Изобретение относится к области радиолокации и может быть использовано в авиационных бортовых радиолокационных станциях (БРЛС) для обнаружения летящего или зависшего вертолета на фоне подстилающей поверхности.
Известен способ обнаружения и распознавания типа вертолета с использованием радиолокационной станции «Method for the discovery and classification of helicopters by means of a radar installation» [GB 2253963, опубликовано 23.09.1992, МПК G01S]. Способ заключается в анализе ширины полосы амплитудно-частотного спектра сигнала отраженного от вращающейся лопасти вертолета, выделенного в соседних доплеровских фильтрах. Обнаружение отдельных составляющих амплитудно-частотного спектра сигнала осуществляется сравнением амплитуд, выделенных на выходах доплеровских фильтров с заранее заданным порогом.
Указанный способ основан на том, что ширина полосы амплитудно-частотного спектра сигнала отраженного от вращающейся лопасти вертолета превышает ширину полосы амплитудно-частотного спектра сигнала отраженного от других объектов и корпуса. При наблюдении вертолета с помощью БРЛС на фоне подстилающей поверхности спектр сигнала вращающейся лопасти может сливаться со спектром отражений от подстилающей поверхности, что приводит к невозможности определения ширины полосы амплитудно-частотного спектра отраженного от вращающейся лопасти вертолета и следовательно обнаружить вертолет.
Известно «Устройство для обнаружения и классификации летящих и зависших вертолетов» [RU 2293350, опубликовано 10.02.2007, МПК G01S 13/52]. Заявленное устройство работает следующим образом. Радиолокатор облучает цель. Сигнал отраженный от лопастей несущего винта вертолета принятый антенной подвергается процедуре быстрого преобразования Фурье для преобразования из временной в частотную область. На основании полученного доплеровского спектра определяют частоту Доплера соответствующую скорости движения корпуса летательного аппарата относительно антенны радиолокационной станции. Далее осуществляют компенсацию сигнала, отраженного от корпуса вертолета за счет подавления сигналов, неизменных по амплитуде от периода к периоду повторения. В результате после подавления сигнала, отраженного от корпуса, в рассмотрении остается лишь сигнал, отраженный от несущего винта. Далее сигнал поступает на пороговое устройство, в котором происходит определение максимального значения амплитудной модуляции в обработанном сигнале. Появление в обработанном сигнале существенных пиков свидетельствует о наличии летательного аппарата, т.к. данные максимальные значения амплитудной модуляции сигнала соответствуют сигналам, отраженным от лопастей несущего винта вертолета. Затем определяют период амплитудной модуляции сигнала. Полученное значение периода амплитудной модуляции поступает в блок базы данных для сравнения с данными базы и определения модели вертолета на основе анализа. Результаты анализа выводятся на индикатор.
Недостатком указанного способа является низкая вероятность обнаружения вертолета из-за малого уровня сигнала, отраженного от лопастей, и искажений амплитудной модуляции при обработке сигнала.
Наиболее близким по технической сущности является «Способ измерения угла сноса летательного аппарата бортовой радиолокационной станцией (БРЛС)» [RU 2660159, опубликовано 05.07.2018, МПК G01S 13/60], заключающийся в том, что осуществляют когерентное излучение сигнала одним лучом на передачу, перекрывающим по ширине лучи на прием, формируют антенной БРЛС на прием два независимых луча, разнесенных по азимуту, когерентно принимают импульсные сигналы, отраженные от земной поверхности, в процессе сканирования двумя лучами земной поверхности по азимуту в переднем секторе обзора относительно строительной оси летательного аппарата-носителя БРЛС. Кроме того принятые сигналы стробируют по дальности, осуществляют аналого-цифровое преобразование сигналов, когерентно накапливают сигналы принятые во всем секторе обзора, определяют и компенсируют временную задержку между сигналами, принятыми по каждому независимому лучу, отраженными от одного и того же участка земной поверхности. Определяют между скомпенсированными сигналами усредненную по стробам дальности и излученным импульсам сигналов разность фаз, фиксируют сигналы, величина усредненной разности фаз которых меняет знак на противоположный, определяют направление на участок земной поверхности, от которого были приняты эти сигналы. Угол сноса определяют как угол между этим направлением и строительной осью летательного аппарата-носителя БРЛС в горизонтальной плоскости относительно земной поверхности.
Недостатком указанного способа является невозможность обнаружения вертолетов на фоне подстилающей поверхности.
Техническим результатом предлагаемого изобретения является повышение вероятности обнаружения вертолетов на фоне подстилающей поверхности.
Технической проблемой решаемой предлагаемым изобретением является создание способа обнаружения вертолетов с высокой вероятностью для реализации в бортовых радиолокационных станциях летательных аппаратов.
Сущность изобретения заключается в том, что в процессе сканирования в заданном секторе обзора лучом диаграммы направленности антенны (ДНА) на передачу когерентно излучают импульсный сигнал, принимают отраженный от земной поверхности импульсный сигнал двумя независимыми лучами ДНА на прием, разнесенными по азимуту, причем луч ДНА на передачу перекрывает по ширине лучи на прием. Принятые по каждому лучу ДНА сигналы стробируют по дальности, осуществляют их аналого-цифровое преобразование, когерентно накапливают принятые сигналы во всем секторе обзора, определяют и компенсируют временную задержку между сигналами, принятыми по каждому независимому лучу, отраженными от одного и того же участка земной поверхности.
Новым в заявляемом способе является то, что после завершения накопления сигналов из них формируют два массива отсчетов сигналов, определяют крутизну частотной модуляции накопленных сигналов, а компенсацию временной задержки между отсчетами массивов сигналов осуществляют одновременно с устранением частотной модуляции сигналов, путем их гетеродинирования. Преобразуют скомпенсированные массивы сигналов в частотную область, определяют разность фаз между преобразованными в частотную область массивами сигналов для всех частот и стробов дальности, рассчитывают пороговое значение разности фаз по всем отсчетам массивов сигналов. При превышении разностью фаз порогового значения фиксируют наличие движущейся цели в отсчете сигнала на соответствующей частоте и в соответствующем стробе дальности. При обнаружении в одном стробе дальности групповой движущейся цели с одинаковым шагом по частоте между отдельными движущимися целями, фиксируют величину шага по частоте, повторяют вышеописанные операции N циклов, где N целое число большее единицы, при обнаружении групповой движущейся цели в одном стробе дальности и совпадении величины шага по частоте между отдельными движущимися целями во всех N циклах, считают обнаруженную групповую движущуюся цель вертолетом. Преобразование массивов сигналов в частотную область осуществляют быстрым преобразованием Фурье. Два независимых луча диаграммы направленности антенны на прием разнесены по азимуту на величину 1-3 ширины луча по азимуту. Пороговое значение разности фаз рассчитывают как 1.5-2 среднеквадратических отклонения разности фаз между отсчетами массивов сигналов. Количество циклов N лежит в интервале от 3 до 6.
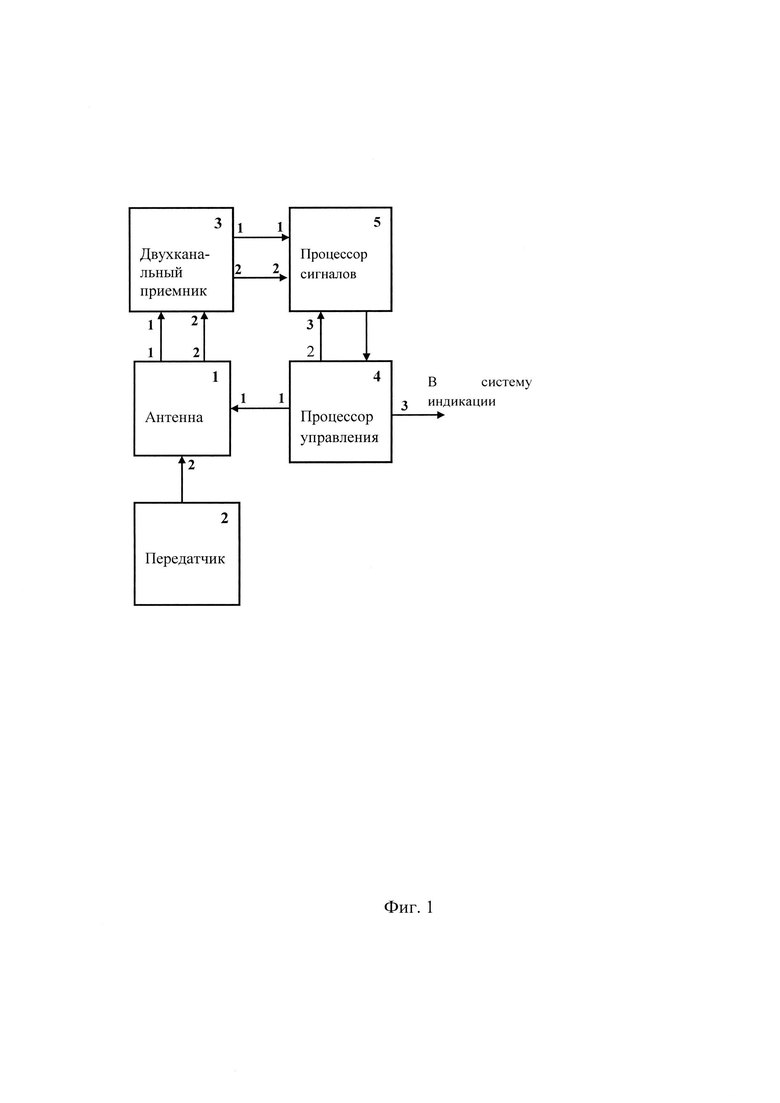
На Фиг. 1 представлена функциональная схема радиолокационной станции, осуществляющей способ.
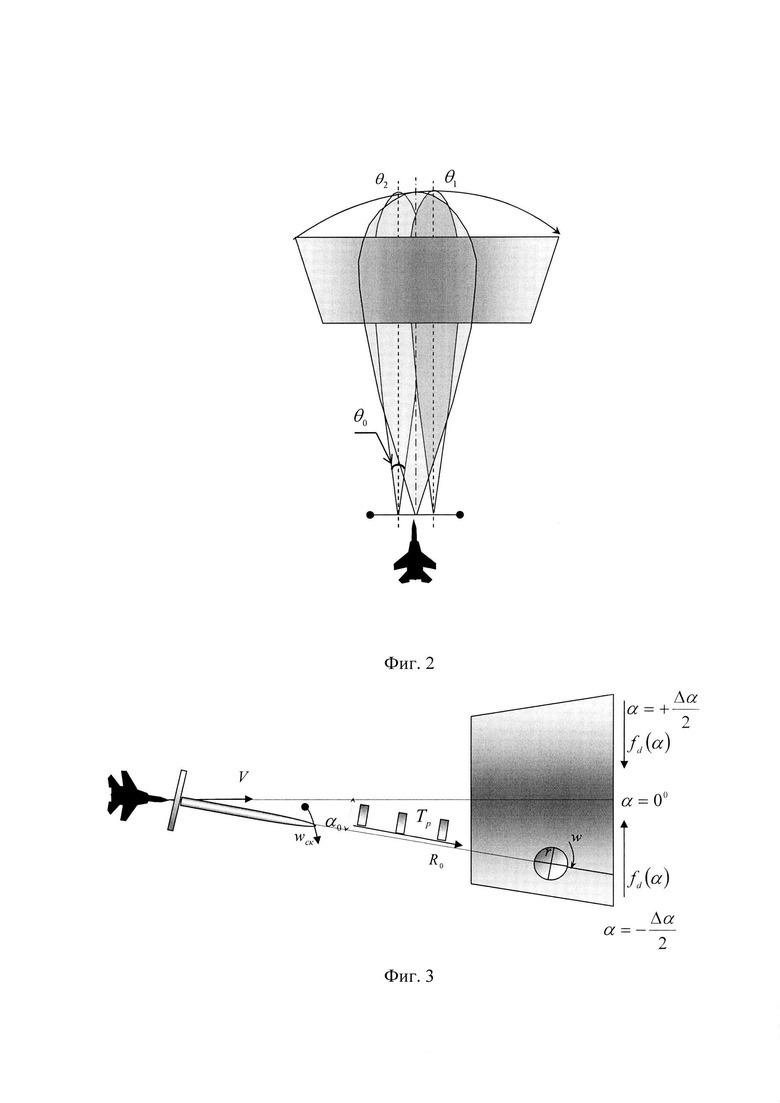
На Фиг. 2 схематично изображены приемные и передающие диаграммы направленности антенны.
На Фиг. 3 схематично изображен процесс сканирования земной поверхности и облучения вертолета.
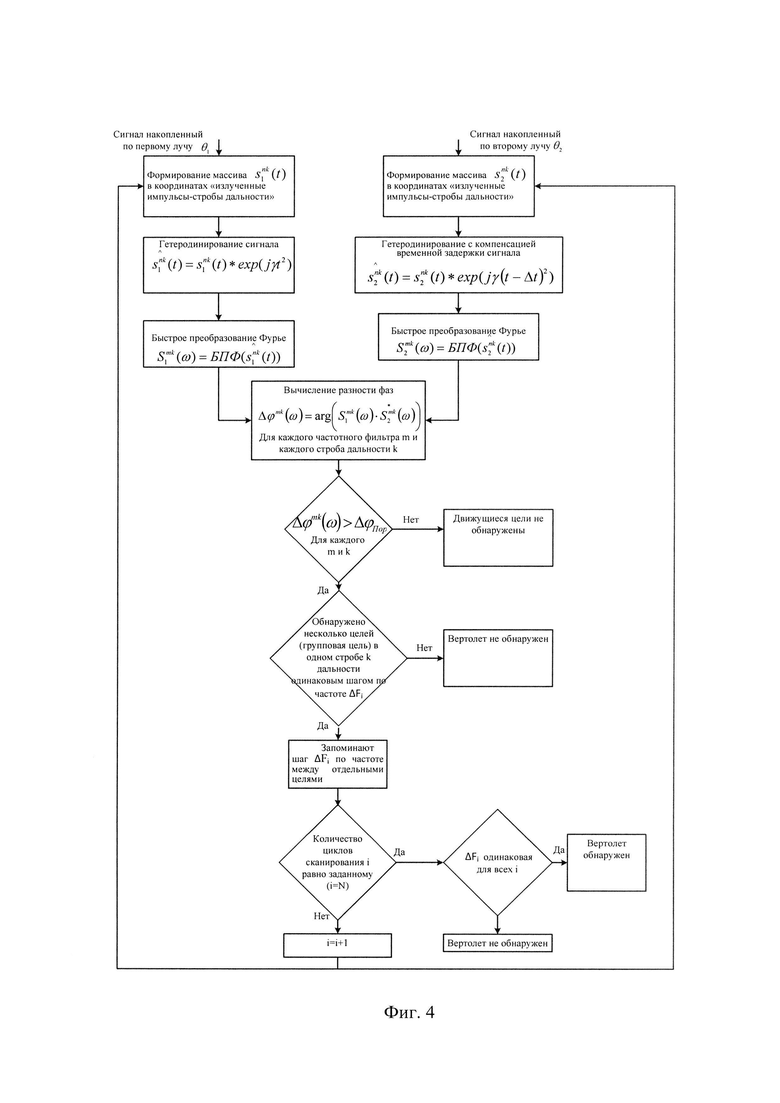
На Фиг. 4 приведена блок-схема алгоритма обработки накопленного радиолокационного сигнала.
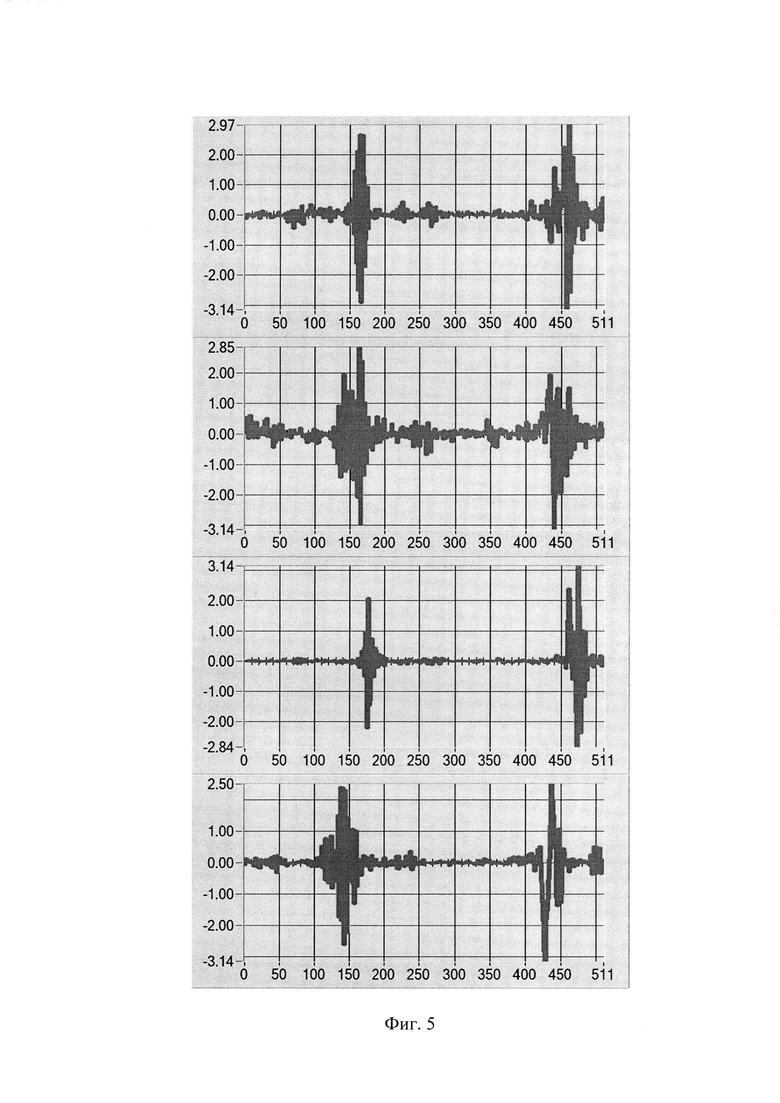
На Фиг. 5 приведена серия графиков экспериментальной зависимости разности фаз сигналов целей от номера частотного фильтра.
Способ обнаружения наземных движущихся целей бортовой радиолокационной станцией может быть реализован, например, в импульсно-доплеровской БРЛС в режиме работы воздух-поверхность состоящей из антенны (1), передатчика (2), двухканального приемника (3), процессора управления (4), процессора сигналов (5). Первый выход процессора управления (4) соединен с первым входом антенны (1), второй выход процессора управления (4) соединен с третьим входом процессора сигналов (5). Выход передатчика (2) соединен со вторым входом антенны (1). Первый выход антенны (1) соединен с первым входом приемника (3), второй выход антенны (1) соединен со вторым входом приемника (3). Первый выход приемника (3) подключен к первому входу процессора сигналов (5), второй выход приемника (3) подключен ко второму входу процессора сигналов (5). Выход процессора сигналов (5) подключен к входу процессора управления (4). Третий выход процессора управления (4) является внешним выходом БРЛС.
Способ обнаружения вертолетов бортовой радиолокационной станцией работает следующим образом.
В ходе полета носитель БРЛС осуществляет поиск целей на фоне подстилающей поверхности, в том числе летящих и зависших вертолетов. Для этого процессор управления (4) задает параметры управления антенне (1) для просмотра соответствующей зоны обзора. Антенна (1) формирует широкую однолучевую диаграмму направленности (ДНА) на передачу, а на прием ДНА, состоящую из двух узких лучей разнесенных по азимуту, например на величину 1.5θ0 где θ0 ширина луча ДНА по азимуту, и выставляет ее на одну из границ зоны обзора, например на левую границу. При этом ширина однолучевой ДНА на передачу больше либо равна ширине двухлучевой ДНА на прием, чтобы обеспечить их перекрытие. Пусть центр зоны обзора установлен по курсу носителя БРЛС. После установки лучи ДНА начинают плавно перемещаться слева направо в азимутальной плоскости, проводя сканирование зоны обзора по азимуту (процесс показан на Фиг. 2) с постоянной угловой скоростью wск. В процессе обзора антенна (1) излучает, сформированный передатчиком (2), когерентный импульсный радиолокационный сигнал с постоянным периодом повторения Тр.
Отраженный от подстилающей поверхности сигнал принимается антенной (1) независимо по каждому из двух лучей θ1 и θ2 (Фиг. 2). С первого и второго выходов антенны (1) сигналы поступают на первый и второй входы двухканального приемника (3), где осуществляется обработка сигналов: сигналы, принятые по каждому лучу, стробируют по дальности, осуществляют их аналого-цифровое преобразование. Затем когерентно накапливают сигналы в процессоре сигналов (5). Процесс излучения/приема радиолокационного сигнала осуществляется в ходе сканирования лучами ДНА подстилающей поверхности в заданном секторе обзора по закону, заданному процессором управления (4). По окончании сканирования завершается накопление сигналов в процессоре сигналов (5) по команде, поступающей на его третий вход со второго выхода процессора управления (4).
Далее после завершения когерентного накопления сигналов s1(t) и s2(t) в процессоре сигналов (5) запускается обработка сигналов по команде, поступающей с процессора управления (4).
В процессоре сигналов (5) формируют два массива отсчетов сигналов в координатах «излученные импульсы - дальность»  и
и  где n - количество излученных импульсов, k - количество стробов дальности. Количество отсчетов сигнала определяется количеством излученных импульсов за время сканирования и количеством стробов дальности. Далее осуществляют сигнальную обработку в процессоре сигналов (5) в соответствии с алгоритмом, приведенным на Фиг. 4.
где n - количество излученных импульсов, k - количество стробов дальности. Количество отсчетов сигнала определяется количеством излученных импульсов за время сканирования и количеством стробов дальности. Далее осуществляют сигнальную обработку в процессоре сигналов (5) в соответствии с алгоритмом, приведенным на Фиг. 4.
Относительно одной точки на подстилающей поверхности между сигналами s1(t) и s2(t), принятыми по двум независимым лучам, присутствует задержка  где Δθ - угол, на который разнесены лучи θ1 и θ2 по азимуту, а wск - скорость сканирования ДНА БРЛС. Для обработки сигналов необходимо компенсировать эту временную задержку между отсчетами сигналов. Так же в сигналах s1(t) и s2(t) присутствует частотная модуляция, которую необходимо устранить. Для этого осуществляют гетеродинирование сигналов функцией, в которой параметрами являются крутизна частотной модуляции принятых сигналов и временная задержка. В качестве гетеродинирующей функции, можно использовать комплексные функции с квадратичной зависимостью от времени. Гетеродинирование осуществляется комплексной сверткой сигнала и гетеродинирующей функции по формуле:
где Δθ - угол, на который разнесены лучи θ1 и θ2 по азимуту, а wск - скорость сканирования ДНА БРЛС. Для обработки сигналов необходимо компенсировать эту временную задержку между отсчетами сигналов. Так же в сигналах s1(t) и s2(t) присутствует частотная модуляция, которую необходимо устранить. Для этого осуществляют гетеродинирование сигналов функцией, в которой параметрами являются крутизна частотной модуляции принятых сигналов и временная задержка. В качестве гетеродинирующей функции, можно использовать комплексные функции с квадратичной зависимостью от времени. Гетеродинирование осуществляется комплексной сверткой сигнала и гетеродинирующей функции по формуле:


Где t - время, j - мнимая единица, γ - крутизна частотной модуляции сигнала, Δt - временная задержка между сигналами  и
и  - результирующие сигналы.
- результирующие сигналы.
Далее массивы сигналов 
 преобразуют из временной области в частотную. Для этого в процессоре сигналов (5) над ними осуществляют быстрое преобразование Фурье:
преобразуют из временной области в частотную. Для этого в процессоре сигналов (5) над ними осуществляют быстрое преобразование Фурье:

Массивы отсчетов сигналов 
 формируются в координатах «частота-стробы дальности», где m - номер частотного фильтра, k - номер строба дальности.
формируются в координатах «частота-стробы дальности», где m - номер частотного фильтра, k - номер строба дальности.
Далее вычисляют разность фаз между отсчетами массивов сигналов 
 Для этого в процессоре сигналов (5) осуществляют поэлементное перемножение отсчетов сигнала
Для этого в процессоре сигналов (5) осуществляют поэлементное перемножение отсчетов сигнала  и комплексно-сопряженных отсчетов сигнала
и комплексно-сопряженных отсчетов сигнала  например, по следующему соотношению:
например, по следующему соотношению:
Далее осуществляют обработку полученного массива разностей фаз Δϕmk(ω). На первом этапе обработки массива Δϕmk(ω) рассчитывают пороговое значение разности фаз сигналов. Для этого рассчитывают среднеквадратическое отклонение (СКО) разности фаз массива Δϕmk(ω) и в качестве порогового значения принимают, например 1.5 СКО. Затем в процессоре сигналов (5) полученные значения разности фаз Δϕmk(ω) на всех частотах и во всех стробах дальности сравнивают с пороговым значением. Для неподвижной поверхности и объектов на ее фоне Δϕmk(ω)≈0°, а для движущихся объектов: Δϕmk(ω)≈2πƒДОΔt, где ƒДО - доплеровская частота движущегося объекта.
Определяемая разность фаз между сигналами движущихся целей возникает за счет изменения азимута движущейся цели за время задержки между двумя лучами ДНА Δt, в отличие от неподвижной цели и подстилающей поверхности. При превышении разностью фаз порогового значения для соответствующих частоты и строба дальности фиксируют наличие движущейся цели. Далее информация о целях передается в процессор управления (4) для дальнейшего анализа.
При обнаружении в одном стробе дальности групповой цели (нескольких целей) с одинаковым шагом по частоте ΔFi между отдельными целями в процессоре управления (4) запускается проверка принадлежности целей к классу «вертолет». В процессоре управления (4) заносится в память величина шага по частоте ΔFi между целями в герцах либо в частотных фильтрах, где i - номер цикла сканирования от 1 до N, где N целое число большее единицы - общее количество циклов сканирования. Затем повторяют описанное выше сканирование зоны обзора и обнаружение целей. При повторном обнаружении групповой цели в одном стробе дальности сравнивают величину шага по частоте между целями с запомненным значением. При этом положение целей по частоте (номера частотных фильтров в которых обнаружены цели) может измениться из-за изменения ракурса наблюдения за время пролета носителя БРЛС.
БРЛС повторяет несколько циклов сканирования, например N=3,4 цикла. При обнаружении групповой цели в каждом цикле сканирования с одинаковым шагом по частоте между целями ΔFi данную групповую цель считают вертолетом. Далее информация об обнаружении вертолета из процессора управления (5) поступает в систему индикации для отображения пилоту.
На фигуре 5 приведена серия графиков экспериментальной зависимости разности фаз сигналов, отраженных от вертолета Ми-8, от номера частотного фильтра в одном стробе дальности.
На графиках видны групповые (парные) цели с одинаковым шагом по частоте (одинаковой разницей числа частотных фильтров между двумя целями) и этот шаг постоянен для всех четырех циклов сканирования. Поясним принцип обнаружения такой групповой цели при облучении вертолета на фоне подстилающей поверхности.
При облучении будем считать, что высота полета (висения) h, много меньше высоты полета носителя БРЛС.
Наблюдение за объектом на дальности R0 при угле падения  и скорости полета носителя V осуществляется в течении времени t=0…T, Т≥Тс
и скорости полета носителя V осуществляется в течении времени t=0…T, Т≥Тс  - время сканирования зоны обзора, θ0 - ширина луча, wск - скорость сканирования луча ДНА, Δα - ширина зоны обзора (α=0 - направление вектора скорости носителя). Схематично процесс облучения вертолета показан на Фиг. 3.
- время сканирования зоны обзора, θ0 - ширина луча, wск - скорость сканирования луча ДНА, Δα - ширина зоны обзора (α=0 - направление вектора скорости носителя). Схематично процесс облучения вертолета показан на Фиг. 3.
Рассмотрим случай, когда объект не движется (зависший вертолет), а по орбите движется его часть (например, крепление винта или элемент сложной втулки винта). Представим эту часть в виде точечного отражателя (ТО), движущегося по орбите с круговой скоростью w и находящегося на расстоянии r относительно оси вращения (Фиг. 3).
Дальность от фазового центра антенны БРЛС (ФЦА) до вращающегося ТО будет изменяться следующим образом:
r(t, w, r)≈R0(t)-rsin(q0)cos(wt+φ0),
где R0(t) - дальность от ФЦА до оси вращения основного винта вертолета, φ0 - начальный угол вращения.
Отметим некоторые свойства этого кругового вращения:
1. При ϕ=wt+φ0=0+πk, k=0,1.. Соответствует положению креплений винта сонаправленного с направлением движения носителя БРЛС.
r(t, w, r)≈R0(t)-(-1)krsin(q0),

2. При  k=0,1…, Соответствует положению креплений винта вертолета перпендикулярному направлению движения носителя БРЛС.
k=0,1…, Соответствует положению креплений винта вертолета перпендикулярному направлению движения носителя БРЛС.
r(t, w, r)≈R0(t),
где νr0, ar0 - радиальная скорость и ускорение относительно оси вращения.
В первом случае изменение дальности и ее производных приведет к некоторому смещению отметки по дальности и искажению сигнала из-за невозможности скомпенсировать их изменение за счет гетеродинирования отраженного сигнала (например при  (Вертолет Ми-8) - из-за дополнительного радиального ускорения происходит искажение структуры отраженного сигнала).
(Вертолет Ми-8) - из-за дополнительного радиального ускорения происходит искажение структуры отраженного сигнала).
Во втором случае, в результате гетеродинирования отраженного сигнала, значительно (до ƒdo≈80…160 Гц при r≈8…16 см (размер крепления винта) смещается отметка ТО по доплеровской частоте, а искажение сигнала отраженного от вращающегося элемента крепления винта будет незначительным.
Таким образом, при движении ТО по окружности, выделяются два доминирующих направления, ортогональных линии визирования 
 где обеспечиваются условия обнаружения сигнала отраженного от крепления винта. Именно разности фаз сигналов, отраженных от крепления винта вертолета на этих направлениях представлены на Фиг. 5.
где обеспечиваются условия обнаружения сигнала отраженного от крепления винта. Именно разности фаз сигналов, отраженных от крепления винта вертолета на этих направлениях представлены на Фиг. 5.
На других направлениях, а тем более ϕ=0, ϕ=π можно считать, что отраженный сигнал полностью искажается даже на малых интервалах накопления сигнала.
Таким образом, осуществляется обнаружение сигналов, отраженных от вращающихся элементов крепления или втулки винта вертолета, и их анализ, позволяющий сделать вывод о том, что обнаруженные сигналы отражены именно от вертолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения наземных движущихся целей бортовой радиолокационной станцией | 2018 |
|
RU2691771C1 |
| Способ определения скорости и направления движения наземных объектов бортовой радиолокационной станцией с антенной решеткой | 2021 |
|
RU2786678C1 |
| Способ определения угла сноса летательного аппарата бортовой радиолокационной станцией | 2017 |
|
RU2660159C1 |
| Способ картографирования земной поверхности бортовой радиолокационной станцией с антенной решеткой | 2022 |
|
RU2798822C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией | 2023 |
|
RU2806651C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ МАЛОВЫСОТНЫХ ВОЗДУШНЫХ И НАЗЕМНЫХ ЦЕЛЕЙ В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2007 |
|
RU2329520C1 |
| Способ картографирования земной поверхности бортовой радиолокационной станцией в переднем секторе обзора | 2017 |
|
RU2640406C1 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ НАБЕГОВ СИГНАЛА В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ И БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2271019C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ И ДВИЖУЩИХСЯ НАЗЕМНЫХ ЦЕЛЕЙ В КОГЕРЕНТНОЙ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2005 |
|
RU2298809C9 |
Изобретение относится к области радиолокации и может быть использовано в авиационных бортовых радиолокационных станциях (БРЛС) для обнаружения летящего или зависшего вертолета на фоне подстилающей поверхности. Достигаемый технический результат – повышение вероятности обнаружения вертолетов на фоне подстилающей поверхности. Указанный результат достигается за счет того, что в процессе сканирования в заданном секторе обзора лучом диаграммы направленности антенны (ДНА) на передачу когерентно излучают импульсный сигнал, принимают отраженный от земной поверхности импульсный сигнал двумя независимыми лучами ДНА на прием, разнесенными по азимуту, принятые по каждому лучу ДНА сигналы стробируют по дальности, осуществляют их аналого-цифровое преобразование, когерентно накапливают во всем секторе обзора, формируют два массива отсчетов сигналов, определяют крутизну частотной модуляции накопленных сигналов, определяют и компенсируют временную задержку между сигналами, принятыми по каждому независимому лучу, отраженными от одного и того же участка земной поверхности одновременно с устранением частотной модуляции сигналов, путем их гетеродинирования, преобразуют скомпенсированные массивы сигналов в частотную область, определяют разность фаз между преобразованными в частотную область массивами сигналов для всех частот и стробов дальности, рассчитывают пороговое значение разности фаз по всем отсчетам массивов сигналов, сравнивают значения разности фаз для всех частот и стробов дальности с пороговым значением, при превышении разностью фаз порогового значения фиксируют наличие движущейся цели в отсчете сигнала на соответствующей частоте и в соответствующем стробе дальности, при обнаружении в одном стробе дальности групповой движущейся цели с одинаковым шагом по частоте между отдельными движущимися целями фиксируют величину шага по частоте, повторяют вышеописанные операции N циклов, где N - целое число, большее единицы, при обнаружении групповой движущейся цели в одном стробе дальности и совпадении величины шага по частоте между отдельными движущимися целями во всех N циклах считают обнаруженную групповую движущуюся цель вертолетом. 4 з.п. ф-лы, 5 ил.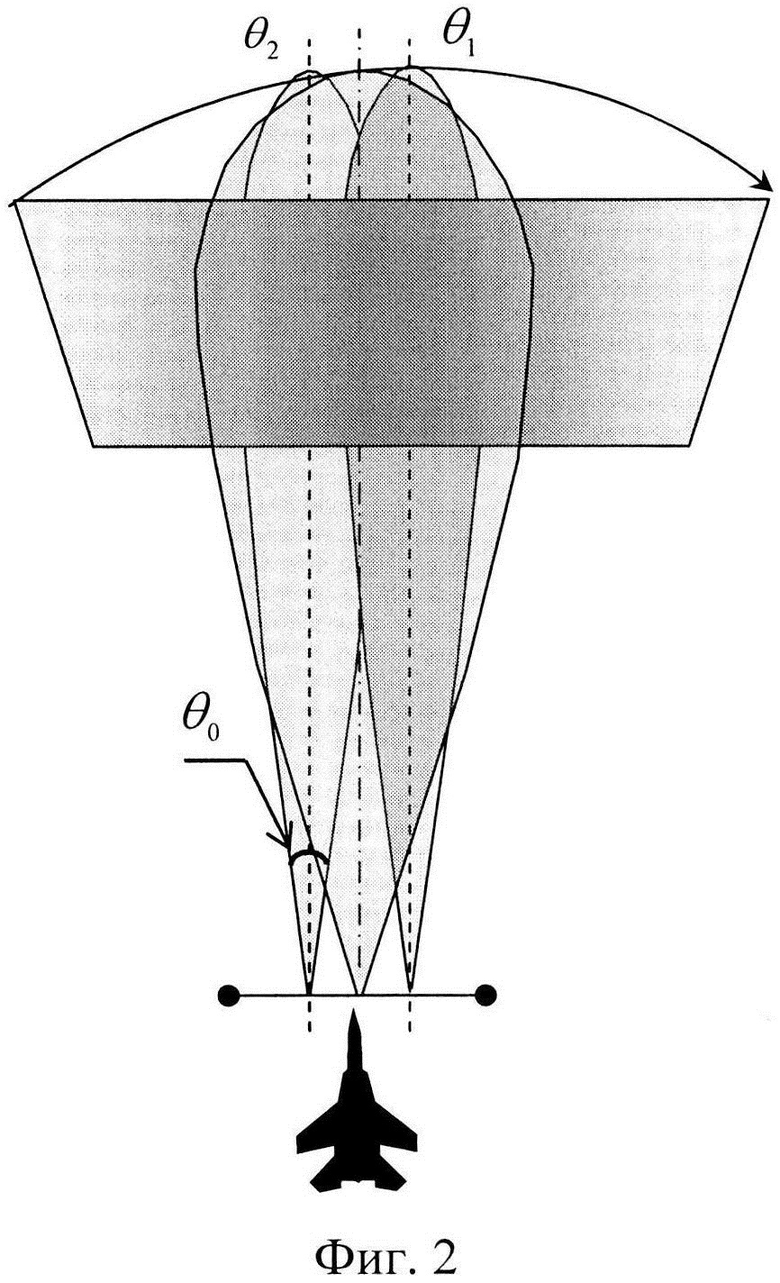
1. Способ обнаружения вертолетов бортовой радиолокационной станцией, заключающийся в том, что в процессе сканирования в заданном секторе обзора лучом диаграммы направленности антенны (ДНА) на передачу когерентно излучают импульсный сигнал, принимают отраженный от земной поверхности импульсный сигнал двумя независимыми лучами ДНА на прием, разнесенными по азимуту, причем луч на передачу перекрывает по ширине лучи на прием, принятые по каждому лучу ДНА сигналы стробируют по дальности, осуществляют их аналого-цифровое преобразование, когерентно накапливают принятые сигналы во всем секторе обзора, определяют и компенсируют временную задержку между сигналами, принятыми по каждому независимому лучу, отраженными от одного и того же участка земной поверхности, отличающийся тем, что после завершения накопления сигналов из них формируют два массива отсчетов сигналов, определяют крутизну частотной модуляции накопленных сигналов, а компенсацию временной задержки между отсчетами массивов сигналов осуществляют одновременно с устранением частотной модуляции сигналов путем их гетеродинирования, преобразуют скомпенсированные массивы сигналов в частотную область, определяют разность фаз между преобразованными в частотную область массивами сигналов для всех частот и стробов дальности, рассчитывают пороговое значение разности фаз по всем отсчетам массивов сигналов, при превышении разностью фаз порогового значения фиксируют наличие движущейся цели в отсчете сигнала на соответствующей частоте и в соответствующем стробе дальности, при обнаружении в одном стробе дальности групповой движущейся цели с одинаковым шагом по частоте между отдельными движущимися целями фиксируют величину шага по частоте, повторяют вышеописанные операции N циклов, где N - целое число, большее единицы, при обнаружении групповой движущейся цели в одном стробе дальности и совпадении величины шага по частоте между отдельными движущимися целями во всех N циклах считают обнаруженную групповую движущуюся цель вертолетом.
2. Способ обнаружения вертолетов бортовой радиолокационной станцией по п. 1, отличающийся тем, что преобразование массивов сигналов в частотную область осуществляют быстрым преобразованием Фурье.
3. Способ обнаружения вертолетов бортовой радиолокационной станцией по п. 1, отличающийся тем, что два независимых луча диаграммы направленности антенны на прием разнесены по азимуту на величину 1-3 ширины луча по азимуту.
4. Способ обнаружения вертолетов бортовой радиолокационной станцией по п. 1, отличающийся тем, что пороговое значение разности фаз рассчитывают как 1.5-2 среднеквадратических отклонения разности фаз между отсчетами массивов сигналов.
5. Способ обнаружения вертолетов бортовой радиолокационной станцией по п. 1, отличающийся тем, что количество циклов N лежит в интервале от 3 до 6.
| Способ определения угла сноса летательного аппарата бортовой радиолокационной станцией | 2017 |
|
RU2660159C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ МАЛОВЫСОТНЫХ ВОЗДУШНЫХ И НАЗЕМНЫХ ЦЕЛЕЙ В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2007 |
|
RU2329520C1 |
| Устройство для приготовления и заливки люминофорной суспензии | 1960 |
|
SU141506A1 |
| МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2006 |
|
RU2319173C1 |
| US 6137439 A, 24.10.2003 | |||
| JP 2001021642 A, 26.01.2001 | |||
| WO 2008105892 A3, 05.02.2009. | |||

