Изобретение относится к области измерительной техники, а именно к измерениям добротности механических колебательных систем с одной степенью свободы. Такая задача часто возникает при использовании различных виброметрических датчиков: вибровискозиметров, вибровесов и других.
Известен способ определения добротности механической колебательной системы, совершающей колебания под действием периодической вынуждающей силы, по которому выполняют следующую последовательность операций:
- снимают амплитудно-частотную характеристику колеблющейся массы механической колебательной системы, снабженной датчиком положения;
- с учетом скорости и ускорения вынужденных колебаний вычисляют резонансную кривую, характеризующую механическую колебательную систему, максимум которой соответствует собственной частотеω0 колебательной системы;
- условно определяют ширину резонансной кривой на половине ее высоты. Ширина резонансной кривой выделяет область частот Q2-Q1, лежащих соответственно до и после резонанса;
- добротность Q механической колебательной системы определяют по формуле Q=ω0/Ω2-Ω1 (далее для частоты используется общепринятое обозначение "ω") [Ю.И. Иориш, Виброметрия, Изд. второе.- М.: Гос. изд-во машиностроительной литературы, 1963. - С. 179].
Известный способ имеет следующие недостатки: достаточно высокие сложность и длительность процедуры измерения. Снятие с достаточной точностью амплитудно-частотной характеристики колебательной системы требует многочисленных шагов дискретного изменения частоты ω вынуждающей силы. Измерение с достаточной точностью амплитуды выходного сигнала датчика положения и сохранения в памяти каждого результата измерения. Число указанных шагов пропорционально диапазону изменения частоты от ω1 до ω2. Сложность и длительность известного способа особенно заметны при организации процедуры автоматического непрерывного по времени определения добротности механической колебательной системы в процессе ее эксплуатации, что существенно ограничивают скорость и время определения добротности.
Техническая задача изобретения заключается в том, чтобы уменьшить время определения добротности механической колебательной системы с сохранением точности измерений.
Предлагается способ определения добротности механической колебательной системы, при котором под действием периодической вынуждающей силы изменяют частоту вынужденных колебаний колеблющейся массы механической колебательной системы, снабженной датчиком положения, отличающийся тем, что изменяют частоту вынужденных колебаний и экспериментально определяют частоту собственных колебаний механической колебательной системы ω0 из условия сдвига фазы между вынуждающей силой и выходным сигналом датчика положения, равного π/2, экспериментально определяют частоту ω1 вынуждающей силы из условия сдвига фазы ϕ(ω1) между вынуждающей силой и выходным сигналом датчика положения, равного π/2+ϕ1, при этом модуль фазового сдвига |ϕ1|<π/2, и добротность Q механической колебательной системы определяют по формуле:
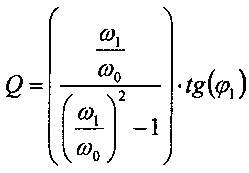 .
.
Предлагаемый способ основан на том факте, что для механических колебательных систем с одной степенью свободы на собственной частоте ω0 сдвиг фазы ϕ на выходе датчика положения относительно вынуждающей силы всегда равен π/2 при любом значении добротности колебательной системы Q [там же с. 173]. Это следует из теоретически известной фазочастотной характеристики такой системы [там же с. 170, уравнение (5.15), с учетом (4.90), (5.13)]:
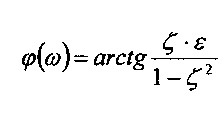 или
или 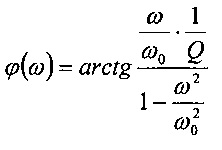 или
или 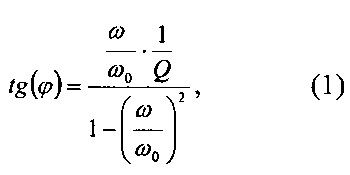
где ω - частота вынужденных колебаний; ξ=ω/ω0; Q=1/ε.
При изменении частоты от ω0 до ω1 фазовый сдвиг между вынуждающей силой и выходным сигналом датчика положения изменится и становится равным π/2+ϕ1, и в соответствии с (1), будет справедливо следующее выражение:

Как известно, 
Из (2) и (3) добротность определяется как:

где ω1 - частота вынужденных колебаний, на которой фазовый сдвиг равен π/2+ϕ1.
С учетом выше изложенного заявляемый способ реализуется следующим образом.
Экспериментально определяют частоту вынуждающей силы для механической колебательной системы равной ω0, при которой сдвиг фазы ϕ между вынуждающей силой и выходным сигналом датчика положения равен π/2 на основании известной фазочастотной характеристики (1). Далее частоту вынуждающей силы для колебательной системы изменяют до значения ω1, при которой сдвиг фазы между вынуждающей силой и выходным сигналом датчика положения становится равным π/2+ϕ1 при этом ϕ1 произвольно выбирается оператором из условия |ϕ1|<π/2. Например, ϕ1 можно выбрать равным π/4, при этом tg(ϕ1)=1. При уменьшении задаваемого значения ϕ1 уменьшается диапазон перестройки частоты от ω0 до ω1, что повышает оперативность определения текущего значения добротности Q механической колебательной системы. Поэтому целесообразно задавать минимальное значение ϕ1, при котором погрешность определения добротности остается допустимой.
Зная значения ω0, ω1 и tg(ϕ1), по уравнению (4) находят значение добротности механической колебательной системы Q расчетным путем, преимущественно программными средствами. Таким образом, определение добротности по заявляемому способу требует только двух экспериментальных операций определения значений частот ω0 и ω1.
При реализации заявляемого способа для повышения точности определения добротности целесообразно использовать цифровые способы измерения и контроля частоты и фазы.
Заявляемый способ позволяет существенно упростить процедуру определения добротности за счет исключения операций измерения и запоминания текущих значений амплитуды выходного сигнала датчика положения колеблющейся массы, исключены операции по нахождению производной, максимума амплитуды и граничных значений амплитуды выходного сигнала датчика положения колеблющейся массы. Также оперативность повышается за счет сокращения требуемого диапазона перестройки частоты вынуждающей силы.
Заявляемый способ может быть автоматизирован с помощью микропроцессорной техники и позволяет осуществить определение добротности механической колебательной системы в процессе ее эксплуатации.
Изобретение относится к метрологии, в частности, к способам измерения добротности механической колебательной системы. Способ определения добротности механической колебательной системы, снабженной датчиком положения, заключается в том, что экспериментально определяют частоту собственных колебаний механической колебательной системы ω0 из условия сдвига фазы между вынуждающей силой и выходным сигналом датчика положения, равного π/2, экспериментально устанавливают частоту ω1 вынуждающей силы из условия сдвига фазы между вынуждающей силой и выходным сигналом датчика положения, равного π/2+ϕ1, при этом модуль фазового сдвига |ϕ1|<π/2, и добротность Q механической колебательной системы определяют по известной формуле, учитывающей тангенс сдвига фаз, частоту собственных колебаний механической системы, частоту вынуждающей силы. Технические результаты – повышение точности, упрощение и ускорение процедуры определения добротности.
Способ определения добротности механической колебательной системы, при котором под действием периодической вынуждающей силы изменяют частоту вынужденных колебаний колеблющейся массы механической колебательной системы, снабженной датчиком положения, отличающийся тем, что экспериментально определяют частоту собственных колебаний механической колебательной системы ω0 из условия сдвига фазы между вынуждающей силой и выходным сигналом датчика положения, равного π/2, экспериментально устанавливают частоту ω1 вынуждающей силы из условия сдвига фазы между вынуждающей силой и выходным сигналом датчика положения, равного π/2+ϕ1, при этом модуль фазового сдвига |ϕ1|<π/2, и добротность Q механической колебательной системы определяют по формуле:

| Ю.И | |||
| Иориш, Виброметрия, Изд | |||
| второе.- М.: Гос | |||
| изд-во машиностроительной литературы, 1963 | |||
| - С | |||
| Вагонетка для движения по одной колее в обоих направлениях | 1920 |
|
SU179A1 |
| Черторийский А | |||
| А | |||
| и др | |||
| Совершенствование оптоэлектронных и мехатронных средств исследования наноструктурных термостимулированных процессов в многокомпонентных жидкостях | |||
| Отчет о НИР // УФИРЭ им | |||
| В | |||
| А | |||
| Котельникова РАН, Ульяновск, 25.01.2016 (стр | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Изменитель вязкости | 1979 |
|
SU842486A1 |
| Фазовый способ определения характеристик рассеяния энергии колебаний | 1983 |
|
SU1165937A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РЕЗОНАНСНОЙ ЧАСТОТЫ, ДОБРОТНОСТИ И АМПЛИТУДЫ СТАЦИОНАРНЫХ РЕЗОНАНСНЫХ КОЛЕБАНИЙ | 2004 |
|
RU2285247C2 |
| US 20070119258 A1, 31.05.2007 | |||
| WO 2004032050 A2, 15.04.2004. | |||

