Предлагаемое изобретение относится к области пассивной радиолокации и может быть использовано для измерения дальности до размещенного на летательном аппарате источника шумового или шумоподобного радиосигнала самолетной радиолокационной станцией (РЛС).
Известны активные способы измерения дальности до самолетов и подвижных наземных и надводных объектов с использованием шумоподобных сигналов, при которых часть энергии излучаемого сигнала подают на суммирующее устройство вместе с принятым отраженным от цели сигналом, находят энергетический спектр суммарного шумоподобного сигнала, имеющий периодический характер, и по периоду спектра находят время запаздывания отраженного от цели сигнала (дальность) как величину, обратную этому периоду [US 03603990, кл. 343-5, SU 0792183, кл. G 01 S 13/02, ”3арубежная радиоэлектроника” 1973 г. №2. Тонкин, Сэвэдис “Применение корреляционной обработки сигналов в радиолокационных системах”].
Известны также способы передачи информации шумовыми сигналами в виде временной задержки шумового сигнала; передается сигнал, являющийся суммой исходного и задержанного сигналов, а на приемном конце вычисляют функцию автокорреляции принятого сигнала и по расстоянию между корреляционными максимумами находят время задержки, в котором закодирована информация [Н. Петрович, М. Размахнин “Системы связи с шумоподобными сигналами”, М., Сов. радио, 1969 г., с.96].
Наиболее близким по технической сущности является способ измерения дальности до источника импульсного радиоизлучения пассивной радиолокацией, при котором использованы каналы прямого и отраженного луча со своими антеннами, причем одна антенна применялась для слежения за угловыми координатами источника излучения и приема опорных импульсов для измерения дальности, а вторая антенна, повернутая на известный угол к земной поверхности, принимала сигнал, отраженный от земли в сторону РЛС. По известным угловым координатам источника излучения и известному положению антенны отраженного от земли луча, высоте полета и разности временных задержек импульсов в каналах прямого и отраженного луча в счетно-решающем приборе находили дальность до источника излучения [Радиолокационные устройства” под ред. В.В. Григорина - Рябова “Сов. радио”, М., 1970 г., с. 482].
Недостатком этого способа является необходимость иметь две антенны и невозможность измерить дальность до источника радиосигнала шумоподобной формы.
Техническим результатом предлагаемого изобретения является достижение возможности измерения дальности до размещенного на летательном аппарате источника шумового или шумоподобного радиосигнала самолетной радиолокационной станцией в пассивном режиме работы.
Технический результат достигается тем, что способ измерения дальности до размещенного на летательном аппарате источника шумового радиосигнала самолетной радиолокационной станцией основан на обнаружении источника шумового радиосигнала, измерении его угловых координат и измерении разности времени задержки прямого сигнала от источника шумового радиосигнала и сигнала, отраженного от опорной точки на земле с заданными дальностью до нее и углом между направлениями на опорную точку и на источник шумового радиосигнала. Отличительными признаками предлагаемого способа являются спектральная обработка суммы сигналов, прямого от источника шумового радиосигнала и отраженного от опорной точки на земле, определение по полученной разности частот между максимумами энергетического спектра обратно пропорциональную ей разность времени задержки прямого сигнала от источника шумового радиосигнала и сигнала, отраженного от опорной точки на земле. Вычисление дальности до источника шумового радиосигнала по известным дальности до опорной точки и углу между направлениями на нее и на источник шумового радиосигнала, а также по измеренной разности времени задержки сигналов, прямого от источника шумового радиосигнала и отраженного от опорной точки на земле производится по формуле:

где Д - дальность до источника шумового радиосигнала,
d - разность времен задержки, выраженная в единицах дальности,
l - заданная дальность до опорной точки на земле,
α - угол между направлениями на опорную точку на земле и на источник шумового радиосигнала.
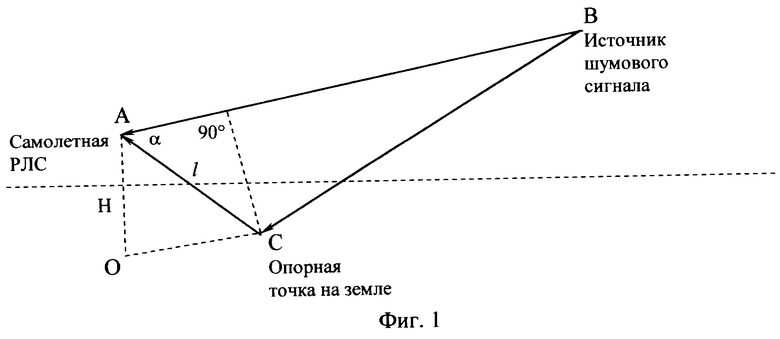
На фиг.1 приведены направления распространения шумового радиосигнала.
На фиг.2 приведен пример выполнения блок-схемы, реализующей предлагаемый способ.
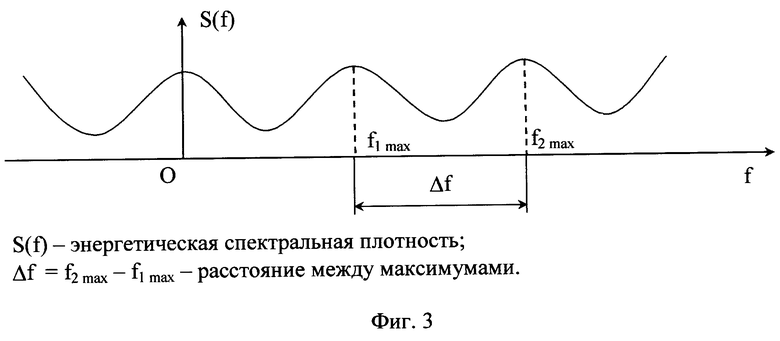
На фиг.3 приведен график энергетической спектральной плотности суммарного сигнала.
Самолетная радиолокационная станция, реализующая предлагаемый способ, состоит из последовательно соединенных антенны 1, приемника 2, анализатора спектра 3, вычислителя дальности 4.
Работа самолетной РЛС в пассивном режиме происходит следующим образом. Находящийся в точке В источник шумового радиосигнала обнаруживают самолетной радиолокационной станцией, расположенной в точке А, и измеряют угловые координаты источника шумового радиосигнала сигнала и по этим данным, известной высоте полета Н и заранее заданным расстоянию l до опорной точки С на земле и углу α между направлениями на эту точку и на источник шумового радиосигнала, рассчитывают угловые координаты опорной точки С на земле. В эту точку направляют, например, ось главного луча диаграммы направленности антенны 1. Расстояние l и угол α вычисляют заранее, исходя из геометрических соотношений.
Главным лепестком диаграммы направленности антенны 1 самолетной РЛС А принимают сигнал от источника шумового радиосигнала, отраженный от опорной точки на земле С, а по одному из боковых лепестков диаграммы направленности - прямой сигнал от источника шумового радиосигнала В. Принятые сигналы суммируют и усиливают в приемнике 2 и затем посредством анализатора спектра 3 вычисляют Δf - разность частот между максимумами энергетического спектра суммарного сигнала (фиг.3) и обратно пропорциональную Δf величину Δτ, которая представляет собой разность времен запаздывания сигналов по главному и боковому лепесткам ДНА, то есть разность расстояний
d=ДВСА-ДВА=c·Δτ;

где С - скорость света.
Расстояние от самолета до источника шумового сигнала ДВА = Д находится вычислителем дальности 4 по формуле:

где Д - дальность до источника шумового радиосигнала,
d - разность времен задержки, выраженная в единицах дальности,
l - заданная дальность до опорной точки на земле,
α - угол между направлениями на опорную точку на земле и на источник шумового радиосигнала.
От величины заранее заданных расстояния l и угла α зависит диапазон изменения интервала между максимумами энергетической спектральной плотности при различных значениях дальности до источника шумового сигнала. В современных РЛС спектроанализаторы обычно используются для измерения доплеровского смещения частоты сигналов, отраженных от целей.
Так, при l=15 км и α=30° при перемещении источника шума от очень больших дальностей до Д=25 км величина d изменяется от 2 км до 4 км, a Δf - от 150 кГц до 25 кГц, а при l=30 км и α=30° - от 75 кГц до 37 мГц.
Таким образом, достигается возможность измерения дальности до размещенного на летательном аппарате источника шумового или шумоподобного радиосигнала самолетной радиолокационной станцией в пассивном режиме работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОЛОКАЦИИ НА ОСНОВЕ МНОГОПОЗИЦИОННЫХ СИСТЕМ ПЕРЕДАЧИ И ПРИЕМА | 2024 |
|
RU2840797C1 |
| Способ определения параметров движения и траекторий воздушных объектов при полуактивной бистатической радиолокации | 2018 |
|
RU2687240C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАБОТАЮЩЕЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2010 |
|
RU2457505C2 |
| Способ определения местоположения работающей РЛС пассивным многолучевым пеленгатором | 2019 |
|
RU2741333C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2016 |
|
RU2633962C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2020 |
|
RU2758832C1 |
| Способ определения местоположения обзорной РЛС пассивным пеленгатором | 2018 |
|
RU2741331C2 |
| Способ радиопротиводействия беспилотному воздушному судну | 2024 |
|
RU2839399C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ЦЕЛЕЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2524923C1 |
| Способ создания зоны защиты территорий от низколетящих беспилотных летательных аппаратов | 2023 |
|
RU2821856C1 |

Предлагаемое изобретение относится к области пассивной радиолокации. Заявленный способ основан на обнаружении источника шумового радиосигнала, измерении его угловых координат и измерении разности времени задержки прямого сигнала от источника шумового радиосигнала и сигнала, отраженного от опорной точки на земле с заданными дальностью до нее и углом между направлениями на опорную точку и на источник шумового радиосигнала, спектральной обработке суммы сигналов, прямого от источника шумового радиосигнала и отраженного от опорной точки на земле, определении по полученной разности частот между максимумами энергетического спектра обратно пропорциональную ей разность времени задержки прямого сигнала от источника шумового радиосигнала и сигнала, отраженного от опорной точки на земле, вычислении дальности до источника шумового радиосигнала по известным дальности до опорной точки и углу между направлениями на нее и на источник шумового радиосигнала, а также по измеренной разности времени задержки сигналов, прямого от источника шумового радиосигнала и отраженного от опорной точки на земле. 3 ил.
Способ измерения дальности до размещенного на летательном аппарате источника шумового радиосигнала самолетной радиолокационной станцией, основанный на обнаружении источника шумового радиосигнала, измерении его угловых координат и измерении разности времени задержки прямого сигнала от источника шумового радиосигнала и сигнала, отраженного от опорной точки на земле с заданными дальностью до нее и углом между направлениями на опорную точку и на источник шумового радиосигнала, отличающийся тем, что производят спектральную обработку суммы сигналов, прямого от источника шумового радиосигнала и отраженного от опорной точки на земле, и по полученной разности частот между максимумами энергетического спектра определяют обратно пропорциональную ей разность времени задержки прямого сигнала от источника шумового радиосигнала и сигнала, отраженного от опорной точки на земле, и по известным дальности до опорной точки и углу между направлениями на нее и на источник шумового радиосигнала, а также по измеренной разности времени задержки сигналов, прямого от источника шумового радиосигнала и отраженного от опорной точки на земле, вычисляют дальность до источника шумового радиосигнала по формуле

где Д - дальность до источника шумового сигнала;
d - разность времен задержки, выраженная в единицах дальности;
l - заданная дальность до опорной точки на земле;
α - угол между направлениями на опорную точку на земле и на источник шумового радиосигнала.
| Радиолокационные устройства./Под ред | |||
| В.В | |||
| ГРИГОРИНА-РЯБОВА | |||
| - М.: Советское радио, 1970, с.482 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ГОРИЗОНТАЛЬНОЙ ДАЛЬНОСТИ ЦЕЛИ ПО ИЗЛУЧЕНИЮ СКАНИРУЮЩЕЙ РЛС | 1999 |
|
RU2166199C2 |
| ПАССИВНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134891C1 |
| US 3721986, 20.03.1973 | |||
| US 3982246, 21.09.1976. | |||

