Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству помощи вождению транспортного средства и к способу помощи вождению транспортного средства, в которых автоматический режим вождения и режим вождения вручную являются переключаемыми.
Уровень техники
[0002] Традиционно, например, одна технология управления скоростью транспортного средства или углом поворота рулевого колеса на основе информации от различных датчиков для автономного движения включает в себя технологию, описанную в патентной литературе 1. В этой технологии, когда автоматический режим вождения, в котором транспортное средство движется автономно, и режим вождения вручную, в котором водитель вручную управляет транспортным средством, переключаются, переключение режима вождения сигнализируется водителю посредством отображения предупреждения, звука, вибрации сиденья или т.п.
Список библиографических ссылок
Патентная литература
[0003] PLT 1: JP H09-161196 A
Сущность изобретения
Техническая задача
[0004] В технологии, которая описана в патентной литературе 1, однако, переключение режима вождения сообщается водителю посредством отображения предупреждения, звука, вибрации сиденья или т.п. Следовательно, водителю трудно понимать, относительно чего предупреждение намерено уведомлять.
Таким образом, настоящее изобретение имеет своей задачей предоставление устройства помощи вождению транспортного средства и способ помощи вождению транспортного средства, посредством которых водителю легко понимать переключение режима вождения.
Решение задачи
[0005] Для того чтобы решить вышеописанную задачу, согласно одному аспекту настоящего изобретения, конфигурируется возможность переключения между автоматическим режимом вождения для выполнения автоматического управления движением для автоматической работы поворачивающего механизма независимо от действия руления водителя и режимом вождения вручную для работы поворачивающего механизма в зависимости от действия руления водителя.
Затем угол наклона водительского сиденья в автоматическом режиме вождения задается, чтобы быть больше угла наклона водительского сиденья в режиме вождения вручную.
Положительные эффекты изобретения
[0006] Согласно другому аспекту настоящего изобретения, угол наклона водительского сиденья изменяется в зависимости от того, является ли режим вождения автоматическим режимом вождения или режимом вождения вручную. В этой ситуации, поскольку угол наклона водительского сиденья в автоматическом режиме вождения больше угла наклона водительского сиденья в режиме вождения вручную, представляется возможным для водителя понимать переключение режима вождения простым образом.
Краткое описание чертежей
[0007] Фиг. 1 – это вид, иллюстрирующий функции транспортного средства, имеющего устройство помощи вождению транспортного средства, в одном варианте осуществления настоящего изобретения;
Фиг. 2 – это вид сбоку, иллюстрирующий водительское сиденье транспортного средства;
Фиг. 3A и фиг. 3B – это виды, иллюстрирующие позы вождения в автоматическом режиме вождения и режиме вождения вручную;
Фиг. 4 – это блок-схема последовательности операций, иллюстрирующая процедуру процесса управления позой вождения;
Фиг. 5 – это вид, иллюстрирующий рекомендованную позу вождения вручную;
Фиг. 6A и фиг. 6B – это виды, иллюстрирующие соотношения между стабильностью руления и усилием давления при рулении;
Фиг. 7 – это вид, иллюстрирующий соотношения между физическими особенностями и точностью действия;
Фиг. 8 – это вид, иллюстрирующий рекомендованную позу автоматического вождения;
Фиг. 9 – это вид, иллюстрирующий соотношение между углом в тазобедренных суставах и комфортной позой;
Фиг. 10 – это вид, иллюстрирующий другой пример устройства помощи вождению транспортного средства;
Фиг. 11 – это вид, иллюстрирующий еще один пример устройства помощи вождению транспортного средства; и
Фиг. 12 – это вид, иллюстрирующий дополнительный другой пример устройства помощи вождению транспортного средства.
Подробное описание вариантов осуществления
[0008] Далее в данном документе варианты осуществления настоящего изобретения будут описаны со ссылкой на прилагаемые чертежи.
(Первый вариант осуществления)
(Конфигурация)
Фиг. 1 – это вид, иллюстрирующий функции транспортного средства, имеющего устройство помощи вождению транспортного средства, в настоящем варианте осуществления.
На чертеже ссылочный номер 101 является устройством обнаружения внешней обстановки движения, а ссылочный номер 102 является устройством определения состояния транспортного средства. Устройство 101 обнаружения внешней обстановки движения включает в себя, например, камеру, лазерный радар, GPS-датчик и т.п. и сконфигурировано, чтобы распознавать внешние ситуации движущегося транспортного средства, такие как расстояние от движущегося транспортного средства до переднего транспортного средства, местоположение движения транспортного средства и т.п. Информация о внешних ситуациях, которые были распознаны посредством устройства 101 обнаружения внешней обстановки движения, вводится в контроллер 103 автоматического движения.
[0009] Кроме того, устройство 102 определения состояния транспортного средства включает в себя G-датчик или датчик скорости транспортного средства, например, и сконфигурировано, чтобы обнаруживать информацию о текущем состоянии движения транспортного средства. Информация, обнаруженная посредством устройства 102 определения состояния транспортного средства, также вводится в контроллер 103 автоматического движения.
Контроллер 103 автоматического движения конфигурируется с помощью микрокомпьютера, включающего в себя CPU, память и т.п., например.
Контроллер 103 автоматического движения конфигурируется, чтобы определять внутренние и внешние ситуации транспортного средства на основе информации, принятой от устройства 101 обнаружения внешней обстановки движения и устройства 102 определения состояния транспортного средства, и затем выполнять автоматическое управление движением для управления углом поворота рулевого колеса или скоростью транспортного средства так, что транспортное средство движется автоматически в зависимости от результата определения.
[0010] Если быть точнее, контроллер 103 автоматического движения конфигурируется, чтобы получать ситуацию на полосе движения, местоположение транспортного средства и т.п. вместе с информацией о маршруте или условиях дорожного движения до места назначения, условиях на маршруте, таких как регулирование дорожного движения, или окружениях движения, включающих в себя другие транспортные средства, наличие или отсутствие препятствия и т.п., от устройства 101 обнаружения внешней обстановки движения и устройства 102 определения состояния транспортного средства. Затем контроллер 103 автоматического движения конфигурируется, чтобы вычислять путь движения на основе вышеописанных фрагментов информации и задавать угол поворота рулевого колеса или скорость транспортного средства, чтобы двигаться по пути движения. Когда существует впередиидущее транспортное средство впереди транспортного средства, контроллер 103 автоматического движения конфигурируется, чтобы выполнять автоматическое управление движением для поддержания расстояния до впередиидущего транспортного средства постоянным в зависимости от скорости транспортного средства, в диапазоне, который не превышает предварительно определенную скорость, заданную водителем в устройстве 110 задания скорости движения. С другой стороны, когда не существует впередиидущего транспортного средства, контроллер 103 автоматического движения конфигурируется, чтобы выполнять автоматическое управление движением для поддержания скорости, заданной в устройстве 110 задания скорости движения.
[0011] Кроме того, контроллер 103 автоматического движения конфигурируется, чтобы выводить инструкцию управления тормозом для автоматического управления движением актуатору 104 управления давлением тормозной жидкости или инструкцию управления акселератором для автоматического управления движением актуатору 105 управления степенью открытия дроссельной заслонки. Дополнительно, контроллер 103 автоматического управления конфигурируется, чтобы выводить инструкцию управления поворотом для автоматического управления движением актуатору 106 управления углом поворота.
Актуатор 104 управления давлением тормозной жидкости управляет тормозной системой 107, тогда как актуатор 105 управления степенью открытия дроссельной заслонки управляет устройством 108 акселератора. Кроме того, актуатор 106 управления углом поворота рулевого колеса управляет поворачивающим устройством 109. Таким образом, задействуя акселератор, тормоз или рулевое колесо автоматически, транспортное средство вынуждается двигаться автономно без действия вождения водителя.
[0012] Кроме того, переключатель 111 автоматического/ручного режима движения является переключателем, который может быть задействован водителем, и автоматический режим вождения, в котором автоматическое управление движением выполняется, и режим вождения вручную, в котором водитель вручную управляет транспортным средством, являются соответствующим образом переключаемыми.
Вышеописанное автоматическое управление движением находится в состоянии, когда водитель задействует переключатель 111 автоматического/ручного режима движения, чтобы указывать автоматический режим вождения, и выполняется, только когда контроллер 103 автоматического движения определяет, что автоматическое управление движением возможно, из различных фрагментов информации. При этом, ситуация, в которой автоматическое управление движением является невозможным, включает в себя изменение места назначения или пути движения по обстоятельствам водителя, внезапная остановка другого транспортного средства, внезапное изменение погоды или т.п.
[0013] Кроме того, в настоящем варианте осуществления, например, автоматическое управление движением выполняется на автомагистрали, а вождение вручную водителем выполняется на дороге общего пользования.
Дополнительно, контроллер 103 автоматического движения конфигурируется, чтобы предупреждать водителя и пассажиров из устройства 112 оповещения, такого как сирена или сигнальное устройство, в экстренном случае, или когда оповещение необходимо.
Кроме того, состояние управления посредством контроллера 103 автоматического движения вводится в контроллер 113 позы вождения из контроллера 103 автоматического движения. Контроллер 113 позы вождения конфигурируется, например, с помощью микрокомпьютера, включающего в себя CPU, память и т.п. Контроллер 113 позы вождения и контроллер 103 автоматического движения могут быть обычно реализованы на одном и том же компьютере.
[0014] Контроллер 113 позы вождения принимает входные данные угла наклона спинки сиденья для конкретного сиденья, обнаруженного посредством датчика 114 положения сиденья, и интервала скольжения в продольном направлении нижней поверхности сиденья для конкретного сиденья. В данном документе конкретное сиденье соответствует водительскому сиденью в режиме вождения вручную (далее в данном документе просто называемому водительским сиденьем).
Затем после обнаружения переключения между автоматическим вождением и вождением вручную, контроллер 113 позы вождения управляет положениями различных частей водительского сиденья, чтобы выполнять управление позой вождения для управления позой вождения водителя в позу в зависимости от режима вождения (далее в данном документе называемую рекомендованной позой вождения). Если быть точнее, контроллер 113 позы вождения конфигурируется, чтобы выводить управляющую инструкцию для регулировки угла наклона спинки сиденья для водительского сиденья и интервала скольжения нижней поверхности сиденья для водительского сиденья в продольном направлении транспортного средства актуатору 115 положения сиденья. Актуатор 115 положения сиденья конфигурируется, чтобы управлять каждой частью водительского сиденья 116.
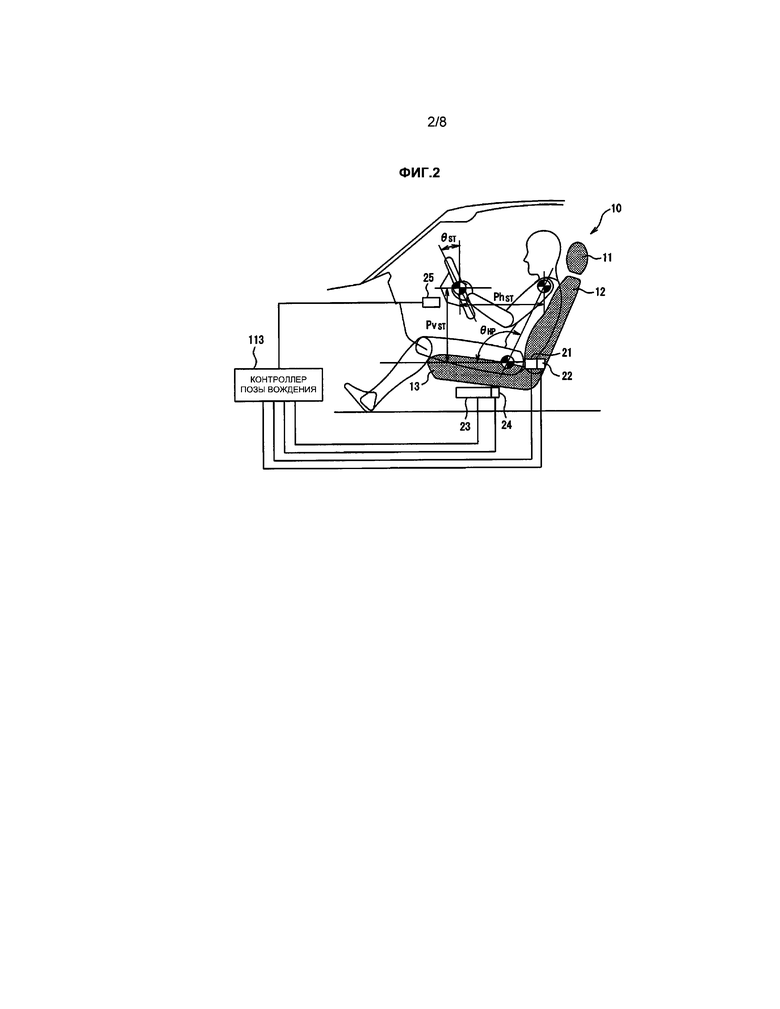
[0015] Фиг. 2 – это вид сбоку, иллюстрирующий водительское сиденье транспортного средства.
Как иллюстрировано на этой фиг. 2, водительское сиденье 10 включает в себя подголовник 11, спинку 12 сиденья и нижнюю часть 13 сиденья, которые включены в водительское сиденье 116 на фиг. 1. Спинка 12 сиденья способна наклоняться посредством наклоняющего мотора 21, и датчик 22 наклона конфигурируется, чтобы обнаруживать угол наклона спинки 12 сиденья. Кроме того, нижняя часть 13 сиденья является скользящей в продольном направлении транспортного средства посредством мотора 23 скольжения, и датчик 24 скольжения обнаруживает интервал скольжения нижней части 13 сиденья.
Здесь, актуатор 115 положения сиденья на фиг. 1 конфигурируется с помощью отклоняющего мотора 21 и мотора 23 скольжения. Кроме того, датчик 114 положения сиденья на фиг. 1 конфигурируется с помощью датчика 22 наклона и датчика 24 скольжения.
Дополнительно, актуатор 25 рулевого управления способен регулировать угол наклона рулевого колеса и телескопическое положение, соответственно.
[0016] Контроллер 113 позы вождения конфигурируется, чтобы регулировать угол θ HP в тазобедренных суставах, который является углом, составленным осью бедренной области водителя и туловищем, посредством возбуждения и управления наклоняющего мотора 21. Кроме того, контроллер 113 позы вождения конфигурируется, чтобы регулировать позиции рулевого колеса (продольную позицию PhST рулевого колеса, вертикальную позицию PvST рулевого колеса и угол θST поворота рулевого колеса), возбуждая и управляя мотором 23 скольжения и актуатором 25 рулевого управления.
Если быть точнее, контроллер 113 позы вождения конфигурируется, чтобы задавать параметр, когда спинка 12 сиденья поднимается так, что руки водителя могут доставать рулевое колесо, в режиме вождения вручную, в котором автоматическое управление движением с помощью контроллера 103 автоматического движения не выполняется, как иллюстрировано на фиг. 3A. Другими словами, водитель должен принять позу для вождения транспортного средства. Поза, иллюстрированная на фиг. 3A, предполагает быть позой вождения (рекомендованной позой вождения вручную), подходящей для режима вождения вручную.
[0017] С другой стороны, контроллер 113 позы вождения конфигурируется, чтобы делать спинку 14 сиденья ближе к горизонтальному положению, в автоматическом режиме вождения, в котором автоматическое управление движением с помощью контроллера 103 автоматического движения выполняется, как иллюстрировано на фиг. 3B. Другими словами, водитель должен принимать позу для передачи функций вождения транспортного средства на автоматическое управление движением (контроллер 103 автоматического движения). Такая поза, иллюстрированная на фиг. 3B, предполагает быть позой вождения (рекомендованной позой автоматического вождения), подходящей для автоматического режима вождения.
[0018] Фиг. 4 – это блок-схема последовательности операций, иллюстрирующая процедуру процесса управления позой вождения, которая должна выполняться посредством контроллера 113 позы вождения. Когда двигатель запускается, процесс управления позой вождения начинает свою работу и выполняется циклически в каждый предварительно определенный период дискретизации.
Сначала, на этапе S1, контроллер 113 позы вождения определяет, была или нет задана рекомендованная поза вождения, соответствующая для каждого режима вождения. Затем когда рекомендованная поза вождения не задана, обработка переходит к этапу S2, тогда как, когда рекомендованная поза вождения была задана, обработка переходит к этапу S8, который будет описан ниже.
[0019] На этапе S2 контроллер 113 позы вождения получает различные типы данных, необходимых для задания рекомендованной позы вождения, и обработка переходит к этапу S3. В настоящем варианте осуществления рекомендованная поза вождения задается в зависимости от размера тела водителя или персональной физической особенности водителя (далее в данном документе просто называемой физической особенностью). Кроме того, в качестве физической особенности, используется информация, представляющая физическую гибкость тела водителя. Таким образом, на этапе S2, например, получаются интервал скольжения сиденья и степень открытия двери водительского сиденья, позиция ног водителя и т.п., когда водитель садится в транспортное средство.
На этапе S3 контроллер 113 позы вождения оценивает размер тела водителя. Сначала, длина ног водителя оценивается с помощью модели физического размера, которая была сохранена заранее, на основе интервала скольжения сиденья, когда водитель садится в транспортное средство. Далее, длина рук водителя от плеча до кисти и рост водителя оцениваются из оцененной длины ног водителя с помощью модели физического размера.
[0020] На этапе S4 контроллер 113 позы вождения оценивает гибкость водителя. Гибкость представляет пластичность тела водителя. Когда гибкость является низкой, водитель имеет склонность к ограничениям по скручиванию верхней части тела, по поднимающим движениям плеч и т.п. При этом гибкость оценивается на основе, например, роста водителя, оцененного на этапе S3, степени открытия двери водительского сиденья и положения ноги водителя, когда водитель садится в транспортное средство. В настоящем варианте осуществления гибкость водителя классифицируется на три стандарта "низкая", "средняя" и "высокая".
На этапе S5 контроллер 113 позы вождения задает позу вождения вручную, которая является позой вождения в режиме вождения вручную. Здесь, поза вождения вручную является, как иллюстрировано на фиг. 5, позой вождения для приложения некоторого усилия T1 давления при рулении к рулевому колесу от рук водителя.
[0021] Фиг. 6A и фиг. 6B – это виды, иллюстрирующие различия в усилии давления при рулении между опытным водителем и неопытным водителем. Здесь, фиг. 6A иллюстрирует действие руления опытного водителя, а фиг. 6B иллюстрирует действие руления неопытного водителя.
Как иллюстрировано на фиг. 6A, в случае опытного водителя, усилие давления при рулении является сравнительно большим (усилие T1 нажатия), а кривая линия руления является плавной типа синусоиды, и понятно, что действие руления является устойчивым. С другой стороны, как иллюстрировано на фиг. 6B, в случае неопытного водителя, усилие давления при рулении является сравнительно небольшим (усилие нажатия T2 < T1), и действие руления является неустойчивым с множеством корректировок руления.
Таким образом, в настоящем варианте осуществления, для того, чтобы реализовывать устойчивое рулевое управление в режиме вождения вручную, поза вождения вручную задается в качестве позы вождения, в которой среднее усилие T1 давления при рулении опытного водителя добавляется к рулевому колесу от рук водителя. Настройки позы вождения выполняются посредством настройки параметров позы для угла θHP в тазобедренных суставах, продольной позиции PhST рулевого колеса, вертикальной позиции PvST рулевого колеса и угла θST поворота рулевого колеса.
[0022] Эти параметры позы (θHP, PhST, PvST и θST) для настройки позы вождения вручную сохраняются заранее для каждого размера тела. Затем на основе размера тела водителя, оцененного на этапе S3, получаются параметры позы для настройки позы вождения вручную, подходящие для размера тела водителя. Следует отметить, что для того, чтобы упрощать процесс настройки, размер тела может быть классифицирован в три стандарта "низкий", "средний" и "высокий", чтобы задавать параметры позы.
На этапе S6 контроллер 113 позы вождения корректирует позу вождения вручную, заданную на этапе S5, с помощью гибкости водителя, оцененной на этапе S4.
[0023] Поскольку фиг. 7 иллюстрирует соотношение между гибкостями и точностью действия, когда гибкость является низкой, и поза водителя для вождения располагается ближе к рулевому колесу, чем физически стандартная позиция, известно, что точность действия выше. Кроме того, в позиции, где поза водителя для вождения находится дальше от рулевого колеса, чем физически стандартная позиция, точность действия почти такая же, что и в физически стандартной позиции.
В отличие от этого, когда гибкость является обычной или высокой, точность действия является высокой в обоих случаях, когда поза водителя для вождения позиционируется в физической стандартной позиции, и когда поза водителя для вождения позиционируется дальше от рулевого колеса, чем физическая стандартная позиция. Кроме того, в случае, когда поза водителя для вождения находится ближе к рулевому колесу, чем физическая стандартная позиция, точность действия является более низкой. Однако, точность действия в этом случае является почти такой же, что и в случае, когда гибкость является низкой, и поза водителя для вождения находится ближе к рулевому колесу, чем физическая стандартная позиция.
[0024] Таким образом, точность действия различается в зависимости от особенности каждого человека. Таким образом, в настоящем варианте осуществления, принимая во внимание гибкость, которая является особенностью тела отдельного человека, поза вождения вручную корректируется, чтобы больше улучшать точность действия.
Если быть точнее, в случае, когда гибкость водителя является "средней" или "высокой", поза вождения вручную, заданная на этапе S5, задается в рекомендованную позу вождения в режиме вождения вручную без изменения. С другой стороны, в случае, когда гибкость водителя является "низкой", продольная позиция PhST руления для позы вождения вручную, заданной на этапе S5, корректируется, чтобы быть ближе к рулевому колесу, и задается в рекомендованную позу вождения в режиме вождения вручную. Здесь, величина корректировки продольной позиции PhST рулевого колеса задается равной или более короткой, чем 40 мм, при которой водитель может задействовать рулевое колесо без ухудшения точности действия.
[0025] На этапе S7 контроллер 113 позы вождения задает рекомендованную позу вождения в автоматическом режиме вождения. Здесь, поза автоматического вождения задается в позу вождения так, что угол θHP в тазобедренных суставах является тупым углом, как иллюстрировано на фиг. 8. В автоматическом режиме вождения водитель не должен принимать позу вождения. Поэтому, поза автоматического вождения задается, придавая важность комфортной позе (небольшой физической нагрузке).
Как иллюстрировано на фиг. 9, понятно, что комфортная поза имеет высокую корреляцию с углом θHP в тазобедренных суставах. Величина давления на живот водителя меньше, когда угол θHP в тазобедренных суставах больше. Однако, если существует часть, где мышечная нагрузка для поддержания тела увеличивается, или положение головы ниже горизонтальной линии, на мышечную нагрузку и кровообращение будет оказываться отрицательное влияние, и нагрузка будет прикладываться к телу. Поэтому, существует ограничение на размер угла θHP в тазобедренных суставах, который предоставляет возможность водителю принимать комфортную позу.
[0026] В настоящем варианте осуществления, принимая во внимание величину давления на живот и мышечную нагрузку для физической поддержки, определяется, что поза, в которой угол θHP в тазобедренных суставах слегка меньше 180 градусов, является позой, в которой величина физической нагрузки водителя является минимальной. Затем эта поза задается в качестве позы автоматического вождения.
На этапе S8 контроллер 113 позы вождения определяет, выполняется или нет автоматическое управление движением в контроллере 103 автоматического движения. Другими словами, контроллер 113 позы вождения определяет, является или нет режим вождения автоматическим режимом вождения. Затем в автоматическом режиме вождения, обработка переходит к этапу S9, а в режиме вождения вручную обработка переходит к этапу S11, который будет описан ниже.
[0027] На этапе S9 контроллер 113 позы вождения определяет, является или нет момент времени моментом, когда автоматический режим вождения должен быть переключен на режим вождения вручную. Например, когда транспортное средство въезжает на дорогу общего пользования с автомагистрали, или когда определяется, что автоматическое управление движением не может быть продолжено, по резкому изменению в окружающей обстановке движения или т.п., контроллер 113 позы вождения определяет, что наступил момент времени, когда автоматический режим вождения должен быть переведен в режим вождения вручную. Затем когда автоматический режим вождения продолжается, а именно остается без изменения, или когда контроллер 113 позы вождения определяет, что режим вождения должен быть переведен в режим вождения вручную, обработка переходит к этапу S10.
На этапе S10 контроллер 113 позы вождения приводится в действие и управляет наклоняющим мотором 21, скользящим мотором 23 и актуатором 25 рулевого управления, в то же время определяя позу вождения на основе сигналов обнаружения датчика 22 наклона и датчика 24 скольжения. Таким образом, поза вождения переключается в рекомендованную позу вождения вручную, заданную на этапе S6.
[0028] На этапе S11 контроллер 113 позы вождения определяет, является или нет момент времени моментом, когда режим вождения вручную должен быть переведен в автоматический режим вождения. Например, когда водитель задействует переключатель 111 автоматического/ручного режима движения, чтобы создавать состояние, указывающее автоматический режим вождения, контроллер 113 позы вождения определяет, что наступил момент времени, когда режим вождения вручную должен быть переведен в автоматический режим вождения. Тогда, когда режим вождения вручную продолжается, а именно, остается без изменения, и когда контроллер 113 позы вождения определяет, что режим вождения должен быть переведен в автоматический режим вождения, обработка переходит к этапу S12.
На этапе S12 контроллер 113 позы вождения приводит в действие и управляет наклоняющим мотором 21, скользящим мотором 23 и актуатором 25 рулевого управления, в то же время определяя позу вождения на основе сигналов обнаружения датчика 22 наклона и датчика 24 скольжения. Таким образом, поза вождения переключается в рекомендованную позу автоматического вождения, заданную на этапе S7.
[0029] (Работа)
Работа настоящего варианта осуществления будет описана ниже.
Когда водитель устанавливает ключ в позицию запуска, чтобы запускать двигатель, контроллер 113 позы вождения оценивает размер тела водителя, такой как длина ног, длина рук от плеча до кисти или т.п., из интервала скольжения сиденья для сиденья водителя, когда водитель садится в транспортное средство (этап S3 на фиг. 4). Кроме того, физическая особенность водителя (гибкость) оценивается из степени открытия двери, когда водитель садится в транспортное средство (этап S4). Затем рекомендованная поза вождения, подходящая для режима вождения вручную, и рекомендованная поза вождения, подходящая для автоматического режима вождения, задаются на основе размера тела и физической особенности, которые были оценены.
[0030] Когда размер тела является сравнительно большим, а гибкость является низкой, водитель имеет склонность открывать дверь транспортного средства сравнительно широко, чтобы садиться в транспортное средство. Кроме того, интервал скольжения водительского сиденья, когда водитель садится в транспортное средство, является относительно большим. Таким образом, размер тела водителя и физическая особенность оцениваются с помощью такого различия в действии, когда водитель садится в транспортное средство, в зависимости от размера тела и физической особенности.
Затем в соответствии с оцененным размером тела, поза, в которой усилие нажатия на руль равно или больше некоторой величины, задается в качестве позы вождения в режиме вождения вручную (этап S5) и затем корректируется с помощью физической особенности, посредством которой поза вождения была оценена (этап S6).
[0031] Как иллюстрировано на фиг. 7, когда гибкость является низкой, даже с тем же размером тела, поскольку водитель находится ближе к рулевому колесу, точность действия руления выше по сравнению со случаем обычной гибкости. Таким образом, когда гибкость водителя является низкой, поза вождения вручную, которая была задана в зависимости от размера тела, корректируется так, что продольное положение PhST руля является меньшим, и задается в качестве рекомендованной позы вождения вручную.
[0032] Например, в случае, когда настройка была выполнена так, что водитель управляет транспортным средством на автомагистрали в автоматическом режиме вождения и затем въезжает на развязку, вручную управляя транспортным средством, необходимо переключаться из автоматического режима вождения в режим вождения вручную непосредственно перед развязкой. Другими словами, когда местоположение транспортного средства достигает места непосредственно перед развязкой во время движения в автоматическом режиме вождения, контроллер 113 позы вождения определяет, что автоматический режим вождения должен быть переведен в режим вождения вручную (этап S9: Да). Затем контроллер 113 позы вождения управляет каждой частью водительского сиденья и переключает позу водителя в рекомендованную позу вождения вручную, которая была задана на основе размера тела водителя и физической особенности (этап S10).
[0033] Соответственно, поза водителя изменяется на позу, привычную телу, которая обычно используется в качестве позы для вождения вручную. Поэтому, водитель способен легко распознавать, что необходимо переключаться на режим вождения вручную. Таким образом, водитель задействует переключатель 111 автоматического/ручного режима движения, так что переход на вождение вручную может быть выполнен естественным образом.
Кроме того, рекомендованная поза вождения вручную задается в позу с усилием давления при рулении, равным или больше некоторой величины, принимая во внимание размер тела водителя и физическую особенность. Поэтому, в режиме вождения вручную, с момента времени, когда водитель удерживает рулевое колесо, устойчивая операция руления может быть реализована.
[0034] Когда водитель задействует переключатель 111 автоматического/ручного режима движения при управлении транспортным средством в режиме вождения вручную, контроллер 103 автоматического движения начинает автоматическое управление движением. Затем контроллер 113 позы вождения определяет, что режим вождения вручную должен быть переведен в автоматический режим вождения (этап S11: Да). Затем контроллер 113 позы вождения управляет каждой частью водительского сиденья и переключает позу водителя в рекомендованную позу автоматического вождения (этап S12).
Другими словами, на этапах S10 и S12 выполняется обработка, чтобы делать угол наклона водительского сиденья в автоматическом режиме вождения больше угла наклона водительского сиденья в режиме вождения вручную.
[0035] Соответственно, поза водителя является позой со сравнительно большим углом в тазобедренных суставах. Таким образом, в автоматическом режиме вождения, водитель способен принимать комфортную позу, и утомление водителя в процессе движения уменьшается. Кроме того, за счет смены на такую комфортную позу, таким образом, водитель может легко понимать ситуацию, что водитель может доверить управление транспортному средству при автоматическом управлении движением.
В этой ситуации рекомендованная поза автоматического вождения задается, принимая во внимание величину давления на живот и мышечную нагрузку для поддержания тела. Величина давления на живот является меньшей, когда угол в тазобедренных суставах больше, а мышечная нагрузка для поддержания тела постепенно увеличивается в области, где угол в тазобедренных суставах больше заданного значения. Поскольку рекомендованная поза автоматического вождения задается, принимая во внимание это, представляется возможным для водителя принимать позу, когда физическая нагрузка водителя минимальна в автоматическом режиме вождения. Таким образом, утомление водителя в процессе движения в автоматическом режиме вождения может быть эффективно уменьшено.
[0036] Как описано выше, в настоящем варианте осуществления, посредством изменения комбинации угла наклона водительского сиденья, интервала скольжения сиденья и положения руля, соответственно, поза водителя изменяется на рекомендованную позу вождения в соответствии с каждым режимом вождения, которая была задана, принимая во внимание размер тела водителя и физическую особенность. В этой ситуации, в режиме вождения вручную, поза управляется, чтобы быть позой вождения (высокая устойчивость руления/высокая точность действия), которая хороша в удобстве использования рулевого управления. Кроме того, в автоматическом режиме вождения, поза управляется так, что утомление водителя становится небольшим в процессе движения.
[0037] Таким образом, в случае переключения режима вождения, поскольку положение каждой части в водительском сиденье управляется, чтобы изменять позу водителя, водитель способен легко распознавать переключение режима вождения по сравнению со случаем, когда о переключении режима вождения предупреждается звонком, звуком или вибрацией сиденья. Кроме того, поскольку поза вождения в каждом режиме вождения задается на основе размера тела водителя и физической особенности, поза вождения, подходящая каждому режиму вождения, может быть задана.
[0038] Следует отметить, что на фиг. 2 наклоняющий мотор 21 соответствует блоку регулировки угла наклона, мотор 23 скольжения соответствует блоку продольной регулировки положения, а актуатор 25 рулевого управления соответствует блоку регулировки рулевого управления.
Дополнительно, на фиг. 4, этап S3 соответствует блоку оценки размера тела, а этап S4 соответствует блоку оценки физической особенности. Кроме того, этап S5 соответствует блоку настройки позы вождения вручную, а этап S6 соответствует блоку корректировки позы вождения вручную. Кроме того, этап S10 и S12 соответствует контроллеру угла наклона.
[0039] (Эффективность)
В настоящем варианте осуществления достижима следующая эффективность.
(1) Когда обнаруживается переключение из режима вождения вручную в режим автоматического вождения, контроллер 113 позы вождения увеличивает угол наклона водительского сиденья до угла наклона в автоматическом режиме вождения с угла наклона в режиме вождения вручную. Кроме того, когда обнаруживается переключение из автоматического режима вождения в режим вождения вручную, контроллер 113 позы вождения уменьшает угол наклона водительского сиденья до угла наклона в режиме вождения вручную с угла наклона в автоматическом режиме вождения.
Таким образом, поза водителя изменяется посредством изменения угла наклона водительского сиденья в зависимости от режима вождения. В этой ситуации, поскольку угол наклона водительского сиденья в автоматическом режиме вождения больше угла наклона водительского сиденья в режиме вождения вручную, водитель способен легко понимать переключение режима вождения.
[0040] (2) Контроллер 113 позы вождения оценивает размер тела водителя. Кроме того, контроллер 113 позы вождения задает позу, в которой величина нажатия водителя на рулевое колесо равна или больше некоторого значения, которое предоставляет возможность устойчивого руления, которое определяется по оцененному размеру тела водителя, в качестве рекомендованной позы вождения, подходящей для режима вождения вручную.
Таким образом, когда режим вождения переключается на режим вождения вручную, величина давления при рулении равна или больше некоторой величины с момента времени, когда водитель удерживает рулевое колесо. Поэтому, водитель способен выполнять устойчивое действие руления. Кроме того, поскольку рекомендованная поза вождения в режиме вождения вручную является позой, привычной для тела водителя, которая используется в качестве позы при вождении вручную, представляется возможным переключаться на режим вождения вручную с автоматического режима вождения естественным образом.
[0041] (3) Контроллер 113 позы вождения оценивает физическую особенность водителя. Затем в зависимости от физической особенности, которая была оценена, контроллер 113 позы вождения корректирует рекомендованную позу вождения в режиме вождения вручную, которая была задана на основе размера тела.
Таким образом, принимая во внимание различие в позе руления, в которой водитель легко управляет рулевым колесом в зависимости от индивидуальной особенности человеческого тела, рекомендованная поза вождения в режиме вождения вручную определяется в зависимости от физической особенности водителя. Таким образом, в режиме вождения вручную, представляется возможным для водителя принимать позу вождения, более подходящую для водителя.
[0042] (4) Контроллер 113 позы вождения оценивает физическую гибкость водителя как физическую особенность водителя на основе действия водителя во время посадки или высадки из транспортного средства.
Даже с одинаковым размером тела поза вождения, которая улучшает точность действий руления, отличается в зависимости от различия в физической гибкости. Например, когда гибкость является обычной или высокой, точность руления является более высокой, поскольку рулевое колесо ближе к водителю, чем физически обычное положение. С другой стороны, когда гибкость является низкой, точность действия является более низкой, поскольку рулевое колесо находится ближе к водителю, чем физическое обычное положение. Принимая во внимание эти факты, рекомендованная поза вождения в режиме вождения вручную определяется, так что водитель может принимать позу вождения, более подходящую для водителя, и устойчивое действие руления может быть достигнуто.
[0043] (5) Контроллер 113 позы вождения изменяет величину скольжения нижней части сиденья в дополнение к углу наклона. Затем когда контроллер 113 позы вождения обнаруживает переключение с автоматического режима вождения на режим вождения вручную, контроллер 113 позы вождения задает положение нижней поверхности водительского сиденья в продольном направлении транспортного средства так, что поза вождения водителя является рекомендованной позой вождения в режиме вождения вручную.
Таким образом, поскольку угол наклона и величина скольжения водительского сиденья конфигурируются, чтобы быть изменяемыми, угол в тазобедренных суставах водителя и расстояние от водительского сиденья до рулевого колеса в продольном направлении транспортного средства могут регулироваться. Таким образом, поза водителя может быть изменена на рекомендованную позу вождения, подходящую для режима вождения, соответствующим образом.
[0044] (6) Контроллер 113 позы вождения изменяет положение руля в дополнение к углу наклона спинки сиденья. Когда контроллер 113 позы вождения обнаруживает переключение с автоматического режима вождения на режим вождения вручную, контроллер 113 позы вождения задает положение рулевого колеса в продольном направлении и в вертикальном направлении транспортного средства так, что поза вождения водителя является рекомендованной позой вождения в режиме вождения вручную.
Таким образом, поскольку угол наклона и интервал скольжения водительского сиденья и положение рулевого колеса конфигурируются, чтобы быть изменяемыми, позиционное соотношение угла в тазобедренных суставах водителя, водительского сиденья и рулевого колеса может быть отрегулировано соответствующим образом. Таким образом, управление позой разрешается в рекомендованную позу вождения, подходящую для режима вождения с точностью.
[0045] (7) Когда контроллер 113 позы вождения обнаруживает переключение с режима вождения вручную на автоматический режим вождения, угол наклона водительского сиденья делается больше в угол наклона в автоматическом режиме вождения с угла наклона в режиме вождения вручную. Кроме того, когда контроллер 113 позы вождения обнаруживает переключение с автоматического режима вождения на режим вождения вручную, угол наклона водительского сиденья делается меньше в угол наклона в режиме вождения вручную с угла наклона в автоматическом режиме вождения.
Таким образом, поза водителя изменяется посредством изменения угла наклона водительского сиденья в зависимости от режима вождения. Поскольку поза вождения изменяется, чтобы быть подходящей для режима вождения, представляется возможным для водителя легко понимать переключение режима вождения.
[0046] (Применения)
(1) В вышеописанном варианте осуществления, вместо конфигурации на фиг. 2, датчик 26 контактного давления может быть размещен на спинке 12 сиденья, как иллюстрировано на фиг. 10. В такой конфигурации усилие давления при рулении может быть измерено опосредованно из соотношения действия и реакции датчика 26 контактного давления спинки 12 сиденья. Таким образом, представляется возможным регулировать позу вождения в режиме вождения вручную с определенностью так, что усилие давления при рулении равно или больше некоторой величины T1.
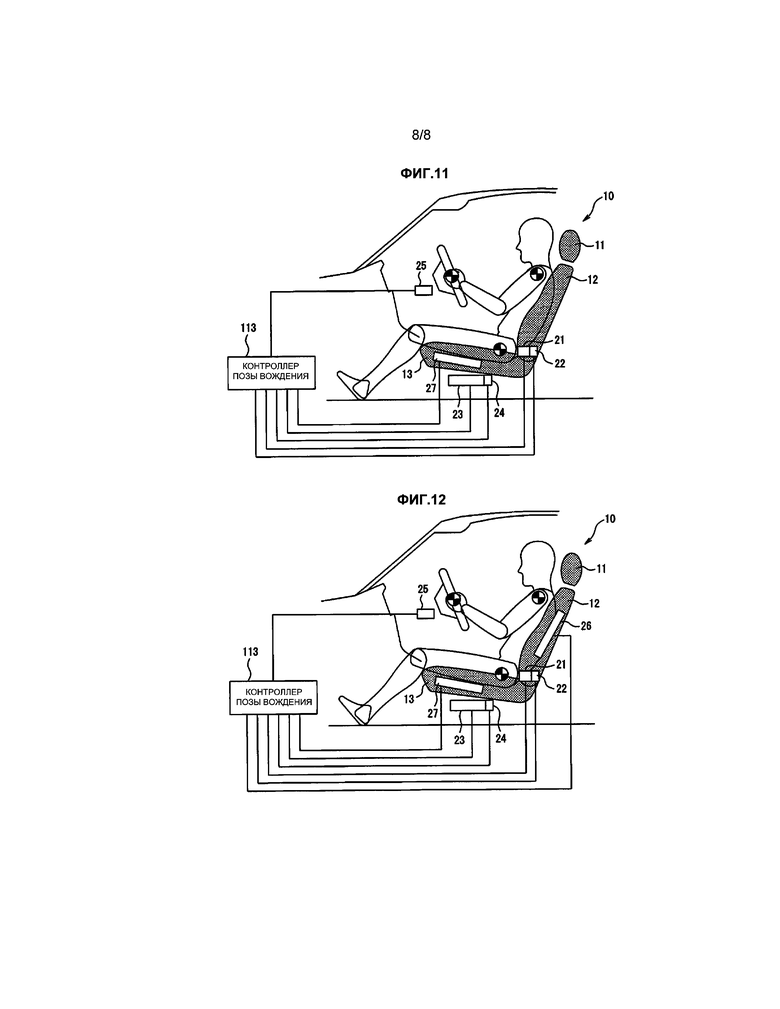
[0047] (2) В вышеописанном варианте осуществления, вместо конфигурации на фиг. 2, датчик 27 контактного давления может быть размещен в нижней поверхности сиденья, как иллюстрировано на фиг. 11. В такой конфигурации, когда водитель сидит, представляется возможным оценивать вес водителя. Таким образом, точность оценки физического размера водителя может быть улучшена с помощью длины ног водителя, которая была оценена на основе интервала скольжения сиденья, обнаруженного посредством датчика 23 скольжения, когда водитель садится в транспортного средство, и веса водителя, который был оценен на основе сигнала обнаружения датчика 27 контактного давления.
[0048] (3) В вышеописанном варианте осуществления, вместо конфигурации на фиг. 2, датчик 26 контактного давления на фиг. 10 и датчик 27 контактного давления на фиг. 11 могут быть включены, как иллюстрировано на фиг. 12. Соответственно, представляется возможным оценивать размер тела водителя с точностью и предоставлять возможность управления позой с высокой точностью при переключении на режим вождения вручную.
[0049] (Модификации)
(1) В вышеописанном варианте осуществления степень надежности автоматического управления движением посредством контроллера 103 автоматического движения определяется, так что поза вождения в автоматическом режиме вождения может быть отрегулирована в зависимости от степени надежности. Здесь, степень надежности автоматического управления движением является степенью доверия системы, представляющей определенность автоматического управления движением. Степень надежности ниже, когда присутствует более высокая вероятность неправильного срабатывания в автоматическом управлении движением. Затем в то время как транспортное средство движется в автоматическом режиме движения, контроллер 113 позы вождения делает позу вождения водителя более близкой к рекомендованной позе вождения в режиме вождения вручную из рекомендованной позы вождения в автоматическом режиме вождения, когда степень надежности автоматического управления движением становится более низкой.
[0050] Другими словами, поза вождения конфигурируется, чтобы быть регулируемой ступенчатым образом между рекомендованной позой вождения вручную, заданной на этапе S6 на фиг. 4, и рекомендованной позой автоматического вождения, заданной на этапе S7. Затем предоставляется возможность регулировок, так что, когда степень надежности автоматического управления движением становится более высокой, поза вождения становится более близкой к рекомендованной позе автоматического вождения, тогда как когда степень надежности автоматического вождения становится более низкой, поза вождения становится более близкой к рекомендованной позе вождения вручную.
Таким образом, поскольку поза управляется в соответствии со степенью достоверности системы транспортного средства в автоматическом управлении движением, представляется возможным переключаться с автоматического состояния вождения на состояние вождения вручную ступенчатым образом.
[0051] Кроме того, степень надежности автоматического управления движением, описанная выше, определяется посредством любого одного или комбинации множества обнаруживаемых объектов в автоматическом управлении движением, множества датчиков, необходимых для обнаружения в автоматическом управлении движением, сложности обнаруживаемого объекта в автоматическом управлении движением, такой как прогноз движения велосипеда, множества вариантов выбора в пути движения, величины срабатывания, необходимой для определения объекта управления, и энергии, необходимой для автоматического управления движением.
Таким образом, представляется возможным легко понимать степень достоверности системы относительно обнаружения или распознавания в автоматическом управлении движением посредством позы вождения.
[0052] (2) В вышеописанном варианте осуществления было дано описание случая, когда автоматическое управление движением выполняется так, что водитель даже не задействует элемент управления, и транспортное средство управляет движением автономно. Настоящее изобретение, однако, применимо к случаю, когда поворачивающий механизм управляется, чтобы автономно работать без водительского управления элементом управления, по меньшей мере.
До этого момента, полное раскрытие японской патентной заявки № 2013-152548, поданной 23 июля 2013 года, включающей в себя описание, формулу изобретения, чертежи и реферат, включено в данный документ по ссылке во всей своей полноте.
В данном документе ограниченное число вариантов осуществления было описано со ссылкой на чертежи. Настоящее изобретение, однако, не ограничивается ими. Специалисту в данной области техники будет очевидно, что существуют вариации в варианте осуществления на основе вышеописанного открытия.
Список номеров ссылок
[0053] 10... водительское сиденье, 11... подголовник, 12... спинка сиденья, 13... нижняя часть сиденья, 21... наклоняющий мотор, 22... наклоняющий мотор, 23... мотор скольжения, 24... датчик скольжения, 25... актуатор рулевого управления, 101... устройство обнаружения внешней окружающей обстановки движения, 102... устройство определения состояния транспортного средства, 103... контроллер автоматического движения, 104... актуатор управления давлением тормозной жидкости, 105... актуатор управления степенью открытия дроссельной заслонки, 106... актуатор управления углом поворота рулевого колеса, 107... тормозное устройство, 108... устройство акселератора, 109... поворачивающее устройство, 110... устройство задания скорости движения, 111... переключатель автоматического/ручного режима движения, 112... сигнальное устройство, 113... контроллер позы вождения, 114... датчик положения сиденья, 115... актуатор положения сиденья, 116... водительское сиденье.






Заявленное изобретение относится к устройству и способу помощи вождению транспортного средства, в котором автоматический и ручной режимы вождения являются переключаемыми. Устройство помощи вождению транспортного средства содержит блок регулировки угла наклона и контроллер угла наклона водительского сидения. Контроллер угла наклона сконфигурирован, чтобы изменять угол наклона, управляя блоком регулировки угла наклона в зависимости от режима вождения. Режим вождения является переключаемым между автоматическим режимом вождения для выполнения автоматического управления движением для автоматического управления рулевым механизмом независимо от действия руления водителя, и режимом вождения вручную для управления рулевым механизмом в зависимости от действия руления водителя. Контроллер угла наклона сконфигурирован так, что угол наклона в автоматическом режиме вождения больше угла наклона в режиме вождения вручную. Достигается облегчение понимания переключения режима вождения. 2 н. и 6 з.п. ф-лы, 14 ил.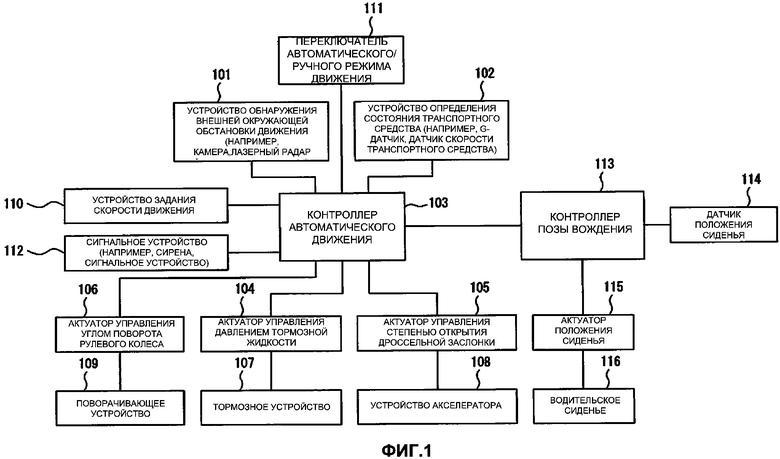
1. Устройство помощи вождению транспортного средства, содержащее:
блок регулировки угла наклона, приспособленный регулировать угол наклона водительского сиденья; и
контроллер угла наклона, сконфигурированный, чтобы изменять угол наклона, управляя блоком регулировки угла наклона в зависимости от режима вождения, причем режим вождения является переключаемым между автоматическим режимом вождения для выполнения автоматического управления движением для автоматического управления рулевым механизмом независимо от действия руления водителя и режимом вождения вручную для управления рулевым механизмом в зависимости от действия руления водителя,
при этом контроллер угла наклона сконфигурирован, чтобы управлять блоком регулировки угла наклона так, что угол наклона в автоматическом режиме вождения больше угла наклона в режиме вождения вручную.
2. Устройство помощи вождению транспортного средства по п. 1, дополнительно содержащее:
блок оценки размера тела, сконфигурированный, чтобы оценивать размер тела водителя; и
блок настройки позы вождения вручную, сконфигурированный, чтобы задавать позу, в которой усилие нажатия водителя на рулевое колесо равно или больше некоторого значения, что предоставляет возможность устойчивого руления, которое определяется по размеру тела водителя, оцененному посредством блока оценки размера тела, в качестве позы вождения в соответствии с режимом вождения вручную,
при этом контроллер угла наклона сконфигурирован, чтобы управлять блоком регулировки угла наклона так, что поза вождения водителя в режиме вождения вручную является позой, заданной посредством блока задания позы вождения вручную.
3. Устройство помощи вождению транспортного средства по п. 2, дополнительно содержащее:
блок оценки физической особенности, сконфигурированный, чтобы оценивать персональную физическую особенность водителя; и
блок корректировки позы вождения вручную, сконфигурированный, чтобы корректировать позу вождения в соответствии с режимом вождения вручную, заданную посредством блока задания позы вождения вручную, с помощью персональной физической особенности, оцененной посредством блока оценки физической особенности.
4. Устройство помощи вождению транспортного средства по п. 3, при этом блок оценки физической особенности сконфигурирован, чтобы оценивать физическую гибкость водителя как персональную физическую особенность водителя на основе действия водителя, когда водитель садится или высаживается из транспортного средства.
5. Устройство помощи вождению транспортного средства по любому из пп. 2-4, дополнительно содержащее блок продольной регулировки положения, приспособленный регулировать нижнюю поверхность сиденья для конкретного сиденья в продольном направлении транспортного средства,
при этом контроллер угла наклона сконфигурирован, чтобы управлять блоком продольной регулировки положения в дополнение к блоку регулировки угла наклона, и
при этом контроллер угла наклона, когда обнаруживается переключение с автоматического режима вождения на режим вождения вручную, сконфигурирован, чтобы управлять блоком продольной регулировки положения так, что положение нижней поверхности сиденья для конкретного сиденья в продольном направлении транспортного средства становится положением, в котором поза вождения водителя становится позой, заданной посредством блока задания позы вождения вручную.
6. Устройство помощи вождению транспортного средства по любому из пп. 2-5, дополнительно содержащее блок регулировки рулевого управления, приспособленный регулировать положение рулевого колеса в продольном направлении и вертикальном направлении транспортного средства,
при этом контроллер угла наклона сконфигурирован, чтобы управлять блоком регулировки рулевого управления в дополнение к блоку регулировки угла наклона, и
при этом контроллер угла наклона, когда обнаруживается переключение с режима вождения вручную на автоматический режим вождения, сконфигурирован, чтобы управлять блоком регулировки рулевого управления так, что положение рулевого колеса в продольном направлении и вертикальном направлении транспортного средства становится положением, в котором поза вождения водителя является позой, заданной посредством блока задания позы вождения вручную.
7. Устройство помощи вождению транспортного средства по любому из пп. 1-6,
при этом автоматическое управление движением должно выполнять движение транспортного средства автоматически независимо от действия руления водителя с помощью элемента рулевого управления,
дополнительно содержащее блок определения степени надежности, чтобы определять степень надежности автоматического управления движением на основе, по меньшей мере, одного из множества обнаруживаемых объектов в автоматическом управлении движением, множества датчиков, необходимых для обнаружения в автоматическом управлении движением, сложности обнаруживаемого объекта в автоматическом управлении движением, и величины срабатывания в автоматическом управлении движением,
при этом контроллер угла наклона сконфигурирован, чтобы управлять блоком регулировки угла наклона так, что когда степень надежности, определенная посредством блока определения степени надежности, является более низкой в автоматическом управлении движением, поза вождения водителя находится ближе к позе вождения в соответствии с автоматическим режимом вождения от позы вождения в соответствии с режимом вождения вручную.
8. Способ помощи вождению транспортного средства, содержащий этапы, на которых:
переключаются между автоматическим режимом вождения для выполнения автоматического управления движением для автоматического управления рулевым механизмом независимо от действия руления водителя и режимом вождения вручную для управления рулевым механизмом в зависимости от действия руления водителя; и
осуществляют управление так, что угол наклона водительского сиденья в автоматическом режиме вождения больше угла наклона водительского сиденья в режиме вождения вручную.
| JP 2007038704 A, 15.02.2007 | |||
| JP 2005335627 A, 08.12.2005 | |||
| БОЕВАЯ МАШИНА ДЕСАНТА | 2001 |
|
RU2223460C2 |

