Область техники, к которой относится изобретение
Настоящее изобретение относится к навигационному устройству, способам управления работой и мобильному оконечному устройству и пригодно для применения, например, в навигационном устройстве, способе управления работой и мобильном оконечном устройстве, в которых определяется ориентация, например, геомагнитным датчиком и отображается карта при прикреплении устройства к транспортному средству или отсоединения от него.
Уровень техники
Навигационные устройства, установленные, например, в передвигающихся транспортных средствах, стали широко распространенными. Такое навигационное устройство вычисляет текущее положение на основе информации позиционирования (например, сигналов системы глобального позиционирования (GPS)), принятой от средств определения положения, таких как спутники GPS, и отображает положение и направление передвижения транспортного средства на экране с картой.
Некоторые навигационные устройства являются переносными и могут отсоединяться от транспортного средства и легко переноситься пользователем.
Предложено переносное навигационное устройство (называемое здесь персональным навигационным устройством (ПНУ) (PND)), которое включает в себя геомагнитный датчик и вычисляет ориентацию за счет определения геомагнетизма (см., например, выложенную заявку на патент Японии №2008-076374).
В дополнение к ПНУ недавно предложены мобильные оконечные устройства с функцией навигации. Такое мобильное оконечное устройство также включает в себя геомагнитный датчик и вычисляет ориентацию за счет определения геомагнетизма.
Сущность изобретения
Согласно характеристикам геомагнитного датчика, когда геомагнитный датчик окружен, например, большим металлическим телом, таким как корпус транспортного средства, трудно определить геомагнитные значения, представляющие точную ориентацию, вследствие магнитного воздействия магнитного поля рассеяния и изоляции геомагнетизма.
В этом случае геомагнитный датчик непрерывно работает, даже если трудно определить геомагнитные значения, представляющие точную ориентацию. Соответственно, имеется проблема в том, что теряется электрическая мощность для работы для работы геомагнитного датчика.
В свете вышеописанной ситуации желательно обеспечить навигационное устройство, способ управления работой и мобильное оконечное устройство, в которых можно снизить потребление электрической мощности.
Согласно примерному варианту осуществления описание раскрывает навигационное устройство. Это навигационное устройство включает в себя: геомагнитный датчик, выполненный с возможностью определять геомагнитное поле навигационного устройства; блок вычисления ориентации, выполненный с возможностью вычисления ориентации навигационного устройства на основе определенного геомагнитного поля; блок обнаружения опоры, выполненный с возможностью обнаружения того, что навигационное устройство присоединено к опоре, и выдачи сигнала, индицирующего, что навигационное устройство присоединено к опоре; и блок управления работой, выполненный с возможностью принимать сигнал, выдаваемый блоком обнаружения опоры, и управлять блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства на основе определенного геомагнитного поля.
Блок управления работой может быть выполнен с возможностью управлять блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, путем деактивации геомагнитного датчика.
Блок управления работой может быть выполнен с возможностью управлять блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, путем деактивации блока вычисления ориентации.
Блок управления работой может быть выполнен с возможностью управлять блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, путем управления блоком вычисления ориентации игнорировать сигнал, принятый от геомагнитного датчика.
Навигационное устройство включает в себя далее блок определения угла пространственного положения, выполненный с возможностью определять угол пространственного положения, указывающий угол наклона навигационного устройства по отношению к наземной плоскости.
Блок вычисления ориентации может быть выполнен с возможностью вычислять ориентацию навигационного устройства на основе найденного угла пространственного положения и определенного геомагнитного поля.
Блок управления работой может быть выполнен с возможностью управлять блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, путем деактивации блока определения пространственного угла.
Блок управления работой может быть выполнен с возможностью управлять блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, путем деактивации блока вычисления ориентации.
Блок управления работой может быть выполнен с возможностью управлять блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, путем управления блоком вычисления ориентации игнорировать сигнал, принятый от блока определения пространственного угла.
Навигационное устройство может также быть мобильным телефонным устройством.
Согласно другому примерному варианту осуществления описание раскрывает энергонезависимый машиночитаемый носитель, содержащий команды компьютерной программы, которые при исполнении навигационным устройством заставляют это навигационное устройство выполнять способ. Этот способ включает в себя: этап, на котором определяют в геомагнитном датчике навигационного устройства геомагнитное поле навигационного устройства; этап, на котором вычисляют в блоке вычисления ориентации навигационного устройства ориентацию навигационного устройства на основе определенного геомагнитного поля; этап, на котором определяют в блоке обнаружения опоры навигационного устройства, что навигационное устройство присоединено к опоре, и выдают сигнал, указывающий, что навигационное устройство присоединено к опоре; и этап, на котором принимают в блоке управления работой навигационного устройства сигнал, выданный из блока обнаружения опоры, и управляют блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства на основе определенного геомагнитного поля.
Управление блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, может включать в себя деактивацию геомагнитного датчика.
Управление блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, может включать в себя деактивацию блока вычисления ориентации.
Управление блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, может включать в себя управление блоком вычисления ориентации игнорировать сигнал, принятый от геомагнитного датчика.
Навигационное устройство согласно этому варианту осуществления может быть мобильным телефонным устройством.
Согласно еще одному примерному варианту осуществления описание раскрывает способ. Этот способ содержит: этап, на котором определяют в геомагнитном датчике навигационного устройства геомагнитное поле навигационного устройства; этап, на котором вычисляют в блоке вычисления ориентации навигационного устройства ориентацию навигационного устройства на основе определенного геомагнитного поля; этап, на котором определяют в блоке обнаружения опоры навигационного устройства, что навигационное устройство присоединено к опоре, и выдают сигнал, указывающий, что навигационное устройство присоединено к опоре; и этап, на котором принимают в блоке управления работой навигационного устройства сигнал, выданный из блока обнаружения опоры, и управляют блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства на основе определенного геомагнитного поля.
Управление блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, может включать в себя деактивацию геомагнитного датчика.
Управление блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, может включать в себя деактивацию блока вычисления ориентации.
Управление блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, может включать в себя управление блоком вычисления ориентации игнорировать сигнал, принятый от геомагнитного датчика.
Навигационное устройство согласно этому варианту осуществления может быть мобильным телефонным устройством.
Краткое описание чертежей
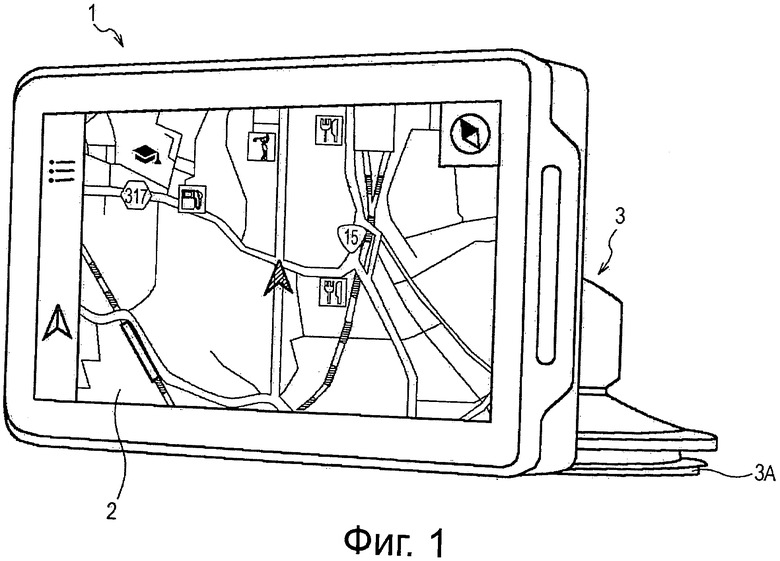
Фиг.1 является условной схемой, иллюстрирующей общую структуру ПНУ.
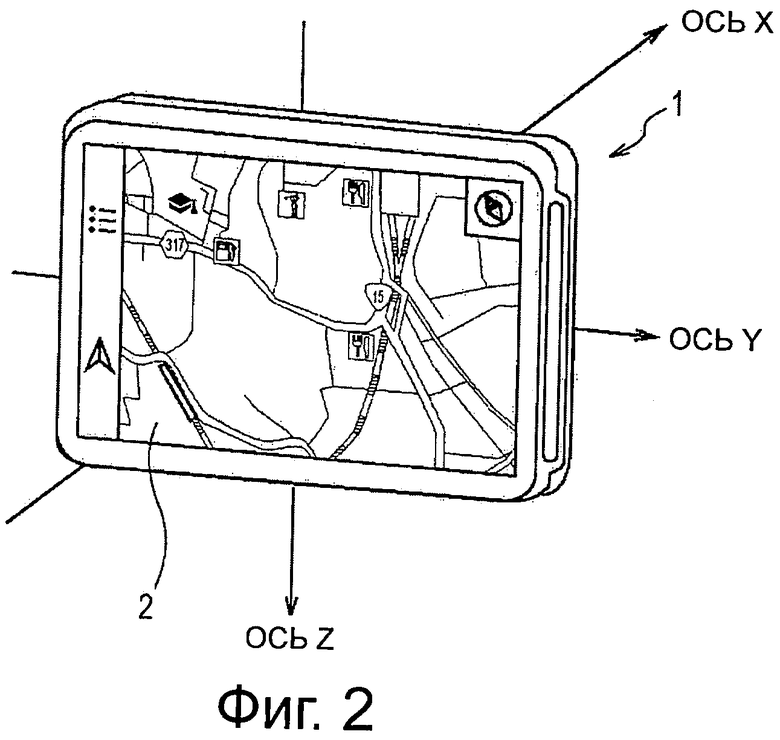
Фиг.2 является условной схемой, иллюстрирующей определение системы координат ПНУ.
Фиг.3 является условной схемой, иллюстрирующей структуру датчика ПНУ.
Фиг.4А и 4В являются условными схемами, иллюстрирующими, как транспортное средство едет на вогнутой дороге и на выпуклой дороге соответственно.
Фиг.5 является условной схемой, иллюстрирующей, как транспортное средство поворачивает.
Фиг.6 является условной схемой, иллюстрирующей способ вычисления текущего положения с помощью скорости и угла.
Фиг.7 является условной схемой, иллюстрирующей схемную структуру ПНУ.
Фиг.8А и 8В являются условными схемами, иллюстрирующими примеры навигационных дисплеев.
Фиг.9 является условной схемой, иллюстрирующей структуру блока вычисления скорости.
Фиг.10 является условной схемой, иллюстрирующей вибрацию, вызванную опорой.
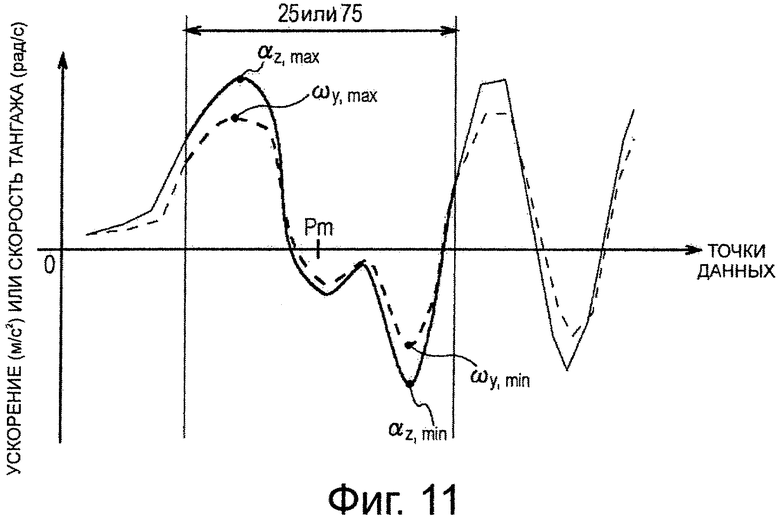
Фиг.11 является графиком, иллюстрирующим соотношение между максимальным и минимальным значениями.
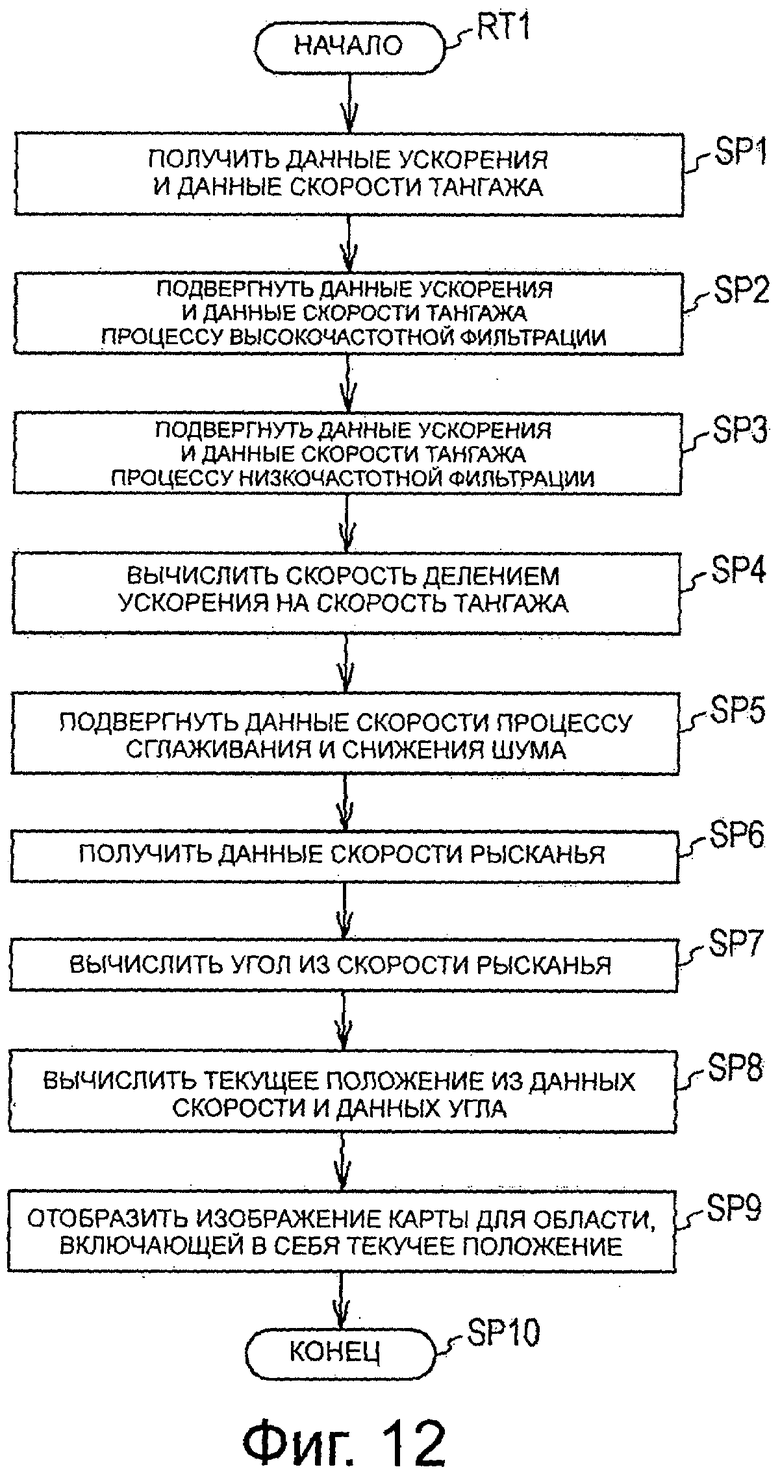
Фиг.12 является блок-схемой алгоритма, иллюстрирующей процедуру процесса вычисления текущего положения с помощью процесса вычисления скорости.
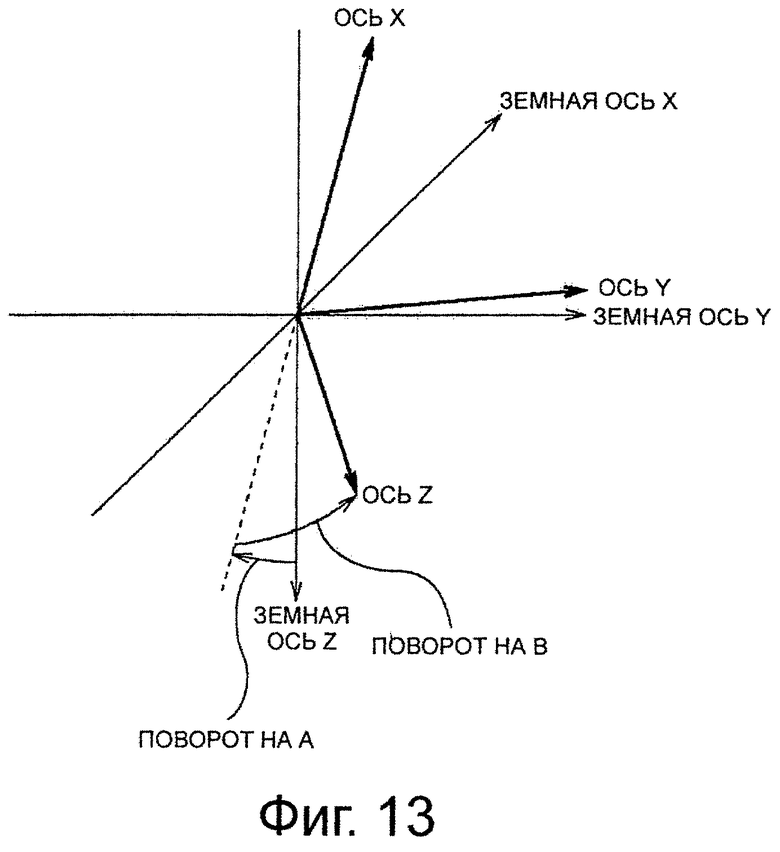
Фиг.13 является условной схемой, иллюстрирующей коррекцию геомагнитного вектора.
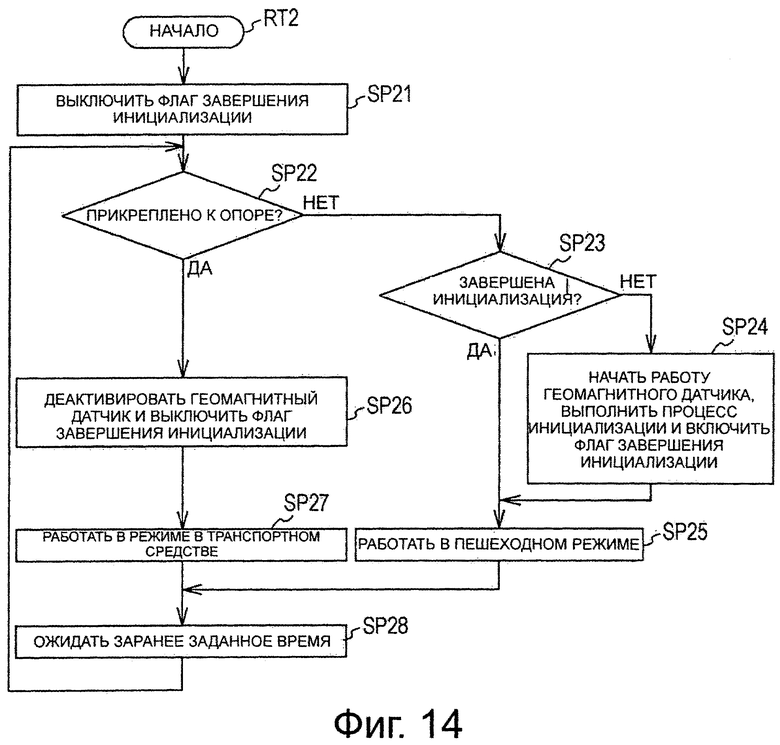
Фиг.14 является блок-схемой алгоритма, иллюстрирующей процедуру процесса управления работой.
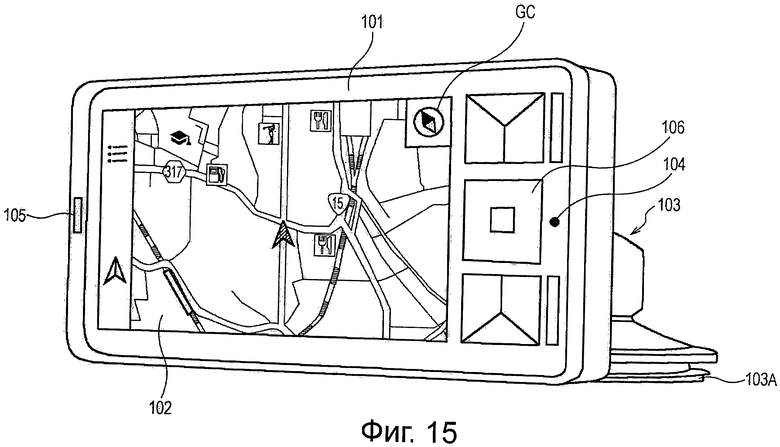
Фиг.15 является условной схемой, иллюстрирующей общую структуру мобильного телефонного устройства.
Фиг.16 является условной схемой, иллюстрирующей схемную структуру мобильного телефонного устройства.
Подробное описание изобретения
Варианты осуществления настоящего изобретения будут пояснены в следующем порядке:
1. Первый вариант осуществления (пример ПНУ)
2. Второй вариант осуществления (пример мобильного телефонного устройства)
3. Другие варианты осуществления.
1. Первый вариант осуществления
1-1. Структура ПНУ
1-1-1. Внешняя структура ПНУ
Как проиллюстрировано на фиг.1, ПНУ 1 согласно первому варианту осуществления настоящего изобретения включает в себя дисплейный блок 2 на передней стороне ПНУ 1. Изображение карты или тому подобное, соответствующее данным карты, хранящимся, например, в энергонезависимой памяти (не показано), установленным в ПНУ 1, может воспроизводиться на дисплейном блоке 2.
ПНУ 1 сконструирован так, что ПНУ 1 является переносным и может легко переноситься пользователем и предполагается для использования в доме пользователя, кабине транспортного средства или вне кабины транспортного средства.
Опора 3 прикреплена к приборному щитку транспортного средства 9, который будет описано ниже, присоской 3А и электрически соединена с аккумулятором в транспортном средстве 9.
ПНУ 1 может прикрепляться к опоре 3 или сниматься с опоры 3, которая служит в качестве базового блока. В прикрепленном состоянии ПНУ 1 удерживается опорой 3 и механически и электрически соединено с опорой 3.
Таким образом, ПНУ 1 может работать от электрического питания, подаваемого из аккумулятора в транспортном средстве 9 через опору 3. ПНУ 1 может также работать независимо от электрического питания, подаваемого из встроенного аккумулятора, когда ПНУ 1 отсоединено от опоры 3.
ПНУ 1 располагается так, что дисплейный блок 2 практически перпендикулярен направлению перемещения транспортного средства 9. В этом состоянии, как иллюстрируется на фиг.2, система координат ПНУ 1 определяется так, что ось Х проходит по направлению вперед-назад (направление перемещения) транспортного средства 9, ось Y проходит горизонтально в направлении, перпендикулярном к оси X, а ось Z проходит вертикально.
В этой системе координат направление перемещения транспортного средства 9 определяется как положительное направление оси X, направление вправо определяется как положительное направление оси Y, а направление вниз определяется как положительное направление оси Z.
1-1-2. Структура датчика ПНУ
Как иллюстрируется на фиг.3, ПНУ 1 включает в себя датчик 4 ускорения по трем осям, гироскопический датчик 5 по оси Y, гироскопический датчик 6 по оси Z, датчик 7 атмосферного давления и геомагнитный датчик 8.
Датчик 4 ускорения по трем осям определяет ускорение αx вдоль оси X, ускорение αy вдоль оси Y и ускорение αz вдоль оси Z как значения напряжения.
Гироскопический датчик 5 по оси Y, гироскопический датчик 6 по оси Z и датчик 7 атмосферного давления соответственно определяют угловую скорость ωy вокруг оси Y (называемую здесь скоростью тангажа), угловую скорость ωz вокруг оси Z (называемую здесь скоростью рысканья) и давление PR окружающей атмосферы как значения напряжения.
Геомагнитный датчик 8 определяет геомагнетизм и получает геомагнитные значения Mx, My и Mz по оси X, оси Y и оси Z соответственно как значения напряжения.
1-2. Принцип вычисления
ПНУ 1 согласно варианту осуществления настоящего изобретения может выполнять автономный процесс определения положения. В этом процессе скорость транспортного средства 9 вычисляется на основе ускорений, скорости тангажа и т.д., определенных датчиком 4 ускорений по трем осям, гироскопическим датчиком 5 по оси Х и т.д., а затем вычисляется текущее положение. Теперь будет описан основной принцип для вычисления скорости и текущего положения.
1-2-1. Принцип вычисления скорости
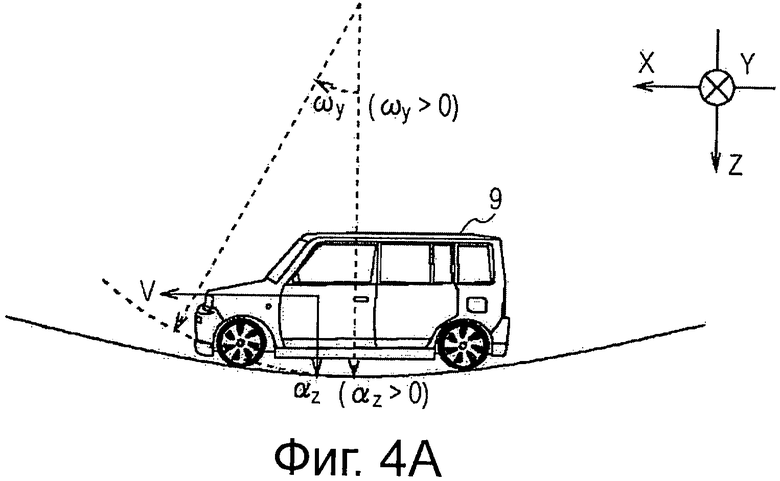
В нижеследующем описании сначала будет пояснен основной принцип вычисления скорости транспортного средства 9. В действительности, дороги, по которым ездит транспортное средство 9, редко бывают гладкими, и транспортное средство 9 обычно едет по дороге, имеющей в целом вогнутую форму, как иллюстрируется на фиг.4А, или по дороге, имеющей в целом выпуклую форму, как иллюстрируется на фиг.4В.
Система координат транспортного средства 9 определяется так, что ось Х проходит по направлению вперед-назад (направление перемещения) транспортного средства 9, ось Y проходит горизонтально в направлении, перпендикулярном к оси X, а ось Z проходит вертикально.
Когда, например, ПНУ 1 (не показано) установлено на приборной панели транспортного средства 9 и транспортное средство 9 едет по вогнутой дороге (фиг.4А), ПНУ 1 управляет работой предусмотренного в нем датчика 4 ускорения по трем осям (фиг.3), чтобы он определял ускорение αz вниз по оси Z с частотой дискретизации, например, 50 Гц.
ПНУ 1 также управляет работой предусмотренного в нем гироскопического датчика 5 по оси Y (фиг.3), чтобы он определял угловую скорость ωy вокруг оси Y (скорость тангажа), которая перпендикулярна направлению перемещения, с частотой дискретизации 50 Гц.
В ПНУ 1 ускорение αy вниз по оси Z определяется как положительное ускорение. Помимо этого скорость ωy тангажа в то время, когда транспортное средство отклоняется вверх по отношению к направлению своего перемещения по воображаемой окружности, образованной вдоль вогнутой дороги, как показано на фиг.4А, определяется как положительная скорость тангажа.
ПНУ 1 вычисляет скорость V в направлении перемещения 50 раз в секунду на основе ускорения αz, определенного датчиком 4 ускорения по трем осям, и скорости ωy тангажа, определенной гироскопическим датчиком 5 по оси Y, согласно следующему уравнению (1):
Когда транспортное средство 9 едет по выпуклой дороге (фиг.4 В), ПНУ 1 управляет работой датчика 4 ускорения по трем осям, чтобы он определял ускорение αz' вверх по оси Z с частотой дискретизации, например, 50 Гц. ПНУ 1 также управляет работой предусмотренного в нем гироскопического датчика 5 по оси Y, чтобы он определял скорость ωy' тангажа вокруг оси Y с частотой дискретизации, например, 50 Гц.
ПНУ 1 вычисляет скорость V' в направлении перемещения 50 раз в секунду на основе ускорения αz', определенного датчиком 4 ускорения по трем осям, и скорости ωy' тангажа, определенной гироскопическим датчиком 5 по оси Y, согласно следующему уравнению:
В вышеприведенном описании отрицательное ускорение αz выражается как ускорение αz' для удобства пояснения. Однако на практике датчик 4 ускорения по трем осям определяет ускорение αz' как отрицательное значение для ускорения αz. Это применимо также к скорости ωy' тангажа. Хотя отрицательная скорость ωy тангажа выражается как скорость ωy' тангажа, гироскопический датчик 5 по оси Y определяет скорость ωy' тангажа как отрицательное значение для скорости ωy тангажа. Поэтому на практике скорость V' вычисляется как скорость V.
1-2-2. Принцип вычисления текущего положения
Далее будет поясняться принцип вычисления текущего положения для вычисления текущего положения на основе скорости V, вычисленной вышеописанным принципом вычисления скорости, и угловой скорости ωz вокруг оси Z.
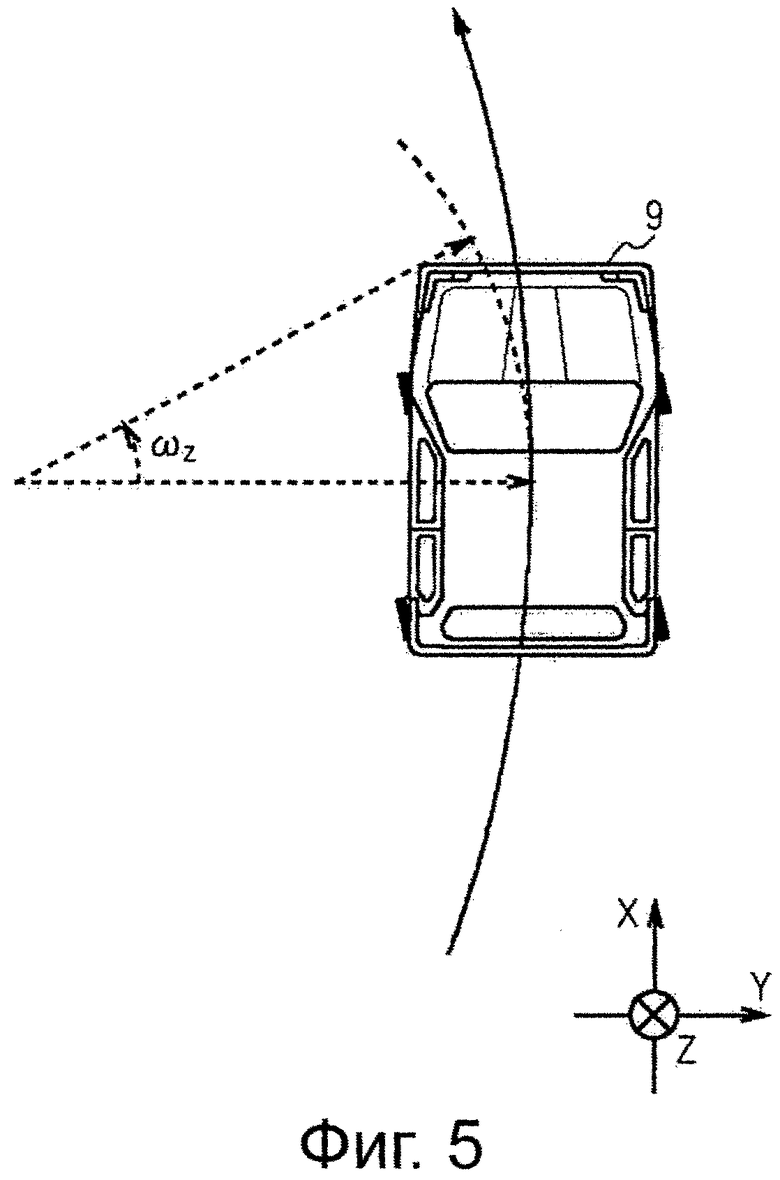
Как иллюстрируется на фиг.5, ПНУ 1 (не показан) управляет работой гироскопического датчика 6 по оси Z (фиг.3), предусмотренного в ПНУ 1, чтобы он определял угловую скорость ωz вокруг оси Z (скорость рысканья) с частотой дискретизации, например, 50 Гц, когда транспортное средство 9, например, поворачивает влево.
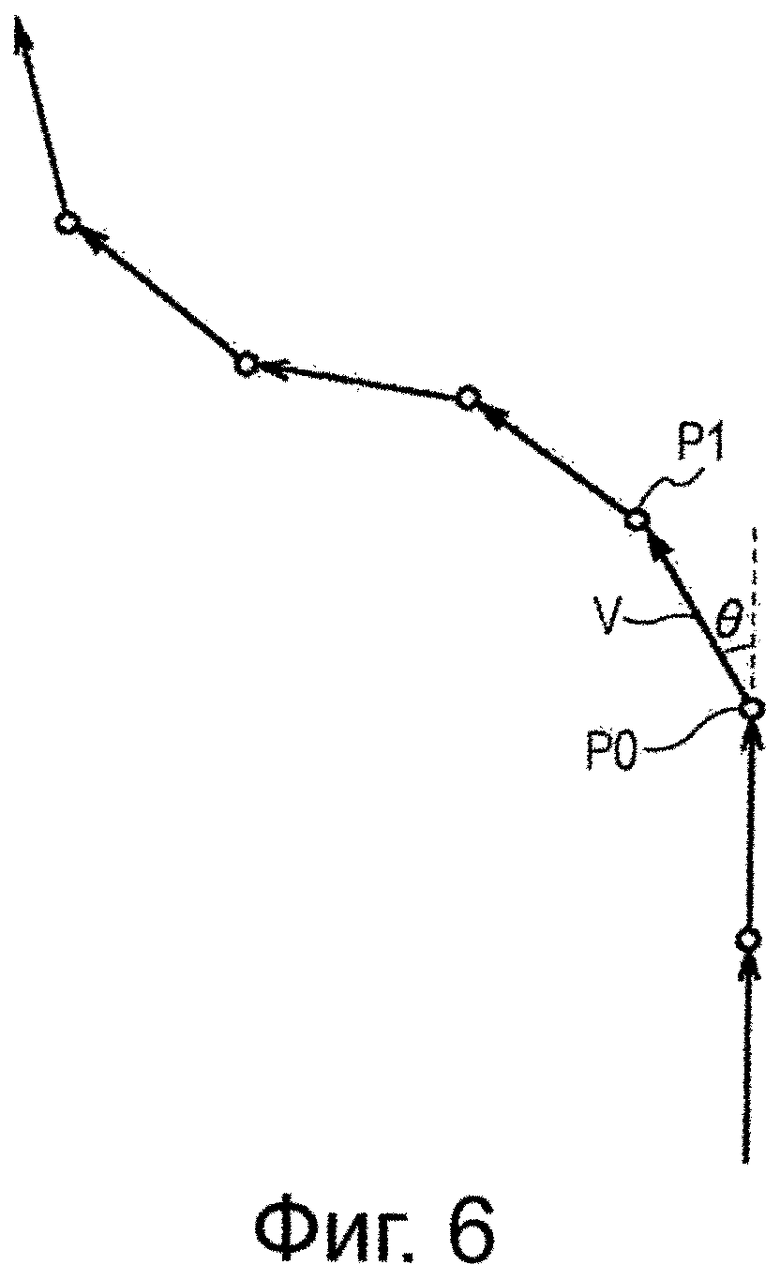
Затем, как иллюстрируется на фиг.6, ПНУ 1 определяет изменение между предыдущим положением Р0 и текущим положением Р1 на основе скорости V в предыдущем положении Р0 и угла θ. Угол θ определяется умножением скорости ωz рыскания, определенной гироскопическим датчиком 6 по оси Z, на период дискретизации (0,02 с в данном случае). Затем ПНУ 1 вычисляет текущее положение Р1 добавлением изменения к предыдущему положению Р0.
1-3. Схемная структура ПНУ
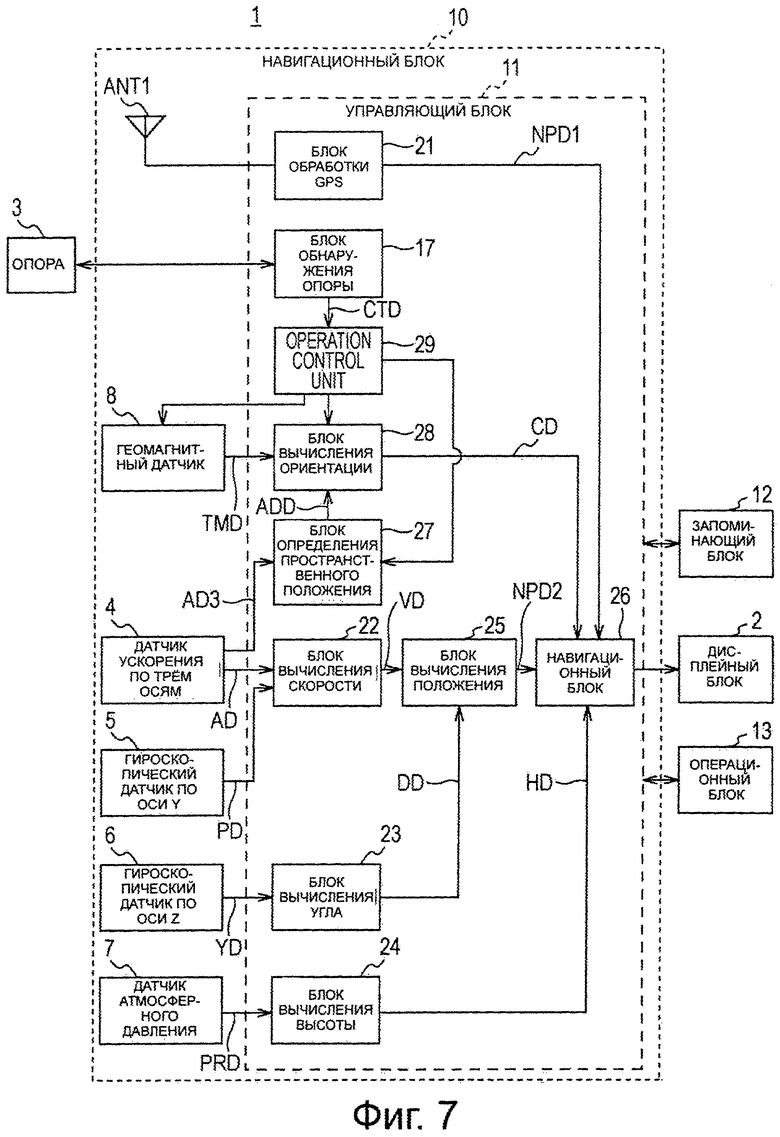
Теперь будет поясняться схемная структура ПНУ 1. Как иллюстрируется на фиг.7, ПНУ 1 главным образом включает в себя навигационный блок 10, который содержит управляющий блок 11 и разнообразные датчики и который обеспечивает навигационную функцию.
Управляющий блок 11 состоит из центрального процессора (ЦП) (CPU), а общая работа управляющего блока 11 управляется основной программой, считанной из запоминающего блока 12, такого как энергонезависимая память.
Помимо этого в ПНУ 1 управляющий блок 11 осуществляет процесс управления работой, который будет описан ниже, в соответствии с различными прикладными программами, считанными из запоминающего блока 12.
На поверхности дисплейного блока 2 предусмотрен операционный блок 13, состоящий из сенсорной панели, с помощью которой пользователь может выполнять операцию касания. Управляющий блок 1 воспроизводит экран, направляющий маршрут, который показывает маршрут к желаемому месту назначения, указанному пользователем посредством операционного блока 13. Тем самым пользователю представляются текущее положение, карта окружающей области и предлагаемый маршрут.
Помимо этого ПНУ 1 переключается между режимом в транспортном средстве, в котором процесс навигации выполняется, когда ПНУ 1 прикреплен к транспортному средству 9, и пешеходным режимом, в котором процесс навигации выполняется, когда ПНУ 1 отсоединен от транспортного средства 9 и переносится вручную пользователем, который перемещается пешком (это будет подробнее описано ниже).
Управляющий блок 11 функционирует также в качестве блока 17 обнаружения опоры. Этот блок 17 обнаружения опоры периодически (например, каждые три секунды) определяет, соединен ли электрически ПНУ 1 с опорой 3, и генерирует сигнал CTD обнаружения опоры, который представляет результат этого определения. Сигнал CTD обнаружения опоры подается в блок 29 управления работой.
Если блок 17 обнаружения опоры обнаруживает, что ПНУ 1 прикреплен к опоре 3, управляющий блок 11 переводит ПНУ 1 в режим в транспортном средстве.
1-4. Режим в транспортном средстве
В режиме в транспортном средстве управляющий блок 11 функционирует как блок 21 обработки GPS, блок 22 вычисления скорости, блок 23 вычисления угла, блок 24 вычисления высоты, блок 25 вычисления положения и навигационный блок 26.
Когда ПНУ 1 работает в режиме в транспортном средстве, ПНУ 1 выполняет процесс обработки GPS для нахождения текущего положения на основе сигналов GPS, если эти сигналы GPS можно принимать. Альтернативно ПНУ 1 выполняет автономный процесс определения положения для оценки текущего положения на основе значений обнаружения, полученных от датчиков, если сигналы GPS трудно принимать.
В процессе обработки GPS ПНУ 1 принимает сигналы GPS от множества спутников GPS через антенну ANT1 и передает сигналы GPS к блоку 21 обработки GPS в управляющем блоке 11.
Блок 21 обработки GPS получает данные NPD1 текущего положения путем точного определения текущего положения транспортного средства 9 на основе траекторных данных, полученных демодуляцией сигналов GPS, и данных расстояния между транспортным средством 9 и спутниками GPS и передает данные NPD1 текущего положения в навигационный блок 26.
Навигационный блок 26 считывает данные карты для области, включающей в себя текущее положение транспортного средства 9, из запоминающего блока 12 в соответствии с данными NPD1 текущего положения и генерирует изображение карты, включающее в себя текущее положение.
Навигационный блок 26 вычисляет ориентацию направления перемещения транспортного средства 9 на основе данных NPD1 текущего положения и генерирует изображение GC компаса, соответствующее этой ориентации.
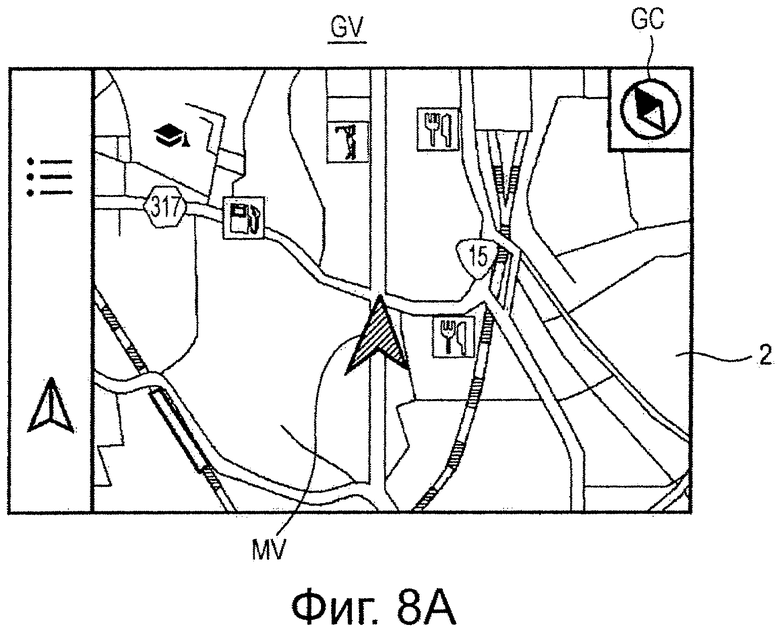
Навигационный блок 26 выводит изображение карты, включающее в себя текущее положение транспортного средства 9 и изображение GC компаса, в дисплейный блок 2. Дисплейный блок 2 воспроизводит навигационное изображение GV транспортного средства, показанное на фиг.8А, в котором изображение GC компаса наложено на изображение карты.
В навигационном изображении GV транспортного средства метка MV транспортного средства, имеющая форму стрелки, показана в текущем положении транспортного средства 9, а направление, в котором указывает эта стрелка, показывает направление перемещения транспортного средства 9. Навигационное изображение GV транспортного средства отображается на дисплейном блоке 2 в так называемом режиме навигации по направлению, в котором изображение карты поворачивается так, чтобы направление перемещения транспортного средства 9 постоянно указывало вверх на дисплейном блоке 2.
Помимо этого в навигационном изображении GV транспортного средства изображение GC компаса отображается в верхней правой части дисплейного блока 2. Это изображение GC компаса поворачивается в соответствии с изменением в ориентации направления перемещения транспортного средства 9.
Когда транспортное средство 9 находится, например, позади строения или в туннеле и прием сигналов GPS через антенну ANT I GPS затруднен, навигационному блоку 26 (фиг.7) трудно вычислять текущее положение транспортного средства 9, поскольку данные NPD1 текущего положения не подаются.
В таком случае блок 25 вычисления положения выполняет автономный процесс определения положения. В этом процессе скорость V вычисляется на основе ускорений, скорости тангажа и т.д., определенных датчиком 4 ускорения по трем осям, гироскопическим датчиком 5 по оси Y и т.д., а затем вычисляется текущее положение.
Конкретнее, датчик 4 ускорения по трем осям определяет ускорения αx, αy и αz с частотой дискретизации, например, 50 Гц и передает данные AD ускорения, представляющие ускорение αz, в блок 22 вычисления скорости в управляющем блоке 11.
Гироскопический датчик 5 по оси Y определяет скорость ωy тангажа с частотой дискретизации, например, 50 Гц и передает данные PD скорости тангажа, представляющие скорость ωy тангажа, в блок 22 вычисления скорости в управляющем блоке 11.
Блок 22 вычисления скорости вычисляет скорость V 50 раз в секунду по уравнению (1) на основе ускорения αz, соответствующего данным AD ускорения, поданным из датчика 4 ускорения по трем осям, и скорости ωy тангажа, соответствующей данным PD скорости тангажа, поданным из гироскопического датчика 5 по оси Y. Затем блок 22 вычисления скорости передает данные VD скорости, представляющие скорость V, в блок 25 вычисления положения.
Гироскопический датчик 6 по оси Z определяет скорость ωz рысканья с частотой дискретизации, например, 50 Гц и передает данные YD скорости рысканья, представляющие скорость ωz рысканья, в блок 23 вычисления угла в управляющем блоке 11.
Блок 23 вычисления угла вычисляет угол θ в то время, когда транспортное средство 9 поворачивает влево или вправо, путем умножения скорости ωz рысканья, соответствующей данным YD скорости рысканья, поданным из гироскопического датчика 6 по оси Z, на период дискретизации (0,02 с в данном случае). Блок 23 вычисления угла передает данные DD угла, представляющие угол θ в блок 25 вычисления положения.
Блок 25 вычисления положения определяет величину изменения между предыдущим положением Р0 и текущим положением Р1, показанным на фиг.6, на основе скорости V, соответствующей данным VD скорости, поданным из блока 22 вычисления скорости, и угла θ, соответствующего данным DD угла, поданным из блока 23 вычисления угла. Блок 25 вычисления положения вычисляет текущее положение Р1 добавлением величины изменения к предыдущему положению Р0 и передает данные NPD2 текущего положения, представляющие текущее положение Р1, в навигационный блок 26.
Датчик 7 атмосферного давления определяет давление PR окружающей атмосферы с частотой дискретизации, например, 50 Гц и передает данные PRD атмосферного давления, представляющие атмосферное давление PR, в блок 24 вычисления высоты.
Блок 24 вычисления высоты вычисляет высоту транспортного средства 9 на основе атмосферного давления PR, соответствующего данным PRD атмосферного давления, поданным из датчика 7 атмосферного давления, и передает данные HD высоты, представляющие высоту, в навигационный блок 26.
Навигационный блок 26 считывает данные карты для области, включающей в себя текущее положение транспортного средства 9, из запоминающего блока 12 в соответствии с данными NPD2 текущего положения, поданными из блока 26 вычисления положения, и данными HD высоты, поданными из блока 24 вычисления высоты, и генерирует изображение карты, включающее в себя текущее положение.
Навигационный блок 26 вычисляет ориентацию направления перемещения транспортного средства 9 на основе данных NPD2 текущего положения и генерирует соответствующее этой ориентации изображение GC компаса.
Навигационный блок 26 выводит изображение карты, включающее в себя текущее положение транспортного средства 9 и изображение GC компаса в дисплейный блок 2. Дисплейный блок 2 воспроизводит навигационное изображение GV, показанное на фиг.8А, в котором изображение GC компаса наложено на изображение карты.
Таким образом, в режиме в транспортном средстве ПНУ 1 вычисляет ориентацию на основе данных NPD1 текущего положения или данных NPD2 текущего положения и воспроизводит изображение карты на дисплейном блоке 2 вместе с изображением GC компаса в соответствии с вычисленной ориентацией.
1-4-1. Процесс вычисления скорости
Теперь будет описан процесс вычисления скорости для вычисления скорости V. Скорость V вычисляется блоком 22 вычисления скорости на основе ускорения αz, соответствующего данным AD ускорения, поданным из датчика 4 ускорения по трем осям, и скорости ωy тангажа, соответствующей данным PD скорости тангажа, поданным из гироскопического датчика 5 по оси Y.
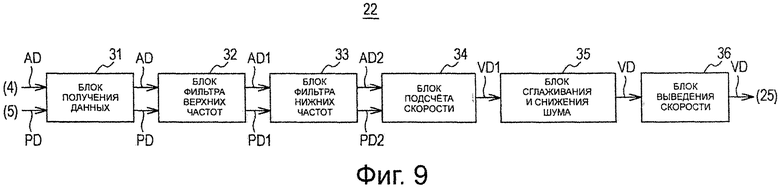
В процессе вычисления скорости, как иллюстрируется на фиг.9, блок 22 вычисления скорости функционирует как блок 31 получения данных, блок 32 фильтра верхних частот, блок 33 фильтра нижних частот, блок 34 подсчета скорости, блок 35 сглаживания и снижения шума и блок 36 выведения скорости.
Блок 31 получения данных в блоке 22 вычисления скорости получает данные AD ускорения, поданные из датчика 4 ускорения по трем осям, и данные PD скорости тангажа, поданные из гироскопического датчика 5 по оси Y, и передает данные AD ускорения и данные PD скорости тангажа в блок 32 фильтра верхних частот.
Блок 32 фильтра верхних частот удаляет линейные составляющие данных AD ускорения и данных PD скорости тангажа, поданных их блока 31 получения данных, и получает в результате данные AD1 ускорения и данные PD1 скорости тангажа. Блок 32 фильтра верхних частот передает эти данные AD1 ускорения и данные PD1 скорости тангажа в блок 33 фильтра нижних частот.
Блок 33 фильтра нижних частот подвергает данные AD1 ускорения и данные PD1 скорости тангажа, поданные из блока 32 фильтра верхних частот, процессу низкочастотной фильтрации и получает в результате данные AD2 ускорения и данные PD2 скорости тангажа. Блок 33 фильтра нижних частот передает эти данные AD2 ускорения и данные PD2 скорости тангажа в блок 34 подсчета скорости.
Блок 34 подсчета скорости выполняет процесс подсчета скорости, который будет описан ниже, с помощью данных AD2 ускорения и данных PD2 скорости тангажа, поданных из блока 33 фильтра нижних частот, и получает в результате данные VD1 скорости. Блок 34 подсчета скорости передает эти данные VD1 скорости в блок 35 сглаживания и снижения шума.
Блок 35 сглаживания и снижения шума снижает ошибку, включенную в скорость V, подвергая данные VD1 скорости, поданные из блока 34 подсчета скорости, заранее заданному процессу сглаживания и снижения шума, и получает в результате данные VD скорости. Блок 35 сглаживания и снижения шума передает эти данные VD скорости в блок 36 выведения скорости.
Блок 36 выведения скорости выводит данные VD скорости, поданные из блока 35 сглаживания и снижения шума, в блок 25 вычисления положения в качестве данных, которые представляют скорость V транспортного средства 9.
Вышеописанным образом блок 22 вычисления скорости вычисляет скорость V транспортного средства 9 на основе данных AD ускорения, поданных из датчика 4 ускорения по трем осям, и данных PD скорости тангажа, поданных из гироскопического датчика 5 по оси Y.
1-4-1-1. Процесс низкочастотной фильтрации
Будет описан процесс низкочастотной фильтрации, выполняемый блоком 33 фильтра нижних частот для данных AD1 ускорения и данных PD1 скорости тангажа, поданных из блока 32 фильтра верхних частот.
Здесь высота Н измерялась на основе атмосферного давления PR, соответствующего данным PRD атмосферного давления, поданных из датчика 7 атмосферного давления (фиг.7), а угол ϕ вокруг оси Y по отношению к горизонтальному направлению измерялся на основе скорости ωz тангажа, соответствующей данным PD скорости тангажа, поданным из гироскопического датчика 5 по оси Y.
Результат этих измерений показывал, что когда высота Н внезапно уменьшается, т.е. когда транспортное средство 9 съезжает по склону вниз, угол ϕ также уменьшается. Как ясно из этого результата, существует корреляция между высотой и углом ϕ.
Таким образом, когда высота Н изменяется, угол ϕ также изменяется в соответствии с изменением в высоте Н. Поэтому ПНУ 1 способно обнаруживать неровность дороги вдоль направления перемещения транспортного средства 9 гироскопическим датчиком 5 по оси Y.
Помимо этого измеренный угол ϕ флюктуировал один или два раза в секунду независимо от скорости транспортного средства 9. Поэтому обнаружено, что когда ПНУ 1 определяет скорость ωy тангажа, соответствующую данным PD скорости тангажа, полученным гироскопическим датчиком 5 по оси Y, найденная скорость ωy тангажа флюктуирует с частотой 1-2 Гц независимо от скорости перемещения транспортного средства 9.
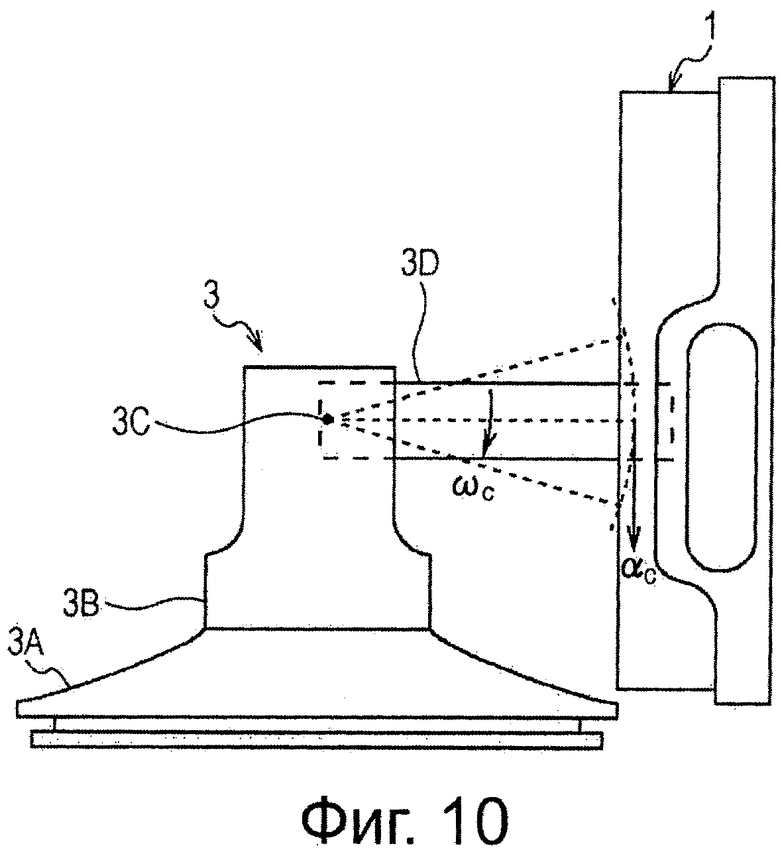
ПНУ 1 поддерживается опорой 3, которая прикреплена к приборному щитку транспортного средства 9 присоской 3А. Как иллюстрируется на фиг.10, опора 3 включает в себя основной корпус 3В опоры, предусмотренный на присоске 3А, и поддерживающую ПНУ часть 3D. Поддерживающая ПНУ часть 3D поддерживается на одном своем конце штативом 3С, предусмотренным на основном корпусе 3В опоры на заранее заданной высоте, и поддерживает ПНУ 1 на другом своем конце.
Поэтому когда транспортное средство 9 качается в соответствии с неровностью дороги, ПНУ 1 также качается по вертикали вокруг штатива 3С поддерживающей ПНУ части 3D, например, с ускорением αс и угловой скоростью ωс.
Экспериментально подтверждено, что гироскопический датчик 5 по оси Y в ПНУ 1 определяет полную угловую скорость ωcy, полученную как сумма скорости ωy тангажа, которая флюктуирует с частотой 1-2 Гц в соответствии с неровностью дороги, как описано выше, и угловую скорость ωc, которая флюктуирует с частотой примерно 15 Гц из-за опоры 3.
Было также подтверждено, что датчик 4 ускорения по трем осям в ПНУ 1 определяет полное ускорение αcz, полученное как сумма ускорения αz, которое флюктуирует с частотой 1-2 Гц в соответствии с неровностью дороги, как описано выше, и ускорения αc, которое флюктуирует с частотой примерно 15 Гц из-за опоры 3.
Поэтому блок 33 фильтра нижних частот (фиг.9) подвергает данные AD1 ускорения и данные PD1 скорости тангажа, поданные из блока 32 фильтра верхних частот, процессу низкочастотной фильтрации для удаления частотных составляющих примерно 15 Гц, то есть ускорения αc и угловой скорости ωc, генерируемых вследствие того, что ПНУ 1 удерживается опорой 3.
Соответственно, блок 33 фильтра нижних частот выделяет только ускорение αz, создаваемое неровностью дороги за счет удаления ускорение αc из полного ускорения αcz. Помимо этого блок 33 фильтра нижних частот выделяет только скорость ωy тангажа, создаваемую неровностью дороги за счет удаления угловой скорости ωc из полной угловой скорости ωcy.
1-4-1-2. Процесс подсчета скорости
Теперь будет описан процесс подсчета скорости, в котором блок 41 подсчета скорости подсчитывает скорость V на основе данных AD2 ускорения и данных PD2 скорости тангажа, поданных из блока 33 фильтра нижних частот.
В общем, ПНУ 1 может быть установлено в транспортном средстве 9 в различных положениях. Например, ПНУ 1 может быть установлено на приборном щитке в передней части транспортного средства 9 или рядом с задним стеклом в задней части транспортного средства 9.
Хотя здесь будут опущены подробности, экспериментально было подтверждено, что фаза ускорения αz, определенного ПНУ 1, когда ПНУ 1 установлено в задней части транспортного средства 9, отстает от фазы ускорения αz, определенного ПНУ 1, когда ПНУ 1 установлено в передней части транспортного средства 9. Поэтому ПНУ 1 использует данные AD2 ускорения и данные PD2 скорости тангажа в некоторых пределах.
Когда скорость V транспортного средства 9 низкая, ускорение αz и скорость ωy тангажа резко изменяются в соответствии с малыми изменениями в дороге. Поэтому для соответствия этим резким изменениям блок 34 подсчета скорости устанавливает пределы подлежащих использованию данных на 25 точек данных, т.е. на узкие пределы.
Когда скорость V транспортного средства 9 высокая, велико влияние подвески транспортного средства 9, и ускорение αz и скорость ωy тангажа изменяются медленно. Поэтому для соответствия этим медленным изменениям блок 34 подсчета скорости устанавливает пределы подлежащих использованию данных на 75 точек данных, т.е. на широкие пределы.
Конкретнее, со ссылкой на фиг.11, блок 34 подсчета скорости выделяет максимальное значение и минимальное значение ускорения αz, соответствующего данным AD2 ускорения, поданным из блока 33 фильтра нижних частот, как максимальное ускорение αz,max и минимальное ускорение αz,min соответственно из пределов, включающих в себя 25 или 75 точек данных, центрированных на точке Pm данных, соответствующей предыдущему положению Р0 (фиг.6).
Помимо этого блок 34 подсчета скорости выделяет максимальное значение и минимальное значение скорости ωy тангажа, соответствующей данным PD2 скорости тангажа, поданным из блока 33 фильтра нижних частот, как максимальную скорость ωy,max тангажа и минимальную скорость ωy,min тангажа соответственно из пределов, включающих в себя 25 или 75 точек данных, центрированных на точке Pm данных.
Таким образом, блок 34 подсчета скорости выделяет максимальное ускорение αz,max, минимальное ускорение αz,min, максимальную скорость ωz,max тангажа и минимальную скорость ωy,min тангажа из пределов более широких, нежели фазовый сдвиг, который может происходить в ускорении αz и скорости ωy тангажа.
Затем блок 34 подсчета скорости вычисляет скорость V в направлении перемещения в предыдущем положении Р0 (фиг.6) на основе максимального ускорения αz,max и минимального ускорения αz,min, выделенных из данных AD2 ускорения, и максимальной скорости ωy,max тангажа и минимальной скорости ωy,min тангажа, выделенных из данных PD2 скорости тангажа, с помощью следующего уравнения (3), которое получено преобразованием уравнения (1):

Затем блок 34 подсчета скорости передает данные VD1 скорости, представляющие скорость V, в блок 35 сглаживания и снижения шума.
Таким образом, даже когда имеется фазовый сдвиг в ускорении αz и скорости ωy тангажа, блок 34 подсчета скорости может вычислять скорость V без влияния фазового сдвига за счет использования уравнения (3).
Как описано выше, блок 34 подсчета скорости переключает пределы, из которых выделяются максимальное ускорение αz,max, минимальное ускорение αz,min, максимальная скорость ωy,max тангажа и минимальная скорость ωy,min тангажа, в соответствии со скоростью V транспортного средства 9. Поэтому условия дороги и транспортного средства 9 могут быть отражены в соответствии со скоростью V, и точность вычисления скорости V можно увеличить.
1-4-2. Процедура процесса вычисления положения на основе процесса вычисления скорости
Теперь со ссылкой на блок-схему алгоритма, показанную на фиг.12, будет описана процедура процесса вычисления положения, в которой управляющий блок 11 в ПНУ 1 вычисляет текущее положение на основе вышеописанного процесса вычисления скорости.
Управляющий блок 11 начинает с начального этапа программы RT1 и переходит к этапу SP1, где блок 31 получения данных в блоке 22 вычисления скорости получает данные AD ускорения, определенные датчиком 4 ускорения по трем осям, и данные PD скорости тангажа, определенные гироскопическим датчиком 5 по оси Y. Затем управляющий блок 11 переходит к этапу SP2.
На этапе SP2 управляющий блок 11 заставляет блок 32 фильтра верхних частот в блоке 22 вычисления скорости выполнять процесс высокочастотной фильтрации для данных AD ускорения и данных PD скорости тангажа и переходит к этапу SP3.
На этапе SP3 управляющий блок 11 заставляет блок 33 фильтра нижних частот в блоке 22 вычисления скорости выполнять процесс низкочастотной фильтрации, например обработку фильтром БИХ (бесконечной импульсной характеристики) четвертого порядка с частотой отсечки 1 Гц для данных AD1 ускорения и данных PD1 скорости тангажа, полученных как результат процесса высокочастотной фильтрации, и переходит к этапу SP4.
На этапе SP4 управляющий блок 11 заставляет блок 34 подсчета скорости в блоке 22 вычисления скорости вычислять скорость V по уравнению (3) на основе ускорения αz и скорости ωy тангажа, соответствующих данным AD2 ускорения и данным PD2 скорости тангажа соответственно, полученных как результат процесса низкочастотной фильтрации. Затем управляющий блок 11 переходит к этапу SP5.
На этапе SP5 управляющий блок 11 подвергает данные VD скорости, представляющие скорость V, вычисленную на этапе SP4, процессу сглаживания и снижения шума.
Конкретнее, управляющий блок 11 подвергает данные VD1 скорости, представляющие скорость V, вычисленную на этапе SP4, процессу низкочастотной фильтрации с переменной частотой отсечки и переходит к этапу SP6.
На этапе SP6 управляющий блок 11 заставляет блок 23 вычисления угла получать данные YD скорости рысканья, полученные гироскопическим датчиком 6 по оси Z, и переходит к этапу SP7.
На этапе SP7 управляющий блок 11 заставляет блок 23 вычисления угла получить угловые данные DD, представляющие угол θ, вычисленный умножением скорости αz рысканья, соответствующей данным YD скорости рысканья, на период дискретизации, который составляет 0,02 с. Затем управляющий блок 11 переходит к этапу SP8.
На этапе SP8 управляющий блок 11 вычисляет данные NPD2 текущего положения на основе данных VD скорости, полученных как результат процесса сглаживания и снижения шума, выполненного на этапе SP5, и угловых данных DD, полученных на этапе SP7. Затем управляющий блок 11 переходит к этапу SP9.
На этапе SP9 управляющий блок 11 считывает данные карты для области, включающей в себя текущее положение транспортного средства 9, из запоминающего блока 12 в соответствии с данными NPD2 текущего положения, поданными из блока 25 вычисления положения. Затем управляющий блок 11 генерирует изображение карты, включающее в себя текущее положение, выводит это изображение карты в дисплейный блок 2 и переходит к этапу SP10, где процесс завершается.
1-5. Пешеходный режим
Далее будет описан пешеходный режим, выбранный, когда ПНУ 1 отсоединено от транспортного средства 9. Управляющий блок 11 (фиг.7) переключает ПНУ 1 в пешеходный режим, если блок 17 обнаружения опоры определяет, что ПНУ 1 отсоединен от опоры 3.
В пешеходном режиме управляющий блок 11 функционирует не только как блок 21 обработки GPS и навигационный блок 26, как в режиме в транспортном средстве, но также как блок 27 определения пространственного положения и блок 28 вычисления ориентации.
Блок 27 определения пространственного положения получает данные AD3 ускорения, представляющие ускорения αx, αy и αz, из датчика 4 ускорения по трем осям. Вслед за этим блок 27 определения пространственного положения определяет угол АА пространственного положения, который показывает наклон ПНУ 1 по отношению к наземной плоскости на основе полученных данных AD3 ускорения, и подает данные AAD пространственного положения, представляющие угол АА пространственного положения, в блок 28 вычисления ориентации.
Помимо этого, как описано выше, ПНУ 1 снабжен геомагнитным датчиком 8, который может определять геомагнетизм по направлениям трех осей. Этот геомагнитный датчик 8 определяет геомагнетизм и подает геомагнитные данные TMD, представляющие геомагнитные значения М, соответствующие трехмерному геомагнитному вектору, в блок 28 вычисления ориентации.
Блок 28 вычисления ориентации вычисляет ориентацию С на основе геомагнитных значений М, соответствующих геомагнитным данным TMD, поданным из геомагнитного датчика 8, и угла АА пространственного положения, соответствующего данным АА пространственного положения, поданным из блока 27 определения пространственного положения. Затем блок 28 вычисления ориентации подает данные CD ориентации, представляющие ориентацию С, в навигационный блок 26.
Навигационный блок 26 считывает данные карты для области, включающей в себя текущее положение пользователя, который несет ПНУ 1, из запоминающего блока 12 в соответствии с данными NPD1 текущего положения, полученными блоком 21 обработки GPS, и генерирует изображение карты, включающее в себя текущее положение.
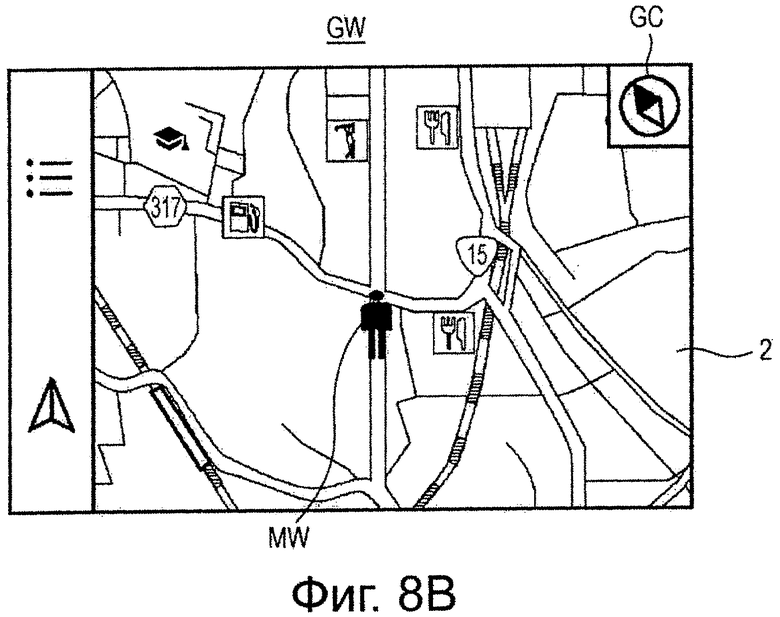
Навигационный блок 26 генерирует изображение GC компаса, соответствующее ориентации С, представленной данными CD ориентации. Навигационный блок 26 выводит изображение карты, включающее в себя текущее положение пользователя, и изображение GC компаса в дисплейный блок 2. Дисплейный блок 2 отображает пешеходное навигационное изображение GW, показанное на фиг.8В, в котором изображение GC компаса наложено на изображение карты.
В пешеходном навигационном изображении GW метка MW пользователя, имеющая форму человеческого тела, показана в текущем положении пользователя, а направление от ног к голове показывает направление перемещения пользователя. Аналогично навигационному изображению GV транспортного средства пешеходное навигационное изображение GW также отображается на дисплейном блоке 2 в режиме навигации по направлению.
Помимо этого аналогично навигационному изображению GV транспортного средства в пешеходном навигационном изображении GW изображение GC компаса воспроизводится в правой верхней части дисплейного блока 2. Это изображение GC компаса поворачивается в соответствии с изменением ориентации направления перемещения пользователя.
Как описано выше, блок 17 обнаружения опоры (фиг.7) периодически определяет, прикреплено ли ПНУ 1 к опоре 3. Блок 17 обнаружения опоры подает сигнал CTD обнаружения опоры, который представляет результат обнаружения, в блок 29 управления работой.
Блок 29 управления работой выполняет процесс управления работой для активации или деактивации геомагнитного датчика 8, блока 28 вычисления ориентации и блока 27 определения пространственного положения на основе сигнала CTD обнаружения опоры (это будет подробно описано ниже).
Благодаря характеристикам геомагнитного датчика 8 на этот геомагнитный датчик 8 влияет магнитное тело, сделанное из металла и/или тому подобного, размещенное вокруг геомагнитного датчика 8, или намагниченность металлических компонентов, таких как экранная пластина (не показано), размещенная в ПНУ 1. Поэтому геомагнитные данные TMD обычно включают в себя ошибку.
Соответственно, когда блок 27 вычисления ориентации в управляющем блоке 11 начинает принимать геомагнитные данные TMD, представляющие геомагнитные значения Мх, My и Mz, из геомагнитного датчика 8, выполняется заранее заданный процесс инициализации для установления корректирующего значения для исправления геомагнитных данных TMD и порог или тому подобное, который указывает пределы нормального значения (именуемые здесь обучающими значениями LN).
В процессе инициализации блок 28 вычисления ориентации отображает на дисплейном блоке 2 сообщение, говорящее, например, «переместите устройство восьмеркой», чтобы подсказать пользователю переместить весь корпус ПНУ 1 по траектории в форме цифры 8. Полученные в это время геомагнитные данные TMD используются для генерирования обучающих значений LN.
Вслед за этим блок 28 вычисления ориентации исправляет геомагнитные данные TMD, подвергая эти геомагнитные данные TMD заранее заданному процессу исправления с помощью корректирующего значения, полученного как обучающее значение LN, и генерирует данные CD ориентации на основе исправленных геомагнитных данных TMD.
Намагниченность металлических компонентов или тому подобного, предусмотренная в ПНУ 1, может изменяться, когда пользователь, который несет ПНУ 1, проходит через область, где существует сильное магнитное поле. Такое изменение намагниченности влияет на геомагнитные данные TMD.
Поэтому блок 28 вычисления ориентации определяет, находятся ли геомагнитные данные TMD, полученные из геомагнитного датчика 8, в нормальных пределах, на основе обучающего значения LN и генерирует данные CD ориентации, основанные на геомагнитных данных TMD, только когда эти геомагнитные данные TMD находятся в нормальных пределах.
Если геомагнитные данные TMD, полученные из геомагнитного датчика 8, не находятся в нормальных пределах, блок 28 вычисления ориентации соответственно обновляет обучающие значения LN, в том числе корректирующее значение и порог, на основе геомагнитных данных TMD.
1-5-1. Процесс вычисления ориентации
Далее будет описан процесс вычисления ориентации. В этом процессе вычисления ориентации блок 28 вычисления ориентации вычисляет ориентацию С на основе геомагнитных значений М, соответствующих геомагнитным данным TMD, поданным из геомагнитного датчика 8, и угла АА пространственного положения, соответствующего данным AAD пространственного положения, поданным из блока 27 определения пространственного положения.
Здесь, земная система координат определяется так, что положительное направление земной оси Х является направлением на север по наземной плоскости, положительное направление земной оси Y является направлением на восток по наземной плоскости, а положительное направление земной оси Z является направлением силы тяжести.
Помимо этого углы наклона ПНУ 1 вокруг земной оси Х и земной оси Y по отношению к наземной плоскости (т.е. плоскости, включающей в себя земную ось Х и земную ось Y) определяются как угол А крена и угол В тангажа соответственно.
Датчик 4 ускорения по трем осям определяет ускорения αх, αy и αz и передает данные AD3 ускорения, представляющие эти ускорения αx, αy и αz, в блок 27 определения пространственного положения в управляющем блоке 11.
Блок 27 определения пространственного положения определяет угол АА пространственного положения, в том числе угол А крена и угол В тангажа, на основе ускорений αx, αy и αz, соответствующих данным AD ускорения, поданным из датчика 4 ускорения по трем осям, и подает данные AAD пространственного положения, представляющие угол АА пространственного положения, в блок 28 вычисления ориентации.
Блок 28 вычисления ориентации выполняет вычисление коррекции наклона для исключения влияния наклона ПНУ 1 по отношению к наземной плоскости из геомагнитных значений М, соответствующих геомагнитным данным TMD, поданных из геомагнитного датчика 8. Это вычисление коррекции наклона выполняется с помощью угла АА пространственного положения, соответствующего данным AAD пространственного положения, поданным из блока 27 вычисления пространственного положения.
Теперь будет описано вычисление коррекции наклона. На фиг.13 предполагается, что ПНУ 1 (не показано) повернуто на угол А крена вокруг земной оси Х и на угол В тангажа вокруг земной оси Y из состояния, в котором ПНУ 1 расположено параллельно наземной плоскости, так что ось Х ПНУ 1 проходит вдоль земной оси X.
Блок 28 вычисления ориентации (фиг.7) вычисляет геомагнитные значения МЕх, МЕу и MEz в состоянии, в котором ПНУ 1 расположено параллельно наземной плоскости, так что ось Х ПНУ 1 проходит вдоль земной оси X. Геомагнитные значения МЕх, МЕу и MEz в вычисляются по следующему уравнению (4) из геомагнитных значений МЕх, МЕу и MEz, которые определяют трехмерный геомагнитный вектор и которые подаются из геомагнитного датчика 8:

Затем блок 28 вычисления ориентации вычисляет ориентацию С ПНУ 1 по приведенному ниже уравнению (5). В уравнении (5) пределы функции arcos составляют от 0 до 180 градусов. Далее, блок 28 вычисления ориентации подает данные CD ориентации, представляющие ориентацию С, вычисленную по уравнению (5), в навигационный блок


Таким образом, блок 28 вычисления ориентации вычисляет ориентацию С на основе геомагнитных значений М, соответствующих геомагнитным данным TMD, поданным из геомагнитного датчика 8, и угла АА пространственного положения, соответствующего данным AAD пространственного положения, поданным из блока 27 определения пространственного положения.
1-6. Процесс управления работой
Как описано выше, когда ПНУ 1 установлено в транспортном средстве 9, геомагнитный датчик 8 работает непрерывно, даже если для геомагнитного датчика 8 трудно определять геомагнитные значения М, представляющие точную ориентацию. Поэтому имеется возможность, что электрическая мощность для работы геомагнитного датчика 8 будет теряться.
Соответственно, блок 29 управления работой (фиг.7) получает сигнал CTD обнаружения опоры, указывающий, прикреплено ли ПНУ 1 к опоре 3, из блока 17 обнаружения опоры.
Когда ПНУ 1 прикреплено к опоре 3, предполагается, что ПНУ 1 прикреплено к транспортному средству 9. В этом случае геомагнитному датчику 8 трудно определять геомагнитные значения М, представляющие точную ориентацию. Поэтому блок 29 управления работой деактивирует геомагнитный датчик 8.
Соответственно, ПНУ 1 предохраняется от потребления электрической мощности для работы геомагнитного датчика 8.
Помимо этого в данном случае геомагнитные данные TMD не подаются в блок 28 вычисления ориентации из геомагнитного датчика 8. Поэтому блок 29 управления работой деактивирует также блок 28 вычисления ориентации и блок 27 определения пространственного положения, который подает данные AAD пространственного положения в блок 28 вычисления ориентации.
Соответственно, ПНУ 1 может снизить программную нагрузку, прикладываемую, когда работают блок 28 вычисления ориентации и блок 27 определения пространственного положения. В результате ПНУ 1 предохраняется от потребления электрической мощности для работы блока 28 вычисления ориентации и блока 27 определения пространственного положения.
Таким образом, когда ПНУ 1 прикреплено к опоре 3, ПНУ 1 заставляет блок 29 управления работой деактивировать геомагнитный датчик 8, блок вычисления ориентации и блок 27 определения пространственного положения.
Хотя деактивация геомагнитного датчика 8, блока 28 вычисления ориентации и блока 27 определения пространственного положения представляет собой одну возможность снизить программную нагрузку, когда определено, что ПНУ 1 прикреплено к опоре 3, возможны и различные другие реализации.
Например, блок 29 управления работой может деактивировать только блок 28 вычисления ориентации, сохраняя геомагнитный датчик 8 и блок 27 определения пространственного положения в активном состоянии. Блок 29 управления работой может также поддерживать блок 28 вычисления ориентации активным, но управлять блоком 28 вычисления ориентации, чтобы он не вычислял ориентацию, тем самым эффективно игнорируя сигналы, принимаемые от геомагнитного датчика 8 и блока 27 определения пространственного положения. Блок 29 управления работой может также деактивировать один или несколько из геомагнитного датчика 8, блока 28 вычисления ориентации и блока 27 определения пространственного положения, чтобы снизить программную нагрузку, когда определено, что ПНУ 1 прикреплено к опоре 3.
Результат деактивации любого из геомагнитного датчика 8, блока 28 вычисления ориентации и(или) блока 27 определения пространственного положения, либо управление блоком 28 вычисления ориентации, чтобы он игнорировал сигналы, принимаемые или из геомагнитного датчика 8, или из блока 27 определения пространственного положения, состоит в управлении блоком 28 вычисления ориентации не вычислять ориентацию ПНУ 1.
Когда ПНУ 1 не прикреплено к опоре 3, предполагается, что ПНУ 1 не прикреплено к транспортному средству 9. В этом случае геомагнитный датчик 8 может определять геомагнитные значения М, представляющие точную ориентацию. Поэтому блок 29 управления работой активирует геомагнитный датчик 8, блок 28 вычисления ориентации и блок 27 определения пространственного положения.
Таким образом, ПНУ 1 заставляет блок 17 обнаружения опоры определять, прикреплено ли ПНУ 1 к опоре 3. Если ПНУ 1 отделено от опоры 3, то есть если ПНУ 1 отсоединено от транспортного средства 9, геомагнитный датчик 8, блок 28 вычисления ориентации и блок 27 определения пространственного положения активируются.
Если ПНУ 1 прикреплено к транспортному средству 9 и трудно определять геомагнитные значения М, представляющие точную ориентацию, ПНУ 1 деактивирует геомагнитный датчик 8.
Далее будет описана процедура процесса управления работой со ссылкой на блок-схему алгоритма по фиг.14. В процессе управления работой управляющий блок 11 в ПНУ 1 активирует или деактивирует геомагнитный датчик 8, блок 28 вычисления ориентации и блок 27 определения пространственного положения в соответствии с тем, установлено ли ПНУ 1 на транспортном средстве 9.
Когда питание ПНУ 1 включено, управляющий блок 11 начинает с начального этапа программы PR2 и переходит к этапу SP21, где выключается флаг завершения инициализации, который указывает, завершена ли инициализация обучающих значений LN. Затем управляющий блок 11 переходит к этапу SP22.
На этапе SP22 управляющий блок 11 определяет, прикреплено ли ПНУ 1 к опоре 3, на основе результата определения, выполненного блоком 17 обнаружения опоры. Если результатом этого определения является НЕТ, это означает, что ПНУ 1 переносится вне транспортного средства 9 и что должны генерироваться данные CD ориентации. В этом случае управляющий блок 11 переходит к этапу SP23.
На этапе SP23 управляющий блок 11 определяет, завершен ли процесс инициализации, на основе состояния флага завершения инициализации. Если результатом этого определения является НЕТ, это означает, что процесс инициализации еще не завершен. В этом случае управляющий блок 11 переходит к этапу SP24.
На этапе SP24 управляющий блок 11 заставляет блок 29 управления работой начать работу геомагнитного датчика 8, блока 28 вычисления ориентации и блока 27 определения пространственного положения и заставляет блок 28 вычисления ориентации выполнять процесс инициализации для получения обучающих значений LN. Затем управляющий блок 11 включает флаг завершения инициализации и переходит к этапу SP25.
Конкретнее, когда состояние выключенного питания переключается в состояние включенного питания, а процесс инициализации еще не выполнен, управляющий блок 11 выполняет процесс инициализации для получения обучающих значений LN на этапе SP24.
Если результатом определения, выполненного на этапе SP23, является ДА, это означает, что процесс инициализации выполнять не нужно. В этом случае управляющий блок 11 переходит к этапу SP25.
На этапе SP25 управляющий блок 11 управляет работой ПНУ 1 в пешеходном режиме и отображает пешеходное навигационное изображение GW, показанное на фиг.8В, на дисплейном блоке 2. Затем управляющий блок 11 переходит к этапу SP28.
Если результатом определения, выполненного на этапе SP22, является ДА, это означает, что ПНУ 1 установлено в транспортном средстве 9 и трудно генерировать данные CD ориентации, представляющие правильную ориентацию. В этом случае управляющий блок 11 переходит к этапу SP26.
На этапе SP26 управляющий блок 11 заставляет блок 29 управления работой деактивировать геомагнитный датчик 8, блок 28 вычисления ориентации и блок 27 определения пространственного положения и выключает флаг завершения инициализации. Затем управляющий блок 11 переходит к этапу SP27.
Если геомагнитный датчик 8, блок 28 вычисления ориентации и блок 27 определения пространственного положения уже деактивированы, управляющий блок 11 поддерживает это состояние. Помимо этого, если флаг завершения инициализации уже выключен, управляющий блок 11 поддерживает это состояние.
На этапе SP27 управляющий блок 11 управляет работой ПНУ 1 в режиме в транспортном средстве и отображает навигационное изображение GV, показанное на фиг.8А, на дисплейном блоке 2. Затем управляющий блок 11 переходит к этапу SP28.
На этапе SP28 управляющий блок 11 ожидает заранее заданный период времени, а затем возвращается к этапу SP22 и повторяет вышеприведенные этапы.
Если питание ПНУ 1 выключено, управляющий блок 11 завершает программу RT2 процесса управления работой.
1-7. Работа и результат
В вышеописанной структуре ПНУ 1 снабжен геомагнитным датчиком 8, который определяет значения М геомагнетизма, приложенного к ПНУ 1, и блоком 17 обнаружения опоры, который определяет, прикреплено ли ПНУ 1 к опоре 3.
Когда ПНУ 1 прикреплено к опоре 3, предполагается, что ПНУ 1 прикреплено к транспортному средству 9. Поэтому ПНУ 1 работает в режиме в транспортном средстве.
В этом случае геомагнитному датчику 8 трудно определять геомагнитные значения М, представляющие точную ориентацию. Поэтому блок 29 управления работой деактивирует геомагнитный датчик 8. Соответственно, ПНУ 1 предохраняется от потребления электрической мощности для работы геомагнитного датчика 8.
Помимо этого блок 29 управления работой также деактивирует блок 28 вычисления ориентации и блок 27 определения пространственного положения, который подает данные AAD пространственного положения в блок 28 вычисления ориентации.
Соответственно, ПНУ 1 может снизить программную нагрузку, прикладываемую, когда работают блок 28 вычисления ориентации и блок 27 определения пространственного положения. В результате ПНУ 1 предохраняется от потребления электрической мощности для работы блока 28 вычисления ориентации и блока 27 определения пространственного положения. Таким образом, ПНУ 1 может еще более снизить потребление электрической мощности самого ПНУ 1.
Когда ПНУ 1 не прикреплено к опоре 3, предполагается, что ПНУ 1 не прикреплено к транспортному средству 9 и переносится пользователем. Соответственно, ПНУ 1 работает в пешеходном режиме.
В этом случае геомагнитный датчик 8 может определять геомагнитные значения М, представляющие точную ориентацию. Поэтому блок 29 управления работой активирует геомагнитный датчик 8.
В пешеходном режиме ПНУ 1 вычисляет ориентацию С на основе геомагнитных данных TMD, поданных из геомагнитного датчика 8, и воспроизводит изображение GC компаса на дисплейном блоке 2 на основе вычисленной ориентации С.
В режиме в транспортном средстве ПНУ 1 вычисляет ориентацию на основе данных NPD1 текущего положения и данных NPD2 текущего положения и воспроизводит изображение GC компаса на дисплейном блоке 2 на основе вычисленной ориентации.
Таким образом, ПНУ 1 воспроизводит изображение GC компаса для представления ориентации пользователю либо в режиме в транспортном средстве, либо в пешеходном режиме.
ПНУ 1 автоматически переключается между режимом в транспортном средстве и пешеходным режимом в соответствии с тем, удалено ли ПНУ 1 с опоры 3. Поэтому пользователю не нужно выполнять утомительную операцию переключения между этими двумя режимами.
В вышеприведенной структуре ПНУ 1 снабжено геомагнитным датчиком 8, который определяет значения М геомагнетизма, приложенного к ПНУ 1, и блоком 17 обнаружения опоры, который определяет, прикреплено ли ПНУ 1 к опоре 3. Когда ПНУ 1 прикреплено к опоре 3, блок 29 управления работой деактивирует геомагнитный датчик 8, блок 28 вычисления ориентации и блок 27 определения пространственного положения. Когда же ПНУ 1 не прикреплено к опоре 3, блок 29 управления работой активирует геомагнитный датчик 8, блок 28 вычисления ориентации и блок 27 определения пространственного положения. Таким образом, ПНУ 1 активирует геомагнитный датчик 8, когда ПНУ 1 отсоединено от транспортного средства 9, и деактивирует геомагнитный датчик 8, когда ПНУ 1 прикреплено к транспортному средству 9, когда трудно определять геомагнитные значения М, представляющие точную ориентацию.
2. Второй вариант осуществления
Фиг.15 иллюстрирует мобильное телефонное устройство 101 согласно второму варианту осуществления. Как и ПНУ 1 согласно первому варианту осуществления, это мобильное телефонное устройство 101 имеет навигационную функцию.
Как иллюстрируется на фиг.15, мобильное телефонное устройство 101 снабжено дисплейным блоком 102, состоящим из жидкокристаллического дисплея (ЖКД) (LCD) на передней стороне мобильного телефонного устройства 101. На этом дисплейном блоке 102 могут воспроизводиться изображение карты, электронная почта и т.п., соответствующие данным, хранящимся, например, в энергонезависимой памяти (не показано), установленной в мобильном телефонном устройстве 101.
Операционный блок 106, включающий в себя кнопки ввода, микрофон 104 и громкоговоритель 105, предусмотрены на передней стороне мобильного телефонного устройства 101.
Как и ПНУ 1 согласно первому варианту осуществления, мобильное телефонное устройство 101 может прикрепляться к транспортному средству 9 опорой 103.
Как иллюстрируется на фиг.16, мобильное телефонное устройство 101 включает в себя интегрированный управляющий блок 109, состоящий из ЦП. Этот интегрированный управляющий блок 109 управляет мобильным телефонным блоком 110, который обеспечивает функции в качестве мобильного телефонного устройства.
Мобильное телефонное устройство 101 включает в себя навигационный блок аналогично навигационному блоку 10, показанному на фиг.7, который обеспечивает навигационную функцию в вышеописанном ПНУ 1, и навигационный блок 10 управляется интегрированным управляющим блоком 109. Структура этого навигационного блока аналогична структуре навигационного блока 10, показанного на фиг.7, и его пояснения поэтому опущены.
Мобильный телефонный блок 110 включает в себя блок 114 управления мобильным телефоном, состоящий из ЦП. Блок 114 управления мобильным телефоном управляет всей работой мобильного телефонного блока 110 с помощью базисной программы, считанной из запоминающего блока 108, такого как энергонезависимая память.
Мобильный телефонный блок 110 соединен с дисплейным блоком 102 и операционным блоком 106, а также соединен с запоминающим блоком 108, состоящим из полупроводниковой памяти или тому подобного и используемым для хранения различных данных. Хотя это и не показано на фиг.16, дисплейный блок 102, операционный блок 106 и запоминающий блок 108 соединены также с навигационным блоком 10.
Мобильное телефонное устройство 101 использует мобильный телефонный блок 110 для обеспечения связной функции для передачи и приема электронной почты и телефонной функции. Мобильный телефонный блок 110 в мобильном телефонном устройстве 101 принимает сигналы от базовой станции (не показано) через антенну ANT2 и передает принятые сигналы в блок 111 передачи и приема.
Блок 111 передачи и приема включает в себя передающую секцию и приемную секцию. Блок 111 передачи и приема демодулирует, например, принятые сигналы посредством заранее заданного способа для преобразования этих сигналов в принятые данные и передает принятые данные в декодер 112. Декодер 112 восстанавливает данные речи лица на другом конце путем декодирования принятых данных под управлением блока 114 управления мобильным телефоном и выводит восстановленные данные в громкоговоритель 105. Громкоговоритель 105 выводит речь лица на другом конце на основе речевых данных.
Помимо этого мобильный телефонный блок 110 собирает речевые сигналы через микрофон 104 и передает собранные речевые сигналы в кодер 115. Кодер 115 преобразует эти речевые сигналы в цифровые данные под управлением блока 114 управления мобильным телефоном, а затем кодирует цифровые данные заранее заданным способом для генерирования речевых данных. Кодер 115 выводит эти речевые данные в блок 111 передачи и приема.
Блок 111 передачи и приема модулирует речевые данные заранее заданным способом и передает модулированные речевые данные к базовой станции (не показано) по радио через антенну ANT2.
В это время блок 114 управления мобильным телефоном в мобильном телефонном блоке 110 отображает телефонный номер лица на другом конце, статус приема радиоволн и т.п. на дисплейном блоке 102 в соответствии с рабочими командами, вводимыми через операционный блок 104.
Помимо этого, когда электронная почта принимается связной функцией, блок 114 управления мобильным телефоном в мобильном телефонном блоке 110 подает принятые данные в декодер 112 через блок 111 передачи и приема. Декодер 112 декодирует принятые данные для восстановления данных электронной почты и выводит восстановленные данные электронной почты в дисплейный блок 102. Электронная почта отображается на дисплейном блоке 102 и сохраняется в запоминающем блоке 108.
Помимо этого, когда электронная почта передается связной функцией, блок 114 управления мобильным телефоном в мобильном телефонном блоке 110 заставляет кодер 115 кодировать данные электронной почты, вводимые через операционный блок 106. Кодированные данные электронной почты передаются через блок 111 передачи и приема и антенну ANT2 по радио.
Когда мобильное телефонное устройство 101 выполняет навигационную функцию, интегрированный управляющий блок 109 управляет навигационным блоком 10 так, что он выполняет вышеописанную процедуру процесса управления ориентацией (фиг.14).
Конкретнее, мобильное телефонное устройство 101 снабжено геомагнитным датчиком 8 (фиг.7), который определяет значения М геомагнетизма, приложенного к мобильному телефонному устройству 101, и блоком 17 обнаружения опоры (фиг.7), который определяет, прикреплено ли мобильное телефонное устройство 101 к опоре 103.
Когда мобильное телефонное устройство 101 прикреплено к опоре 103, предполагается, что мобильное телефонное устройство 101 прикреплено к транспортному средству 9. Поэтому мобильное телефонное устройство 101 работает в режиме в транспортном средстве.
В этом случае геомагнитному датчику 8 трудно определять геомагнитные значения М, представляющие точную ориентацию. Поэтому блок 29 управления работой деактивирует геомагнитный датчик 8. Соответственно, мобильное телефонное устройство 101 предохраняется от потребления электрической мощности для работы геомагнитного датчика 8.
Помимо этого блок 29 управления работой деактивирует также блок 28 вычисления ориентации и блок 27 определения пространственного положения, который подает данные AAD пространственного положения в блок 28 вычисления ориентации.
Соответственно, мобильное телефонное устройство 101 может снизить приложенную к нему программную нагрузку, когда работают блок 28 вычисления ориентации и блок 27 определения пространственного положения. В результате мобильное телефонное устройство 101 предохраняется от потребления электрической мощности для работы блока 28 вычисления ориентации и блока 27 определения пространственного положения. Таким образом, мобильное телефонное устройство 101 может еще больше снизить потребление электрической мощности самого мобильного телефонного устройства 101.
Хотя деактивация геомагнитного датчика 8, блока 28 вычисления ориентации и блока 27 определения пространственного положения представляет собой одну возможность снизить программную нагрузку, когда определено, что мобильное телефонное устройство 101 прикреплено к опоре 103, возможны и различные другие реализации.
Например, блок 29 управления работой может деактивировать только блок 28 вычисления ориентации, сохраняя геомагнитный датчик 8 и блок 27 определения пространственного положения в активном состоянии. Блок 29 управления работой может также поддерживать блок 28 вычисления ориентации активным, но управлять блоком 28 вычисления ориентации, чтобы он не вычислял ориентацию, тем самым эффективно игнорируя сигналы, принимаемые от геомагнитного датчика 8 и блока 27 определения пространственного положения. Блок 29 управления работой может также деактивировать один или несколько из геомагнитного датчика 8, блока 28 вычисления ориентации и блока 27 определения пространственного положения, чтобы снизить программную нагрузку, когда определено, что мобильное телефонное устройство 101 прикреплено к опоре 103.
Результат деактивации любого из геомагнитного датчика 8, блока 28 вычисления ориентации и(или) блока 27 определения пространственного положения либо управление блоком 28 вычисления ориентации, чтобы он игнорировал сигналы, принимаемые или из геомагнитного датчика 8, или из блока 27 определения пространственного положения, состоит в управлении блоком 28 вычисления ориентации не вычислять ориентацию мобильного телефонного устройства 101.
Когда мобильное телефонное устройство 101 не прикреплено к опоре 103, предполагается, что мобильное телефонное устройство 101 не прикреплено к транспортному средству 9 и переносится пользователем. Соответственно, мобильное телефонное устройство 101 работает в пешеходном режиме.
В этом случае геомагнитный датчик 8 может определять геомагнитные значения М, представляющие точную ориентацию. Поэтому блок 29 управления работой активирует геомагнитный датчик 8.
В пешеходном режиме мобильное телефонное устройство 101 вычисляет ориентацию С на основе геомагнитных данных TMD, поданных из геомагнитного датчика 8, и воспроизводит изображение GC компаса на дисплейном блоке 102 на основе вычисленной ориентации С.
В режиме в транспортном средстве мобильное телефонное устройство 101 вычисляет ориентацию на основе данных NPD1 текущего положения и данных NPD2 текущего положения и воспроизводит изображение GC компаса на дисплейном блоке 102 на основе вычисленной ориентации С.
Таким образом, мобильное телефонное устройство 101 воспроизводит изображение GC компаса для представления ориентации пользователю либо в режиме в транспортном средстве, либо в пешеходном режиме.
3. Другие варианты осуществления
В вышеописанных вариантах осуществления геомагнитный датчик 8, блок 28 вычисления ориентации и блок 27 определения пространственного положения деактивируются, когда ПНУ 1 прикреплено к транспортному средству 9.
Настоящее изобретение не ограничено этим, и процесс управления может также выполняться так, что деактивируется только геомагнитный датчик 8. Однако потребление электрической мощности можно снизить еще больше, если дополнительно деактивируются блок 28 вычисления ориентации и блок 27 определения пространственного положения.
Помимо этого в вышеописанных вариантах осуществления блок 28 вычисления ориентации вычисляет ориентацию С, выполняя вычисление коррекции наклона с помощью данных AAD пространственного положения для исключения влияния наклона ПНУ 1 по отношению к наземной плоскости из геомагнитных данных TMD.
Настоящее изобретение не ограничивается этим, и блок 28 вычисления ориентации может вычислять ориентацию С на основе только геомагнитных значений М, соответствующих геомагнитным данным TMD, поданным из геомагнитного датчика 8. Однако в случае когда ПНУ 1 или мобильное телефонное устройство 101 наклонены по отношению к наземной плоскости, ориентацию С можно вычислять более точно, когда выполняется вычисление коррекции наклона.
Помимо этого в вышеописанных вариантах осуществления данные NPD2 текущего положения вычисляются на основе данных, определенных датчиком 4 ускорения по трем осям, гироскопического датчика 5 по оси Y и гироскопического датчика 6 по оси Z.
Настоящее изобретение не ограничивается этим, и данные текущего положения можно вычислять на основе данных, полученных различными датчиками. Например, как описано в выложенной заявке на патент Японии №2008-076374, скорость и угловую скорость транспортного средства можно определить с помощью датчика ускорения, датчика атмосферного давления и гироскопического датчика, а данные текущего положения можно вычислить на основе скорости и угловой скорости транспортного средства.
Помимо этого в вышеописанных вариантах осуществления пользователю подсказывают перемещать ПНУ 1 восьмеркой в процессе инициализации.
Настоящее изобретение не ограничивается этим, и процесс инициализации можно выполнять различными способами. Например, ПНУ 1 можно просто поворачивать. Помимо этого, хотя в вышеописанных вариантах осуществления пользователю подсказывают выполнять процесс инициализации, ПНУ 1 может выполнять процесс инициализации автоматически.
Помимо этого в вышеописанных вариантах осуществления дисплей в процессе навигации представлен в режиме навигации по направлению. Настоящее изобретение не ограничивается этим, и дисплей вместо этого может быть представлен в процессе навигации в режиме «север вверху» или различных иных режимах.
В вышеописанных вариантах осуществления датчик 4 ускорения по трем осям, гироскопический датчик 5 по оси Y, гироскопический датчик 6 по оси Z, датчик 7 атмосферного давления и геомагнитный датчик 8 размещены в ПНУ 1. Однако настоящее изобретение не ограничивается этим, и датчик 4 ускорения по трем осям, гироскопический датчик 5 по оси Y, гироскопический датчик 6 по оси Z, датчик 7 атмосферного давления и геомагнитный датчик 8 могут быть размещены вне ПНУ 1.
Помимо этого в вышеописанных вариантах осуществления ПНУ 1 или мобильное телефонное устройство 101 прикреплены к транспортному средству, которое функционирует как движущееся тело. Однако настоящее изобретение не ограничивается этим, и ПНУ 1 и мобильное телефонное устройство 101 могут также устанавливаться в иных типах движущихся тел, таких как корабль, поезд и тому подобное.
Помимо этого в вышеописанных вариантах осуществления управляющий блок 11 выполняет программу RT2 процесса управления работой в соответствии с прикладной программой, заранее сохраненной в запоминающем блоке 12.
Настоящее изобретение не ограничивается этим, и управляющий блок 11 может выполнять процесс управления работой в соответствии с прикладной программой, установленной с носителя данных, прикладной программой, загруженной из Интернета, или прикладной программой, установленной различными иными путями.
Помимо этого в вышеописанных вариантах осуществления ПНУ 1, которое служит в качестве навигационного устройства, включает в себя ПНУ 1 как основной блок, блок 21 обработки GPS как блок определения текущего положения, блок 25 вычисления положения, навигационный блок 26, геомагнитный датчик 8 в качестве геомагнитного датчика, блок 28 вычисления ориентации как блок вычисления ориентации, блок 17 обнаружения опоры как обнаружитель состояния прикрепления и блок 219 управления работой как блок управления работой.
Настоящее изобретение не ограничивается этим, и навигационное устройство может включать в себя основной блок, блок определения текущего положения, блок вычисления текущего положения, геомагнитный датчик, блок вычисления ориентации, обнаружитель состояния прикрепления и блок управления работой, имеющие различные иные структуры.
Помимо этого в вышеописанных вариантах осуществления мобильное телефонное устройство 101, которое служит в качестве мобильного терминального устройства, включает в себя мобильное телефонное устройство 101 в качестве основного блока, блок 21 обработки GPS в качестве блока определения текущего положения, блок 25 вычисления положения, навигационный блок 26, блок 28 вычисления ориентации в качестве блока вычисления ориентации, блок 17 обнаружения опоры в качестве обнаружителя состояния прикрепления, блок 29 управления работой в качестве блока управления работой и мобильный телефонный блок 110 в качестве мобильного телефонного блока.
Настоящее изобретение не ограничивается этим, и мобильное телефонное устройство может включать в себя основной блок, блок определения текущего положения, блок вычисления текущего положения, геомагнитный датчик, блок вычисления ориентации, обнаружитель состояния прикрепления, блок управления работой и мобильный телефонный блок, имеющие различные иные структуры.
Настоящая заявка содержит предмет, связанный с тем, что раскрыто в приоритетной заявке на патент Японии №2009-216082, поданной 17 сентября 2009 года, все содержание которой включено сюда посредством ссылки.
Специалистам следует понимать, что различные модификации, комбинации, подкомбинации и изменения могут иметь место в зависимости от конструктивных требований и прочих факторов, если они находятся в объеме приложенной формулы изобретения или ее эквивалентов.


Изобретение относится к области приборостроения и может быть использовано в устройствах мобильной связи. Технический результат - расширение функциональных возможностей. Для этого навигационное устройство включает в себя: геомагнитный датчик, который определяет геомагнитное поле навигационного устройства; блок вычисления ориентации, который вычисляет ориентацию навигационного устройства на основе определенного геомагнитного поля; блок обнаружения опоры, который обнаруживает то, что навигационное устройство присоединено к опоре, и выдает сигнал, индицирующий, что навигационное устройство присоединено к опоре; и блок управления работой, который принимает сигнал, выдаваемый блоком обнаружения опоры, и управляет блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства на основе определенного геомагнитного поля. 3 н. и 17 з.п. ф-лы, 16 ил.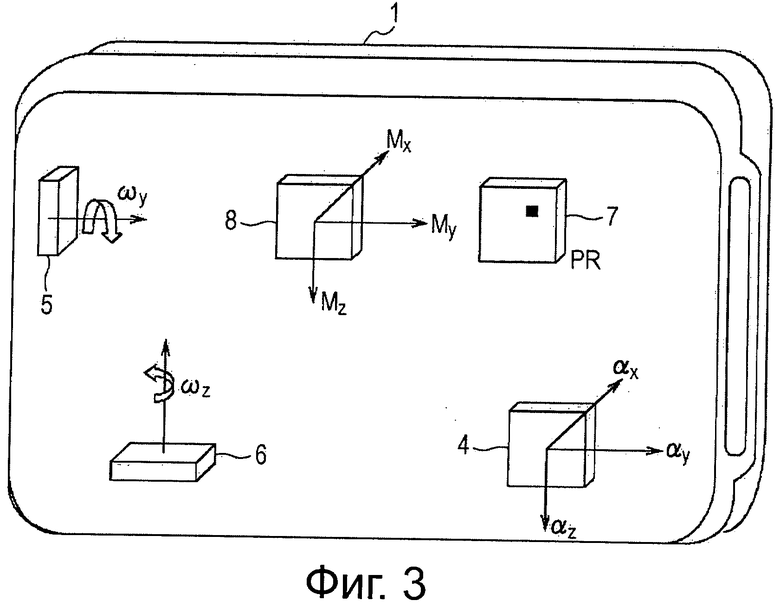
1. Навигационное устройство, содержащее:
- геомагнитный датчик, выполненный с возможностью определять геомагнитное поле навигационного устройства;
- блок вычисления ориентации, выполненный с возможностью вычисления ориентации навигационного устройства на основе определенного геомагнитного поля;
- блок обнаружения опоры, выполненный с возможностью обнаружения того, что навигационное устройство присоединено к опоре, и выдачи сигнала, индицирующего, что навигационное устройство присоединено к опоре; и
- блок управления работой, выполненный с возможностью принимать сигнал, выдаваемый блоком обнаружения опоры, и управлять блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства на основе определенного геомагнитного поля.
2. Навигационное устройство по п.1, в котором:
- блок управления работой выполнен с возможностью управлять блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, путем деактивации геомагнитного датчика.
3. Навигационное устройство по п.1, в котором:
- блок управления работой выполнен с возможностью управлять блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, путем деактивации блока вычисления ориентации.
4. Навигационное устройство по п.1, в котором:
- блок управления работой выполнен с возможностью управлять блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, путем управления блоком вычисления ориентации игнорировать сигнал, принятый от геомагнитного датчика.
5. Навигационное устройство по п.1, содержащее далее:
- блок определения угла пространственного положения, выполненный с возможностью определять угол пространственного положения, указывающий угол наклона навигационного устройства по отношению к наземной плоскости.
6. Навигационное устройство по п.5, в котором:
- блок вычисления ориентации выполнен с возможностью вычислять ориентацию навигационного устройства на основе найденного угла пространственного положения и определенного геомагнитного поля.
7. Навигационное устройство по п.6, в котором:
- блок управления работой выполнен с возможностью управлять блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, путем деактивации блока определения пространственного угла.
8. Навигационное устройство по п.6, в котором:
- блок управления работой выполнен с возможностью управлять блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, путем деактивации блока вычисления ориентации.
9. Навигационное устройство по п.6, в котором:
- блок управления работой выполнен с возможностью управлять блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, путем управления блоком вычисления ориентации игнорировать сигнал, принятый от блока определения пространственного угла.
10. Навигационное устройство по п.1, в котором навигационное устройство является мобильным телефоном.
11. Энергонезависимый машиночитаемый носитель, включающий в себя команды компьютерной программы, которые при исполнении навигационным устройством заставляют это навигационное устройство выполнять способ, содержащий:
- этап, на котором определяют в геомагнитном датчике навигационного устройства геомагнитное поле навигационного устройства;
- этап, на котором вычисляют в блоке вычисления ориентации навигационного устройства ориентацию навигационного устройства на основе определенного геомагнитного поля;
- этап, на котором определяют в блоке обнаружения опоры навигационного устройства, что навигационное устройство присоединено к опоре, и выдают сигнал, указывающий, что навигационное устройство присоединено к опоре; и
- этап, на котором принимают в блоке управления работой навигационного устройства сигнал, выданный из блока обнаружения опоры, и управляют блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства на основе определенного геомагнитного поля.
12. Энергонезависимый машиночитаемый носитель по п.11, в котором:
- управление блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, включает в себя деактивацию геомагнитного датчика.
13. Энергонезависимый машиночитаемый носитель по п.11, в котором:
- управление блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, включает в себя деактивацию блока вычисления ориентации.
14. Энергонезависимый машиночитаемый носитель по п.11, в котором:
- управление блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, включает в себя управление блоком вычисления ориентации игнорировать сигнал, принятый от геомагнитного датчика.
15. Энергонезависимый машиночитаемый носитель по п.11, в котором навигационное устройство является мобильным телефоном.
16. Способ, выполняемый навигационным устройством, содержащий:
- этап, на котором определяют в геомагнитном датчике навигационного устройства геомагнитное поле навигационного устройства;
- этап, на котором вычисляют в блоке вычисления ориентации навигационного устройства ориентацию навигационного устройства на основе определенного геомагнитного поля;
- этап, на котором определяют в блоке обнаружения опоры навигационного устройства, что навигационное устройство присоединено к опоре, и выдают сигнал, указывающий, что навигационное устройство присоединено к опоре; и
- этап, на котором принимают в блоке управления работой навигационного устройства сигнал, выданный из блока обнаружения опоры, и управляют блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства на основе определенного геомагнитного поля.
17. Способ по п.16, в котором:
- управление блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, включает в себя деактивацию геомагнитного датчика.
18. Способ по п.16, в котором:
- управление блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, включает в себя деактивацию блока вычисления ориентации.
19. Способ по п.16, в котором:
- управление блоком вычисления ориентации, чтобы он не определял ориентацию навигационного устройства, включает в себя управление блоком вычисления ориентации игнорировать сигнал, принятый от геомагнитного датчика.
20. Способ по п.16, в котором навигационное устройство является мобильным телефоном.
| US 20080234935 A1, 25.09.2008 | |||
| ИНКЛИНОМЕТР | 1998 |
|
RU2172828C2 |
| МАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ТЕЛА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2130619C1 |
| СПОСОБ НАВИГАЦИИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2132042C1 |
| Способ определения навигационных параметров | 1981 |
|
SU1098382A1 |

