056] Когда первое движущееся следом соседнее транспортное средство "B21" и первое движущееся впереди соседнее транспортное средство "B31" были обнаружены посредством блока 52 определения состояния обнаружения окружающих транспортных средств, транспортное средство "A1" вычисляет, посредством блока 55 получения первого расстояния между транспортными средствами, расстояние "L1" между движущимися сбоку соседними транспортными средствами на основе расстояния между транспортными средствами (или позиции транспортного средства) с каждым из первого движущегося следом соседнего транспортного средства "B21" и первого движущегося впереди соседнего транспортного средства "B31". Кроме того, когда первое движущееся следом соседнее транспортное средство "B21" и первое движущееся впереди соседнее транспортное средство "B31" не были обнаружены посредством блока 52 определения состояния обнаружения окружающих транспортных средств, очевидно, что смена полосы движения является выполнимой, без необходимости вычислять расстояние "L1" между движущимися сбоку соседними транспортными средствами. В этом случае, для удобства, расстояние "L1" между движущимися сбоку соседними транспортными средствами может иметь значение, которое является бесконечным или достаточно большим. Кроме того, блок 55 получения первого расстояния между транспортными средствами может вычислять расстояние "L1" между движущимися сбоку соседними транспортными средствами перед, после или в то же самое время, когда блок 53 вычисления скорости окружающих транспортных средств проверяет, является ли собственная полоса "A" движения полосой движения с более высокой скоростью или полосой движения с более низкой скоростью, чем соседняя полоса "B" движения. Это обусловлено тем, что расстояние "L1" между движущимися сбоку соседними транспортными средствами будет вычислено в любом случае независимо от того, является ли она полосой движения с более высокой скоростью или полосой движения с более низкой скоростью.
[0057] Когда собственная полоса "A" движения является полосой движения с более высокой скоростью, чем соседняя полоса "B" движения, и второе движущееся впереди соседнее транспортное средство "B32" было обнаружено посредством блока 52 определения состояния обнаружения окружающих транспортных средств, транспортное средство "A1" вычисляет, посредством блока 56 получения второго расстояния между транспортными средствами, расстояние "L2" между движущимися следом соседними транспортными средствами на основе расстояния между транспортными средствами с (или позиции транспортного средства) каждым из первого движущегося следом соседнего транспортного средства "B21" и второго движущегося следом соседнего транспортного средства "B22". Посредством блока 57 определения возможности смены полосы движения транспортное средство "A1" определяет возможность смены полосы движения транспортного средства "A1" с помощью расстояния "L1" между движущимися сбоку соседними транспортными средствами. Когда смена полосы определяется как невыполнимая, блок 58 определения необходимости ожидания проверяет расстояние "L2" между движущимися следом соседними транспортными средствами, чтобы определять наличие или отсутствие возможности того, что расстояние "L1" между движущимися сбоку соседними транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения, посредством изменения в протяженности расстояния "L2" между движущимися следом соседними транспортными средствами.
[0058] Кроме того, когда второе движущееся следом соседнее транспортное средство "B22" не было обнаружено посредством блока 52 определения состояния обнаружения окружающих транспортных средств, указывается несуществование второго движущегося следом соседнего транспортного средства "B22". Таким образом, очевидно, существует возможность того, что расстояние "L1" между движущимися сбоку соседними транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения. В этом случае, для удобства, расстояние "L2" между движущимися следом соседними транспортными средствами может иметь значение, которое является бесконечным или достаточно большим.
Таким образом, транспортное средство "A1" автоматически определяет, может или нет транспортное средство "A1" менять полосы движения в случае, в котором собственная полоса "A" движения является полосой движения с более высокой скоростью, чем соседняя полоса "B" движения. Дополнительно, транспортное средство "A1" автоматически определяет, существует ли возможность того, что расстояние "L1" между движущимися сбоку соседними транспортными средствами расширится до протяженности, которая предоставляет возможность смены полосы движения в случае, в котором транспортное средство "A1" в настоящее время не может менять полосы движения.
[0059] Когда собственная полоса "A" движения является полосой движения с более низкой скоростью, чем соседняя полоса "B" движения, и второе движущееся следом соседнее транспортное средство "B22" было обнаружено посредством блока 52 определения состояния обнаружения окружающих транспортных средств, транспортное средство "A1" вычисляет, посредством блока 56 получения второго расстояния между транспортными средствами, расстояние "L3" между движущимися впереди соседними транспортными средствами на основе расстояния между транспортными средствами с (или позиции транспортного средства) каждым из первого движущегося впереди соседнего транспортного средства "B31" и второго движущегося впереди соседнего транспортного средства "B32". Посредством блока 57 определения возможности смены полосы движения транспортное средство "A1" определяет возможность смены полосы движения транспортного средства "A1" с помощью расстояния "L1" между движущимися сбоку соседними транспортными средствами. Когда смена полосы определяется как невыполнимая, блок 58 определения необходимости ожидания проверяет расстояние "L3" между движущимися впереди соседними транспортными средствами, чтобы определять наличие или отсутствие возможности того, что расстояние "L1" между движущимися сбоку соседними транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения, посредством изменения в протяженности расстояния "L3" между движущимися впереди соседними транспортными средствами.
[0060] Дополнительно, когда второе движущееся впереди соседнее транспортное средство "B32" не было обнаружено посредством блока 52 определения состояния обнаружения окружающих транспортных средств, указывается несуществование второго движущегося впереди соседнего транспортного средства "B32". Таким образом, очевидно, существует возможность того, что расстояние "L1" между движущимися сбоку соседними транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения. В этом случае, для удобства, расстояние "L3" между движущимися впереди соседними транспортными средствами может иметь значение, которое является бесконечным или достаточно большим.
Таким образом, транспортное средство "A1" автоматически определяет, может или нет транспортное средство "A1" менять полосы движения в случае, в котором собственная полоса "A" движения является полосой движения с более низкой скоростью, чем соседняя полоса "B" движения. Дополнительно, транспортное средство "A1" автоматически определяет, существует ли возможность того, что расстояние "L1" между движущимися сбоку соседними транспортными средствами расширится до протяженности, которая предоставляет возможность смены полосы движения в случае, в котором транспортное средство "A1" в настоящее время не может менять полосы движения.
[0061] Однако, фактически, независимо от того, является ли собственная полоса "A" движения полосой движения с более высокой скоростью или полосой движения с более низкой скоростью, чем соседняя полоса "B" движения, когда второе движущееся следом соседнее транспортное средство "B22" и второго движущееся впереди соседнее транспортное средство "B32", оба были обнаружены посредством блока 52 определения состояния обнаружения окружающих транспортных средств, транспортное средство "A1" может вычислять, посредством блока 56 получения второго расстояния между транспортными средствами, и расстояние "L2" между движущимися следом соседними транспортными средствами, и расстояние "L3" между движущимися впереди соседними транспортными средствами.
Например, когда и расстояние "L2" между движущимися следом соседними транспортными средствами, и расстояние "L3" между движущимися впереди соседними транспортными средствами были вычислены посредством блока 56 получения второго расстояния между транспортными средствами, транспортное средство "A1" инструктирует блоку 58 определения необходимости ожидания проверять как расстояние "L2" между движущимися следом соседними транспортными средствами, так и расстояние "L3" между движущимися впереди соседними транспортными средствами, чтобы определять наличие или отсутствие возможности того, что расстояние "L1" между движущимися сбоку соседними транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения, посредством изменения в протяженности любого из расстояний между транспортными средствами.
[0062] Таким образом, когда транспортное средство "A1" в настоящее время не может менять полосы движения, транспортное средство "A1" автоматически определяет, существует ли возможность того, что расстояние "L1" между движущимися сбоку соседними транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения.
Когда блок 57 определения возможности смены полосы движения определяет, что смена полосы движения является выполнимой, или когда блок 58 определения необходимости ожидания определяет, что существует возможность того, что расстояние "L1" между движущимися сбоку соседними транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения, транспортное средство "A1" выводит управляющую команду тормозному устройству 9 и устройству 10 приведения в движение/рулевого управления через контроллер 6 тормоза и контроллер 7 приведения в движение/рулевого управления и меняет полосы движения посредством тормозного устройства 9 и устройства 10 приведения в движение/рулевого управления.
[0063] В это время, транспортное средство "A1" может инструктировать блоку 57 определения возможности смены полосы движения или блоку 58 определения необходимости ожидания выводить операционную команду для указателя направления или т.п., чтобы автоматически указывать намерение сменить полосы движения посредством указателя направления или т.п.
Кроме того, транспортное средство "A1" может инструктировать блоку 57 определения возможности смены полосы движения или блоку 58 определения необходимости ожидания выводить управляющую команду для выполнения отображения экрана на дисплее или вывода звука из устройства вывода звука, чтобы оповещать о возможности смены полосы движения и выполнении (или запланированном выполнении) смены полосы движения пассажира через отображение экрана или вывод звука.
[0064] При этом, когда блок 57 определения возможности смены полосы движения определяет, что смена полосы движения является выполнимой, смена полосы движения транспортного средства "A1" может быть немедленно выполнена. Соответственно, транспортное средство "A1" немедленно меняет полосы движения с собственной полосы "A" движения на соседнюю полосу "B" движения посредством тормозного устройства 9 и устройства 10 приведения в движение/рулевого управления, чтобы перемещаться в пространство между первым движущимся следом соседним транспортным средством "B21" и первым движущимся впереди соседним транспортным средством "B31" и двигаться по соседней полосе "B" движения.
Соответственно, когда блок 58 определения необходимости ожидания определяет, что существует возможность того, что расстояние "L1" между движущимися сбоку соседними транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения, транспортное средство "A1" сохраняет текущее состояние движения и ожидает. Затем, в случае, в котором соседнее транспортное средство предоставляет пространство во время ожидания, транспортное средство "A1" меняет полосы движения с собственной полосы "A" движения на соседнюю полосу "B" движения посредством тормозного устройства 9 и устройства 10 приведения в движение/рулевого управления, чтобы перемещаться в пространство между первым движущимся следом соседним транспортным средством "B21" и первым движущимся впереди соседним транспортным средством "B31" и двигаться по соседней полосе "B" движения.
[0065] Кроме того, транспортное средство "A1" инструктирует блоку 58 определения необходимости ожидания подсчитывать время ожидания, определяет, что не существует возможности выполнения расстояния "L1" между движущимися сбоку соседними транспортными средствами в случае, в котором соседнее транспортное средство не предоставляет пространство, даже после того как некоторый интервал времени проходит (например, 10 секунд проходит) от времени, когда транспортное средство "A1" начинает ожидание, и определяет, что ожидание является излишним.
Когда блок 58 определения необходимости ожидания определяет, что ожидание является излишним, транспортное средство "A1" не ожидает и выводит управляющую команду тормозному устройству 9 и устройству 10 приведения в движение/рулевого управления через контроллер 6 тормоза и контроллер 7 приведения в движение/рулевого управления. В это время, когда блок 58 определения необходимости ожидания определяет, что не существует возможности расширения расстояния "L1" между движущимися сбоку соседними транспортными средствами, транспортное средство "A1" может определять возможность смены полосы движения транспортного средства в другое расстояние между транспортными средствами, находящееся спереди или сзади расстояния "L1" между движущимися сбоку соседними транспортными средствами. Например, транспортное средство "A1" инструктирует блоку 58 определения необходимости ожидания определять возможность смены полосы движения транспортного средства с помощью "расстояния между движущимися следом соседними транспортными средствами" или "расстояния между движущимися впереди соседними транспортными средствами" или их обоих.
[0066] Когда определяется посредством блока 58 определения необходимости ожидания, что транспортное средство может менять полосы движения в вышеуказанное другое расстояние между транспортными средствами, транспортное средство "A1" ускоряется, замедляется или поддерживает текущую скорость посредством тормозного устройства 9 и устройства 10 приведения в движение/рулевого управления и перемещается в продольном направлении относительно по отношению к соседним транспортным средствам, чтобы перемещаться в позицию сбоку от второго пространства между транспортными средствами, которое служит в качестве новой цели для смены полосы движения.
Например, когда собственная полоса "A" движения является полосой движения с более высокой скоростью, чем соседняя полоса "B" движения, транспортное средство "A1" ускоряется или поддерживает текущую скорость и перемещается относительно вперед по отношению к первому движущемуся впереди соседнему транспортному средству "B31", чтобы перемещаться в позицию поперечную относительно расстояния между транспортными средствами, сформированного первым движущимся впереди соседним транспортным средством "B31" и вторым движущимся впереди соседним транспортным средством "B32", и использует расстояние между транспортными средствами в позиции сбоку от транспортного средства после перемещения в качестве нового целевого пространства для смены полосы движения. Затем, расстояние "L1" между движущимися сбоку соседними транспортными средствами перед перемещением используется в качестве расстояния "L2" между движущимися следом соседними транспортными средствами после перемещения.
[0067] Кроме того, когда собственная полоса "A" движения является полосой движения с более низкой скоростью, чем соседняя полоса "B" движения, транспортное средство "A1" замедляется или поддерживает текущую скорость и перемещается относительно назад по отношению к первому движущемуся следом соседнему транспортному средству "B21", чтобы перемещаться в позицию поперечную относительно расстояния между транспортными средствами, сформированного первым движущимся следом соседним транспортным средством "B21" и вторым движущимся следом соседним транспортным средством "B22", и использует расстояние между транспортными средствами в позиции сбоку от транспортного средства после перемещения в качестве нового целевого пространства для смены полосы движения. Затем, расстояние "L1" между движущимися сбоку соседними транспортными средствами перед перемещением используется в качестве расстояния "L3" между движущимися впереди соседними транспортными средствами после перемещения.
Кроме того, когда определяется посредством блока 58 определения необходимости ожидания, что транспортное средство не может менять полосы движения в вышеупомянутое другое расстояние между транспортными средствами, транспортное средство "A1" отменяет смену своей полосы, прекращает ожидание и продолжает двигаться по собственной полосе "A" движения.
Кроме того, посредством блока 58 определения необходимости ожидания, транспортное средство "A1" может быть приспособлено, чтобы выводить управляющую команду для выполнения отображения экрана на дисплее или вывода звука из устройства вывода звука, чтобы сообщать о возможности смены полосы движения и выполнении (или запланированном выполнении) смены полосы движения или необходимости ожидания и необходимости перемещения транспортного средства пассажиру через отображение экрана или вывод звука.
[0068] (Модифицированные примеры)
В вышеприведенном описании, когда определяется возможность смены полосы движения, вероятность, с которой смена полосы движения является выполнимой, может быть вычислена поэтапно (в нескольких приращениях) согласно протяженностям расстояния "L2" между движущимися следом соседними транспортными средствами и расстояния "L3" между движущимися впереди соседними транспортными средствами, и когда вероятность находится на некотором уровне (например, 60%) или более, смена полосы движения может быть определена как возможная. Например, когда расстояние "L2" между движущимися следом соседними транспортными средствами и расстояние "L3" между движущимися впереди соседними транспортными средствами меньше соответствующих пороговых значений (второго порогового значения и третьего порогового значения), вероятность, с которой смена полосы движения является выполнимой, может быть вычислена как равная "0%", тогда как, когда расстояние "L2" между движущимися следом соседними транспортными средствами и расстояние "L3" между движущимися впереди соседними транспортными средствами больше (или приблизительно равно) соответствующих пороговых значений, различия (допустимые расстояния) между расстояниями и соответствующими пороговыми значениями могут быть проверены, и, согласно величинам различий, вычисление может быть выполнено поэтапно для вероятности, с которой смена полосы движения является выполнимой. Дополнительно, вероятность, с которой смена полосы движения является выполнимой, может быть сообщена пассажиру через отображение экрана или вывод звука. Однако, фактически, изобретение не ограничено вышеописанными примерами.
[0069] Кроме того, когда связь между транспортными средствами и связь дорога-транспортное средство возможны, устройство 5 управления движением может быть устройством на дороге или придорожным устройством. Кроме того, когда выполняется моделирование смены полосы движения на вычислительной машине, или когда сервер или т.п., способный связываться с транспортным средством, выполняет управление движением, устройство 5 управления движением может быть вычислительной машиной, такой как персональный компьютер (PC), прибором, рабочей станцией, мэйнфреймом или суперкомпьютером. В этом случае, вычислительная машина может быть виртуальной машиной (VM), созданной на физической машине. Кроме того, устройство 5 управления движением может быть автомобильной навигационной системой, мобильным телефоном, смартфоном, смартбуком, игровой машиной, дисплеем, устанавливаемым на голове, или т.п., способным уведомлять о возможности смены полосы движения и выполнении (или запланированном выполнении) смены полосы движения пассажира через отображение экрана или вывод звука. Кроме того, устройство 5 управления движением может быть установлено, отлично от транспортного средства, также в подвижном блоке, который движется в режиме работы, аналогичном транспортному средству. Однако, фактически, изобретение не ограничено вышеописанными примерами.
[0070] Дополнительно, в блоке 57 определения возможности смены полосы движения и блоке 58 определения необходимости ожидания, описанных выше, их структуры могут также быть подразделены для каждой функции.
Например, вышеописанный блок 57 определения возможности смены полосы движения может быть разделен на "блок вычисления первого порогового значения" и "блок определения первого порогового значения". Фактически, блок 57 определения возможности смены полосы движения может включать в себя "блок вычисления первого порогового значения" и "блок определения первого порогового значения". Блок вычисления первого порогового значения вычисляет первое пороговое значение на основе скорости транспортного средства. Блок определения первого порогового значения определяет возможность смены полосы движения транспортного средства на основе соотношения величин между первым пороговым значением и первым расстоянием между транспортными средствами.
[0071] Кроме того, вышеописанный блок 58 определения необходимости может быть разделен на "блок вычисления второго порогового значения", "блок определения второго порогового значения", "блок вычисления третьего порогового значения" и "блок определения третьего порогового значения". Фактически, блок 58 определения необходимости ожидания может включать в себя "блок вычисления второго порогового значения", "блок определения второго порогового значения", "блок вычисления третьего порогового значения" и "блок определения третьего порогового значения". При этом, блок 58 определения необходимости ожидания может включать в себя только "блок вычисления второго порогового значения и блок определения второго порогового значения" или может включать в себя только "блок вычисления третьего порогового значения и блок определения третьего порогового значения". Другими словами, структура блока 58 определения необходимости ожидания может быть необязательно изменяемой согласно ситуации реализации. Блок вычисления второго порогового значения и блок определения второго порогового значения используются, когда второе расстояние между транспортными средствами является расстоянием между движущимися следом соседними транспортными средствами. Блок вычисления второго порогового значения вычисляет второе пороговое значение с помощью различия между первым пороговым значением и первым расстоянием между транспортными средствами, когда смена полосы движения транспортного средства определяется как невыполнимая. Блок определения второго порогового значения определяет наличие или отсутствие возможности того, что движущееся следом соседнее транспортное средство предоставляет пространство, так что транспортное средство может менять полосы движения на основе соотношения величин между вторым пороговым значением и расстоянием между движущимися следом соседними транспортными средствами. Дополнительно, блок вычисления третьего порогового значения и блок определения третьего порогового значения используются, когда второе расстояние между транспортными средствами является расстоянием между движущимися впереди соседними транспортными средствами. Блок вычисления третьего порогового значения вычисляет третье пороговое значение с помощью различия между первым пороговым значением и первым расстоянием между транспортными средствами, когда смена полосы движения транспортного средства определяется как невыполнимая. Блок определения третьего порогового значения определяет наличие или отсутствие возможности того, что движущееся впереди соседнее транспортное средство предоставляет пространство, так что транспортное средство может менять полосы движения на основе соотношения величин между третьим пороговым значением и расстоянием между движущимися впереди соседними транспортными средствами. Однако, фактически, изобретение не ограничено вышеописанными примерами.
[0072] С другой точки зрения, контроллер 6 тормоза, контроллер 7 приведения в движение/рулевого управления, контур 8 давления текучей среды, тормозное устройство 9, устройство 10 приведения в движение/рулевого управления и колеса 11 формируют "блок изменения цели". Блок изменения цели ожидает в позиции сбоку от первого пространства между транспортными средствами, которое является пространством между транспортными средствами между первым движущимися впереди соседним транспортным средством и первым движущимся следом соседним транспортным средством, когда блок 58 определения необходимости ожидания определяет, что ожидание необходимо. С другой стороны, когда блок 58 определения необходимости ожидания определяет, что ожидание является излишним, блок изменения цели перемещает транспортное средство в позицию сбоку от второго пространства между транспортными средствами, соседнего спереди или позади первого пространства между транспортными средствами.
Кроме того, с другой точки зрения, блок изменения цели может быть дисплеем или устройством вывода звука. Блок изменения цели сообщает возможность смены полосы движения и выполнения (или запланированного выполнения) смены полосы движения или необходимости ожидания и необходимости перемещения транспортного средства пассажиру через отображение экрана или вывод звука. Однако, фактически, изобретение не ограничено вышеописанными примерами.
[0073] (Полезные результаты настоящего варианта осуществления)
Настоящий вариант осуществления обеспечивает следующие полезные результаты:
(1) Устройство управления движением согласно настоящему варианту осуществления получает, в позиции сбоку от транспортного средства на соседней полосе движения, соседней по отношению к собственной полосе движения, первое расстояние между транспортными средствами, которое служит в качестве цели для смены полосы движения транспортного средства и является расстоянием между транспортными средствами между первым движущимся впереди соседним транспортным средством в боковом переднем направлении транспортного средства и первым движущимся следом соседним транспортным средством в боковом заднем направлении транспортного средства. Устройство управления движением получает второе расстояние между транспортными средствами, которое является, по меньшей мере, одним расстоянием между транспортными средствами из расстояния между транспортными средствами между первым движущимся следом соседним транспортным средством и вторым движущимся следом соседним транспортным средством в качестве транспортного средства, движущегося следом за ним, и расстояния между транспортными средствами между первым движущимся впереди соседним транспортным средством и вторым движущимся впереди соседним транспортным средством в качестве транспортного средства, движущегося впереди него. Возможность смены полосы движения с собственной полосы движения на соседнюю полосу движения определяется с помощью первого расстояния между транспортными средствами. Когда смена полосы движения с собственной полосы движения на соседнюю полосу движения определяется как невыполнимая, наличие или отсутствие возможности того, что первое расстояние между транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения, определяется с помощью второго расстояния между транспортными средствами. Когда определяется, что существует возможность того, что первое расстояние между транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения, ожидание определяется как необходимое. Когда определяется, что не существует возможности того, что первое расстояние между транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения, ожидание определяется как излишнее.
Таким образом, когда транспортное средство меняет полосы движения, не только с помощью расстояния между транспортными средствами в позиции сбоку от транспортного средства (первого расстояния между транспортными средствами), но также с помощью его второго расстояния между транспортными средствами (второго расстояния между транспортными средствами), прогнозирование влияния движущихся впереди соседних транспортных средств и движущихся следом соседних транспортных средств на соседней полосе движения вследствие смены полосы движения предоставляет возможность определять смену полосы движения с более высокой точностью, чем в традиционных технологиях.
[0074] (2) Предпочтительно, когда ожидание определяется как необходимое, устройство управления движением, описанное выше, вынуждает транспортное средство ожидать в позиции сбоку от первого расстояния между транспортными средствами, которое является расстоянием между транспортными средствами между первым движущимся впереди соседним транспортным средством и первым движущимся следом соседним транспортным средством, и, когда ожидание определяется как излишнее, оно может перемещать транспортное средство в позицию сбоку от второго пространства между транспортными средствами, соседнего спереди или позади первого расстояния между транспортными средствами.
Таким образом, соответствующая операция подготовки к смене полосы движения может выполняться согласно результату определения возможности смены полосы движения.
(3) Вышеописанное устройство управления движением может определять возможность смены полосы движения во второе пространство между транспортными средствами с помощью второго расстояния между транспортными средствами, когда ожидание определяется как излишнее, и может перемещать транспортное средство в позицию сбоку от вышеописанного второго пространства между транспортными средствами, когда смена полосы движения во второе пространство между транспортными средствами определяется как выполнимая.
Таким образом, когда ожидание в позиции сбоку от текущего целевого пространства между транспортными средствами определяется как бесполезное, определение может быть выполнено относительно возможности смены полосы движения в пространство между транспортными средствами, расположенное спереди или позади целевого пространства между транспортными средствами, таким образом, предоставляя возможность выполнения определения возможности смены полосы движения на множестве этапов.
[0075] (4) При этом, расстояние между движущимися следом соседними транспортными средствами предполагается как одно второе расстояние между транспортными средствами. Расстояние между движущимися следом соседними транспортными средствами является расстоянием между транспортными средствами между первым движущимся следом соседним транспортным средством и вторым движущимся следом соседним транспортным средством в качестве транспортного средства, движущегося следом за ним по соседней полосе движения. Когда первое расстояние между транспортными средствами меньше первого порогового значения, вышеописанное устройство 5 управления движением вычисляет минимальное расстояние между движущимися следом транспортными средствами между движущимися следом соседними транспортными средствами, умножая скорость первого движущегося следом соседнего транспортного средства на предварительно заданное минимальное время между движущимися следом соседними транспортными средствами. Дополнительно, вышеописанное устройство 5 управления движением вычисляет второе пороговое значение, представляющее расстояние между транспортными средствами, необходимое для первого движущегося следом соседнего транспортного средства, чтобы расширять первое расстояние между транспортными средствами, посредством сложения минимального расстояния между движущимися следом соседними транспортными средствами, значения (разности), полученного вычитанием первого расстояния между транспортными средствами из первого порогового значения, и предварительно заданного допуска регулировки. Когда расстояние между движущимися следом соседними транспортными средствами больше второго порогового значения, определяется, что существует возможность того, что первое расстояние между транспортными средствами будет больше первого порогового значения. Когда расстояние между движущимися следом соседними транспортными средствами меньше второго порогового значения, определяется, что не существует возможности того, что первое расстояние между транспортными средствами будет больше первого порогового значения.
Таким образом, оценка может быть выполнена о расстоянии, которое может быть предоставлено первым движущимся следом соседним транспортным средством, и определение может быть выполнено с высокой точностью относительно того, предоставляет ли пространство первое движущееся следом соседнее транспортное средство. Дополнительно, даже в ситуации, в которой собственная полоса движения является полосой движения с более высокой скоростью, чем соседняя полоса движения, и первое движущееся следом соседнее транспортное средство не может предоставить пространство, может быть предотвращено то, что транспортное средство не может изменять полосы движения и переходит в состояние ожидания.
(5) Дополнительно, в вышеописанном результате (4), когда транспортное средство опередило первое движущееся впереди соседнее транспортное средство на соседней полосе движения, первое расстояние между транспортными средствами прошлого времени используется в качестве текущего расстояния между движущимися следом соседними транспортными средствами. Например, когда определяется, что не существует возможности того, что первое расстояние между транспортными средствами будет больше первого порогового значения и в случае, в котором собственная полоса движения является полосой движения с более высокой скоростью, чем соседняя полоса движения, транспортное средство опережает первое движущееся впереди соседнее транспортное средство, и первое расстояние между транспортными средствами прошлого времени используется в качестве текущего расстояния между движущимися следом соседними транспортными средствами.
Таким образом, расстояние между транспортными средствами позади целевого пространства может быть оценено.
[0076] (6) Дополнительно, расстояние между движущимися впереди соседними транспортными средствами предполагается как одно второе расстояние между транспортными средствами. Расстояние между движущимися впереди соседними транспортными средствами является расстоянием между транспортными средствами между первым движущимся впереди соседним транспортным средством и вторым движущимся впереди соседним транспортным средством в качестве транспортного средства, движущегося впереди него по соседней полосе движения. Когда первое расстояние между транспортными средствами меньше первого порогового значения, вышеописанное устройство 5 управления движением вычисляет минимальное расстояние между движущимися впереди транспортными средствами между движущимися впереди соседними транспортными средствами, умножая скорость первого движущегося впереди соседнего транспортного средства на предварительно заданное минимальное время между движущимися впереди транспортными средствами. Дополнительно, устройство 5 управления движением вычисляет третье пороговое значение, представляющее расстояние между транспортными средствами, необходимое для первого движущегося впереди соседнего транспортного средства, чтобы расширять первое расстояние между транспортными средствами, посредством сложения минимального расстояния между движущимися впереди транспортными средствами, значения, полученного вычитанием первого расстояния между транспортными средствами из первого порогового значения, и предварительно заданного допуска регулировки. Когда расстояние между движущимися впереди соседними транспортными средствами больше третьего порогового значения, определяется, что существует возможность того, что первое расстояние между транспортными средствами будет больше первого порогового значения. Когда расстояние между движущимися впереди соседними транспортными средствами меньше третьего порогового значения, определяется, что не существует возможности того, что первое расстояние между транспортными средствами будет больше первого порогового значения.
Таким образом, оценка может быть выполнена о расстоянии, которое может быть предоставлено первым движущимся впереди соседним транспортным средством, и определение может быть выполнено с высокой точностью относительно того, предоставляет ли пространство первое движущееся впереди соседнее транспортное средство. Дополнительно, даже в ситуации, в которой собственная полоса движения является полосой движения с более низкой скоростью, чем соседняя полоса движения, и первое движущееся впереди соседнее транспортное средство не может предоставить пространство, может быть предотвращено то, что транспортное средство не может изменять полосы движения и переходит в состояние ожидания.
(7) Дополнительно, в вышеописанном результате (6), в случае, в котором транспортное средство было опережено первым движущимся следом соседним транспортным средством, первое расстояние между транспортными средствами прошлого времени используется в качестве расстояния между движущимися впереди соседними транспортными средствами. Например, когда определяется, что не существует возможности того, что первое расстояние между транспортными средствами будет больше первого порогового значения и в случае, в котором собственная полоса движения является полосой движения с более низкой скоростью, чем соседняя полоса движения, транспортное средство предоставляет возможность первому движущемуся следом соседнему транспортному средству проезжать (двигаться впереди), и первое расстояние между транспортными средствами прошлого времени используется в качестве текущего расстояния между движущимися впереди соседними транспортными средствами. Таким образом, расстояние между транспортными средствами впереди целевого расстояния может быть оценено.
[0077] Настоящая заявка испрашивает приоритет японской патентной заявки № 2013-213953 (поданной 11 октября 2013 года), полное содержимое которой содержится по ссылке как часть настоящего изобретения.
В то время как настоящее изобретение было описано со ссылкой на ограниченное число вариантов осуществления в данном документе, рамки изобретения не ограничиваются этим, и специалистам в области техники будет очевидно, что каждый из вариантов осуществления может быть модифицирован на основе вышеприведенного раскрытия.
Список номеров ссылок
[0078] 1: Рабочий переключатель управления
2: Датчик скорости колеса
3: Наружное распознающее устройство
4: Устройство связи
5: Устройство управления движением
51: Блок установки состояния управления
52: Блок определения состояния обнаружения окружающих транспортных средств
53: Блок вычисления скорости окружающих транспортных средств
54: Блок определения необходимости смены полосы движения
55: Блок получения первого расстояния между транспортными средствами
56: Блок получения второго расстояния между транспортными средствами
57: Блок определения возможности смены полосы движения
58: Блок определения необходимости ожидания
6: Контроллер тормоза
7: Контроллер приведения в движение/рулевого управления
8: Контур давления текучей среды
9: Тормозное устройство
10: Устройство приведения в движение/рулевого управления
11: Колесо
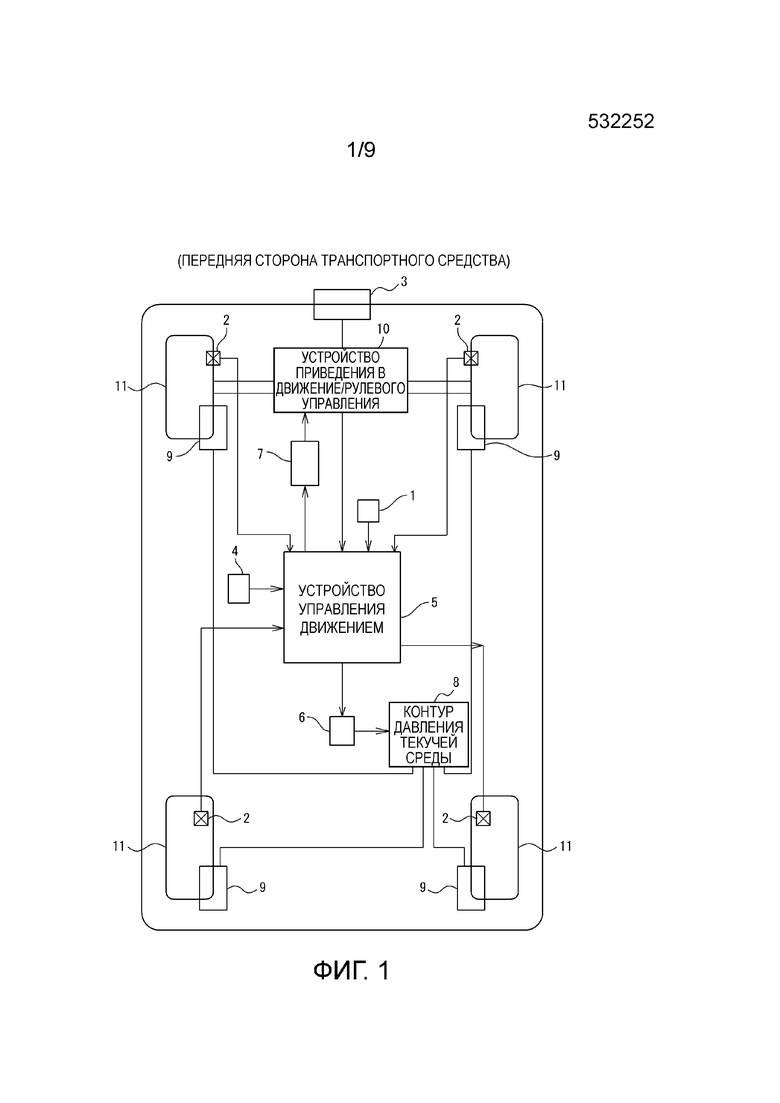
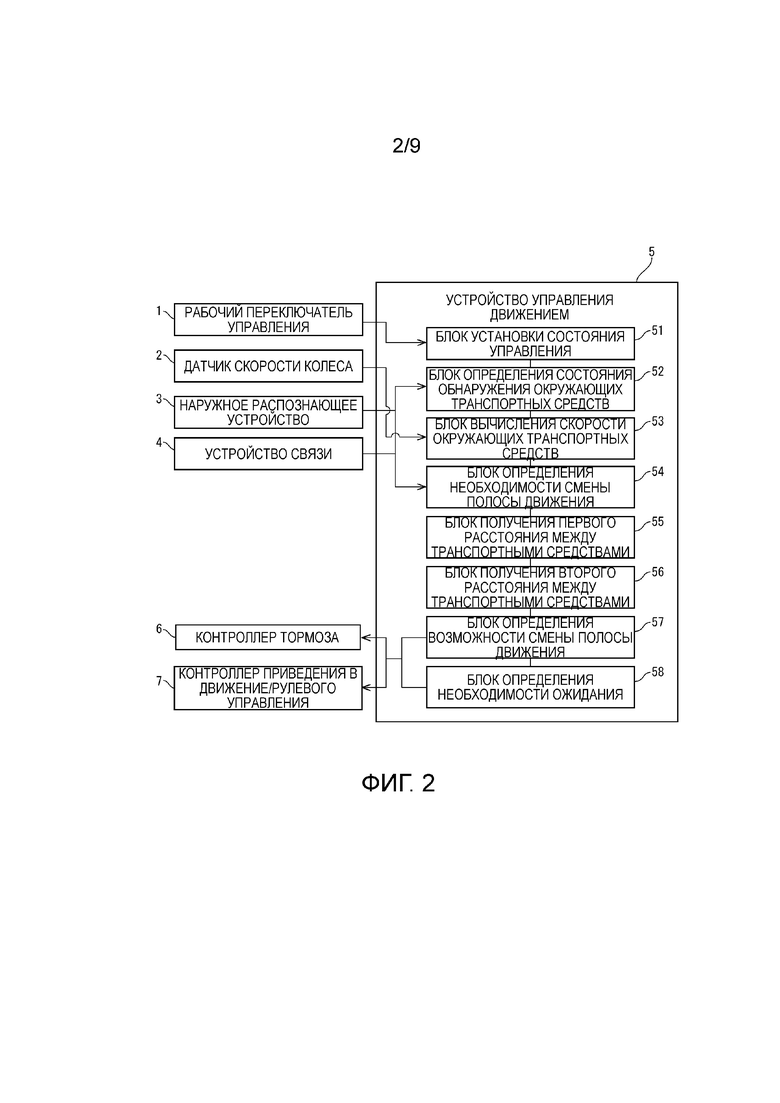
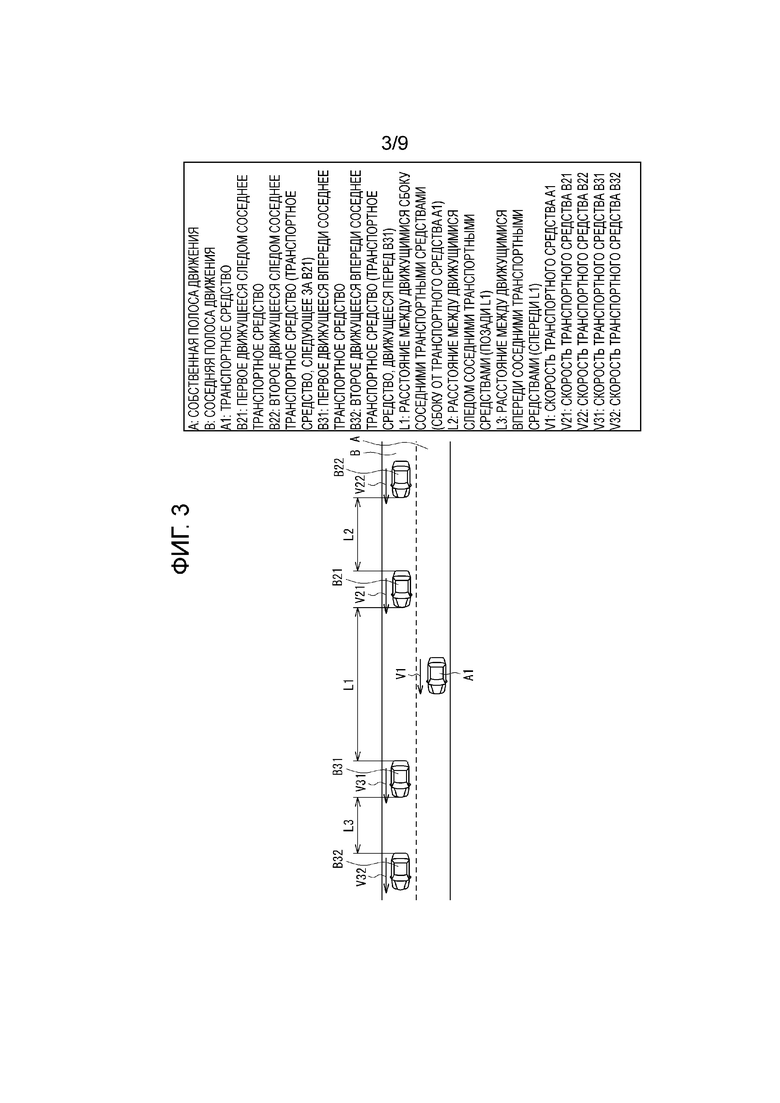
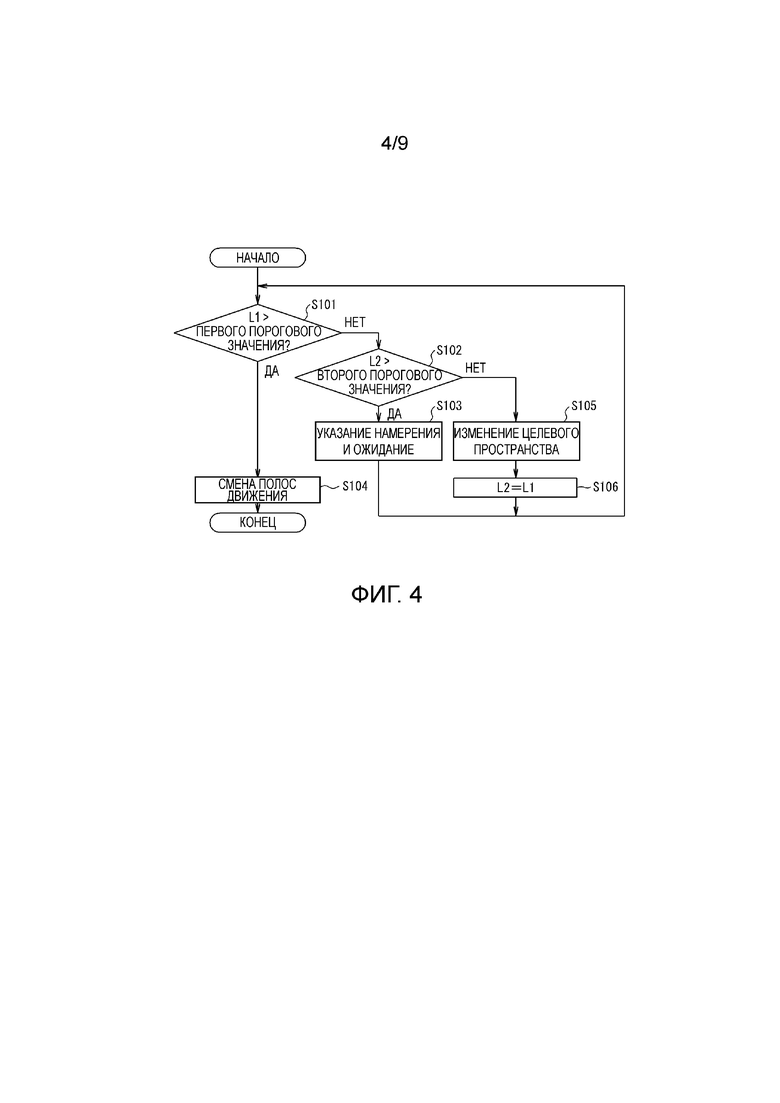
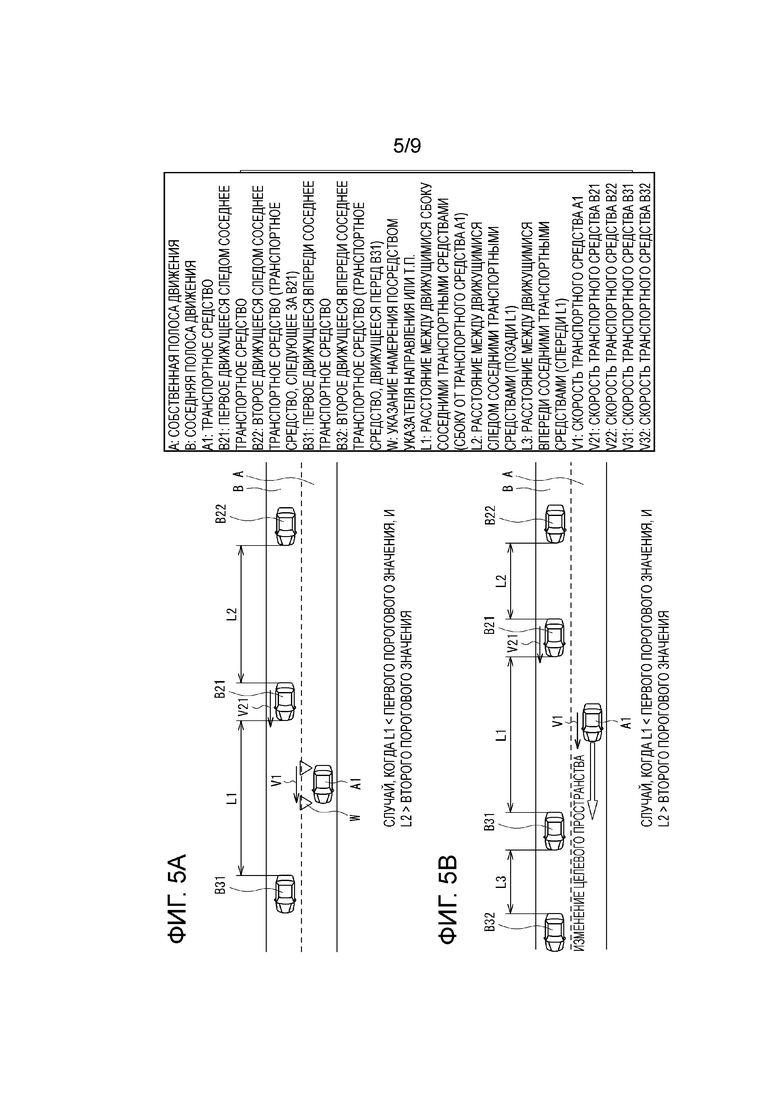
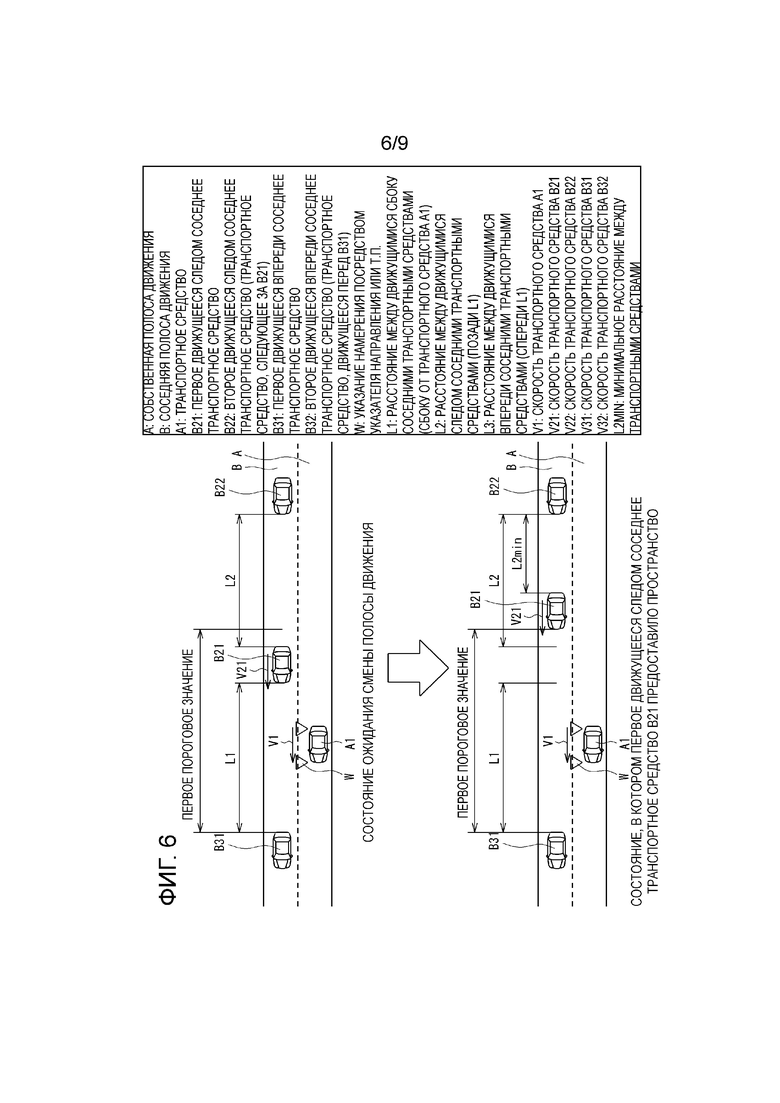
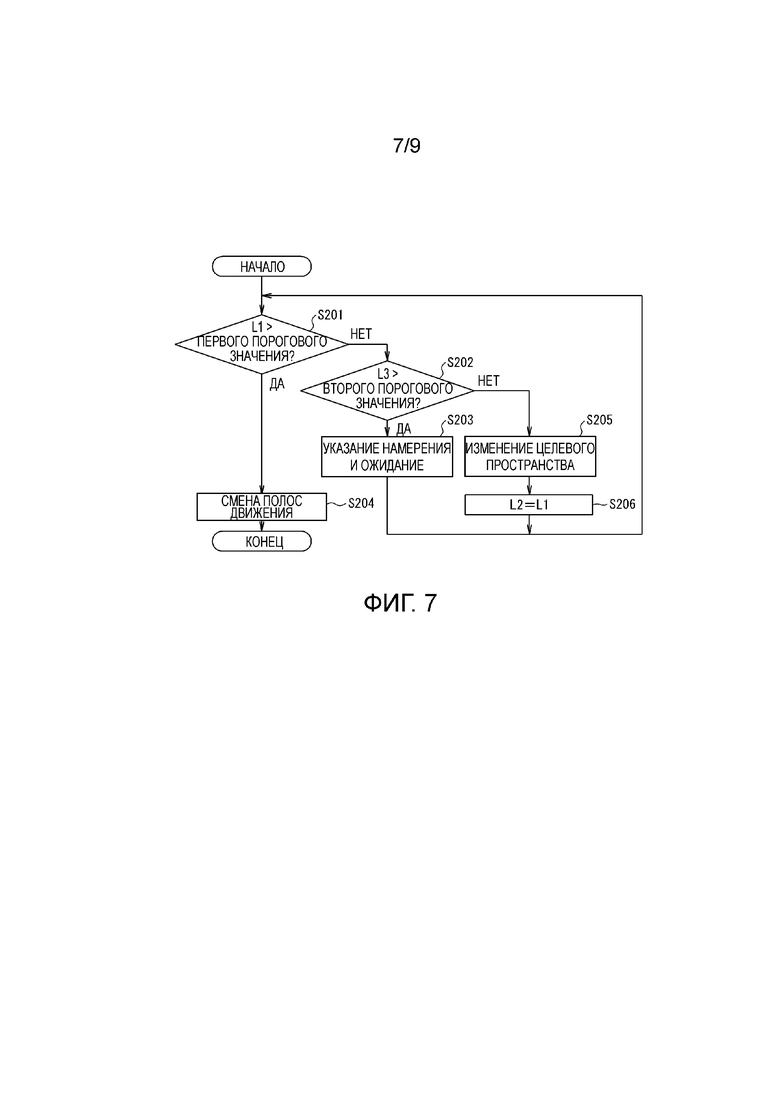
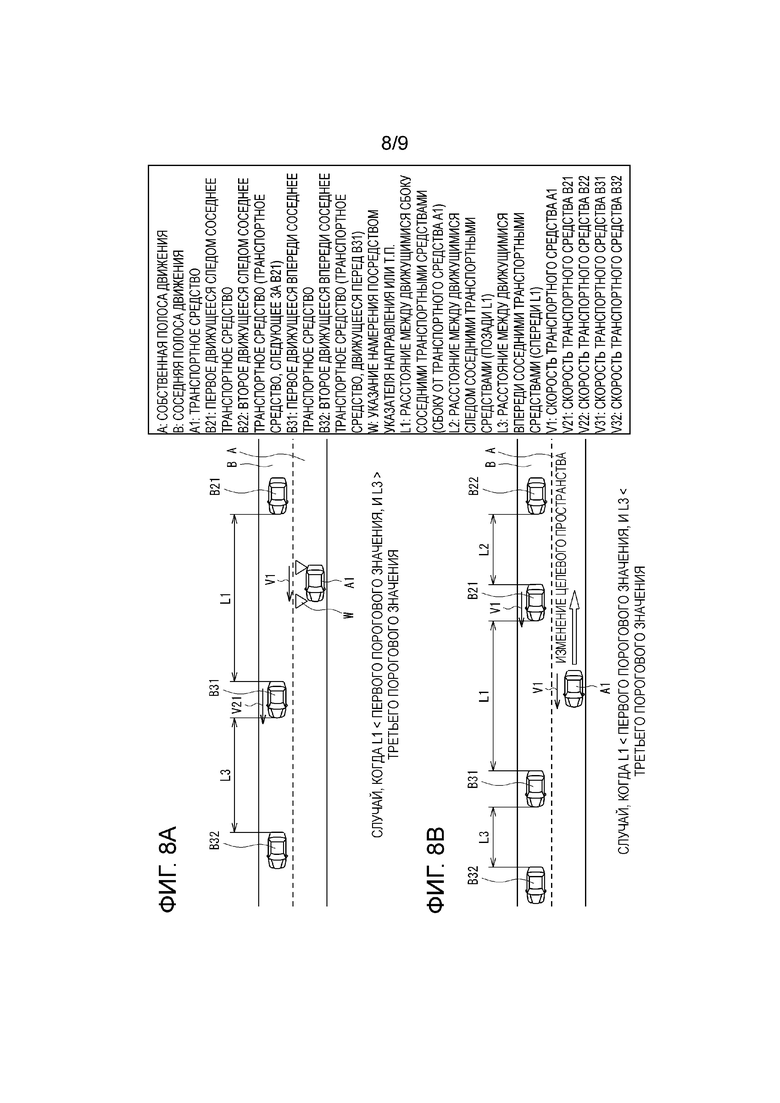
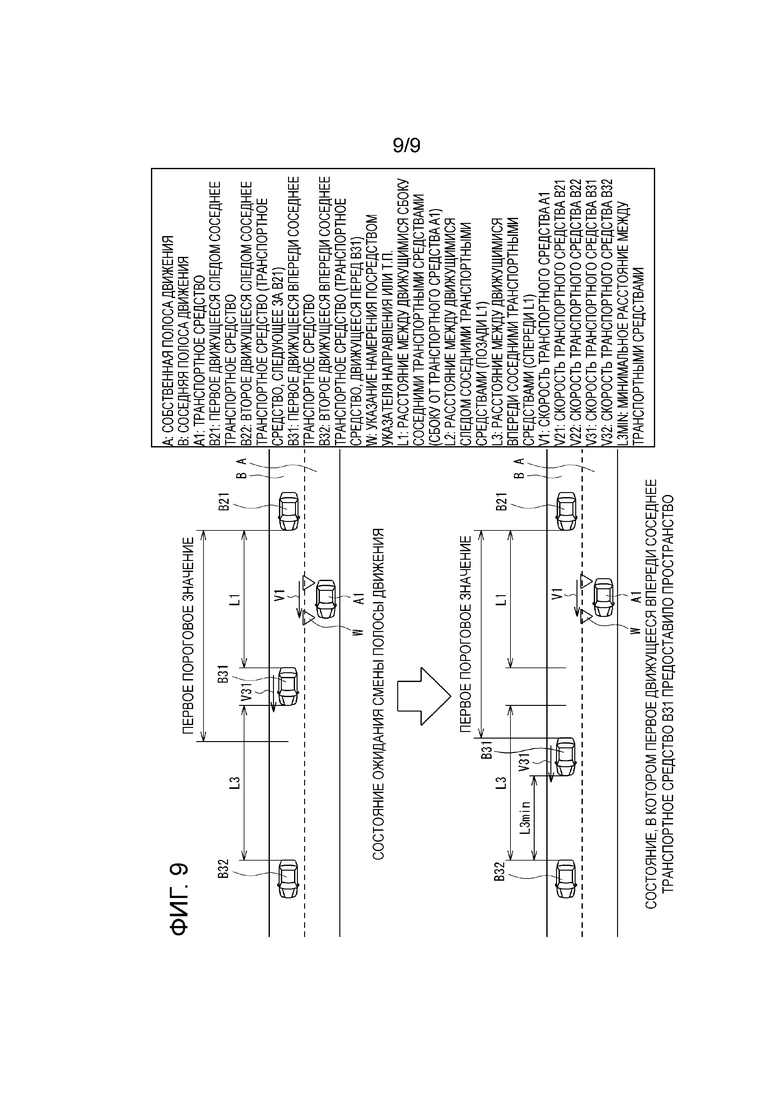
Изобретение относится к устройству управления движением и способу управления движением, которые способствуют смене полосы движения транспортного средства. Возможность смены полосы движения транспортного средства определяется с помощью первого расстояния между транспортными средствами, которое служит в качестве цели для смены полосы движения транспортного средства на соседней полосе движения, соседней по отношению к полосе движения, по которой транспортное средство движется. Когда смена полосы движения определяется как невыполнимая, наличие или отсутствие возможности того, что первое расстояние между транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения, определяется с помощью второго расстояния между транспортными средствами, расположенного спереди или позади первого расстояния между транспортными средствами. Когда определяется, что существует возможность, ожидание определяется как необходимое, а когда определяется, что не существует такой возможности, ожидание определяется как излишнее. Обеспечивается недопущение продолжения ожидания транспортным средством в позиции, поперечной относительно того же расстояния между транспортными средствами, независимо от ситуации на соседней полосе движения при смене полос движения с собственной полосы движения на соседнюю полосу движения. 2 н. и 7 з.п. ф-лы, 9 ил. 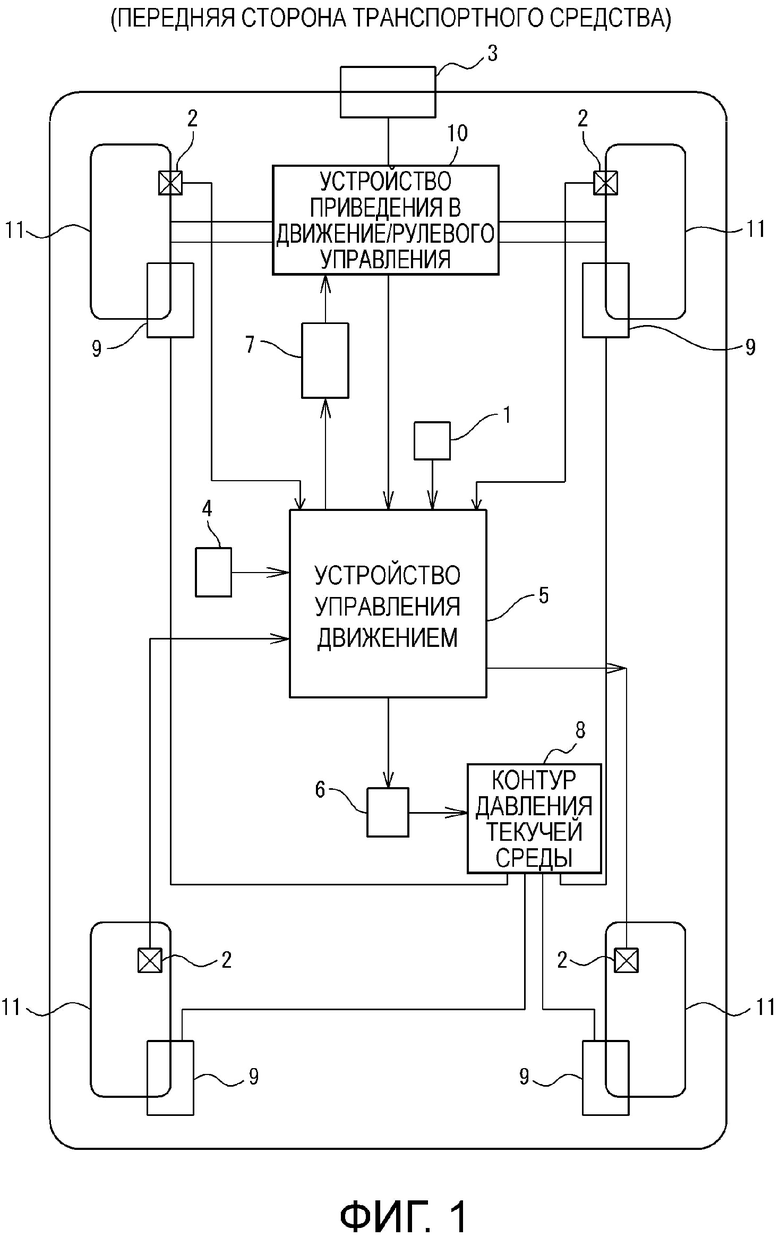
1. Устройство управления движением, содержащее:
блок получения первого расстояния между транспортными средствами, выполненный с возможностью получать, в позиции сбоку от транспортного средства на соседней полосе движения, соседней с полосой движения, по которой транспортное средство движется, первое расстояние между транспортными средствами, которое служит в качестве цели для смены полосы движения транспортного средства и является расстоянием между транспортными средствами между первым движущимся впереди соседним транспортным средством в боковом переднем направлении транспортного средства и первым движущимся следом соседним транспортным средством в боковом заднем направлении транспортного средства;
блок получения второго расстояния между транспортными средствами, выполненный с возможностью получать второе расстояние между транспортными средствами, которое является, по меньшей мере, одним расстоянием между транспортными средствами из расстояния между транспортными средствами между первым движущимся следом соседним транспортным средством и вторым движущимся следом соседним транспортным средством в качестве транспортного средства, движущегося следом за первым движущимся следом соседним транспортным средством, и расстояния между транспортными средствами между первым движущимся впереди соседним транспортным средством и вторым движущимся впереди соседним транспортным средством в качестве транспортного средства, движущегося впереди первого движущегося впереди соседнего транспортного средства;
блок определения возможности смены полосы движения, выполненный с возможностью определять возможность смены полосы движения с полосы движения, по которой транспортное средство движется, на соседнюю полосу движения с помощью первого расстояния между транспортными средствами; и
блок определения необходимости ожидания, выполненный с возможностью, когда блок определения возможности смены полосы движения определяет, что смена полосы движения с полосы движения, по которой транспортное средство движется, на соседнюю полосу движения не является выполнимой, определять наличие или отсутствие возможности того, что первое расстояние между транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения с помощью второго расстояния между транспортными средствами, определять, что ожидание необходимо, когда определяется, что существует возможность того, что первое расстояние между транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения, и определять, что ожидание является излишним, когда определяется, что не существует возможности того, что первое расстояние между транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения.
2. Устройство управления движением по п. 1, дополнительно содержащее блок изменения цели, выполненный с возможностью, когда блок определения необходимости ожидания определяет, что ожидание необходимо, вынуждать транспортное средство ожидать в позиции сбоку от первого пространства между транспортными средствами, которое является пространством между транспортными средствами между первым движущимся впереди соседним транспортным средством и первым движущимся следом соседним транспортным средством, а когда блок определения необходимости ожидания определяет, что ожидание является излишним, перемещать транспортное средство в позицию сбоку от второго пространства между транспортными средствами, соседнего спереди или позади относительно первого пространства между транспортными средствами.
3. Устройство управления движением по п. 2, при этом блок определения необходимости ожидания выполнен с возможностью определять возможность смены полосы движения во второе пространство между транспортными средствами с помощью второго расстояния между транспортными средствами, когда определяется, что ожидание является излишним, и
блок изменения цели выполнен с возможностью перемещать транспортное средство в позицию сбоку от второго пространства между транспортными средствами, когда блок определения необходимости ожидания определяет, что ожидание является излишним и что смена полосы движения во второе пространство между транспортными средствами является выполнимой.
4. Устройство управления движением по любому из пп. 1-3,
при этом блок получения второго расстояния между транспортными средствами выполнен с возможностью получать расстояние между движущимися следом соседними транспортными средствами, которое является расстоянием между транспортными средствами между первым движущимся следом соседним транспортным средством и вторым движущимся следом соседним транспортным средством,
блок определения возможности смены полосы движения включает в себя:
блок вычисления первого порогового значения, выполненный с возможностью вычислять первое пороговое значение посредством умножения скорости транспортного средства на предварительно заданное время между транспортными средствами; и
блок определения первого порогового значения, выполненный с возможностью определять, что смена полосы движения с полосы движения, по которой транспортное средство движется, на соседнюю полосу движения является выполнимой, когда первое расстояние между транспортными средствами больше первого порогового значения, и определять, что смена полосы движения с полосы движения, по которой транспортное средство движется, на соседнюю полосу движения не является выполнимой, когда первое расстояние между транспортными средствами меньше первого порогового значения, и
блок определения необходимости ожидания включает в себя:
блок вычисления второго порогового значения, выполненный с возможностью вычислять минимальное расстояние между движущимися следом транспортными средствами между движущимися следом соседними транспортными средствами посредством умножения скорости первого движущегося следом соседнего транспортного средства на предварительно заданное минимальное время между движущимися следом транспортными средствами, когда смена полосы движения с полосы движения, по которой транспортное средство движется, на соседнюю полосу движения определяется как невыполнимая, и вычислять второе пороговое значение посредством сложения минимального расстояния между движущимися следом транспортными средствами, значения, полученного вычитанием первого расстояния между транспортными средствами из первого порогового значения, и предварительно заданного допуска регулировки; и
блок определения второго порогового значения, выполненный с возможностью определять, что существует возможность того, что первое расстояние между транспортными средствами будет больше первого порогового значения, когда расстояние между движущимися следом соседними транспортными средствами больше второго порогового значения, и определять, что не существует возможности того, что первое расстояние между транспортными средствами будет больше первого порогового значения, когда расстояние между движущимися следом соседними транспортными средствами меньше второго порогового значения.
5. Устройство управления движением по п. 4, при этом блок определения необходимости ожидания выполнен с возможностью устанавливать первое расстояние между транспортными средствами прошлого времени в расстояние между движущимися следом соседними транспортными средствами, когда упомянутое транспортное средство опережает движущееся впереди соседнее транспортное средство на соседней полосе движения.
6. Устройство управления движением по любому из пп. 1-3,
при этом блок получения второго расстояния между транспортными средствами выполнен с возможностью получать расстояние между движущимися впереди соседними транспортными средствами, которое является расстоянием между транспортными средствами между первым движущимся впереди соседним транспортным средством и вторым движущимся впереди соседним транспортным средством,
блок определения возможности смены полосы движения включает в себя:
блок вычисления первого порогового значения, выполненный с возможностью вычислять первое пороговое значение посредством умножения скорости транспортного средства на предварительно заданное время между транспортными средствами; и
блок определения первого порогового значения, выполненный с возможностью определять, что смена полосы движения с полосы движения, по которой транспортное средство движется, на соседнюю полосу движения является выполнимой, когда первое расстояние между транспортными средствами больше первого порогового значения, и определять, что смена полосы движения с полосы движения, по которой транспортное средство движется, на соседнюю полосу движения не является выполнимой, когда первое расстояние между транспортными средствами меньше первого порогового значения, и
блок определения необходимости ожидания включает в себя:
блок вычисления третьего порогового значения, выполненный с возможностью вычислять минимальное расстояние между движущимися впереди транспортными средствами между движущимися впереди соседними транспортными средствами посредством умножения скорости первого движущегося впереди соседнего транспортного средства на предварительно заданное минимальное время между движущимися впереди транспортными средствами, когда смена полосы движения с полосы движения, по которой транспортное средство движется, на соседнюю полосу движения определяется как невыполнимая, и вычислять третье пороговое значение посредством сложения минимального расстояния между движущимися впереди транспортными средствами, значения, полученного вычитанием первого расстояния между транспортными средствами из первого порогового значения, и предварительно заданного допуска регулировки; и
блок определения третьего порогового значения, выполненный с возможностью определять, что существует возможность того, что первое расстояние между транспортными средствами будет больше первого порогового значения, когда расстояние между движущимися впереди соседними транспортными средствами больше третьего порогового значения, и определять, что не существует возможности того, что первое расстояние между транспортными средствами будет больше первого порогового значения, когда расстояние между движущимися впереди соседними транспортными средствами меньше третьего порогового значения.
7. Устройство управления движением по п. 6, при этом блок определения необходимости ожидания выполнен с возможностью устанавливать первое расстояние между транспортными средствами прошлого времени в расстояние между движущимися впереди соседними транспортными средствами, когда первое движущееся следом транспортное средство опережает упомянутое транспортное средство.
8. Способ управления движением, содержащий этапы, на которых:
получают, в позиции сбоку от транспортного средства на соседней полосе движения, соседней по отношению к полосе движения, по которой транспортное средство движется, первое расстояние между транспортными средствами, которое служит в качестве цели для смены полосы движения транспортного средства и является расстоянием между транспортными средствами между первым движущимся впереди соседним транспортным средством в боковом переднем направлении транспортного средства и первым движущимся следом соседним транспортным средством в боковом заднем направлении транспортного средства;
получают второе расстояние между транспортными средствами, которое является, по меньшей мере, одним расстоянием между транспортными средствами из расстояния между транспортными средствами между первым движущимся следом соседним транспортным средством и вторым движущимся следом соседним транспортным средством в качестве транспортного средства, движущегося следом за первым движущимся следом соседним транспортным средством, и расстояния между транспортными средствами между первым движущимся впереди соседним транспортным средством и вторым движущимся впереди соседним транспортным средством в качестве транспортного средства, движущегося впереди первого движущегося впереди соседнего транспортного средства;
определяют возможность смены полосы движения с полосы движения, по которой транспортное средство движется, на соседнюю полосу движения с помощью первого расстояния между транспортными средствами;
когда смена полосы движения с полосы движения, по которой транспортное средство движется, на соседнюю полосу движения определяется как невыполнимая, определяют наличие или отсутствие возможности того, что первое расстояние между транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения, с помощью второго расстояния между транспортными средствами;
когда определяют, что существует возможность того, что первое расстояние между транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения, определяют, что ожидание необходимо; и
когда определяют, что не существует возможности того, что первое расстояние между транспортными средствами расширится до протяженности, которая предоставляет возможность для смены полосы движения, определяют, что ожидание является излишним.
9. Способ управления движением по п. 8, при этом, когда ожидание определяется как необходимое, вынуждают транспортное средство ожидать в позиции сбоку от первого пространства между транспортными средствами, которое является пространством между транспортными средствами между первым движущимся впереди соседним транспортным средством и первым движущимся следом соседним транспортным средством, и
когда ожидание определяется как излишнее, перемещают транспортное средство в позицию сбоку от второго пространства между транспортными средствами, соседнего спереди или позади относительно первого пространства между транспортными средствами.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ОБЪЕКТОМ, ПЕРЕМЕЩАЮЩИМСЯ В ПЕРЕДНЕБОКОВОЙ ЗОНЕ ТРАНСПОРТНОГО СРЕДСТВА В НАПРАВЛЕНИИ, ПЕРЕСЕКАЮЩЕМ ТРАЕКТОРИЮ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2402445C1 |
| DE 102011106746 A1, 03.01.2013. | |||

