ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001]
Настоящее изобретение относится к способу помощи при движении и к устройству помощи при движении.
УРОВЕНЬ ТЕХНИКИ
[0002]
Традиционно были известны устройства помощи при смене полосы движения, которые помогают при смене полосы движения путем «вклинивания» в полосу движения (см. Патентную литературу 1). В Патентной литературе 1 на основе разницы в скорости между предшествующим транспортным средством и следующим транспортным средством в полосе движения, в которую рассматриваемое транспортное средство пытается выехать, и расстоянием между транспортными средствами между предшествующим транспортным средством и следующим транспортным средством, разрешает ли следующее транспортное средство «вклинивание» рассматриваемого транспортного средства.
СПИСОК ЦИТАТ
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003]
Патентный документ 1: Публикация заявки на патент Японии № 2016-004425
Патентный документ 2: Публикация международной заявки № WO2017/171040
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0004]
Однако в заторах часто разница в скорости между предшествующим транспортным средством и следующим транспортным средством мала, и расстояние между транспортными средствами между предшествующим транспортным средством и следующим транспортным средством также является малым. По этой причине возникла проблема, заключающаяся в том, что невозможно оказать надлежащую помощь при «вклинивании» рассматриваемого транспортного средства, поскольку трудно определить, разрешено ли «вклинивание» рассматриваемого транспортного средства, на основе разницы в скорости и расстояния между транспортными средствами.
[0005]
Настоящее изобретение создано с учетом вышеописанной проблемы, и его задача состоит в том, чтобы предоставить способ помощи при движении и устройство помощи при движении для случая, когда рассматриваемая полоса движения, по которой движется рассматриваемое транспортное средство, сливается с соседней полосой движения, которые содействуют правильному въезду рассматриваемого транспортного средства в поток движущихся машин в соседнюю полосу движения.
РЕШЕНИЕ ПРОБЛЕМЫ
[0006]
Одним из аспектов настоящего изобретения является способ помощи при движении для случая, когда рассматриваемая полоса движения, по которой движется рассматриваемое транспортное средство, сливается с соседней полосой движения, который содействует въезду рассматриваемого транспортного средства в поток движущихся машин в соседнюю полосу движения. Способ помощи при движении выбирает транспортное средство назначения въезда в поток движущихся машин, которое будет двигаться впереди или позади рассматриваемого транспортного средства, когда рассматриваемое транспортное средство въезжает в поток движущихся машин в соседнюю полосу движения, на основе истории того, позволили ли другие транспортные средства, движущиеся по соседней полосе движения, въезд в поток движущихся машин первого предшествующего транспортного средства, движущегося впереди рассматриваемого транспортного средства на рассматриваемой полосе движения, и местоположений других транспортных средств, движущихся по соседней полосе движения в направлении полосы движения в пределах секции, на которой возможен въезд в поток движущихся машин c рассматриваемой полосы движения на соседнюю полосу движения.
ПОЛОЖИТЕЛЬНЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0007]
Согласно аспекту настоящего изобретения, в случае, когда рассматриваемая полоса движения, по которой движется рассматриваемое транспортное средство, сливается с соседней полосой движения, можно содействовать правильному въезду рассматриваемого транспортного средства в поток движущихся машин в соседнюю полосу движения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
[Фиг. 1] Фиг. 1 - схематическая диаграмма, иллюстрирующая общую конфигурацию устройства управления транспортным средством, включающего в себя устройство помощи при движении, согласно первому варианту осуществления.
[Фиг. 2] Фиг. 2 представляет собой схему, иллюстрирующую пример структуры дороги, где рассматриваемая полоса L1 движения сливается с соседней полосой L2 движения, а затем рассматриваемая полоса L1 движения отклоняется от соседней полосы L2 движения после прохождения через заранее определенную секцию Pmer въезда в поток движущихся машин, и пример распределений первых ожиданий сбоя въезда в поток движущихся машин и вторых ожиданий сбоя въезда в поток движущихся машин для дорожной конструкции.
[Фиг. 3] Фиг. 3 - это блок-схема последовательности операций, описывающая процедуру для вычисления первых ожиданий сбоя въезда в поток движущихся машин в способе помощи при движении согласно первому варианту осуществления.
[Фиг. 4] Фиг. 4 - это блок-схема, описывающая процедуру для вычисления вторых ожиданий сбоя въезда в поток движущихся машин в способе помощи при движении согласно первому варианту осуществления.
[Фиг. 5] Фиг. 5 - это блок-схема, описывающая процедуру объединения первых ожиданий сбоя въезда в поток движущихся машин и вторых ожиданий сбоя въезда в поток движущихся машин и идентификации транспортного средства назначения въезда в поток движущихся машин в способе помощи при движении согласно первому варианту осуществления.
[Фиг. 6] Фиг. 6 - схематическая диаграмма, иллюстрирующая общую конфигурацию устройства управления транспортным средством, включая устройство помощи при движении, согласно второму варианту осуществления.
[Фиг. 7A] Фиг. 7A - это схема, иллюстрирующая пример сцены движения, в которой эффективно функционирует блок 30b определения допуска на въезд в поток движущихся машин согласно второму варианту осуществления.
[Фиг. 7B] Фиг. 7B представляет собой график, иллюстрирующий временные изменения скоростей v, расстояний между транспортными средствами (Dce, Dcd) и временных интервалов (Tce, Tcd) другого транспортного средства 2e, другого транспортного средства 2d (первое предшествующее транспортное средство, транспортное средство - цель следования) и другого транспортного средства 2c (транспортного средства назначения въезда в поток движущихся машин) в сцене движения, проиллюстрированной на фиг. 7A.
[Фиг. 8] Фиг. 8 - это блок-схема последовательности операций, описывающая процедуру для вычисления первых ожиданий сбоя въезда в поток движущихся машин в способе помощи при движении согласно второму варианту осуществления.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0009]
Варианты осуществления описаны со ссылкой на чертежи. В содержании чертежей одни и те же части обозначены одинаковыми ссылочными позициями, чтобы опустить описания.
[0010]
Устройство помощи при движении согласно вариантам осуществления эффективно функционирует в сцене движения, как, например, проиллюстрировано на фиг. 2. На фиг. 2 рассматриваемое транспортное средство 1 движется по рассматриваемой полосе L1 движения. Рассматриваемая полоса L1 движения сливается с другой полосой L2 движения, а затем рассматриваемая полоса L1 движения отклоняется назад от другой полосы L2 движения после прохождения через заранее определенную секцию Pmer въезда в поток движущихся машин. Транспортные средства, движущиеся по рассматриваемой полосе L1 движения или полосе L2 движения, могут менять полосу движения в обоих направлениях в пределах секции Pmer въезда в поток движущихся машин. В дальнейшем другая полоса L2 движения упоминается как «соседняя полоса L2 движения».
[0011]
В этом случае «слияние полос (L1, L2) движения» указывает на состояние, в котором две полосы (L1, L2) движения, первоначально отделенные друг от друга, должны быть смежными друг с другом, а также транспортное средство, движущееся по одной полосе движения две полосы движения (L1, L2) должны иметь возможность смены полосы движения на другую полосу движения. Секция Pmer въезда в поток движущихся машин заканчивается в заранее определенной точке (конечной точке). То есть невозможно сменить полосу движения после конечной точки. Обратите внимание, что не имеет значения, исчезнет ли одна из двух полос (L1, L2) движения или отклонится назад, как показано на фиг. 2, после конечной точки. Любой случай приемлем, если можно определить конечную точку секции Pmer въезда в поток движущихся машин в направлении полосы движения. Это означает, что даже случае, отличном от показанного на фиг. 2, например, сцена движения, когда часть нескольких полос движения на дороге с односторонним движением, которая позволяет менять полосу движения в нескольких направлениях, закрывается из-за остановившегося транспортного средства, конструкции и т.п., все еще можно определить местоположение остановившегося транспортного средства или конструкции как конечную точку секции Pmer въезда в поток движущихся машин. Таким образом, даже в этой сцене движения устройство помощи при движении согласно вариантам осуществления функционирует эффективно, как на фиг. 2.
[0012]
Рассматриваемое транспортное средство 1 пытается сменить полосу движения (что в дальнейшем именуется как «въезд в поток движущихся машин») с рассматриваемой полосы L1 движения на соседнюю полосу L2 движения. Вокруг секции Pmer въезда в поток движущихся машин есть другое транспортное средство 2d, въезжающее в поток движущихся машин в соседнюю полосу L2 движения из рассматриваемой полосы L1 движения, как это делает рассматриваемое транспортное средство 1, а также другие транспортные средства 2a, 2b, 2c, 2e и 2f, движущиеся по соседней полосе L2 движения. К другим транспортным средствам 2a, 2b, 2c, 2e и 2f, движущимся по соседней полосе L2 движения, относятся не только другие транспортные средства, движущиеся по соседней полосе L2 движения до секции Pmer въезда в поток движущихся машин, но также и другие транспортные средства, которые двигались по рассматриваемой полосе L1 движения до секции Pmer въезда в поток движущихся машин, но въехали в поток движущихся машин в соседнюю полосу L2 движения в секции Pmer въезда в поток движущихся машин.
[0013]
Другие транспортные средства (с 2a по 2f), движущиеся по соседней полосе L2 движения, образуют линию транспортных средств. Другими словами, множество других транспортных средств (с 2a по 2f), движущихся по соседней полосе L2 движения, движутся с примерно одинаковыми скоростями, имея примерно одинаковые расстояния между транспортными средствами. Пример этого показан на фиг. 2 как сцена движения, где соседняя полоса L2 движения перегружена. При этом множество других транспортных средств (с 2a по 2f) движется с низкой скоростью (30 км или меньше), имея при этом узкое расстояние между транспортными средствами (от 1,0 м до 3,0 м) в соседней полосе L2 движения.
[0014]
В сцене движения, как описано выше, рассматриваемое транспортное средство 1 планирует въехать в поток движущихся машин с рассматриваемой полосы L1 движения в соседнюю полосу L2 движения в секции Pmer въезда в поток движущихся машин. Рассматриваемое транспортное средство 1 определяет, какое транспортное средство из множества других транспортных средств (с 2a по 2f), движущихся по соседней полосе L2 движения, подходит рассматриваемому транспортному средству 1 для въезда в поток движущихся машин перед ним. То есть рассматриваемое транспортное средство 1 определяет, какое из других транспортных средств (с 2a по 2f) уступит дорогу рассматриваемому транспортному средству 1.
[0015]
Однако, когда другие транспортные средства (2a - 2f) образуют линию транспортных средств, другие транспортные средства не имеют или имеют небольшую разницу в их скоростях и расстояниях между транспортными средствами, и, таким образом, трудно выбрать одно из других транспортных средств (от 2a до 2f).
[0016]
Устройство помощи при движении согласно вариантам осуществления использует, по меньшей мере, историю (историю въезда в поток движущихся машин) въезда в поток движущихся машин других транспортных средств (с 2a по 2f), движущихся по рассматриваемой полосе L1 движения или соседней полосе L2 движения, для идентификации другого транспортного средства (любого из 2a-2f), которое уступит дорогу другим транспортным средствам (с 2a по 2f). В частности, на основе истории въезда в поток движущихся машин устройство помощи при движении вычисляет для каждого из других транспортных средств (с 2a по 2f) ожидание того, что рассматриваемое транспортное средство 1 не сможет въехать в поток движущихся машин в соседнюю полосу L2 движения (ожидание сбоя въезда в поток движущихся машин). Затем, на основе ожиданий сбоя въезда в поток движущихся машин, другое транспортное средство (любое из 2a - 2f), которое уступит дорогу, идентифицируется из других транспортных средств (2a - 2f). «История въезда в поток движущихся машин» - это история действий, которые каждое из других транспортных средств (с 2a по 2f), движущихся по рассматриваемой полосе L1 движения или соседней полосе L2 движения, выполняло в секции Pmer въезда в поток движущихся машин. «Ожидание сбоя въезда в поток движущихся машин» указывает вероятность того, что рассматриваемое транспортное средство 1 не сможет въехать в поток движущихся машин при попытке въехать в поток движущихся машин между другими транспортными средствами (с 2a по 2f) и другим транспортным средством (предшествующим транспортным средством), движущимся впереди других транспортных средств (с 2a по 2f). Другими словами, «ожидание сбоя въезда в поток движущихся машин» - это ожидание того, что другие транспортные средства (с 2a по 2f) отклонят запрос на въезд в поток движущихся машин от рассматриваемого транспортного средства 1. Излишне говорить, что ожидание или вероятность «успеха въезда в поток движущихся машин» может использоваться вместо «сбоя въезда в поток движущихся машин». Например, другое транспортное средство (любое из 2a - 2f), которое уступит дорогу, может быть идентифицировано с использованием «ожидания успеха въезда в поток движущихся машин» вместо «ожидания сбоя въезда в поток движущихся машин».
[0017]
Согласно вариантам осуществления можно сделать правильное определение въезда в поток движущихся машин рассматриваемого транспортного средства 1 с соседней полосой L2 движения, принимая во внимание не только текущее поведение других транспортных средств (2a - 2f), но также прошлые действия другие транспортные средства (2a - 2f). Далее подробно описываются способ помощи при движении и устройство помощи при движении согласно первому варианту осуществления и второму варианту осуществления. Обратите внимание, что сцена движения, показанная на фиг. 2, является примером сцены движения, в которой способ помощи при движении и устройство помощи при движении согласно первому варианту осуществления и второму варианту осуществления функционируют эффективно, и объем применения способа помощи при движении и устройство помощи при движении согласно первому варианту осуществления и второму варианту осуществления не ограничено сценой движения.
[0018]
Первый вариант осуществления
Общая конфигурация устройства управления транспортным средством, включая устройство помощи при движении, согласно первому варианту осуществления описывается со ссылкой на фиг. 1. Устройство помощи при движении согласно первому варианту осуществления для случая, когда рассматриваемая полоса L1 движения, по которой движется рассматриваемое транспортное средство 1, сливается с соседней полосой L2 движения, смежной с рассматриваемой полосой L1 движения перед рассматриваемым транспортным средством 1, содействует въезду в поток движущихся машин рассматриваемого транспортного средства 1 в соседнюю полосу L2 движения. Устройство управления транспортным средством согласно первому варианту осуществления включает в себя блок 10 определения местоположения рассматриваемого транспортного средства, блок 20 обнаружения объектов и контроллер 30.
[0019]
Блок 20 обнаружения объектов включает в себя различные типы множества датчиков обнаружения объектов, установленных в рассматриваемом транспортном средстве для обнаружения объектов вокруг рассматриваемого транспортного средства, например, лазерный радар, радар миллиметрового диапазона, камеру и лидар (LiDAR: Light Detection and Ranging). Блок 20 обнаружения объектов обнаруживает объекты вокруг рассматриваемого транспортного средства 1 с помощью множества датчиков обнаружения объектов. Блок 20 обнаружения объектов обнаруживает движущиеся объекты, включая другие транспортные средства (с 2a по 2f), включая двухколесное транспортное средство, и статические объекты на проезжей части или вокруг проезжей части, такие как дорожная разметка, дорожный знак, бордюрный камень, отбойник, стена и припаркованное транспортное средство. Например, обнаруживаются местоположения, отношения, размеры, скорости, ускорения, замедления и скорость рыскания движущихся объектов или статических объектов (в некоторых случаях называемых «объектами» в целом) по отношению к рассматриваемому транспортному средству. Обратите внимание, что положения (углы рыскания), скорости, ускорения, замедления и скорости рыскания других транспортных средств (2a - 2f) в целом упоминаются как «поведение» других транспортных средств (2a - 2f). В заранее определенных повторяющихся циклах блок 20 обнаружения объектов непрерывно обнаруживает объекты на проезжей части и вокруг нее, по которой движется рассматриваемое транспортное средство 1.
[0020]
Блок 20 обнаружения объектов объединяет множество результатов обнаружения, полученных от каждого из множества датчиков обнаружения объекта, и выводит один результат обнаружения для каждого объекта. В частности, на основе местоположений и поведений других транспортных средств (2a - 2f), полученных от каждого из датчиков обнаружения объекта, вычисляются наиболее рациональные местоположения и поведение других транспортных средств (2a - 2f), которые получают наименьшее количество ошибок при учете характеристик погрешности и т.п. каждого датчика обнаружения объекта. В частности, с помощью уже известного способа объединения датчиков результаты обнаружения, полученные с помощью датчиков множества типов, всесторонне оцениваются, и, таким образом, получаются более точные результаты обнаружения.
[0021]
Блок 20 обнаружения объектов отслеживает обнаруженные другие транспортные средства (с 2a по 2f). В частности, на основе объединенных результатов обнаружения, местоположения и поведения других транспортных средств (2a - 2f), выведенных в разное время, используются для проверки (ассоциации) идентичностей других транспортных средств (2a - 2f) в разное время. Отметим, что поведение других транспортных средств (с 2a по 2f), выводимое в разные моменты времени, сохраняется в памяти (запоминающем устройстве) в контроллере 30 и используется для помощи при движении для рассматриваемого транспортного средства 1, описанной ниже.
[0022]
Блок 20 обнаружения объектов может получить дорожную структуру на основе статических объектов (например, дорожной разметки, дорожного знака, бордюра, отбойника и стены), за исключением останавливающегося транспортного средства. Например, как раскрыто в публикации японской патентной заявки №. 2001-199260, блок 20 обнаружения объектов может распознавать рассматриваемую полосу L1 движения и соседнюю полосу L2 движения, обнаруживая белую линию со ссылкой на данные изображения камеры. В качестве результатов обнаружения блок 20 обнаружения объектов, например, выводит данные, указывающие структуру дороги, и данные, указывающие местоположения и поведение других транспортных средств на диаграмме с видом сверху (фиг. 2), которая представляет собой вид с воздуха над рассматриваемым транспортным средством.
[0023]
Блок 10 определения местоположения рассматриваемого транспортного средства включает в себя датчик определения местоположения, который измеряет местоположение (абсолютное местоположение) и ориентацию (абсолютную ориентацию) рассматриваемого транспортного средства 1 в наземных координатах, например - приемное устройство, установленное в рассматриваемом транспортном средстве 1 для приема сигналов GPS (глобальной системы позиционирования). Кроме того, блок 10 определения местоположения рассматриваемого транспортного средства включает в себя схему арифметической обработки, которая выполняет одометрию и точный расчет. В частности, блок 10 определения местоположения рассматриваемого транспортного средства может измерять относительное местоположение, относительное положение и скорость рассматриваемого транспортного средства 1 относительно заранее определенной опорной точки, используя датчик скорости колес, который определяет скорость каждого колеса рассматриваемого транспортного средства 1, датчик угла поворота руля, который определяет угол поворота рулевого колеса, и схему арифметической обработки. Информация, указывающая абсолютное местоположение, абсолютную ориентацию, относительное местоположение и относительную ориентацию рассматриваемого транспортного средства 1, упоминается как «информация, указывающая местоположение и ориентацию рассматриваемого транспортного средства 1». Блок 10 определения местоположения рассматриваемого транспортного средства может получить местоположение и ориентацию рассматриваемого транспортного средства 1 на карте на основе информации, указывающей местоположение и ориентацию рассматриваемого транспортного средства. Карта обозначается данными карты, заранее сохраненными в памяти в контроллере 30.
[0024]
Обратите внимание, что данные карты могут не быть заранее сохранены в памяти в контроллере 30. Когда данные карты не сохранены, контроллер 30 может получать данные карты извне транспортного средства через обмен данными между транспортными средствами (vehicle-to-vehicle communication) или между транспортными средствами и инфраструктурой (vehicle-to-infrastructure communication) интеллектуальной транспортной системы (ITS) или универсальной системы управления дорожным движением (UTMS) или, например, через мобильную связь, такую как 3G и LTE.
[0025]
Как и в случае с данными карты, контроллер 30 может получать данные, указывающие структуру дороги вокруг рассматриваемого транспортного средства 1, и данные, указывающие местоположения и поведения других транспортных средств (с 2a по 2f) вокруг рассматриваемого транспортного средства 1 извне транспортного средства через связь между транспортными средствами или транспортными средствами с инфраструктурой или посредством мобильной связи, такой как 3G и LTE, вместо блока 20 обнаружения объектов.
[0026]
Контроллер 30 может содействовать въезду в поток движущихся машин рассматриваемого транспортного средства 1 в соседнюю полосу движения на основе данных, указывающих структуру дороги, а также местоположения и поведения других транспортных средств (с 2a по 2f), полученных блоком 20 обнаружения объектов или извне транспортное средство, и данные, указывающие текущее местоположение рассматриваемого транспортного средства 1, полученные блоком 10 определения местоположения рассматриваемого транспортного средства.
[0027]
Контроллер 30 представляет собой микрокомпьютер общего назначения, включающий в себя ЦП (центральный процессор: блок управления), память (хранилище), такую как RAM и ROM, и блок ввода и вывода. На микрокомпьютере установлена компьютерная программа (программа помощи при движении) для функционирования микрокомпьютера в качестве устройства помощи при движении. Микрокомпьютер функционирует как множество схем обработки информации (с 31 по 37), включенных в устройство помощи при движении, посредством выполнения компьютерной программы. Отметим, что здесь описан пример реализации множества схем обработки информации (31-37), включенных в устройство помощи при движении, с использованием программного обеспечения. Само собой разумеется, что также возможно сформировать схемы обработки информации (с 31 по 37), подготовив аппаратные средства, предназначенные для выполнения описанных ниже обработок информации. Кроме того, множество схем обработки информации (с 31 по 37) могут быть сформированы из отдельных аппаратных средств. Кроме того, схемы обработки информации (с 31 по 37) могут использоваться в качестве электронного блока управления (ЭБУ), используемого для других органов управления, относящихся к рассматриваемому транспортному средству. В этом варианте осуществления, в качестве примера, микрокомпьютер также реализует схемы (38, 39) обработки информации, которые выполняют автоматическое вождение рассматриваемого транспортного средства.
[0028]
Контроллер 30 включает в себя блок 30a выбора места назначения въезда в поток движущихся машин, блок 38 формирования маршрута рассматриваемого транспортного средства и блок 39 управления транспортным средством в качестве множества схем обработки информации (30a, 38, 39). Отметим, что устройство помощи при движении согласно первому варианту осуществления реализовано блоком 30a выбора места назначения въезда в поток движущихся машин.
[0029]
На основе истории въезда в поток движущихся машин и местоположений других транспортных средств (от 2c до 2e), движущихся по соседней полосе L2 движения в направлении полосы движения в пределах секции Pmer въезда в поток движущихся машин, блок 30a выбора места назначения въезда в поток движущихся машин выбирает транспортное средство назначения въезда в поток движущихся машин из множества других транспортных средств(c 2a по 2f), которое будет двигаться позади рассматриваемого транспортного средства 1, когда рассматриваемое транспортное средство 1 въезжает в поток движущихся машин в соседнюю полосу L2 движения. В частности, на основе «ожидания сбоя въезда в поток движущихся машин», которое представляет собой ожидание того, что рассматриваемое транспортное средство 1 не сможет въехать в поток движущихся машин в соседнюю полосу L2 движения, блок 30a выбора места назначения въезда в поток движущихся машин выбирает транспортное средство места назначения въезда в поток движущихся машин из множества других транспортных средств (с 2a по 2f), которое будет двигаться позади рассматриваемого транспортного средства 1, когда рассматриваемое транспортное средство 1 въезжает в поток движущихся машин в соседнюю полосу L2 движения. То есть транспортное средство назначения въезда в поток движущихся машин, которое, как ожидается, уступит дорогу рассматриваемому транспортному средству 1, выражающему намерение въехать в поток движущихся машин в соседнюю полосу L2 движения от рассматриваемой полосы L1 движения, выбирается из других транспортных средств (с 2a по 2f), движущихся в рассматриваемой полосе L1 движения или соседней полосе L2 движения. Транспортное средство назначения въезда в поток движущихся машин может быть транспортным средством, которое будет двигаться впереди рассматриваемого транспортного средства 1, когда рассматриваемое транспортное средство 1 въезжает в поток движущихся машин в соседнюю полосу L2 движения.
[0030]
Блок 30a выбора места назначения въезда в поток движущихся машин включает в себя блок 31 вычисления секции въезда в поток движущихся машин, блок 32 вычисления второго ожидания сбоя, блок 33 определения въезда в поток движущихся машин, блок 34 формирования истории въезда в поток движущихся машин, блок 35 вычисления первого ожидания сбоя, блок 36 объединения и блок 37 выбора транспортного средства назначения въезда в поток движущихся машин.
[0031]
На основе данных, указывающих структуру полосы движения, блок 31 вычисления секций въезда в поток движущихся машин вычисляет секцию Pmer въезда в поток движущихся машин, в пределах которой рассматриваемое транспортное средство 1 может въезжать в поток движущихся машин в соседнюю полосу L2 движения. Например, в примере, показанном на фиг. 2, идентифицируются местоположения начальной точки p1 и конечной точки p4 секции Pmer въезда в поток движущихся машин на карте. Блок 31 вычисления секции въезда в поток движущихся машин может не идентифицировать многие местоположения, пока блок 31 вычисления секции въезда в поток движущихся машин идентифицирует по меньшей мере местоположение конечной точки p4 секции Pmer въезда в поток движущихся машин на карте.
[0032]
Блок 32 вычисления второго ожидания сбоя вычисляет второе ожидание сбоя въезда в поток движущихся машин, которое представляет собой ожидание того, что рассматриваемое транспортное средство 1 не сможет въехать в поток движущихся машин в каждом местоположении в направлении полосы движения в пределах секции Pmer въезда в поток движущихся машин. Фиг. 2 иллюстрирует пример распределения вторых ожиданий сбоя въезда в поток движущихся машин, вычисленного блоком 32 вычисления второго ожидания сбоя. В пределах секции Pmer въезда в поток движущихся машин второе ожидание сбоя въезда в поток движущихся машин в конечной точке p4 является самым высоким, в то время как второе ожидание сбоя въезда в поток движущихся машин в начальной точке p1 является самым низким. В пределах секции Pmer въезда в поток движущихся машин второе ожидание сбоя въезда в поток движущихся машин выше по мере приближения к конечной точке p4. В примере, показанном на фиг. 2, второе ожидание сбоя въезда в поток движущихся машин пропорционально расстоянию до конечной точки p4. Второе ожидание сбоя въезда в поток движущихся машин пропорционально расстоянию от конечной точки p4. Излишне говорить, что распределение вторых ожиданий сбоя въезда в поток движущихся машин, показанное на фиг. 2, является примером. Например, также можно указать распределение вторых ожиданий сбоя въезда в поток движущихся машин с помощью функции квадратичного или большего значения расстояния от конечной точки p4.
[0033]
Когда рассматриваемое транспортное средство 1 движется по рассматриваемой полосе L1 движения рядом с конечной точкой p4 секции Pmer въезда в поток движущихся машин и въезжает в поток движущихся машин в соседнюю полосу L2 движения непосредственно перед конечной точкой p4, во многих случаях смена полосы движения может быть поспешной или агрессивной в большей степени, чем для случая въезда в поток движущихся машин около начальной точки p1. Кроме того, у водителей других транспортных средств, образующих линию транспортных средств, создается впечатление плохой манеры вождения от рассматриваемого транспортного средства 1, которое обгоняет другие транспортные средства (с 2c по 2e) на секции Pmer въезда в поток движущихся машин и пытается объединиться непосредственно перед конечной точкой p4. По этой причине, когда въезд в поток движущихся машин в соседнюю полосу L2 движения выполняется непосредственно перед конечной точкой p4, увеличивается риск нарушения потока всего трафика в секции Pmer въезда в поток движущихся машин. Следовательно, блок 32 вычисления второго ожидания сбоя вычисляет более высокое второе ожидание сбоя въезда в поток движущихся машин по мере приближения к конечной точке p4. То есть блок 32 вычисления второго ожидания сбоя предсказывает, что ожидание того, что въезд в поток движущихся машин не удастся, выше по мере приближения к конечной точке p4.
[0034]
Кроме того, блок 32 вычисления второго ожидания сбоя вычисляет вторые ожидания сбоя въезда в поток движущихся машин на основе структуры полосы движения и изменения поведения рассматриваемого транспортного средства 1. Например, более высокое второе ожидание сбоя въезда в поток движущихся машин вычисляется, поскольку ускорение или замедление рассматриваемого транспортного средства 1 выше. Таким образом, второе ожидание сбоя въезда в поток движущихся машин - это ожидание сбоя въезда в поток движущихся машин, определяемое на основе действий, касающихся въезда в поток движущихся машин в отношении рассматриваемого транспортного средства 1.
[0035]
На основании местоположений других транспортных средств (с 2a по 2f), движущихся по рассматриваемой полосе L1 движения или соседней полосе L2 движения в пределах секции Pmer въезда в поток движущихся машин, блок 33 определения въезда в поток движущихся машин определяет, въехали ли в поток движущихся машин другие транспортные средства (с 2a по 2f) в соседнюю полосу L2 движения. В частности, сначала блок 20 обнаружения объектов обнаруживает временное изменение местоположений других транспортных средств (с 2a по 2f), движущихся по рассматриваемой полосе L1 движения или соседней полосе L2 движения, до того, как рассматриваемое транспортное средство 1 достигнет начальной точки секции Pmer въезда в поток движущихся машин, например, за 100 м до начальной точки p1. Затем, на основе изменения местоположений в направлении ширины полосы движения других транспортных средств (с 2a по 2f) в пределах секции Pmer въезда в поток движущихся машин, блок 33 определения въезда в поток движущихся машин определяет, выполнили ли въезд в поток движущихся машин другие транспортные средства (с 2a по 2f). Например, когда центры в направлении ширины транспортного средства других транспортных средств (с 2a по 2f), движущихся по рассматриваемой полосе L1 движения, пересекают граничную линию полосы движения рассматриваемой полосы L1 движения и соседней полосы L2 движения, определяется, что другие транспортные средства (2a - 2f) въезжают в поток движущихся машин в соседнюю полосу L2 движения. В противном случае, если работает указатель поворота, может быть определено, что объединение выполняется, когда работа указателя поворота прекращается. Блок 33 определения въезда в поток движущихся машин определяет, был ли въезд в поток движущихся машин выполнен для всех других транспортных средств (с 2a по 2f), движущихся по рассматриваемой полосе L1 движения или соседней полосе L2 движения, обнаруженной блоком 20 обнаружения объектов.
[0036]
На основе результата определения въезда в поток движущихся машин блоком 33 определения въезда в поток движущихся машин, блок 34 формирования истории въезда в поток движущихся машин формирует историю въезда в поток движущихся машин, которая является историей, касающейся въезда в поток движущихся машин каждого из других транспортных средств (с 2a по 2f). Основываясь на действиях других транспортных средств (с 2a по 2f), касающихся объединения, блок 34 формирования истории въезда в поток движущихся машин формирует историю въезда в поток движущихся машин. Сформированная история въезда в поток движущихся машин временно сохраняется в памяти контроллера 30.
[0037]
В частности, блок 34 формирования истории въезда в поток движущихся машин формирует пару из первого другого транспортного средства и второго другого транспортного средства, которому уступило дорогу первое другое транспортное средство во время въезда в поток движущихся машин. То есть формируется пара другого транспортного средства, которое уступило дорогу, и другого транспортного средства, которому был предоставлен путь. Кроме того, блок 34 формирования истории въезда в поток движущихся машин подсчитывает, сколько раз уступало дорогу первое другое транспортное средство, уступившее дорогу второму другому транспортному средству во время въезда в поток движущихся машин, и сохраняет подсчитанное количество раз в памяти как часть истории въезда в поток движущихся машин. Обратите внимание, что «количество раз уступки дороги» указывает количество раз в пределах секции Pmer въезда в поток движущихся машин, и нет необходимости принимать во внимание количество раз в другой секции въезда в поток движущихся машин. Кроме того, блок 34 формирования истории въезда в поток движущихся машин может сохранять замедление для уступки дороги первому другому транспортному средству, которое уступило дорогу второму другому транспортному средству для въезда в поток движущихся машин, как часть истории въезда в поток движущихся машин. Кроме того, блок 34 формирования истории въезда в поток движущихся машин может сохранить тот факт, что другие транспортные средства отклонили запрос на въезд в поток движущихся машин, как историю въезда в поток движущихся машин. Например, блок 34 формирования истории въезда в поток движущихся машин определяет, что запрос на въезд в поток движущихся машин от другого транспортного средства, движущегося по рассматриваемой полосе L1 движения, отклонен транспортным средством, движущимся параллельно другому транспортному средству, когда выполняются условия (1) - (5).
(1) Другое транспортное средство движется параллельно конкретному другому транспортному средству, движущемуся по соседней полосе L2 движения (параллельно движущееся транспортное средство),
(2) У другого транспортного средства включен указатель поворота в направлении движущегося параллельно транспортного средства,
(3) Другое транспортное средство едет рядом с соседней полосой L2 движения,
(4) Состояние удовлетворения (1) - (3) продолжается в течение заранее определенного периода времени (например, от 10 до 30 секунд), и
(5) После (4) другое транспортное средство не въезжает в поток движущихся машин перед движущимся параллельно транспортным средством.
[0038]
На основе истории въезда в поток движущихся машин блок 35 вычисления первого ожидания сбоя вычисляет для каждого из других транспортных средств (с 2a по 2f) первое ожидание сбоя въезда в поток движущихся машин, которое является ожиданием того, что рассматриваемое транспортное средство 1 не сможет въехать в поток движущихся машин перед другим. транспортное средство (любое из 2a - 2f). Таким образом, первое ожидание сбоя въезда в поток движущихся машин - это ожидание сбоя въезда в поток движущихся машин, определенное на основании прошлых действий других транспортных средств (с 2a по 2f). Прошлые действия других транспортных средств (от 2a до 2f) - это действия, касающиеся въезда в поток движущихся машин других транспортных средств (от 2a до 2f) в пределах секции Pmer въезда в поток движущихся машин.
[0039]
В частности, как для первого, так и для второго других транспортных средств, составляющих пару, блок 35 вычисления первого ожидания сбоя вычисляет более высокое первое ожидание сбоя въезда в поток движущихся машин, чем у других транспортных средств, не составляющих пару. Например, как показано на фиг. 2, для области (p2 - p3), включающей первое другое транспортное средство 2c, уступившее дорогу, и второе другое транспортное средство 2d, которому был предоставлен путь, блок 35 вычисления первого ожидания сбоя вычисляет более высокое первое ожидание сбоя въезда в поток движущихся машин, чем у других областей. Кроме того, для первого другого транспортного средства вычисляется более высокое первое ожидание сбоя въезда в поток движущихся машин, если количество уступок дороги выше. Кроме того, для первого другого транспортного средства вычисляется более высокое первое ожидание сбоя въезда в поток движущихся машин, поскольку замедление для уступки дороги больше. Кроме того, для второго другого транспортного средства вычисляется более низкое первое ожидание сбоя въезда в поток движущихся машин, чем для первого другого транспортного средства, когда удовлетворяется заранее определенное условие допуска. «Заранее определенное условие допуска» заключается в том, что расстояние между транспортными средствами между вторым другим транспортным средством и вторым предшествующим транспортным средством, движущимся впереди второго другого транспортного средства, равно или превышает заранее определенное значение. Кроме того, для другого транспортного средства, которое отклонило запрос на въезд в поток движущихся машин, вычисляется первое ожидание сбоя въезда в поток движущихся машин выше, чем у первого другого транспортного средства, которое уступило дорогу второму другому транспортному средству во время въезда в поток движущихся машин.
[0040]
Блок 36 объединения вычисляет ожидание сбоя после объединения, которое представляет собой объединение первого ожидания сбоя въезда в поток движущихся машин и второго ожидания сбоя въезда в поток движущихся машин. Например, как проиллюстрировано на фиг. 2, можно вычислить ожидание сбоя после объединения путем суммирования первого ожидания сбоя въезда в поток движущихся машин и второго ожидания сбоя въезда в поток движущихся машин для каждого местоположения в направлении полосы движения в пределах секции Pmer въезда в поток движущихся машин. Затем на основе местоположений других транспортных средств (2a - 2f) ожидания сбоя после объединения распределяются между другими транспортными средствами (2a - 2f) соответственно. Таким образом, блок 36 объединения вычисляет ожидание сбоя после объединения для каждого из других транспортных средств (с 2a по 2f). Отметим, что перед объединением каждое из первого ожидания сбоя въезда в поток движущихся машин и второго ожидания сбоя въезда в поток движущихся машин может быть назначено соответствующим другим транспортным средствам (с 2a по 2f). Блок 36 объединения может взвесить как первое ожидание сбоя въезда в поток движущихся машин, так и второе ожидание сбоя въезда в поток движущихся машин и объединять взвешенные первое ожидание сбоя въезда в поток движущихся машин и второе ожидание сбоя въезда в поток движущихся машин для вычисления ожидания сбоя после объединения.
[0041]
На основе ожидания сбоя после объединения блок 37 выбора транспортного средства назначения въезда в поток движущихся машин выбирает транспортное средство места назначения въезда в поток движущихся машин из других транспортных средств (с 2a по 2f), которые будут двигаться позади рассматриваемого транспортного средства 1, когда рассматриваемое транспортное средство 1 въезжает в поток движущихся машин в соседнюю полосу L2 движения. Например, блок 37 выбора транспортного средства назначения въезда в поток движущихся машин может выбрать другое транспортное средство с наименьшим ожиданием сбоя после объединения из других транспортных средств (с 2a по 2f) в качестве транспортного средства назначения въезда в поток движущихся машин. В примере, показанном на фиг. 2, ожидание сбоя после объединения (объединенные затраты) является наименьшим около начальной точки p1 секции Pmer въезда в поток движущихся машин. Следовательно, наименьшее ожидание сбоя после объединения присваивается другому транспортному средству 2b рядом с начальной точкой p1. Таким образом, блок 37 выбора транспортного средства назначения въезда в поток движущихся машин выбирает другое транспортное средство 2b в качестве транспортного средства назначения въезда в поток движущихся машин.
[0042]
На основе данных, указывающих структуру дороги и поведение других транспортных средств (с 2a по 2f), а также информации о местоположении рассматриваемого транспортного средства 1, блок 38 формирования маршрута рассматриваемого транспортного средства формирует маршрут движения рассматриваемого транспортного средства 1 для въезда в поток движущихся машин в соседнюю полосу L2 движения перед выбранным транспортным средством 2b назначения въезда в поток движущихся машин. Маршрут движения для попытки въезда в поток движущихся машин в соседнюю полосу L2 движения вычисляется в местоположении, удаленном от другого транспортного средства 2c, движущегося впереди транспортного средства 2b назначения въезда в поток движущихся машин на заранее определенном расстоянии в направлении полосы движения. Маршрут движения включает не только временное изменение местоположения рассматриваемого транспортного средства, но также временное изменение скорости движения. Обратите внимание, что можно использовать любой способ формирования маршрута движения. Блок 38 формирования маршрута рассматриваемого транспортного средства может использовать уже известный способ для формирования маршрута движения рассматриваемого транспортного средства 1.
[0043]
Блок 39 управления транспортным средством приводит в действие по меньшей мере одно из рулевого привода, привода педали акселератора и привода педали тормоза на основе собственного местоположения, вычисленного блоком 10 определения местоположения рассматриваемого транспортного средства, так что рассматриваемое транспортное средство 1 движется в соответствии с маршрутом рассматриваемого транспортного средства, сформированного блоком 38 формирования маршрута рассматриваемого транспортного средства. Отметим, что, хотя в первом варианте осуществления описан случай выполнения управления согласно маршруту рассматриваемого транспортного средства, рассматриваемое транспортное средство 1 может управляться без формирования маршрута рассматриваемого транспортного средства. В этом случае также можно осуществлять управление на основе относительного расстояния с другими транспортными средствами (с 2a по 2f) или разницы углов ориентации между другими транспортными средствами (2a-2f) и рассматриваемым транспортным средством 1. Блок 39 управления транспортным средством многократно определяет, разрешает ли транспортное средство 2b назначения въезда в поток движущихся машин смену полосы движения рассматриваемому транспортному средству 1. Блок 39 управления транспортным средством определяет, что транспортное средство 2b назначения въезда в поток движущихся машин разрешает смену полосы движения рассматриваемым транспортным средством 1, когда расстояние между транспортными средствами между транспортным средством 2b назначения въезда в поток движущихся машин и другим транспортным средством 2c, движущимся впереди транспортного средства 2b назначения въезда в поток движущихся машин, равно или больше, чем значение, необходимое для безопасной смены полосы движения рассматриваемым транспортным средством 1.
[0044]
Операции устройства помощи при движении согласно первому варианту осуществления, то есть операции блока 30a выбора места назначения въезда в поток движущихся машин на фиг. 1, описаны со ссылкой на фиг. с 3 по 5. Во-первых, процедура вычисления первых ожиданий сбоя въезда в поток движущихся машин описывается со ссылкой на блок-схему на фиг. 3.
[0045]
Сначала на этапе S01 блок 30a выбора места назначения въезда в поток движущихся машин получает данные, указывающие структуру дороги, и данные, указывающие местоположения и поведение других транспортных средств. Блок 30a выбора места назначения въезда в поток движущихся машин может получать данные от блока 20 обнаружения объектов или вне транспортного средства через мобильную связь.
[0046]
Процесс переходит к этапу S02, и блок 10 определения местоположения рассматриваемого транспортного средства получает текущее местоположение рассматриваемого транспортного средства 1 от датчика определения местоположения, установленного в рассматриваемом транспортном средстве 1 или вне транспортного средства, посредством мобильной связи. Процесс переходит к этапу S03, и блок 33 определения въезда в поток движущихся машин определяет, въехали ли в поток движущихся машин другие транспортные средства (с 2a по 2f) в соседнюю полосу L2 движения, на основе местоположений других транспортных средств (с 2a по 2f), движущихся по рассматриваемой полосе L1 движения, или соседняя полоса L2 движения в пределах секции Pmer въезда в поток движущихся машин.
[0047]
Процесс переходит к этапу S04, и блок 34 формирования истории въезда в поток движущихся машин обновляет историю въезда в поток движущихся машин, которая является историей, касающейся въезда в поток движущихся машин каждого из других транспортных средств (с 2a по 2f), на основе результата определения въезда в поток движущихся машин посредством блока 33 определения въезда в поток движущихся машин. Обратите внимание, что история въезда в поток движущихся машин создается повторно, и новая история добавляется к старой. Следовательно, на этапе S04 блок 34 формирования истории въезда в поток движущихся машин может обновлять историю въезда в поток движущихся машин. То же самое относится к «обновлению» другой информации. То есть, когда один и тот же вид информации повторно получается в заранее определенные временные интервалы, и новая информация добавляется к старой информации, это называется «обновлением».
[0048]
Процесс переходит к этапу S05, и блок 34 формирования истории въезда в поток движущихся машин обновляет информацию (информацию о паре) о паре другого транспортного средства, уступившего дорогу, и другого транспортного средства, которому был предоставлен путь, на основе результата определения въезда в поток движущихся машин блоком 33 определения въезда в поток движущихся машин. Процесс переходит к этапу S06, и блок 35 вычисления первого ожидания сбоя обновляет первое ожидание сбоя въезда в поток движущихся машин для каждого из других транспортных средств (с 2a по 2f) на основе истории въезда в поток движущихся машин, включающей в себя обновленную информацию о паре. Таким образом, блок 35 вычисления первого ожидания сбоя обновляет первые ожидания сбоя въезда в поток движущихся машин на основе прошлых действий других транспортных средств (с 2a по 2f).
[0049]
На этапе S07 определяется, выполняются ли обработки этапов с S03 по S06 для всех других транспортных средств (с 2a по 2f). Блок 30a выбора места назначения въезда в поток движущихся машин многократно выполняет обработку этапов с S03 по S06 для всех других транспортных средств (с 2a по 2f). Когда обработка этапов с S03 по S06 для других транспортных средств (с 2a по 2f) завершается (ДА на этапе S07), блок-схема на фиг. 3 завершается.
[0050]
Далее со ссылкой на блок-схему на фиг. 4 описывается процедура вычисления вторых ожиданий сбоя въезда в поток движущихся машин. Сначала, на этапе S11, блок 10 определения местоположения рассматриваемого транспортного средства получает текущее местоположение рассматриваемого транспортного средства 1 от датчика определения местоположения, установленного в рассматриваемом транспортном средстве 1 или вне транспортного средства, посредством мобильной связи.
[0051]
Процесс переходит к этапу S12, и блок 31 вычисления секций въезда в поток движущихся машин считывает данные карты вокруг рассматриваемого транспортного средства 1 из данных карты, заранее сохраненных в памяти в контроллере 30. Отметим, что блок 31 вычисления секции въезда в поток движущихся машин может получать информацию, указывающую собственное местоположение, и данные карты извне транспортного средства через связь между транспортным средством, связь между транспортным средством и инфраструктурой, а также через мобильную связь.
[0052]
Процесс переходит к этапу S13, и блок 31 вычисления секции въезда в поток движущихся машин вычисляет секцию Pmer въезда в поток движущихся машин, в которой рассматриваемое транспортное средство 1 может въезжать в поток движущихся машин в соседнюю полосу L2 движения, на основе информации, указывающей собственное местоположение, и данных карты. В частности, блок 31 вычисления секции въезда в поток движущихся машин получает данные, указывающие структуру полосы движения вокруг рассматриваемого транспортного средства 1, на основе информации, указывающей собственное местоположение, и данных карты, и идентифицирует секцию Pmer въезда в поток движущихся машин на основе данных, указывающих структуру полосы движения.
[0053]
Процесс переходит к этапу S14, и блок 32 вычисления второго ожидания сбоя обновляет второе ожидание сбоя въезда в поток движущихся машин для каждого местоположения в направлении полосы движения в пределах секции Pmer въезда в поток движущихся машин, где второе ожидание сбоя въезда в поток движущихся машин представляет собой ожидание того, что рассматриваемое транспортное средство 1 не сможет въехать в поток движущихся машин в соответствующем местоположении. После выполнения этапа S14 блок-схема на фиг. 4 завершается.
[0054]
Далее со ссылкой на блок-схему на фиг. 5 описывается процедура объединения первых ожиданий сбоя въезда в поток движущихся машин и вторых ожиданий сбоя въезда в поток движущихся машин и идентификации транспортного средства назначения въезда в поток движущихся машин. Сначала, на этапе S21, блок 36 объединения считывает первые ожидания сбоя въезда в поток движущихся машин для других транспортных средств (с 2a по 2f), обновленные посредством блок-схемы на фиг. 3. Процесс переходит к этапу S22, и блок 36 объединения считывает вторые ожидания сбоя въезда в поток движущихся машин для других транспортных средств (с 2a по 2f), обновленную посредством блок-схемы на фиг. 4.
[0055]
Процесс переходит к этапу S23, и блок 36 объединения распределяет вторые ожидания сбоя въезда в поток движущихся машин другим транспортным средствам (с 2a по 2f). Поскольку вторые ожидания сбоя въезда в поток движущихся машин определяются для соответствующих местоположений в направлении полосы движения в пределах секции Pmer въезда в поток движущихся машин, блок 36 объединения назначает вторые ожидания сбоя въезда в поток движущихся машин в местоположениях других транспортных средств (с 2a по 2f) транспортным средствам (с 2a по 2f).
[0056]
Процесс переходит к этапу S24, и блок 36 объединения взвешивает как первые ожидания сбоя въезда в поток движущихся машин, так и вторые ожидания сбоя въезда в поток движущихся машин. Процесс переходит к этапу S25, и блок 36 объединения объединяет взвешенные первые ожидания сбоя въезда в поток движущихся машин и вторые ожидания сбоя въезда в поток движущихся машин и вычисляет ожидания сбоя после объединения. Процесс переходит к этапу S26, и блок 36 объединения распределяет ожидания сбоя после объединения в местоположениях других транспортных средств (с 2a по 2f) транспортным средствам (с 2a по 2f).
[0057]
На этапе S27 определяется, выполняются ли обработки этапов с S21 по S26 для всех других транспортных средств (с 2a по 2f). Блок 36 объединения многократно выполняет обработку этапов с S21 по S26 для всех других транспортных средств (с 2a по 2f). Когда все обработки этапов с S21 по S26 завершены для других транспортных средств (с 2a по 2f) (ДА на этапе S27), процесс переходит к этапу S28.
[0058]
На этапе S28, на основе ожиданий сбоя после объединения, блок 37 выбора транспортного средства назначения въезда в поток движущихся машин выбирает транспортное средство назначения въезда в поток движущихся машин из других транспортных средств (с 2a по 2f), которые будут двигаться позади рассматриваемого транспортного средства 1, когда рассматриваемое транспортное средство 1 въезжает в поток движущихся машин в соседнюю полосу L2 движения. То есть транспортное средство назначения въезда в поток движущихся машин является транспортным средством, перед которым рассматриваемое транспортное средство 1 выражает намерение въехать в поток движущихся машин. Например, блок 37 выбора транспортного средства назначения въезда в поток движущихся машин может выбрать другое транспортное средство с наименьшим ожиданием сбоя после объединения в качестве транспортного средства назначения въезда в поток движущихся машин.
[0059]
Как описано выше, можно получить следующие операции и эффекты согласно первому варианту осуществления.
[0060]
Блок 30a выбора места назначения въезда в поток движущихся машин формирует историю въезда в поток движущихся машин каждого из других транспортных средств (с 2a по 2f) на основе местоположений других транспортных средств (от 2a до 2f) и выбирает транспортное средство назначения въезда в поток движущихся машин на основе истории въезда в поток движущихся машин каждого из других транспортных средств (с 2a по 2f) и местоположений других транспортных средств (с 2a по 2f), движущихся по соседней полосе L2 движения в направлении полосы движения в пределах секции Pmer въезда в поток движущихся машин. Следовательно, можно выбрать транспортное средство назначения въезда в поток движущихся машин как с точки зрения других транспортных средств (с 2a по 2f), так и с точки зрения рассматриваемого транспортного средства 1. Таким образом, поскольку можно правильно выбрать другое транспортное средство, которое обеспечивает легкий въезд в поток движущихся машин, блок 30a выбора места назначения въезда в поток движущихся машин может содействовать правильному въезду в поток движущихся машин рассматриваемого транспортного средства 1 в соседнюю полосу L2 движения.
[0061]
Отметим, что на основе истории въезда в поток движущихся машин каждого из других транспортных средств (с 2a по 2f) блок 30a выбора места назначения въезда в поток движущихся машин вычисляет первое ожидание сбоя въезда в поток движущихся машин. То есть, на основе прошлых действий, касающихся въезда в поток движущихся машин других транспортных средств (с 2a по 2f), вычисляется первое ожидание сбоя въезда в поток движущихся машин, которое является ожиданием того, что рассматриваемое транспортное средство 1 не сможет въехать в поток движущихся машин перед другими транспортными средствами (с 2a по 2f). ). С другой стороны, на основе местоположения каждого из других транспортных средств (с 2a по 2f) в направлении полосы движения в пределах секции Pmer въезда в поток движущихся машин, блок 30a выбора места назначения въезда в поток движущихся машин вычисляет для каждого из других транспортных средств (с 2a по 2f), второе ожидание сбоя въезда в поток движущихся машин, которое является ожиданием того, что рассматриваемое транспортное средство не сможет въехать в поток движущихся машин перед другим транспортным средством или позади него. То есть второе ожидание сбоя въезда в поток движущихся машин - это ожидание сбоя въезда в поток движущихся машин, основанное на будущих действиях, касающихся въезда в поток движущихся машин рассматриваемого транспортного средства 1. На основе ожидания сбоя после объединения, которое представляет собой объединение двух ожиданий сбоя въезда в поток движущихся машин, блок 30a выбора места назначения въезда в поток движущихся машин выбирает транспортное средство назначения въезда в поток движущихся машин.
[0062]
По мере того, как местоположение въезда в поток движущихся машин рассматриваемого транспортного средства 1 приближается к конечной точке p4 секции Pmer въезда в поток движущихся машин, другие транспортные средства (2a - 2f), движущиеся по соседней полосе L2 движения, считают въезд в поток движущихся машин "несправедливым", и, следовательно, вероятность То, что другие транспортные средства (2a - 2f) не уступают дорогу, увеличивается. Для предотвращения такой ситуации формируется более высокое второе ожидание сбоя въезда в поток движущихся машин по мере приближения к конечной точке p4, и, таким образом, можно выбрать надлежащее транспортное средство назначения въезда в поток движущихся машин.
[0063]
На основе действий, касающихся въезда в поток движущихся машин среди других транспортных средств (с 2a по 2f), блок 30a выбора места назначения въезда в поток движущихся машин формирует историю въезда в поток движущихся машин. Можно создать правильную историю въезда в поток движущихся машин на основе действий других транспортных средств (от 2a до 2f), таких как уступка дороги или переход.
[0064]
Блок 30a выбора места назначения въезда в поток движущихся машин формирует пару из первого другого транспортного средства 2c и второго другого транспортного средства 2d, которому путь был предоставлен первым другим транспортным средством 2c во время въезда в поток движущихся машин, в качестве истории въезда в поток движущихся машин. Можно отдельно сохранить действия, касающиеся въезда в поток движущихся машин среди других транспортных средств.
[0065]
Блок 30a выбора места назначения въезда в поток движущихся машин подсчитывает количество уступок дороги посредством первого другого транспортного средства 2c, которое уступало дорогу второму другому транспортному средству 2d во время въезда в поток движущихся машин, в качестве истории въезда в поток движущихся машин. Существует базовая психология людей (водителей), которую больше не хотят уступать дорогу, поскольку количество уступок дороги увеличивается. По этой причине в историю въезда в поток движущихся машин можно добавить психологию водителей как упомянутое количество раз. Таким образом, можно отразить психологию водителей на первое ожидание сбоя въезда в поток движущихся машин.
[0066]
Блок 30a выбора места назначения въезда в поток движущихся машин сохраняет замедление для уступки дороги первому другому транспортному средству 2c, которое уступило дорогу во время въезда в поток движущихся машин, в качестве истории въезда в поток движущихся машин. Поскольку замедление было больше, вероятность того, что смена полосы движения была неожиданной для первого другого транспортного средства 2c, которое уступило дорогу, выше, а вероятность снова уступить дорогу ниже. Соответственно, можно сформировать надлежащую историю въезда в поток движущихся машин с замедлением для уступки дороги, сохраняемым в качестве истории въезда в поток движущихся машин. Таким образом, можно отразить замедление для уступки дороги на первое ожидание сбоя въезда в поток движущихся машин.
[0067]
Блок 30a выбора места назначения въезда в поток движущихся машин сохраняет тот факт, что другие транспортные средства (с 2a по 2f) отклонили запрос на въезд в поток движущихся машин, как историю въезда в поток движущихся машин. Другое транспортное средство, отклонившее запрос на въезд в поток движущихся машин, - это транспортное средство, которое вряд ли уступит дорогу. Таким образом, можно отразить историю прошлого отклонения запроса на въезд в поток движущихся машин до первого ожидания сбоя въезда в поток движущихся машин.
[0068]
Блок 30a выбора места назначения въезда в поток движущихся машин вычисляет ожидание сбоя после объединения для каждого из других транспортных средств (с 2a по 2f). Можно вычислить все ожидания сбоя после объединения для всех других транспортных средств (2a - 2f).
[0069]
Блок 30a выбора места назначения въезда в поток движущихся машин взвешивает как первые ожидания сбоя въезда в поток движущихся машин, так и вторые ожидания сбоя въезда в поток движущихся машин и объединяет взвешенные первые ожидания сбоя въезда в поток движущихся машин и вторые ожидания сбоя въезда в поток движущихся машин для вычисления ожиданий сбоя после объединения. Поскольку можно взвесить каждое из первых ожиданий сбоя въезда в поток движущихся машин и вторых ожиданий сбоя въезда в поток движущихся машин с произвольными весами при объединении ожиданий сбоя въезда в поток движущихся машин, можно скорректировать веса для действий рассматриваемого транспортного средства 1 и действий других транспортных средств (2a - 2f).
[0070]
Как для первого, так и для второго других транспортных средств (2c, 2d), составляющих пару, блок 30a выбора места назначения въезда в поток движущихся машин вычисляет более высокое первое ожидание сбоя въезда в поток движущихся машин, чем для других транспортных средств, не составляющих пару. Первое и второе другие транспортные средства (2c, 2d) уже испытали событие въезда в поток движущихся машин, и, таким образом, вероятность разрешения дополнительного въезда в поток движущихся машин мала. По этой причине можно сделать так, что первое и второе другие транспортные средства (2c, 2d) вряд ли будут выбраны в качестве транспортного средства назначения въезда в поток движущихся машин, назначив высокое ожидание сбоя первому и второму другим транспортным средствам (2c, 2d).
[0071]
Для первого другого транспортного средства 2c блок 30a выбора места назначения въезда в поток движущихся машин вычисляет более высокое первое ожидание сбоя въезда в поток движущихся машин, если количество уступок дороги выше. Можно отразить основную психологию людей, согласно которой водитель больше не хочет уступать дорогу по мере увеличения числа раз, когда он уступает дорогу, на первое ожидание сбоя въезда в поток движущихся машин.
[0072]
Для первого другого транспортного средства 2c блок 30a выбора места назначения въезда в поток движущихся машин вычисляет более высокое первое ожидание сбоя въезда в поток движущихся машин, поскольку замедление для уступки дороги больше. Поскольку замедление для уступки дороги было больше, вероятность того, что смена полосы движения была неожиданной для первого другого транспортного средства 2c, которое уступило дорогу, выше, а вероятность снова уступить дорогу ниже. Следовательно, можно правильно отразить замедление для уступки дороги на первое ожидание сбоя въезда в поток движущихся машин.
[0073]
Для второго другого транспортного средства 2d блок 30a выбора места назначения въезда в поток движущихся машин вычисляет более низкое первое ожидание сбоя въезда в поток движущихся машин, чем у первого другого транспортного средства 2c, когда удовлетворяется заранее определенное условие допуска. Для транспортного средства, которому был предоставлен путь, ожидание сбоя въезда в поток движущихся машин вычисляется ниже, чем для транспортного средства, которое уступило дорогу. Как правило, транспортное средство, которому был предоставлен путь, имеет более высокую вероятность уступить дорогу другим транспортным средствам. Эту возможность можно отразить на первом ожидании сбоя въезда в поток движущихся машин.
[0074]
Заранее определенное условие допуска состоит в том, что расстояние между транспортными средствами между вторым другим транспортным средством 2d и вторым предшествующим транспортным средством 2e, движущимся впереди второго другого транспортного средства 2d, равно или превышает заранее определенное значение. Когда транспортное средство, которому был предоставлен путь, имеет пространство перед собой, транспортное средство имеет высокую вероятность уступить дорогу. Следовательно, можно сделать правильное определение возможности уступить дорогу другим транспортным средствам, используя расстояние.
[0075]
Для другого транспортного средства, которое отклонило запрос на въезд в поток движущихся машин, блок 30a выбора места назначения въезда в поток движущихся машин вычисляет более высокое первое ожидание сбоя въезда в поток движущихся машин, чем у первого другого транспортного средства 2c, которое уступило дорогу второму другому транспортному средству 2d во время въезда в поток движущихся машин. Можно назначить надлежащее первое ожидание сбоя въезда в поток движущихся машин другому транспортному средству, которое отклонило запрос на въезд в поток движущихся машин, то есть транспортному средству, которое вряд ли уступит дорогу.
[0076]
Основываясь на структуре полосы движения и изменениях поведения рассматриваемого транспортного средства 1, блок 30a выбора места назначения въезда в поток движущихся машин вычисляет вторые ожидания сбоя въезда в поток движущихся машин. Можно правильно вычислить вторые ожидания сбоя въезда в поток движущихся машин на основе действий рассматриваемого транспортного средства 1.
[0077]
Блок 30a выбора места назначения въезда в поток движущихся машин вычисляет более высокое второе ожидание сбоя въезда в поток движущихся машин, когда ускорение или замедление рассматриваемого транспортного средства 1 больше. Водитель рассматриваемого транспортного средства 1 желает избежать въезда в поток движущихся машин, который вызывает сильное ускорение или замедление рассматриваемого транспортного средства 1, насколько это возможно. Блок 30a выбора места назначения въезда в поток движущихся машин может вычислить высокое второе ожидание сбоя въезда в поток движущихся машин для местоположения, в котором ускорение или замедление рассматриваемого транспортного средства 1 велико. Можно сделать так, чтобы другое транспортное средство в местоположении, в котором ускорение или замедление рассматриваемого транспортного средства 1 велико во время въезда в поток движущихся машин, вряд ли было выбрано в качестве транспортного средства назначения въезда в поток движущихся машин.
[0078]
Блок 30a выбора места назначения въезда в поток движущихся машин выбирает другое транспортное средство с наименьшим ожиданием сбоя после объединения в качестве транспортного средства назначения въезда в поток движущихся машин. Ожидания сбоя после объединения формируются из первых ожиданий сбоя въезда в поток движущихся машин, сформированных на основе истории въезда в поток движущихся машин других транспортных средств (с 2a по 2f), и вторых ожиданий сбоя въезда в поток движущихся машин, сформированных на основе въезда в поток движущихся машин рассматриваемого транспортного средства 1. Следовательно, можно представить надлежащий пункт назначения въезда в поток движущихся машин с точки зрения истории действий других транспортных средств (с 2a по 2f) и действий рассматриваемого транспортного средства 1.
[0079]
Второй вариант осуществления
Общая конфигурация устройства управления транспортным средством, включающего в себя устройство помощи при движении согласно второму варианту осуществления, описана со ссылкой на фиг. 6. Устройство помощи при движении согласно второму варианту осуществления для случая, когда рассматриваемая полоса L1 движения, по которой движется рассматриваемое транспортное средство 1, сливается с соседней полосой L2 движения, смежной с рассматриваемой полосой L1 движения, перед рассматриваемым транспортным средством 1, содействует въезду в поток движущихся машин рассматриваемого транспортного средства 1 в соседнюю полосу L2 движения. Устройство управления транспортным средством согласно второму варианту осуществления включает в себя блок 10 определения местоположения рассматриваемого транспортного средства, блок 20 обнаружения объектов и контроллер 30. Отметим, что, поскольку блок 10 определения местоположения рассматриваемого транспортного средства и блок 20 обнаружения объектов такие же, как и в первом варианте осуществления, дублированные описания здесь опускаются.
[0080]
Контроллер 30 согласно второму варианту осуществления включает в себя блок 30a выбора места назначения въезда в поток движущихся машин, блок 30b определения допуска на въезд в поток движущихся машин, блок 38 формирования маршрута рассматриваемого транспортного средства и блок 39 управления транспортным средством в качестве множества схем обработки информации (30a, 30b, 38, 39). Отметим, что контроллер 30 согласно второму варианту осуществления отличается от контроллера 30 согласно первому варианту осуществления, проиллюстрированному на фиг. 1, тем, что контроллер 30 согласно второму варианту осуществления дополнительно включает в себя блок 30b определения допуска на въезд в поток движущихся машин . Поскольку другие компоненты, блок 30a выбора места назначения въезда в поток движущихся машин, блок 38 формирования маршрута рассматриваемого транспортного средства и блок 39 управления транспортным средством, такие же, как у контроллера 30 согласно первому варианту осуществления, дублированные описания здесь опускаются.
[0081]
Блок 30b определения допуска на въезд в поток движущихся машин описывается отдельно. Блок 30b определения допуска на въезд в поток движущихся машин определяет, разрешает ли транспортное средство назначения въезда в поток движущихся машин, выбранное блоком 30a выбора места назначения въезда в поток движущихся машин, въезд в поток движущихся машин рассматриваемого транспортного средства 1.
[0082]
Блок 30b определения допуска на въезд в поток движущихся машин эффективно функционирует в сцене движения, как, например, проиллюстрировано на фиг. 7A. Другое транспортное средство 2d, движущееся впереди рассматриваемого транспортного средства 1 по рассматриваемой полосе L1 движения, пытается въехать в поток движущихся машин позади другого транспортного средства 2e. Затем другое транспортное средство 2c, движущееся позади другого транспортного средства 2e по соседней полосе L2 движения, позволяет въехать в поток движущихся машин другому транспортному средству 2d впереди другого транспортного средства 2c. То есть другое транспортное средство 2c уступает дорогу другому транспортному средству 2d, пытающемуся въехать в поток движущихся машин.
[0083]
Блок 30a выбора места назначения въезда в поток движущихся машин выбирает другое транспортное средство 2c в качестве транспортного средства назначения въезда в поток движущихся машин. В ответ блок 30b определения допуска на въезд в поток движущихся машин определяет, разрешает ли другое транспортное средство 2c въезд в поток движущихся машин рассматриваемого транспортного средства 1. Блок 30b определения допуска на въезд в поток движущихся машин идентифицирует транспортное средство - цель следования как цель, за которой следует другое транспортное средство 2c, и определяет, разрешает ли транспортное средство 2c назначения въезда в поток движущихся машин въезд в поток движущихся машин рассматриваемого транспортного средства 1, на основе количества изменений (разницы) в степени следования за транспортным средством - целью следования посредством транспортного средства 2c назначения въезда в поток движущихся машин.
[0084]
В сцене движения, проиллюстрированной на фиг. 7A, блок 30b определения допуска на въезд в поток движущихся машин идентифицирует другое транспортное средство 2d как транспортное средство - цель следования. Следовательно, блок 30b определения допуска на въезд в поток движущихся машин может точно выполнять определение ниже на основе величины изменений (разницы) в степени следования за транспортным средством 2d целью следования транспортным средством 2c назначения въезда в поток движущихся машин. То есть блок 30b определения допуска на въезд в поток движущихся машин может точно определить, разрешает ли другое транспортное средство 2c только въезд в поток движущихся машин другого транспортного средства 2d или разрешает не только въезд в поток движущихся машин другого транспортного средства 2d, но также въезд в поток движущихся машин рассматриваемого транспортного средства 1. Обратите внимание, что сцена движения, показанная на фиг. 7A, является примером сцены движения, в которой способ помощи при движении и устройство помощи при движении согласно второму варианту осуществления функционируют эффективно, а объем применения способа помощи при движении и устройство помощи при движении согласно второму варианту осуществления не ограничивается сценой движения.
[0085]
В дальнейшем операции блока 30b определения допуска на въезд в поток движущихся машин описаны конкретно со ссылкой на фиг. 6. Блок 30b определения допуска на въезд в поток движущихся машин включает в себя блок 41 выбора кандидата следования, блок 42 прогнозирования поведения других транспортных средств, блок 43 идентификации транспортного средства-цели следования, блок 44 вычисления степени следования и блок 45 оценки намерения.
[0086]
На основе временного изменения местоположений и поведений других транспортных средств (с 2a по 2f), отслеживаемых блоком 20 обнаружения объектов, блок 42 прогнозирования поведения других транспортных средств предсказывает будущие местоположения и поведение других транспортных средств (с 2a по 2f). В противном случае, как раскрыто в публикации японской патентной заявки №. 2001-199260, направления движения других транспортных средств (с 2a по 2f) могут быть спрогнозированы на основе скоростей транспортного средства, углов руля направления рулевого колеса, скорости рыскания и коэффициентов сцепления с дорогой других транспортных средств (с 2a по 2f). Кроме того, блок 42 прогнозирования поведения других транспортных средств может прогнозировать смену полосы движения других транспортных средств (с 2a по 2f) на основе будущих местоположений и поведений других транспортных средств (с 2a по 2f).
[0087]
Блок 41 выбора кандидатов следования обнаруживает другие транспортные средства, движущиеся впереди транспортного средства 2c назначения въезда в поток движущихся машин, из других транспортных средств, движущихся либо по одной из рассматриваемой полосы L1 движения, соседней полосы L2 движения и полосы движения, смежной с соседней полосой L2 движения. В сцене движения, показанной на фиг. 2 и 7A, полоса движения, смежная с соседней полосой L2 движения, является только рассматриваемая полоса L1 движения. Однако во втором варианте осуществления, когда есть полоса движения, смежная с соседней полосой L2 движения на противоположной стороне рассматриваемой полосы L1 движения, полоса движения, смежная с соседней полосой L2 движения на противоположной стороне рассматриваемой полосы L1 движения, также учитывается. То есть в сцене движения, показанной на фиг. 2 и 7A, предполагается, что есть дополнительная полоса движения в направлении движения, смежная с соседней полосой L2 движения с левой стороны. Блок 41 выбора кандидатов следования обнаруживает другие транспортные средства, движущиеся впереди транспортного средства 2c назначения въезда в поток движущихся машин, среди других транспортных средств, движущихся либо по соседней полосе L2 движения, либо по полосе движения, смежной с соседней полосой L2 движения. Например, в сцене движения согласно фиг. 2 блок 41 выбора кандидатов следования обнаруживает три других транспортных средства (2d, 2e, 2f) как другие транспортные средства, движущиеся впереди транспортного средства 2c назначения въезда в поток движущихся машин.
[0088]
Затем блок 41 выбора кандидатов следования выбирает другие транспортные средства (в дальнейшем именуемые «транспортные средства-кандидаты следования»), которые могут быть кандидатами в цель, за которыми следует транспортное средство назначения въезда в поток движущихся машин, из других транспортных средств, движущихся перед транспортным средством 2c назначения въезда в поток движущихся машин. Например, на основе местоположений и поведений других транспортных средств, отслеживаемых блоком 20 обнаружения объектов, блок 41 выбора кандидатов следования выбирает другое транспортное средство 2e, движущееся впереди транспортного средства 2c назначения въезда в поток движущихся машин по соседней полосе L2 движения, как транспортное средство-кандидат следования. На основе смены полосы движения другим транспортным средством 2d, предсказанной блоком 42 прогнозирования поведения других транспортных средств, другое транспортное средство 2d, пытающееся въехать в поток движущихся машин в соседнюю полосу L2 движения из рассматриваемой полосы L1 движения, выбирается в качестве транспортного средства-кандидата следования. То есть блок 41 выбора кандидатов следования выбирает по меньшей мере одно из другого транспортного средства 2e, движущегося впереди транспортного средства 2c назначения въезда в поток движущихся машин, и другого транспортного средства 2d, пытающегося въехать в поток движущихся машин между транспортным средством 2c назначения въезда в поток движущихся машин и другим транспортным средством 2e следующим образом в качестве транспортного средства-кандидата следования. Таким образом, на основе структуры полосы движения и состояний движения других транспортных средств блок 41 выбора кандидатов следования выбирает транспортное средство-кандидат следования. В этом случае «состояния движения других транспортных средств» - это по меньшей мере одно из местоположений и поведений других транспортных средств, отслеживаемых блоком 20 обнаружения объектов, а также будущие местоположения и поведения других транспортных средств, спрогнозированные блоком 20 обнаружения объектов .
[0089]
Блок 43 идентификации транспортного средства-цели следования идентифицирует транспортное средство - цель следования как цель, за которой следует транспортное средство назначения въезда в поток движущихся машин из транспортных средств-кандидатов следования. В частности, на основе разности скоростей между транспортными средствами-кандидатами следования и транспортным средством назначения въезда в поток движущихся машин блок 43 идентификации транспортного средства-цели следования идентифицирует транспортное средство - цель следования. Например, транспортное средство-кандидат следования с наименьшей разностью скоростей, идентифицируется как транспортное средство - цель следования. В противном случае блок 43 идентификации транспортного средства-цели следования может получить временное изменение разности скоростей и идентифицировать транспортное средство - цель следования на основании временного изменения разности скоростей (профиля разности скоростей). Когда текущая разность скоростей велика, но есть временное изменение уменьшения разности скоростей, будущая разность скоростей может иметь приоритет над текущей разностью скоростей для идентификации транспортного средства-цели следования.
[0090]
Кроме того, когда имеется множество транспортных средств-кандидатов следования, разность в скорости которых с транспортным средством 2c назначения въезда в поток движущихся машин равна или меньше заранее определенного значения, блок 43 идентификации транспортного средства-цели следования идентифицирует транспортное средство-кандидат следования с кратчайшим расстоянием от транспортного средства назначения въезда в поток движущихся машин в направлении полосы движения из этих транспортных средств-кандидатов следования в качестве транспортного средства-цели следования. Как описано выше, блок 30b определения допуска на въезд в поток движущихся машин идентифицирует одно транспортное средство - цель следования как цель, за которой следует транспортное средство назначения въезда в поток движущихся машин, из других транспортных средств, обнаруженных блоком 20 обнаружения объектов.
[0091]
Блок 44 вычисления степени следования вычисляет начальную степень следования. «Начальная степень следования» - это степень следования за транспортным средством - целью следования транспортным средством назначения въезда в поток движущихся машин, когда удовлетворяется заранее определенное начальное условие. «Степень следования» вычисляется, например, на основе расстояния между транспортными средствами или временного интервала между транспортным средством - целью следования и транспортным средством назначения въезда в поток движущихся машин. В частности, высокая степень следования получается по мере того, как расстояние между транспортными средствами или временной интервал короче, и поскольку временное изменение расстояния между транспортными средствами или временного интервала меньше. Временной интервал получается путем преобразования расстояния между транспортными средствами во время. В противном случае «степень следования» может быть расстоянием между транспортными средствами или самим временным интервалом.
[0092]
«Заранее определенное начальное условие» состоит в том, что другое транспортное средство 2d (первое предшествующее транспортное средство), движущееся впереди рассматриваемого транспортного средства 1, начинает въезжать в поток движущихся машин в соседнюю полосу L2 движения или что рассматриваемое транспортное средство 1 начинает выражать намерение въехать в поток движущихся машин в соседнюю полосу L2 движения. «Другое транспортное средство 2d начинает въезжать в поток движущихся машин в соседнюю полосу L2 движения» может быть определено блоком 33 определения въезда в поток движущихся машин или может быть предсказано блоком 42 прогнозирования поведения других транспортных средств. «Рассматриваемое транспортное средство 1 начинает выражать намерение въехать в поток движущихся машин в соседнюю полосу L2 движения" предназначен, например, для запуска указателя поворота на соседнюю полосу L2 движения.
[0093]
Когда другое транспортное средство 2d (первое предшествующее транспортное средство) начинает въезжать в поток движущихся машин в соседнюю полосу L2 движения, а также рассматриваемое транспортное средство 1 начинает выражать намерение въехать в поток движущихся машин в соседнюю полосу L2 движения в течение заранее определенного времени, блок 44 вычисления степени следования вычисляет начальную степень следования, когда другое транспортное средство 2d (первое предшествующее транспортное средство) начинает въезжать в поток движущихся машин в соседнюю полосу L2 движения.
[0094]
Обычно во многих случаях рассматриваемое транспортное средство 1 начинает выражать намерение въехать в поток движущихся машин в соседнюю полосу L2 движения в течение заранее определенного времени после того, как другое транспортное средство 2d (первое предшествующее транспортное средство) начинает въезжать в поток движущихся машин в соседнюю полосу L2 движения. Когда смена полосы движения другим транспортным средством 2d и выражение намерения рассматриваемым транспортным средством 1 происходят в течение заранее определенного времени, блок 44 вычисления степени следования определяет, что заранее определенное начальное условие удовлетворяется, когда другое транспортное средство 2d (первое предшествующее транспортное средство) начинает въезжать в поток движущихся машин в соседнюю полосу L2 движения и вычисляет начальную степень следования. С другой стороны, когда перед рассматриваемым транспортным средством 1 нет другого транспортного средства 2d (первого предшествующего транспортного средства), блок 44 вычисления степени следования определяет, что заранее определенное начальное условие удовлетворяется, когда рассматриваемое транспортное средство 1 начинает выражать намерение въезжать в поток движущихся машин в соседнюю полосу L2 движения и вычисляет начальную степень следования.
[0095]
Блок 44 вычисления степени следования вычисляет текущую степень следования, которая является степенью следования по истечении заранее определенного времени из вычисления начальной степени следования. Заранее определенное время может быть установлено произвольно, и в этом варианте осуществления после вычисления начальной степени следования текущая степень следования обновляется путем повторения вычисления в постоянный период времени.
[0096]
Блок 45 оценки намерения вычисляет разницу между начальной степенью следования и текущей степенью следования. В частности, разница вычисляется путем вычитания текущей степени следования из начальной степени следования или путем вычитания начальной степени следования из текущей степени следования. Например, когда «степень следования» представляет собой расстояние между транспортными средствами или сам временной интервал, блок 45 оценки намерения повторно вычисляет разницу между расстоянием между транспортными средствами или временным интервалом, когда заранее определенное начальное условие удовлетворяется, и текущее расстояние между транспортными средствами или текущий временной интервал за постоянный период времени.
[0097]
На основе этой разницы блок 45 оценки намерения определяет, разрешает ли транспортное средство 2c назначения въезда в поток движущихся машин рассматриваемого транспортного средства. В частности, блок 45 оценки намерения сравнивает начальную степень следования и текущую степень следования друг с другом, чтобы определить, добавлено ли расстояние между транспортными средствами или временной интервал, необходимый для въезда в поток движущихся машин рассматриваемого транспортного средства 1, между транспортным средством - целью следования и транспортным средством 2c назначения въезда в поток движущихся машин. На основе результата определения блок 45 оценки намерения определяет, разрешает ли транспортное средство 2c назначения въезда в поток движущихся машин въезда в поток движущихся машин рассматриваемого транспортного средства 1. Когда результат определения положительный, можно определить, что транспортное средство 2c назначения въезда в поток движущихся машин допускает въезда в поток движущихся машин рассматриваемого транспортного средства 1. С другой стороны, когда результат определения отрицательный, можно определить, что транспортное средство 2c назначения въезда в поток движущихся машин не позволяет въезд в поток движущихся машин рассматриваемого транспортного средства 1.
[0098]
Фиг. 7B представляет собой график, показывающий временные изменения скоростей v, расстояний между транспортными средствами (Dce, Dcd) и временных интервалов (Tce, Tcd) другого транспортного средства 2e, другого транспортного средства 2d (первого предшествующего транспортного средства-цели следования транспортное средство), и другое транспортное средство 2c (транспортное средство назначения въезда в поток движущихся машин) в сцене движения, проиллюстрированной на фиг. 7A. Отметим, что расстояние Dce между транспортными средствами указывает расстояние между транспортными средствами между другим транспортным средством 2c и другим транспортным средством 2e, а расстояние Dcd между транспортными средствами указывает расстояние между транспортными средствами между другим транспортным средством 2c и другим транспортным средством 2d. Временной интервал Tce указывает временной интервал между другим транспортным средством 2c и другим транспортным средством 2e, а временной интервал Tcd указывает временной интервал между другим транспортным средством 2c и другим транспортным средством 2d.
[0099]
До момента времени t1 другое транспортное средство 2e и другое транспортное средство 2c движутся по одной и той же соседней полосе L2 движения с почти одинаковыми скоростями, и расстояние Dce между транспортными средствами и временной интервал Tce также по существу постоянны. В момент времени t1 другое транспортное средство 2d начинает въезд в поток движущихся машин между другим транспортным средством 2e и другим транспортным средством 2c на соседней полосе L2 движения, и, таким образом, другое транспортное средство 2c начинает замедляться, а расстояние Dce между транспортными средствами и временной интервал Tce также начинают увеличиваться.
[0100]
На основе временных изменений местоположений и поведений других транспортных средств (2c, 2d, 2e) блок 43 идентификации транспортного средства-цели следования идентифицирует другое транспортное средство 2d как транспортное средство - цель следования. В момент времени t1, поскольку другое транспортное средство 2d (первое предшествующее транспортное средство) начинает въезжать в поток движущихся машин в соседнюю полосу L2 движения, блок 44 вычисления степени следования определяет, что заранее определенное начальное условие удовлетворяется. Блок 44 вычисления степени следования вычисляет начальную степень следования за другим транспортным средством 2d другим транспортным средством 2c, то есть, в частности, расстояние Dcd между транспортными средствами и временной интервал Tcd в момент времени t1.
[0101]
После вычисления начальной степени следования блок 44 вычисления степени следования повторяет вычисление с постоянным периодом времени и вычисляет текущую степень следования (расстояние Dcd между транспортными средствами и временной интервал Tcd). Сразу после момента времени t1, поскольку скорость движения другого транспортного средства 2c выше, чем скорость движения другого транспортного средства 2d, расстояние Dcd между транспортными средствами и временной интервал Tcd малы; однако в момент времени t2 скорость движения другого транспортного средства 2c становится медленнее, чем скорость движения другого транспортного средства 2d, а расстояние Dcd между транспортными средствами и временной интервал Tcd между другим транспортным средством 2c и другим транспортным средством 2d тоже начинает становиться больше.
[0102]
Блок 45 оценки намерения определяет, сопоставимы ли увеличенные величины (MD, MT) расстояния Dcd между транспортными средствами и временного интервала Tcd после момента времени t2 с расстоянием между транспортными средствами или временным интервалом, который требуется рассматриваемому транспортному средству 1 для въезда в поток движущихся машин. Когда они сопоставимы, можно определить, что другое транспортное средство 2c преодолевает расстояние между транспортными средствами или временной интервал для въезда в поток движущихся машин рассматриваемого транспортного средства 1. Другими словами, можно определить, что другое транспортное средство 2c регулирует не только скорость движения, чтобы следовать только за транспортным средством - целью следования (другое транспортное средство 2d), но также регулирует скорость движения, чтобы следовать за рассматриваемым транспортным средством 1. Таким образом, в этом случае блок 45 оценки намерения определяет, что другое транспортное средство 2c допускает въезд в поток движущихся машин рассматриваемого транспортного средства 1. С другой стороны, когда состояние, в котором скорость движения другого транспортного средства 2c почти такая же, как скорость движения другого транспортного средства 2d, продолжается после момента времени t2, увеличенные величины (MD, MT) почти равны нулю, и, таким образом, можно определить, что другое транспортное средство 2c допускает въезд в поток движущихся машин другого транспортного средства 2d, но не въезд в поток движущихся машин рассматриваемого транспортного средства 1.
[0103]
Операции блока 30b определения допуска на въезд в поток движущихся машин на фиг. 6 из операций устройства помощи при движении согласно второму варианту осуществления описаны со ссылкой на блок-схему последовательности операций на фиг. 8. Отметим, что операции блока 30a выбора места назначения въезда в поток движущихся машин такие же, как и в первом варианте осуществления, и дублированные описания здесь опускаются.
[0104]
Сначала, на этапе S31, блок 41 выбора кандидатов следования обнаруживает другое транспортное средство, движущееся впереди транспортного средства 2c назначения въезда в поток движущихся машин, из других транспортных средств, движущихся либо по рассматриваемой полосе L1 движения, соседней полосе L2 движения и полосе движения, смежной с соседней полосой L2 движения. «Впереди транспортного средства 2c назначения въезда в поток движущихся машин» означает, что местоположение в направлении полосы движения находится впереди транспортного средства 2c назначения въезда в поток движущихся машин. Затем на основе местоположений и поведений других транспортных средств и смены полосы движения другим транспортным средством 2d блок 41 выбора кандидатов следования выбирает транспортные средства-кандидаты следования (2d, 2e), которые могут быть кандидатами в цель, за которыми следует транспортное средство 2c назначения въезда в поток движущихся машин.
[0105]
Процесс переходит к этапу S32, и блок 43 идентификации транспортного средства-цели следования идентифицирует транспортное средство 2d цель следования как цель, за которой следует транспортное средство 2c назначения въезда в поток движущихся машин из транспортных средств-кандидатов следования (2d, 2e). В частности, блок 41 выбора кандидатов следования идентифицирует транспортное средство-кандидат следования (2d, 2e) с наименьшей текущей или будущей разностью скоростей между транспортными средствами-кандидатами следования (2d, 2e) и транспортным средством 2c назначения въезда в поток движущихся машин в качестве транспортного средства 2d цели следования.
[0106]
Процесс переходит к этапу S33, и блок 44 вычисления степени следования отслеживает ситуацию, в которой удовлетворяется заранее определенное начальное условие. Когда другое транспортное средство 2d, движущееся впереди рассматриваемого транспортного средства 1, начинает въезжать в поток движущихся машин в соседнюю полосу L2 движения или рассматриваемое транспортное средство 1 начинает выражать намерение въехать в поток движущихся машин в соседнюю полосу L2 движения, определяется, что заранее определенное начальное условие удовлетворяется (ДА в S33), и процесс переходит к этапу S34.
[0107]
На этапе S34 блок 44 вычисления степени следования вычисляет начальную степень следования за транспортным средством 2d целью следования посредством транспортного средства 2c назначения въезда в поток движущихся машин (расстояние между транспортными средствами или временной интервал), когда удовлетворяется заранее определенное начальное условие. Процесс переходит к этапу S35, и блок 44 вычисления степени следования вычисляет текущую степень следования по истечении заранее определенного времени, прошедшего после вычисления начальной степени следования.
[0108]
Процесс переходит к этапу S36, и блок 45 оценки намерения вычисляет разницу между начальной степенью следования на этапе S34 и текущей степенью следования на этапе S35. Определяется равна ли разность, или больше, чем заранее определенное опорное значение. В этом случае, «заранее определенное опорное значение» является расстояние между транспортными средствами или временной интервал, требуемый для въезда в поток движущихся машин рассматриваемого транспортного средства 1. Если разность равна или больше, чем заранее определенное опорное значение (ДА на S36), то процесс переходит к этапу S37, и блок 45 оценки намерения определяет, что транспортное средство 2c назначения въезда в поток движущихся машин позволяет въезд в поток движущихся машин рассматриваемого транспортного средства 1.
[0109]
С другой стороны, когда разность меньше заранее определенного опорного значения (НЕТ на S36), то процесс переходит к этапу S38, блок 30b определения допуска на въезд в поток движущихся машин определяет, возможно ли обнаружение транспортного средства 2c назначения въезда в поток движущихся машин. Когда обнаружение транспортного средства 2c назначения въезда в поток движущихся машин возможно (ДА на S38), процесс возвращается к этапу S35, и снова вычисляется текущая степень следования. Таким образом, если разность меньше, чем заранее определенное опорное значение, а также обнаружение транспортного средства 2c назначения въезда в поток движущихся машин возможно, блок 44 вычисления степени следования повторяет вычисления на заранее определенный период времени, чтобы вычислить текущую степень следования. Как только обнаружение транспортного средства 2c назначения въезда в поток движущихся машин становится невозможным (НЕТ на S38), субъект для определения, разрешить ли въезд в поток движущихся машин рассматриваемого транспортного средства 1, не может быть обнаружен, и, таким образом, обработка прерывается. Когда определено, что транспортное средство 2c назначения въезда в поток движущихся машин допускает въезд в поток движущихся машин рассматриваемого транспортного средства 1, блок 38 формирования маршрута рассматриваемого транспортного средства формирует маршрут движения для рассматриваемого транспортного средства 1 для въезда в поток движущихся машин перед транспортным средством 2c назначения въезда в поток движущихся машин.
[0110]
Как описано выше, можно получить следующие операции и эффекты согласно второму варианту осуществления.
[0111]
Блок 30b определения допуска на въезд в поток движущихся машин идентифицирует транспортное средство 2d цель следования как цель, за которой следует транспортное средство 2c назначения въезда в поток движущихся машин, из других транспортных средств, движущихся либо по рассматриваемой полосе L1 движения, соседней полосе L2 движения и другой полосе движения, смежной с соседней полосой L2 движения, и определяет, разрешает ли транспортное средство 2c назначения въезда в поток движущихся машин въезд в поток движущихся машин рассматриваемого транспортного средства 1, на основе временного изменения (разницы) в степени следования за транспортным средством 2d целью следования транспортным средством 2c назначения въезда в поток движущихся машин. Следовательно, можно правильно определить, разрешен ли въезд в поток движущихся машин другого транспортного средства 2d или разрешен ли въезд в поток движущихся машин рассматриваемого транспортного средства 1.
[0112]
На основе структуры полосы движения и состояний движения других транспортных средств блок 41 выбора кандидатов следования выбирает транспортные средства-кандидаты следования. В ситуации, когда транспортные средства замедляются при движении по полосам движения, можно правильно выбрать транспортные средства-кандидаты следования.
[0113]
«Состояния движения других транспортных средств» - это местоположения и поведения других транспортных средств, отслеживаемых блоком 20 обнаружения объектов. При этом, например, транспортные средства, припаркованные на обочине той же полосы движения, не выбираются в качестве транспортных средств-кандидатов следования, и можно правильно выбрать транспортные средства, движущиеся впереди транспортного средства 2c назначения въезда в поток движущихся машин.
[0114]
«Состояния движения других транспортных средств» - это по меньшей мере одно из будущих местоположений или поведений других транспортных средств, предсказанных на основе местоположений и поведений других транспортных средств. Благодаря этому можно выбрать другие транспортные средства, которые не движутся по той же полосе движения, что и транспортное средство 2c назначения въезда в поток движущихся машин в текущий момент времени, но, как ожидается, будут двигаться по той же полосе движения, что и транспортное средство 2c назначения въезда в поток движущихся машин, в ближайшее время через несколько секунд, в качестве транспортных средств-кандидатов следования.
[0115]
На основе состояния движения транспортного средства 2c назначения въезда в поток движущихся машин и состояний движения других транспортных средств, движущихся впереди транспортного средства 2c назначения въезда в поток движущихся машин в направлении полосы движения, блок 43 идентификации транспортного средства-цели следования идентифицирует транспортное средство - цель следования. Следовательно, можно правильно идентифицировать транспортное средство - цель следования из транспортных средств-кандидатов следования.
[0116]
Блок 43 идентификации транспортного средства-цели следования идентифицирует другое транспортное средство с наименьшей разностью скоростей относительно транспортного средства 2c назначения въезда в поток движущихся машин из транспортных средств-кандидатов следования в качестве транспортного средства-цели следования. Обычно водитель транспортного средства 2c назначения въезда в поток движущихся машин приводит в движение транспортное средство 2c назначения въезда в поток движущихся машин, так что разность скоростей транспортного средства относительно транспортного средства-цели следования становится близкой к нулю, чтобы избежать столкновения с транспортным средством - целью следования. Следовательно, можно правильно идентифицировать транспортное средство - цель следования.
[0117]
Блок 43 идентификации транспортного средства-цели следования идентифицирует транспортное средство - цель следования на основании временного изменения разности скоростей между транспортными средствами-кандидатами следования и транспортным средством 2c назначения въезда в поток движущихся машин. Принимая во внимание временное изменение разности скоростей (профиль скорости), можно идентифицировать транспортное средство-кандидат следования, которое имеет разность скоростей транспортных средств, которая возникает в текущий момент времени, но в ближайшем будущем будет близка к нулю через несколько секунд, в качестве транспортного средства-цели следования. Когда не только рассматриваемое транспортное средство 1, но также другое транспортное средство 2d пытается въехать в поток движущихся машин перед транспортным средством 2c назначения въезда в поток движущихся машин, можно правильно идентифицировать следующую цель транспортного средства 2c назначения въезда в поток движущихся машин.
[0118]
Когда имеется несколько транспортных средств-кандидатов следования, разность скоростей которых относительно транспортного средства 2c назначения въезда в поток движущихся машин равна или меньше заранее определенного значения, блок 43 идентификации транспортного средства-цели следования идентифицирует транспортное средство-кандидат следования на кратчайшее расстояние от транспортного средства 2c назначения въезда в поток движущихся машин в направлении полосы движения от транспортных средств-кандидатов следования в качестве транспортного средства-цели следования. Обычно водитель транспортного средства 2c назначения въезда в поток движущихся машин, вероятно, обратит внимание на ближайшее другое транспортное средство на маршруте движения транспортного средства 2c назначения въезда в поток движущихся машин. Таким образом, можно правильно идентифицировать следующую цель транспортного средства 2c назначения въезда в поток движущихся машин, даже когда имеется несколько транспортных средств-кандидатов следования.
[0119]
Заранее определенное начальное условие состоит в том, что другое транспортное средство 2d (первое предшествующее транспортное средство), движущееся впереди рассматриваемого транспортного средства 1, начинает въезжать в поток движущихся машин в соседнюю полосу L2 движения, или что рассматриваемое транспортное средство 1 начинает выражать намерение въехать в поток движущихся машин в соседнюю полосу L2 движения. Блок 44 вычисления степени следования может начать вычисление степени следования, используя внешний ввод в качестве триггера. В этом случае внешний ввод является началом въезда в поток движущихся машин другого транспортного средства 2d (первого предшествующего транспортного средства) с соседней полосой движения или выражением намерения смены полосы движения рассматриваемым транспортным средством 1 (указатель направления). С точки зрения транспортного средства 2c назначения въезда в поток движущихся машин, внешний ввод является триггером для изменения ситуаций. Можно правильно определить, разрешает ли транспортное средство 2c назначения въезда в поток движущихся машин въезд в поток движущихся машин рассматриваемого транспортного средства 1, сравнивая начальную степень следования, когда заранее определенное начальное условие удовлетворяется, и степень следования в текущий момент времени друг с другом.
[0120]
Когда другое транспортное средство 2d (первое предшествующее транспортное средство) начинает въезжать в поток движущихся машин в соседнюю полосу L2 движения, а также рассматриваемое транспортное средство 1 начинает выражать намерение въехать в поток движущихся машин в соседнюю полосу L2 движения в течение заранее определенного времени, блок 44 вычисления степени следования вычисляет начальную степень следования, когда другое транспортное средство 2d (первое предшествующее транспортное средство) начинает въезжать в поток движущихся машин в соседнюю полосу L2 движения. Когда и смена полосы движения другим транспортным средством 2d перед транспортным средством 2c назначения въезда в поток движущихся машин, и выражение намерения смены полосы движения рассматриваемым транспортным средством 1 предоставляются в качестве внешнего ввода, можно вычислить начальную степень следования при смене полосы движения другим транспортным средством 2d перед транспортным средством 2c назначения въезда в поток движущихся машин, установленную в качестве начальной точки. С точки зрения транспортного средства 2c назначения въезда в поток движущихся машин, вероятно, будет установлен высокий приоритет на въезд в поток движущихся машин другого транспортного средства 2d перед транспортным средством 2c назначения въезда в поток движущихся машин, чтобы гарантировать безопасность. Принимая во внимание эту тенденцию, можно в нужный момент вычислить начальную степень следования.
[0121]
Степень следования за транспортным средством - целью следования посредством транспортного средства 2c назначения въезда в поток движущихся машин вычисляется на основе местоположения и состояния движения транспортного средства-цели следования, а также местоположения и состояния движения транспортного средства 2c назначения въезда в поток движущихся машин. Можно правильно вычислить степень следования за транспортным средством - целью следования посредством транспортного средства 2c назначения въезда в поток движущихся машин, принимая во внимание местоположение и состояние движения каждого транспортного средства.
[0122]
Степень следования за транспортным средством - целью следования транспортным средством 2c назначения въезда в поток движущихся машин вычисляется на основании, по меньшей мере, расстояния между транспортными средствами или временного интервала между транспортным средством - целью следования и транспортным средством 2c назначения въезда в поток движущихся машин. Можно правильно вычислить степень следования за транспортным средством - целью следования посредством транспортного средства 2c назначения въезда в поток движущихся машин, принимая во внимание расстояние между транспортными средствами или временной интервал между транспортным средством - целью следования и транспортным средством 2c назначения въезда в поток движущихся машин. С точки зрения транспортного средства 2c назначения въезда в поток движущихся машин, транспортное средство 2c назначения въезда в поток движущихся машин управляется для поддержания либо расстояния между транспортными средствами, либо временного интервала. Таким образом, можно правильно определить, разрешен ли въезд в поток движущихся машин рассматриваемого транспортного средства 1, вычисляя степень следования, используя либо расстояние между транспортными средствами, либо временной интервал.
[0123]
Блок 45 оценки намерения сравнивает начальную степень следования и текущую степень следования друг с другом, чтобы определить, добавлено ли расстояние между транспортными средствами или временной интервал, необходимый для въезда в поток движущихся машин рассматриваемого транспортного средства 1 между транспортным средством - целью следования и транспортное средство 2c назначения въезда в поток движущихся машин. На основе результата определения блок 45 оценки намерения определяет, разрешает ли транспортное средство 2c назначения въезда в поток движущихся машин въезд в поток движущихся машин рассматриваемого транспортного средства 1. Увеличенные величины расстояния Dcd между транспортными средствами и временного интервала Tcd от момента времени (t1), когда начальное условие удовлетворяется, получают на основе временного изменения степени следования. Когда увеличенные величины сопоставимы с расстоянием между транспортными средствами или временным интервалом для въезда в поток движущихся машин рассматриваемого транспортного средства 1, можно определить, что другое транспортное средство 2c допускает въезд в поток движущихся машин рассматриваемого транспортного средства 1. Таким образом, можно сделать правильное определение въезда в поток движущихся машин рассматриваемого транспортного средства 1, принимая во внимание временное изменение степени следования.
[0124]
Отметим, что вышеописанные варианты осуществления являются примерами настоящего изобретения. Следовательно, нет необходимости говорить, что настоящее изобретение не ограничено описанными выше вариантами осуществления, и даже для режима, отличного от вариантов осуществления, различные изменения могут быть внесены в зависимости от конструкции без отклонения от технической идеи согласно настоящему изобретению.
СПИСОК ПОЗИЦИОННЫХ ОБОЗНАЧЕНИЙ
[0125]
1 рассматриваемое транспортное средство
2a - 2f другое транспортное средство
2c транспортное средства назначения въезда в поток движущихся машин, второе другое транспортное средство
2d первое другое транспортное средство, следующее за транспортное средство - цель следования
Dce, Dcd расстояние между транспортными средствами
Tce, Tcd временной интервал
L1 рассматриваемая полоса движения
L2 соседняя полоса движения
Pmer секция въезда в поток движущихся машин.

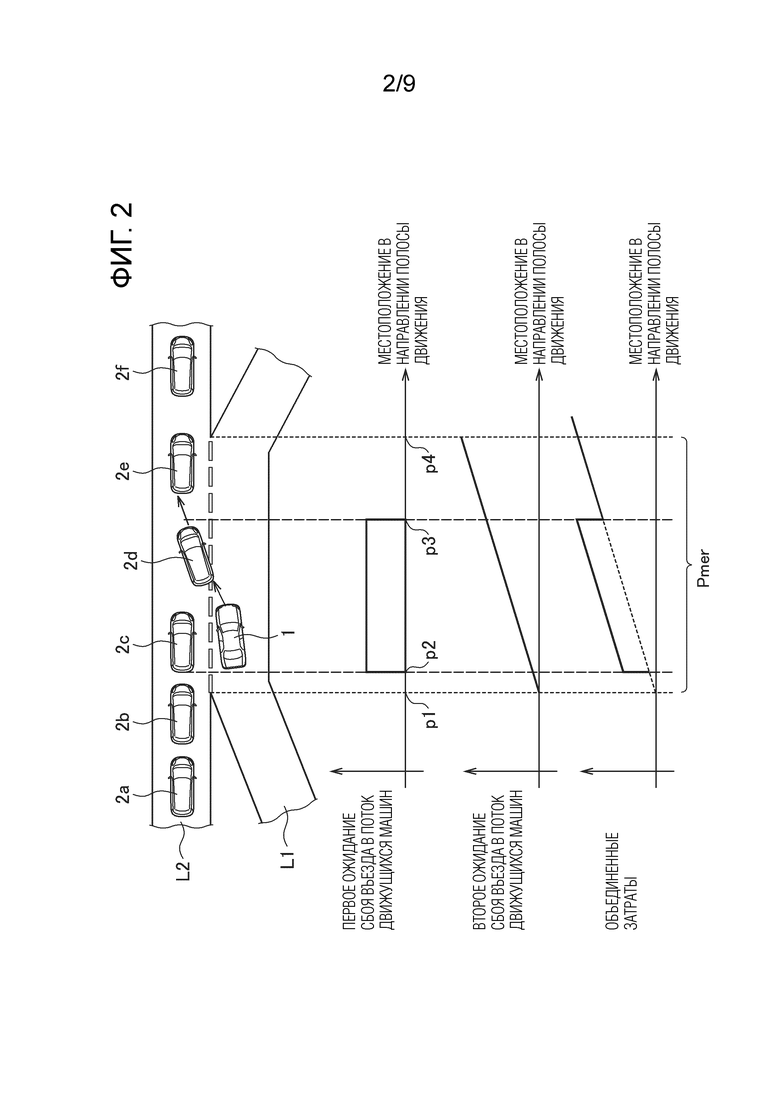
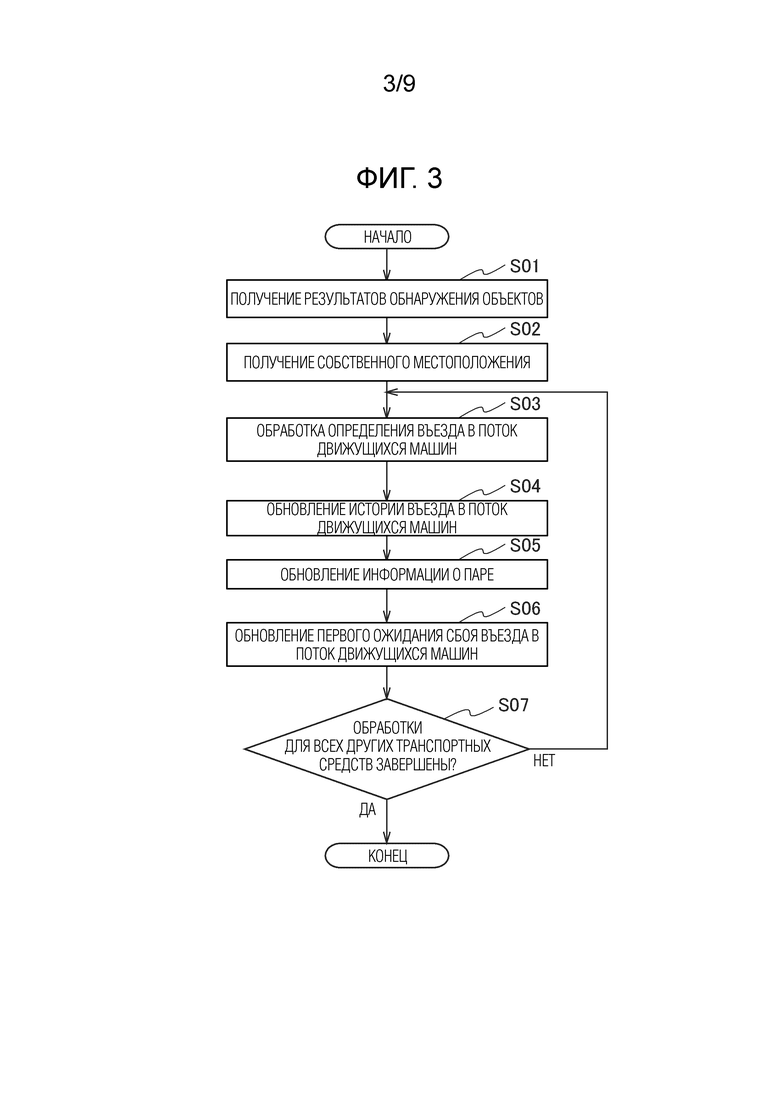
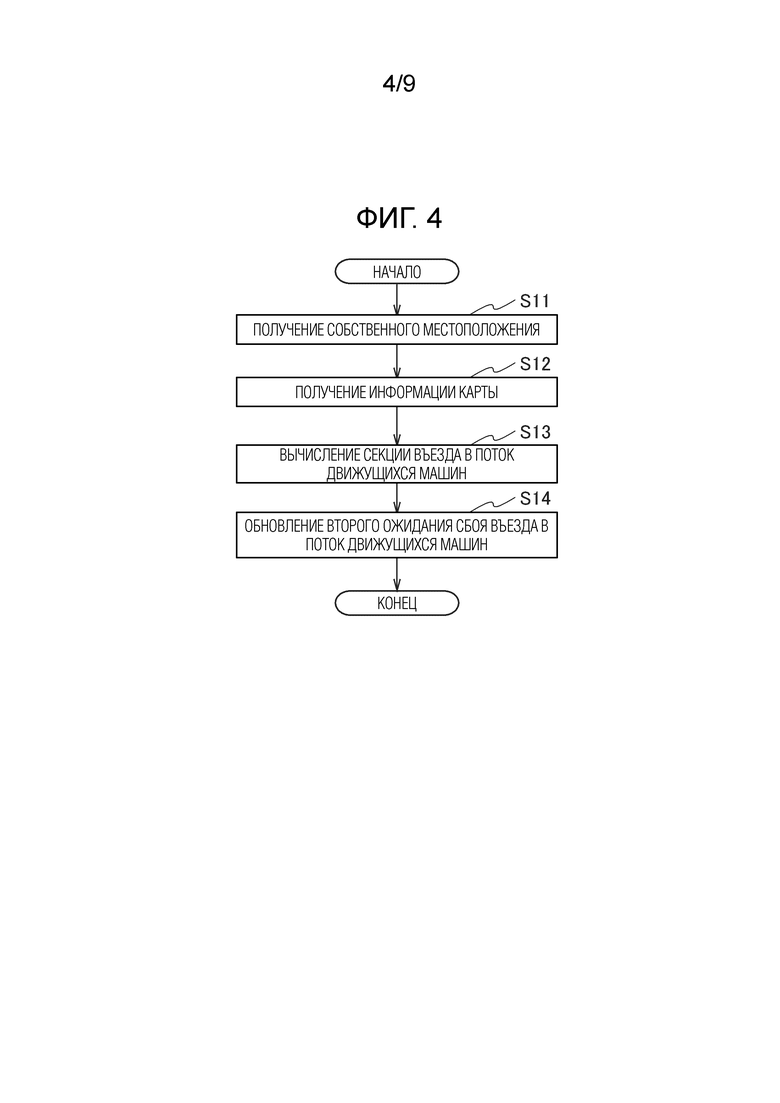
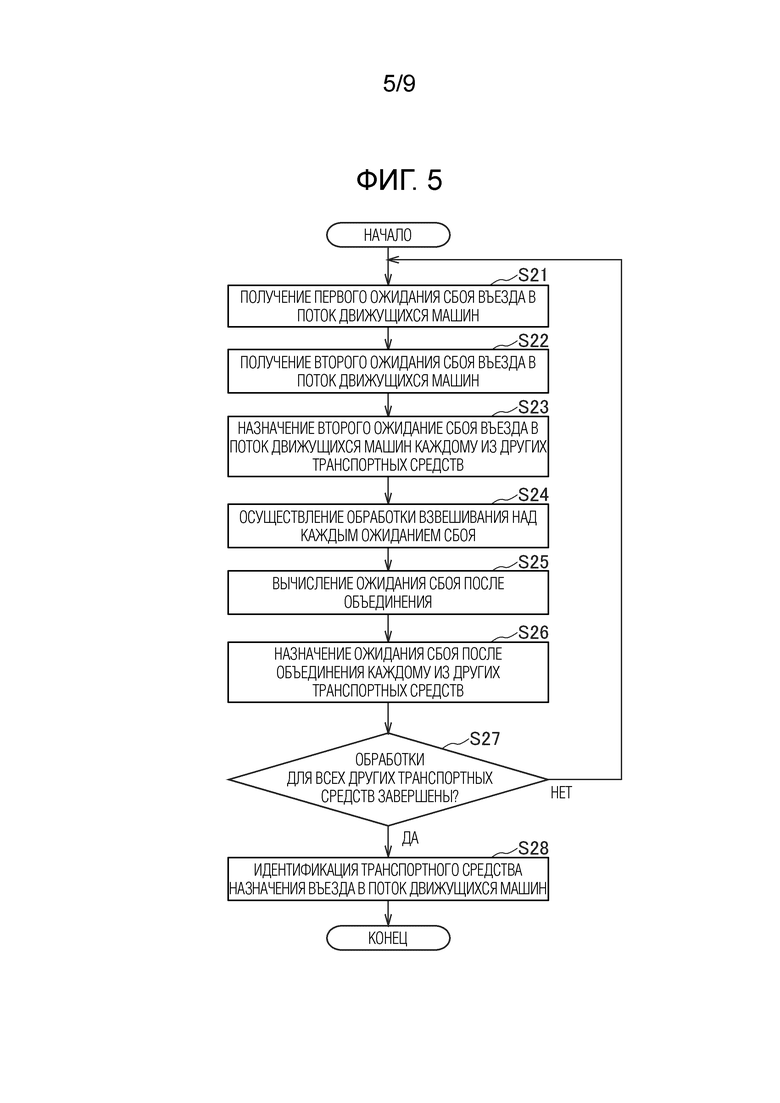
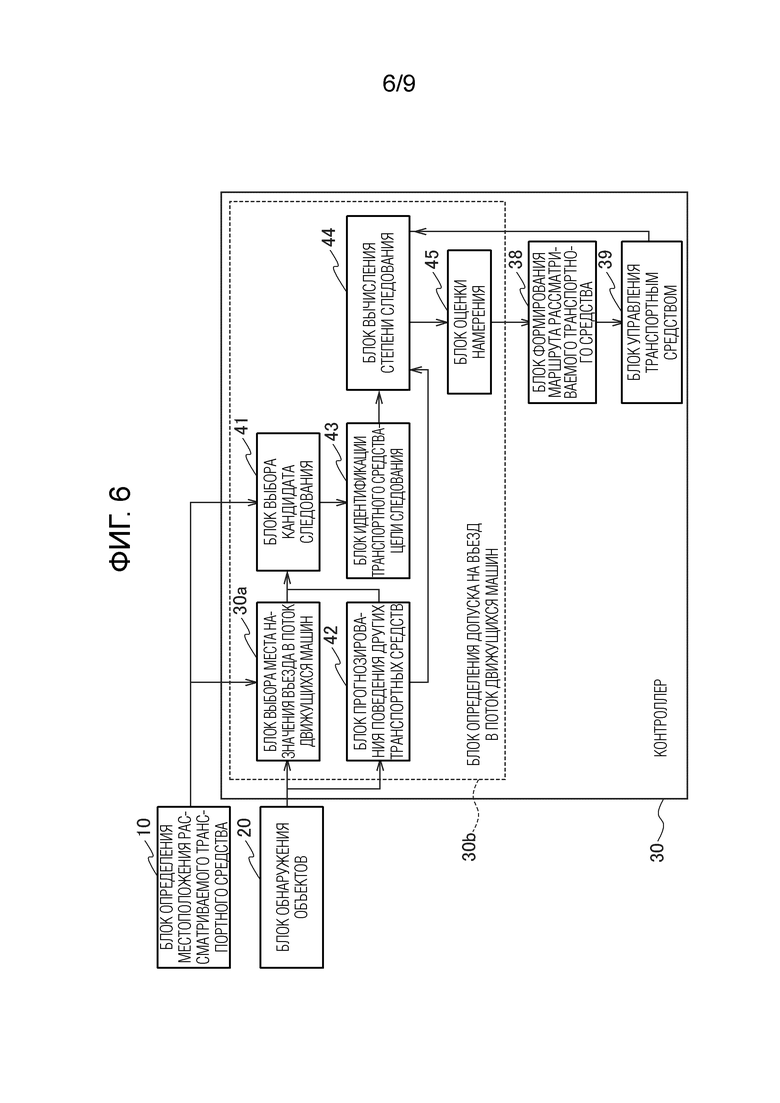
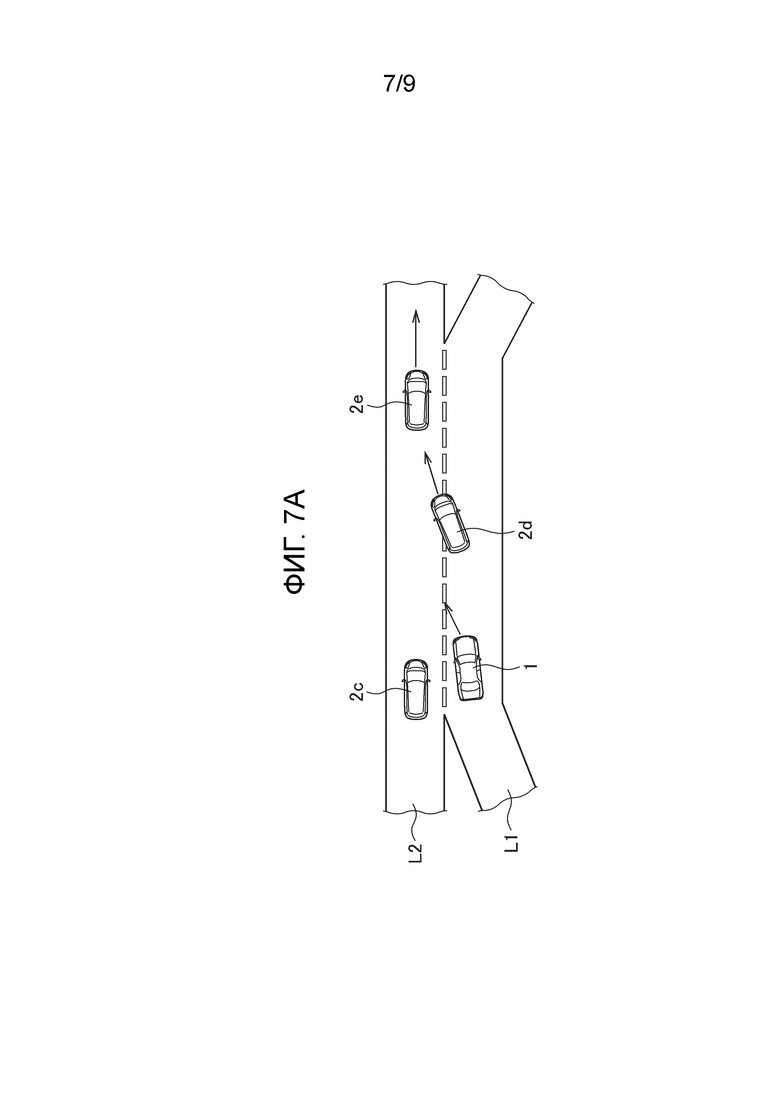

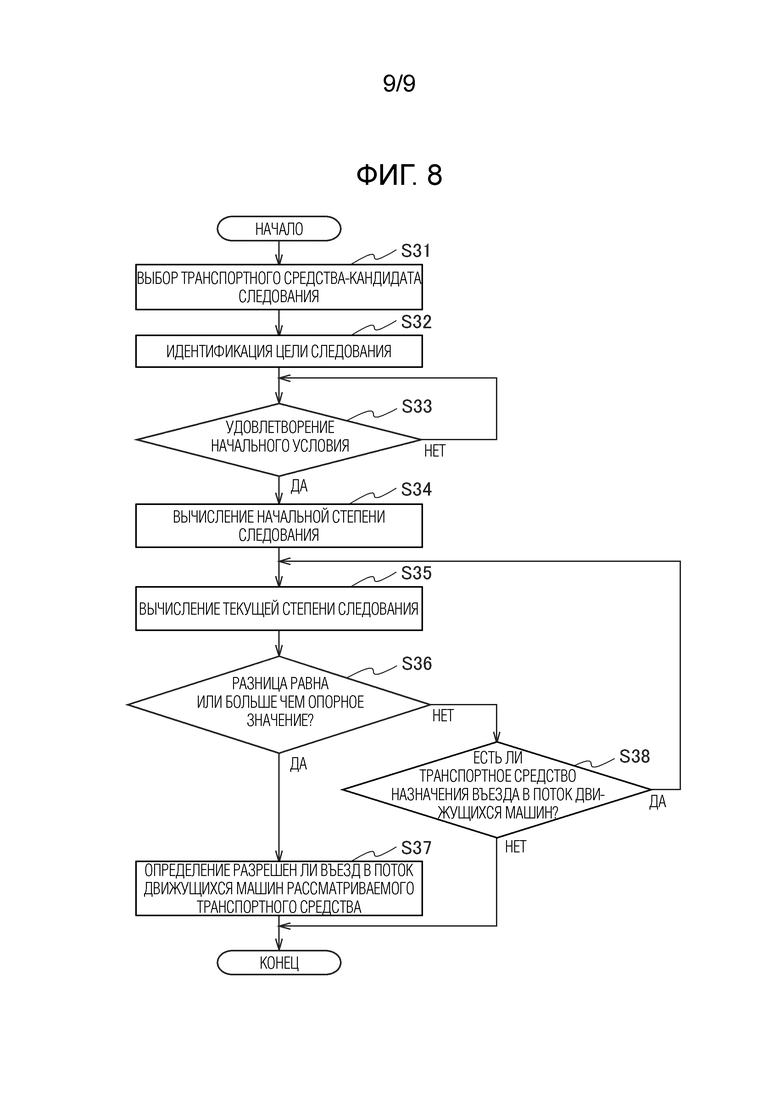
Изобретение относится к способу помощи при движении. Способ помощи при движении, когда рассматриваемая полоса движения, по которой движется рассматриваемое транспортное средство, сливается с соседней полосой движения перед рассматриваемым транспортным средством, который содействует въезду рассматриваемого транспортного средства в поток движущихся машин в соседнюю полосу движения, содержит этапы, получения данных, указывающих структуры полос движения рассматриваемой полосы движения и соседней полосы движения, обнаружения местоположений множества других транспортных средств, движущихся по рассматриваемой полосе движения или соседней полосе движения. Способ также содержит этапы определения того, разрешили ли другие транспортные средства, движущиеся по соседней полосе движения, въезд в поток движущихся машин первого предшествующего транспортного средства и выбора, на основе результата упомянутого определения, транспортного средства назначения въезда в поток движущихся машин среди других транспортных средств, которое будет двигаться впереди или позади рассматриваемого транспортного средства, когда рассматриваемое транспортное средство въезжает в поток движущихся машин в соседнюю полосу движения. Достигается своевременный въезд рассматриваемого транспортного средства в поток движущихся машин. 2 н. и 31 з.п. ф-лы, 9 ил.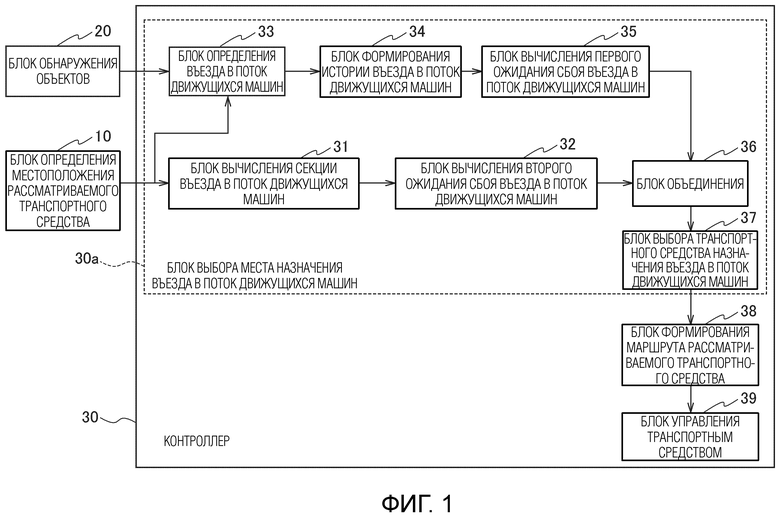
1. Способ помощи при движении для случая, когда рассматриваемая полоса движения, по которой движется рассматриваемое транспортное средство, сливается с соседней полосой движения перед рассматриваемым транспортным средством, который содействует въезду рассматриваемого транспортного средства в поток движущихся машин в соседнюю полосу движения, содержащий:
получение данных, указывающих структуры полос движения рассматриваемой полосы движения и соседней полосы движения;
обнаружение местоположений множества других транспортных средств, движущихся по рассматриваемой полосе движения или соседней полосе движения, в секции въезда в поток движущихся машин, в которой возможен въезд в поток движущихся машин с рассматриваемой полосы движения в соседнюю полосу движения, на основе структур полос движения;
определение, на основе относительного местоположения между первым предшествующим транспортным средством, движущимся впереди рассматриваемого транспортного средства по рассматриваемой полосе движения, и другими транспортными средствами, движущимися по соседней полосе движения, того, разрешили ли другие транспортные средства, движущиеся по соседней полосе движения, въезд в поток движущихся машин первого предшествующего транспортного средства; и
выбор, на основе результата упомянутого определения, транспортного средства назначения въезда в поток движущихся машин среди других транспортных средств, которое будет двигаться впереди или позади рассматриваемого транспортного средства, когда рассматриваемое транспортное средство въезжает в поток движущихся машин в соседнюю полосу движения.
2. Способ помощи при движении по п. 1, в котором
определяется, на основе действий, касающихся въезда в поток движущихся машин среди других транспортных средств, разрешили ли другие транспортные средства, движущиеся по соседней полосе движения, въезд в поток движущихся машин первого предшествующего транспортного средства
3. Способ помощи при движении по п. 1 или 2, в котором
пара из первого другого транспортного средства и второго другого транспортного средства, которому уступило дорогу первое другое транспортное средство во время въезда в поток движущихся машин, формируется в качестве результата упомянутого определения.
4. Способ помощи при движении по любому из пп. 1-3, в котором
количество уступок дороги, когда первое другое транспортное средство уступило дорогу второму другому транспортному средству во время въезда в поток движущихся машин, подсчитывается в качестве результата упомянутого определения.
5. Способ помощи при движении по любому из пп. 1-4, в котором
замедление для уступки дороги первым другим транспортным средством, которое уступило дорогу второму другому транспортному средству во время въезда в поток движущихся машин, сохраняется в качестве результата упомянутого определения.
6. Способ помощи при движении по любому из пп. 1-5, в котором
тот факт, что другие транспортные средства отклонили запрос на въезд в поток движущихся машин, сохраняется в качестве результата упомянутого определения.
7. Способ помощи при движении по любому из пп. 1-6, в котором
для каждого из других транспортных средств первое ожидание сбоя въезда в поток движущихся машин, которое представляет собой ожидание того, что рассматриваемое транспортное средство не сможет въехать в поток движущихся машин перед другим транспортным средством или позади него, вычисляется на основе результата упомянутого определения,
для каждого из других транспортных средств, движущихся по соседней полосе движения в направлении полосы движения в пределах секции въезда в поток движущихся машин, второе ожидание сбоя въезда в поток движущихся машин, которое является ожиданием того, что рассматриваемое транспортное средство не сможет въехать в поток движущихся машин перед другим транспортным средством или позади него, вычисляется на основе местоположений других транспортных средств,
вычисляется ожидание сбоя после объединения, которое представляет собой объединение первого ожидания сбоя въезда в поток движущихся машин и второго ожидания сбоя въезда в поток движущихся машин, и
на основе ожидания сбоя после объединения, транспортное средство назначения въезда в поток движущихся машин, которое будет двигаться впереди или позади рассматриваемого транспортного средства, когда рассматриваемое транспортное средство въезжает в поток движущихся машин в соседнюю полосу движения, выбирается из других транспортных средств.
8. Способ помощи при движении по п. 7, в котором
ожидание сбоя после объединения вычисляется для каждого из других транспортных средств.
9. Способ помощи при движении по п. 7 или 8, в котором
как первое ожидание сбоя въезда в поток движущихся машин, так и второе ожидание сбоя въезда в поток движущихся машин взвешиваются, и
взвешенные первое ожидание сбоя въезда в поток движущихся машин и второе ожидание сбоя въезда в поток движущихся машин объединяются для вычисления ожидания сбоя после объединения.
10. Способ помощи при движении по любому из пп. 7-9, в котором
пара из первого другого транспортного средства и второго другого транспортного средства, которому уступило дорогу первое другое транспортное средство во время въезда в поток движущихся машин, формируется в качестве результата упомянутого определения, и
для каждого из первого и второго других транспортных средств в сформированной паре вычисляется более высокое первое ожидание сбоя въезда в поток движущихся машин, чем у других транспортных средств, не включенных в сформированную пару.
11. Способ помощи при движении по любому из пп. 7-10, в котором
количество уступок дороги, когда первое другое транспортное средство уступило дорогу второму другому транспортному средству во время въезда в поток движущихся машин, подсчитывается в качестве результата упомянутого определения, и
для первого другого транспортного средства вычисляется более высокое первое ожидание сбоя въезда в поток движущихся машин, если количество уступок дороги выше.
12. Способ помощи при движении по любому из пп. 7-11, в котором
замедление для уступки дороги первым другим транспортным средством, которое уступило дорогу второму другому транспортному средству во время въезда в поток движущихся машин, сохраняется в качестве результата упомянутого определения, и
для первого другого транспортного средства вычисляется более высокое первое ожидание сбоя въезда в поток движущихся машин, поскольку замедление для уступки дороги больше.
13. Способ помощи при движении по любому из пп. 7-12, в котором
пара из первого другого транспортного средства и второго другого транспортного средства, которому уступило дорогу первое другое транспортное средство во время въезда в поток движущихся машин, формируется в качестве результата упомянутого определения, и
для второго другого транспортного средства вычисляется более низкое первое ожидание сбоя въезда в поток движущихся машин, чем у первого другого транспортного средства, когда удовлетворяется заранее определенное условие допуска.
14. Способ помощи при движении по п. 13, в котором
заранее определенное условие допуска состоит в том, что расстояние между транспортными средствами между вторым другим транспортным средством и вторым предшествующим транспортным средством, движущимся впереди второго другого транспортного средства, равно или превышает заранее определенное значение.
15. Способ помощи при движении по любому из пп. 7-14, в котором
тот факт, что другие транспортные средства отклонили запрос на въезд в поток движущихся машин, сохраняется в качестве результата упомянутого определения, и
для каждого из других транспортных средств, которые отклонили запрос на въезд в поток движущихся машин, вычисляется более высокое первое ожидание сбоя въезда в поток движущихся машин, чем у первого другого транспортного средства, уступившего дорогу второму другому транспортному средству во время въезда в поток движущихся машин.
16. Способ помощи при движении по любому из пп. 7-15, в котором
второе ожидание сбоя въезда в поток движущихся машин вычисляется на основе структур полос движения и изменения поведения рассматриваемого транспортного средства.
17. Способ помощи при движении по п. 16, в котором
более высокое второе ожидание сбоя въезда в поток движущихся машин вычисляется, если ускорение или замедление рассматриваемого транспортного средства больше.
18. Способ помощи при движении по любому из пп. 7-17, в котором
другое транспортное средство с наименьшим ожиданием сбоя после объединения выбирается в качестве транспортного средства назначения въезда в поток движущихся машин.
19. Способ помощи при движении по любому из пп. 1-18, в котором
транспортное средство - цель следования, которое является целью, за которым следует транспортное средство назначения въезда в поток движущихся машин, идентифицируется среди других транспортных средств, движущихся либо по рассматриваемой полосе движения, либо по соседней полосе движения, либо по полосе движения, смежной с соседней полосой движения,
вычисляется начальная степень следования, которая представляет собой степень следования за транспортным средством - целью следования транспортным средством назначения въезда в поток движущихся машин, когда удовлетворяется заранее определенное начальное условие,
вычисляется текущая степень следования, которая представляет собой степень следования по истечении заранее определенного времени из вычисления начальной степени следования,
вычисляется разница между начальной степенью следования и текущей степенью следования, и
на основе разницы определяется, разрешает ли транспортное средство назначения въезда в поток движущихся машин въезд в поток движущихся машин рассматриваемого транспортного средства.
20. Способ помощи при движении по п. 19, в котором
транспортное средство - цель следования идентифицируется на основе структур полос движения и состояний движения других транспортных средств.
21. Способ помощи при движении по п. 20, в котором
состояния движения других транспортных средств - это местоположения и поведение других транспортных средств.
22. Способ помощи при движении по п. 20 или 21, в котором
состояния движения других транспортных средств - это, по меньшей мере, либо будущие местоположения, либо поведения других транспортных средств, предсказанные на основе местоположений и поведений других транспортных средств.
23. Способ помощи при движении по п. 19, в котором
транспортное средство - цель следования идентифицируется на основе состояния движения транспортного средства назначения въезда в поток движущихся машин и состояний движения других транспортных средств, движущихся впереди транспортного средства назначения въезда в поток движущихся машин в направлении полосы движения.
24. Способ помощи при движении по п. 23, в котором
другое транспортное средство с наименьшей разностью скоростей относительно транспортного средства назначения въезда в поток движущихся машин из других транспортных средств, движущихся впереди транспортного средства назначения въезда в поток движущихся машин в направлении полосы движения, идентифицируется как транспортное средство - цель следования.
25. Способ помощи при движении по п. 23, в котором
транспортное средство - цель следования идентифицируется на основе временного изменения разности скоростей между транспортным средством назначения въезда в поток движущихся машин и каждым из других транспортных средств, движущихся впереди транспортного средства назначения въезда в поток движущихся машин в направлении полосы движения.
26. Способ помощи при движении по п. 23, в котором
когда существует множество других транспортных средств с разностью скоростей относительно транспортного средства назначения въезда в поток движущихся машин равной или меньшей, чем заранее определенное значение, из других транспортных средств, движущихся впереди транспортного средства назначения въезда в поток движущихся машин в направлении полосы движения, другое транспортное средство с наименьшим расстоянием от транспортного средства назначения въезда в поток движущихся машин в направлении полосы движения из других транспортных средств с разностью скоростей относительно транспортного средства назначения въезда в поток движущихся машин, равной или меньшей, чем заранее определенное значение, идентифицируется как транспортное средство - цель следования.
27. Способ помощи при движении по любому из пп. 19-26, в котором
заранее определенное начальное условие состоит в том, что первое предшествующее транспортное средство, движущееся впереди рассматриваемого транспортного средства, начинает въезжать в поток движущихся машин в соседнюю полосу движения или что рассматриваемое транспортное средство начинает выражать намерение въехать в поток движущихся машин в соседнюю полосу движения.
28. Способ помощи при движении по п. 27, в котором
в случае, когда первое предшествующее транспортное средство начинает въезжать в поток движущихся машин в соседнюю полосу движения и когда рассматриваемое транспортное средство начинает выражать намерение въехать в поток движущихся машин в соседнюю полосу движения в течение заранее определенного времени, начальная степень следования вычисляется, когда первое предшествующее транспортное средство начинает въезжать в поток движущихся машин в соседнюю полосу движения.
29. Способ помощи при движении по п. 19, в котором
начальная степень следования и текущая степень следования за транспортным средством - целью следования посредством транспортного средства назначения въезда в поток движущихся машин вычисляются, соответственно, на основе местоположения и состояния движения транспортного средства - цели следования и местоположения и состояния движения транспортного средства назначения въезда в поток движущихся машин.
30. Способ помощи при движении по п. 19, в котором
начальная степень следования и текущая степень следования за транспортным средством-целью следования посредством транспортного средства назначения въезда в поток движущихся машин вычисляются на основании по меньшей мере одного из расстояния между транспортными средствами или временного интервала между транспортным средством - целью следования и транспортным средством места назначения въезда в поток движущихся машин.
31. Способ помощи при движении по п. 19, в котором
начальная степень следования и текущая степень следования сравниваются друг с другом, чтобы определить, добавлено ли расстояние между транспортными средствами, необходимое для въезда в поток движущихся машин рассматриваемого транспортного средства, между транспортным средством - целью следования и транспортным средством назначения въезда в поток движущихся машин, и
на основе результата определения определяется, разрешает ли транспортное средство назначения въезда в поток движущихся машин въезд в поток движущихся машин рассматриваемого транспортного средства.
32. Способ помощи при движении по п. 19, в котором
начальная степень следования и текущая степень следования сравниваются друг с другом, чтобы определить, добавлен ли временной интервал, необходимый для въезда в поток движущихся машин рассматриваемого транспортного средства, между транспортным средством - целью следования и транспортным средством назначения въезда в поток движущихся машин, и
на основе результата определения определяется, разрешает ли транспортное средство назначения въезда в поток движущихся машин въезд в поток движущихся машин рассматриваемого транспортного средства.
33. Устройство помощи при движении, которое в случае, когда рассматриваемая полоса движения, по которой движется рассматриваемое транспортное средство, сливается с соседней полосой движения перед рассматриваемым транспортным средством, использует компьютер, включающий в себя блок управления и блок хранения, чтобы содействовать въезду рассматриваемого транспортного средства в поток движущихся машин в соседнюю полосу движения, при этом
блок хранения хранит данные, указывающие структуры полос движения рассматриваемой полосы движения и соседней полосы движения, и
блок управления
обнаруживает местоположения множества других транспортных средств, движущихся по рассматриваемой полосе движения или соседней полосе движения, в секции въезда в поток движущихся машин, в которой возможен въезд в поток движущихся машин с рассматриваемой полосы движения в соседнюю полосу движения, на основе структур полос движения;
определяет, разрешили ли другие транспортные средства, движущиеся по соседней полосе движения, въезд в поток движущихся машин первому предшествующему транспортному средству, на основе местоположений первого предшествующего транспортного средства, движущегося впереди рассматриваемого транспортного средства на рассматриваемой полосе движения, и другого транспортные средства, движущиеся по соседней полосе движения; и
выбирает, на основе результата упомянутого определения, среди других транспортных средств, транспортное средство назначения въезда в поток движущихся машин, которое будет двигаться впереди или позади рассматриваемого транспортного средства, когда рассматриваемое транспортное средство въезжает в поток движущихся машин в соседнюю полосу движения.
| JP 6245186 B2, 13.12.2017 | |||
| JP 6337435 B2, 06.06.2018 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ | 2014 |
|
RU2624392C1 |

