Изобретение относится к области радиолокационной техники и может быть использовано при создании бортовых датчиков обнаружения цели на заданных дальностях с использованием сверхширокополосных шумовых (СШП-шумовых) сигналов.
Известен способ обнаружения цели на заданной дальности СШП-шумовой радиолокационной станцией (РЛС) с взаимно-корреляционной обработкой сигналов, выбранный за аналог [1].
Способ [1] осуществляется следующим образом.
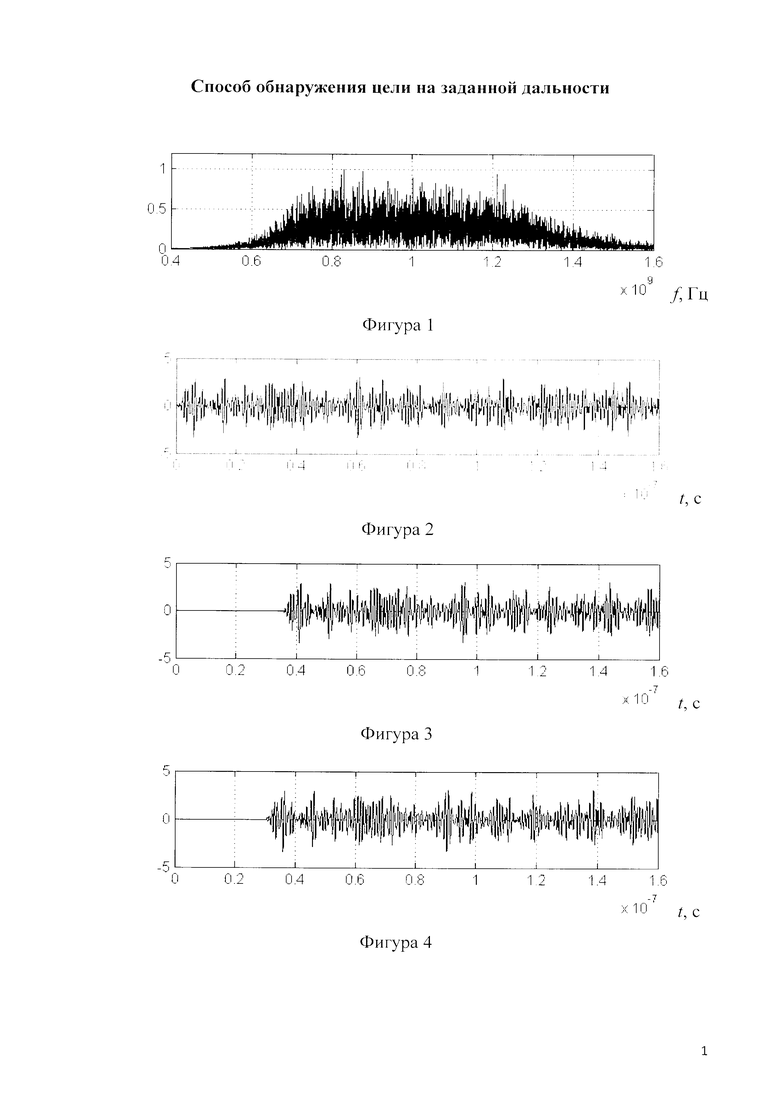
Излучаются радиоволны в виде шумового сигнала с СШП-спектром, показанным на фиг. 1, и осциллограммой, показанной на фиг. 2. Отраженные радиоволны в виде сигнала, показанного на фиг. 3, и опорный сигнал в виде задержанной по времени копии излучаемого сигнала, показанный на фиг. 4, подвергаются свертке для получения взаимно-корреляционной функции отраженного и опорного сигналов, показанной на фиг. 5. Факт нахождения цели на заданной дальности определяется по наличию максимума взаимно-корреляционной функции отраженного и опорного сигналов при квадратурной обработке.
Недостатками способа [1] являются:
- ограниченный диапазон дальностей из-за сложности формирования опорных сигналов квадратурных каналов для больших дальностей ввиду проблематичности получения соответствующих им значений времени задержки СШП-шумовых сигналов;
- сложность обеспечения квадратурной обработки для СШП-шумовых сигналов.
Известен способ обнаружения цели на заданной дальности СШП-шумовой РЛС с обработкой сигналов методом двойного спектрального анализа (ДСА) с последовательным анализом спектра суммарного сигнала, выбранный за аналог [2].
Способ [2] осуществляется следующим образом.
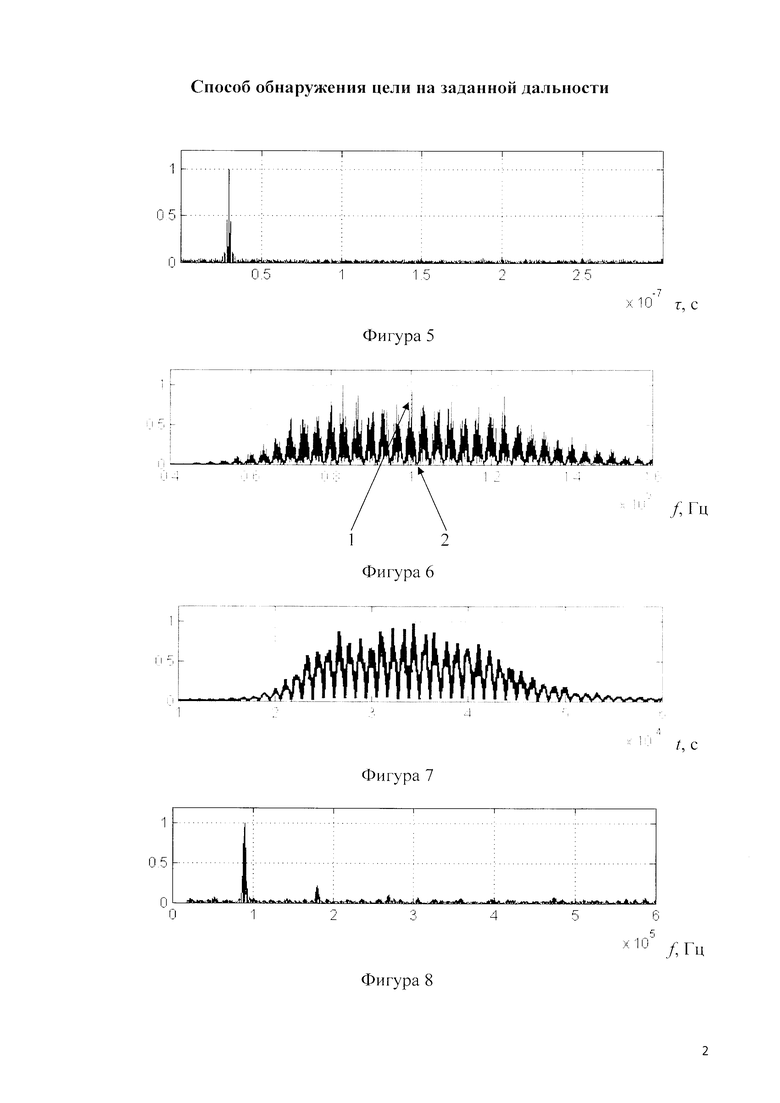
В направлении цели излучаются радиоволны в виде шумового сигнала с СШП-спектром, показанным на фиг. 1, и осциллограммой, показанной на фиг. 2. Отраженные от цели радиоволны в виде сигнала, показанного на фиг. 3, складываются некогерентно с опорным сигналом в виде части излучаемых радиоволн, образуя суммарный сигнал, в спектральной области которого, как показано на фиг. 6, образуется периодическая интерференционная картина. Спектр суммарного сигнала модулирован функцией с периодом, обратно пропорциональным задержке сигналов. На заданной дальности до цели в полосе спектра суммарного сигнала наблюдаются эквидистантно расположенные на частотной оси максимумы (фиг. 6, поз. 1) и минимумы (фиг. 6, поз. 2) спектра. С помощью узкополосной последовательной во времени фильтрации модуляция спектра суммарного сигнала из частотной области переносится во временную, как показано на фиг. 7. Спектр сигнала, показанного на фиг. 7, приведен на фиг. 8. Так как частота модуляции спектра суммарного сигнала зависит от дальности до цели, факт обнаружения цели на заданной дальности определяется узкополосной фильтрацией на частоте модуляции этого сигнала, соответствующей заданной дальности.
Недостатками способа [2] являются:
- низкое быстродействие, обусловленное последовательным анализом спектра суммарного сигнала перестраиваемым по частоте узкополосным избирательным устройством, требующим значительного времени для просмотра всего спектра суммарного сигнала;
- наличие ограничений на диапазон определяемых дальностей, обусловленных необходимостью с увеличением дальности сужать полосу пропускания перестраиваемого по частоте избирательного устройства, что приводит к росту времени установления в нем колебаний и увеличению количества отсчетов частоты при анализе спектра суммарного сигнала, т.е. увеличения времени его просмотра;
- низкий энергетический потенциал СШП-шумовой РЛС, обусловленный узкополосной фильтрацией при последовательном анализе спектра суммарного сигнала.
Известен способ обнаружения цели на заданной дальности СШП-шумовой РЛС с обработкой сигналов методом ДСА с параллельным анализом спектра суммарного сигнала, выбранный за прототип [3].
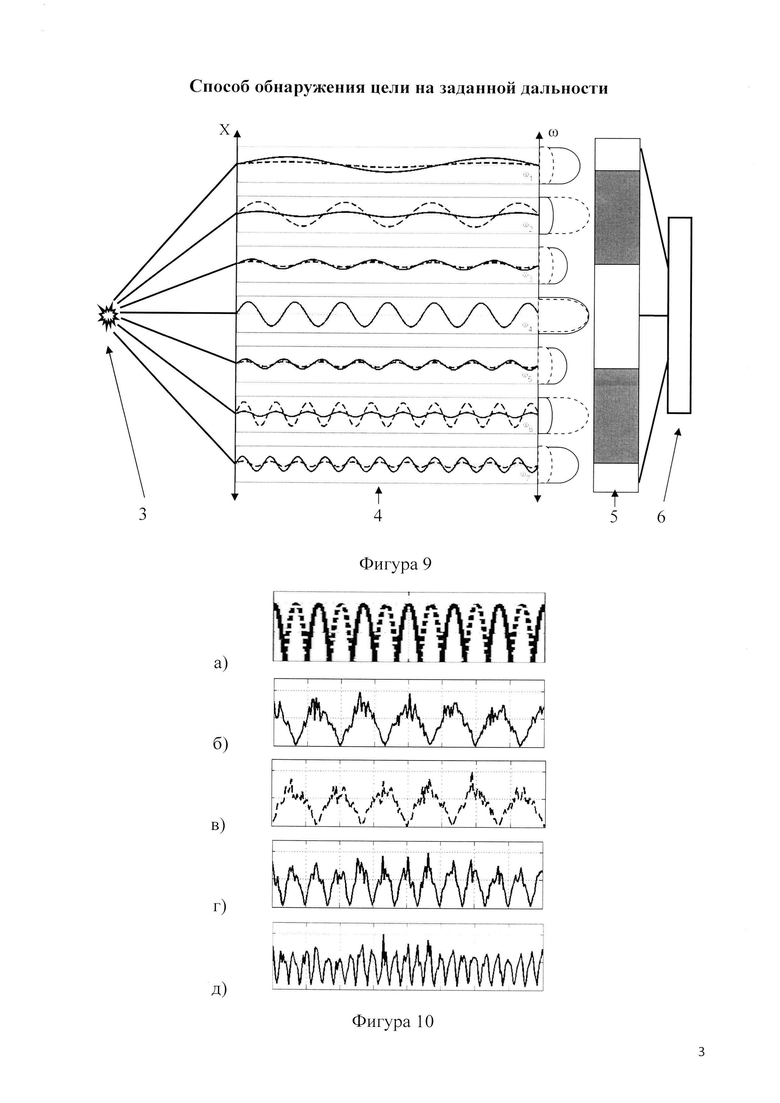
Сущность способа [3] состоит в акустооптической модуляции суммарным сигналом, спектр которого приведен на фиг. 6, светового пучка от источника оптического излучения (поз. 3 на фиг. 9) с образованием пространственных фурье-гармоник (поз. 4 на фиг. 9), оптической гребенчатой фильтрации (поз. 5 на фиг. 9) пространственных гармоник, соответствующих заданной дальности до цели. Пространственные гармоники, прошедшие оптическую гребенчатую фильтрацию, интегрируются и оптоэлектронным преобразованием (поз. 6 на фиг. 9) переносятся в радиодиапазон для последующей регистрации наличия цели на заданной дальности.
На дальностях, кратных четным значениям заданной дальности до цели, часть пространственных гармоник, соответствующих максимумам спектра суммарного сигнала, будет также регистрироваться, как сигнал на заданной дальности до цели. Пример регистрации факта наличия цели на заданной дальности при истинном значении, равном ее удвоенному значению, поясняет фиг. 10. Как видно на фиг. 10г, пространственный спектр суммарного сигнала при истинной дальности до цели, равной удвоенному значению заданной дальности до цели, уплотняется вдвое, но оптической гребенчатой фильтрацией выделяется только половина его максимумов. В результате вместо истинной дальности до цели будет зафиксирована заданная дальность до цели.
Недостатками способа [3] являются:
- возможность «ложного» обнаружения цели на дальностях, кратных четным значениям заданной дальности до цели;
- пониженное быстродействие ввиду наличия задержки суммарного сигнала в процессе его электроакустического преобразования;
- низкая экономичность из-за наличия источника оптического излучения и потерь в пьезопреобразователе при акустооптической модуляции, снижающей возможности его практического применения в бортовых РЛС;
- низкие ожидаемые значения стойкости к механическим воздействиям при его реализации в бортовых РЛС ввиду использования оптических компонентов;
- сложность практического использования СШП-шумовых сигналов ввиду ограниченности возможностей акустооптической модуляции по полосе и диапазону частот.
Техническим результатом предлагаемого изобретения являются высокие показатели быстродействия, диапазона дальностей и энергетического потенциала, экономичность, однозначность обнаружения цели на заданной дальности, а также возможность практической реализации в бортовой РЛС в радиодиапазоне с применением СВЧ-компонентов приемных устройств.
Технический результат достигается тем, что в способе обнаружения цели на заданной дальности сверхширокополосной шумовой радиолокационной станцией с обработкой сигналов методом двойного спектрального анализа отраженного сигнала, включающем параллельный спектральный анализ спектра суммарного сигнала, образованного сложением отраженного от цели сигнала с опорным сигналом в виде части излучаемого сигнала, для параллельного спектрального анализа спектра суммарного сигнала используют многоканальную параллельную фильтрацию на частотах максимумов и минимумов спектра суммарного сигнала, при этом решение о нахождении цели на заданной дальности принимают по наличию сигналов на выходе всех спектральных каналов, соответствующих максимумам спектра суммарного сигнала, и отсутствию их на выходе всех каналов, соответствующих минимумам спектра суммарного сигнала.
Кроме того, ширину полосы пропускания спектральных каналов выбирают равной половине периода следования максимумов спектра суммарного сигнала, а их частоты размещают эквидистантно на частотной оси.
Кроме того, фильтрацию на частотах максимумов спектра суммарного сигнала осуществляют спектральными каналами с фиксированными частотами, совпадающими с максимумами спектра суммарного сигнала на заданной дальности до цели, а для фильтрации на частотах минимумов спектр суммарного сигнала сдвигают на 1/2 периода его модуляции, например, поворотом фазы опорного сигнала на π.
Кроме того, для повышения быстродействия многоканальную параллельную фильтрацию осуществляют одновременно спектральными каналами, частоты которых совпадают с частотами максимумов и минимумов спектра суммарного сигнала на заданной дальности.
Применение спектральных каналов, согласованных с минимумами спектра суммарного сигнала, исключает «ложное» обнаружение цели на дальностях, кратных четным значениям заданной дальности до цели.
Способы обработки СШП-шумовых сигналов РЛС обнаружения на заданной дальности до цели поясняют следующие рисунки.
Фигура 1. Спектр излучаемого СШП-шумового сигнала.
Фигура 2. Осциллограмма напряжения излучаемого СШП-шумового сигнала.
Фигура 3. Осциллограмма напряжения отраженного сигнала.
Фигура 4. Осциллограмма напряжения опорного СШП-шумового сигнала.
Фигура 5. Взаимно-корреляционная функция отраженного и опорного СШП-шумовых сигналов.
Фигура 6. Спектр суммарного сигнала, образованного отраженным сигналом и частью излучаемого сигнала при обработке методом двойного спектрального анализа (1 - максимумы и 2 - минимумы спектра суммарного сигнала).
Фигура 7. Осциллограмма сигнала при переносе модуляции спектра суммарного сигнала во временную область.
Фигура 8. Спектр модуляции спектра суммарного сигнала.
Фигура 9. Метод акустооптической обработки суммарного сигнала (3 - источник оптического излучения; 4 - пространственные гармоники суммарного сигнала; 5 - оптический гребенчатый фильтр; 6 - оптоэлектронный преобразователь). Штриховой линией показана возможность «ложной» регистрации заданной дальности до цели методом акустооптической обработки.
Фигура 10. Форма АЧХ спектральных каналов (а). Настроенные на максимумы спектра суммарного сигнала спектральные каналы, соответствующие заданной дальности до цели, показаны сплошной линией, настроенные на минимумы спектра суммарного сигнала - штриховой линией. Огибающая спектра суммарного сигнала на заданной дальности до цели (б). Огибающая спектра суммарного сигнала, сдвинутого на 1/2 периода его модуляции на заданной дальности до цели (в). Огибающая спектра суммарного сигнала для удвоенного значения заданной дальности до цели (г). Огибающая спектра суммарного сигнала для увеличенного в 4 раза значения заданной дальности до цели (д).
Предлагаемый способ обнаружения цели на заданной дальности методом двойного спектрального анализа с параллельным анализом спектра суммарного сигнала осуществляется следующим образом.
В направлении цели излучаются радиоволны в виде СШП-шумового сигнала со спектром, показанным на фиг. 1, и осциллограммой, показанной на фиг. 2. На заданной дальности до цели в полосе спектра суммарного сигнала (фиг. 6), образованного сложением отраженного от цели сигнала с опорным сигналом в виде части излучаемого сигнала, наблюдаются эквидистантно расположенные на частотной оси максимумы и минимумы этого спектра (соответственно поз. 1 и поз. 2 на фиг. 6). Аналитическое выражение спектра мощности суммарного сигнала имеет вид [4]

где S(ƒ) - спектр мощности излучаемого сигнала, τ - величина задержки отраженного сигнала.
Расстановка частот, соответствующих максимумам и минимумам спектра суммарного сигнала на частотной оси, может быть определена как
где ƒ1 и ƒ2 - нижняя и верхняя частоты спектра излучаемого сигнала.
Многоканальной фильтрацией, согласованной по частотам спектральных каналов с максимумами спектра суммарного сигнала на заданной дальности до цели, как показано на фиг. 10а (сплошная линия), выделяются и анализируются выходные сигналы спектральных каналов, при этом ширина полосы пропускания каждого из них составляет  периода следования максимумов (минимумов) спектра суммарного сигнала.
периода следования максимумов (минимумов) спектра суммарного сигнала.
При появлении на выходе всех спектральных каналов сигналов максимального уровня спектр суммарного сигнала (фиг. 10б) сдвигается на периода его модуляции, например поворотом фазы опорного сигнала на π, как показано на фиг. 10в (штриховая линия), и при отсутствии сигналов на выходе спектральных каналов принимается решение о нахождении цели на заданной дальности. При наличии сигнала на выходе спектральных каналов после сдвига спектра суммарного сигнала на периода его модуляции фаза опорного сигнала возвращается в исходное состояние и цикл анализа спектра повторяется. Аналитическое выражение спектра мощности суммарного сигнала, образованного сложением отраженного от цели сигнала с опорным сигналом, сдвинутым на величину π, имеет вид

Решение о наличии и отсутствии сигнала на выходе спектральных каналов принимается с учетом критериев заданных вероятностей правильного обнаружения и «ложного» обнаружения цели на заданной дальности.
Для повышения быстродействия обработка суммарного сигнала осуществляется одновременно на частотах максимумов и минимумов (фиг. 10а), при этом решение о нахождении цели на заданной дальности принимается по результатам анализа сигналов на выходе всех спектральных каналов. Алгоритм анализа спектра суммарного сигнала по положению максимумов и минимумов позволяет исключить «ложное» обнаружение сигнала на дальностях, кратных четным значениям заданной дальности до цели.
Возможности образования «ложной» регистрации для удвоенного и увеличенного в 4 раза значений заданной дальности до цели при отсутствии анализа минимумов спектра суммарного сигнала поясняют соответственно фиг. 10г и фиг. 10д.
Соотношение, в соответствии с которым период модуляции спектра суммарного сигнала FM связан с дальностью до цели LЦ, имеет вид [2]

При увеличении дальности до цели период частотной модуляции FM спектра суммарного сигнала уменьшается, что приводит к необходимости уменьшения полосы пропускания спектральных каналов, практическая реализация которой может оказаться проблематичной. С целью повышения периода частотной модуляции FM опорный сигнал на суммирование с отраженным сигналом подается с задержкой Т0 и в соответствии с [2]

где ТMAX - задержка отраженного сигнала на максимальной дальности до цели.
В случае уменьшения дальности до цели, при значении которой нарушается интерференция полностью некогерентных сигналов, т.е. отраженный и опорный сигналы становятся когерентными, отраженный сигнал на суммирование с опорным сигналом подается с задержкой ТДОП и в соответствии с [2]

где ТMIN - задержка отраженного сигнала на минимальной дальности до цели.
Так как многоканальная фильтрация согласована с максимумами спектра суммарного сигнала для заданной дальности до цели, энергетические потери отраженного сигнала при предлагаемом способе обнаружения цели на заданной дальности будут минимальными, что обеспечит высокий энергетический потенциал РЛС.
Практическая реализация предлагаемого способа обнаружения цели на заданной дальности может осуществляться непосредственно в радиодиапазоне с применением известных компонентов СВЧ приемной аппаратуры.
Литература
1. Избранные задачи теории сверхширокополосных радиолокационных систем / В.В. Чапурский. - М.: изд-во МГТУ им. Баумана, 2012. - 214-215 с.
2. Калинин В.И. Сверхширокополосная радиолокация с двойной спектральной обработкой шумовых сигналов / В.И. Калинин // Радиотехника. - 2005. - №3. - С. 25-35.
3. Быстров Р.П. Предложения по технической реализации устройств шумовых РЛС со спектральной обработкой сигналов / Р.П. Быстров, В.Е. Кузьмичев, А.С. Романовский, С.А. Соколов, Ю.В. Соколов, Л.В. Федорова // Журнал радиоэлектроники. - 2015. - №5. - С. 47-50.
4. Пуарье. Возможность использования шумового квазимонохроматического сигнала в радиолокации / Пуарье // Зарубежная радиоэлектроника. - 1969. - №7. - С. 12-22.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ НЕПОДВИЖНЫХ ОБЪЕКТОВ С ПОМОЩЬЮ ШУМОВОГО СИГНАЛА И ШУМОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, РЕАЛИЗУЮЩАЯ ДАННЫЙ СПОСОБ | 2024 |
|
RU2831136C1 |
| Способ повышения разрешающей способности радиолокационного сверхширокополосного зондирования | 2019 |
|
RU2710837C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| СПОСОБ РАДИОЛОКАЦИИ НА ОСНОВЕ МНОГОПОЗИЦИОННЫХ СИСТЕМ ПЕРЕДАЧИ И ПРИЕМА | 2024 |
|
RU2840797C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ВРЕМЕННОГО ПОЛОЖЕНИЯ СВЕРХШИРОКОПОЛОСНОГО СИГНАЛА И ЛОКАТОР ДЛЯ МОНИТОРИНГА ЖИВЫХ ОБЪЕКТОВ, РЕАЛИЗУЮЩИЙ ЭТОТ СПОСОБ | 2004 |
|
RU2258942C1 |
| СВЕРХШИРОКОПОЛОСНЫЙ РАДИОЛОКАТОР С АКТИВНОЙ МНОГОЧАСТОТНОЙ АНТЕННОЙ РЕШЕТКОЙ | 2016 |
|
RU2615996C1 |
| Способ обнаружения сверхширокополосного сигнала | 2015 |
|
RU2606634C2 |
| РАДИОЛОКАТОР С НЕПРЕРЫВНЫМ ШУМОВЫМ СИГНАЛОМ И СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА ИЗМЕРЯЕМЫХ ДАЛЬНОСТЕЙ В РАДИОЛОКАТОРЕ С НЕПРЕРЫВНЫМ СИГНАЛОМ | 2015 |
|
RU2589036C1 |
| СКАНИРУЮЩАЯ МНОГОЧАСТОТНАЯ АНТЕННАЯ РЕШЕТКА ДЛЯ ФОРМИРОВАНИЯ В ПРОСТРАНСТВЕ ПОСЛЕДОВАТЕЛЬНОСТИ СВЕРХШИРОКОПОЛОСНЫХ ИМПУЛЬСНЫХ СИГНАЛОВ С УПРАВЛЯЕМОЙ ЧАСТОТОЙ ПОВТОРЕНИЯ ИМПУЛЬСОВ | 2016 |
|
RU2634752C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО РАЗМЕЩЕННОГО НА ЛЕТАТЕЛЬНОМ АППАРАТЕ ИСТОЧНИКА ШУМОВОГО РАДИОСИГНАЛА САМОЛЕТНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2002 |
|
RU2231083C1 |
Изобретение относится к области радиолокационной техники и может быть использовано при создании бортовых датчиков обнаружения цели на заданных дальностях с использованием сверхширокополосных шумовых сигналов. Достигаемый технический результат – высокие показатели быстродействия, диапазона дальностей, энергетического потенциала, а также однозначность обнаружения цели на заданной дальности. Указанный результат достигается за счет того, что способ обнаружения цели на заданной дальности сверхширокополосной шумовой радиолокационной станцией с обработкой сигналов методом двойного спектрального анализа отраженного сигнала включает параллельный спектральный анализ спектра суммарного сигнала, образованного сложением отраженного от цели сигнала с опорным сигналом в виде части излучаемого сигнала, при этом для параллельного спектрального анализа спектра суммарного сигнала используют многоканальную параллельную фильтрацию на частотах максимумов и минимумов спектра суммарного сигнала, причем решение о нахождении цели на заданной дальности принимают по наличию сигналов на выходе всех спектральных каналов, соответствующих максимумам спектра суммарного сигнала, и отсутствию их на выходе всех каналов, соответствующих минимумам спектра суммарного сигнала. 3 з.п. ф-лы, 10 ил.
1. Способ обнаружения цели на заданной дальности сверхширокополосной шумовой радиолокационной станцией с обработкой сигналов методом двойного спектрального анализа отраженного сигнала, включающий параллельный спектральный анализ спектра суммарного сигнала, образованного сложением отраженного от цели сигнала с опорным сигналом в виде части излучаемого сигнала, отличающийся тем, что для параллельного спектрального анализа спектра суммарного сигнала используют многоканальную параллельную фильтрацию на частотах максимумов и минимумов спектра суммарного сигнала, при этом решение о нахождении цели на заданной дальности принимают по наличию сигналов на выходе всех спектральных каналов, соответствующих максимумам спектра суммарного сигнала, и отсутствию их на выходе всех каналов, соответствующих минимумам спектра суммарного сигнала.
2. Способ обнаружения цели на заданной дальности по п. 1, отличающийся тем, что ширину полосы пропускания спектральных каналов выбирают равной половине периода следования максимумов спектра суммарного сигнала, а их частоты размещают эквидистантно на частотной оси.
3. Способ обнаружения цели на заданной дальности по п. 1, отличающийся тем, что фильтрацию на частотах максимумов спектра суммарного сигнала осуществляют спектральными каналами с фиксированными частотами, совпадающими с максимумами спектра суммарного сигнала на заданной дальности до цели, а для фильтрации на частотах минимумов спектр суммарного сигнала сдвигают на 1/2 периода его модуляции, например, поворотом фазы опорного сигнала на π.
4. Способ обнаружения цели на заданной дальности по п. 1, отличающийся тем, что для повышения быстродействия многоканальную параллельную фильтрацию осуществляют одновременно спектральными каналами, частоты которых совпадают с частотами максимумов и минимумов спектра суммарного сигнала на заданной дальности.
| БЫСТРОВ Р.П | |||
| и др | |||
| Предложения по технической реализации устройств шумовых РЛС со спектральной обработкой сигналов.Журнал радиоэлектроники | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА И РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС ДЛЯ РЕАЛИЗАЦИИ СПОСОБА (ВАРИАНТЫ) | 2011 |
|
RU2471201C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ЗОНЫ ПРОСТРАНСТВА (ВАРИАНТЫ) | 2008 |
|
RU2405168C2 |
| СПОСОБ КОНТРОЛЯ ВОЗДУШНОГО ПРОСТРАНСТВА, ОБЛУЧАЕМОГО ВНЕШНИМИ ИСТОЧНИКАМИ ИЗЛУЧЕНИЯ, И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2285939C1 |
| US 5400031 А, 21.03.1995 | |||
| WO 2001027654 A1, 19.04.2001 | |||
| US 5784026 A, 21.07.1998. | |||

