Область техники, к которой относится изобретение
Изобретение относится к области управления движением на железных дорогах, и более точно, к способам определения порядковых номеров вагонов движущегося железнодорожного состава путем подсчета числа вагонов, преследующих через участок контроля.
Информация о том, какой по порядку вагон состава находится в данный момент на участке контроля, особенно в случае, когда состав совершает маневровые перемещения, важна для правильного функционирования многих систем на железнодорожном транспорте, в том числе и для систем видеонаблюдения за проследованием состава. Эта информация позволяет относить фрагменты видео к определенному вагону, попавшему в поле зрения видеокамеры, а также относить к определенному вагону информацию, получаемую от устройств, осуществляющих контроль или измерение тех или иных характеристик вагона, например информацию о состоянии колесных пар, сцепных устройств и т.п. Кроме того, возможность получать внешний сигнал о проследовании вагона с некоторым порядковым номером в определенном направлении крайне важна для надежного функционирования систем оптического распознавания инвентарных номеров вагонов.
Уровень техники
Известны различные способы подсчета числа вагонов движущегося железнодорожного состава с использованием датчиков, установленных вдоль пути его движения (класс МПК B61L 1/16).
Известны способы подсчета числа вагонов и устройства, реализующие эти способы, основанные на использовании путевых датчиков, реагирующих на прохождение мимо них колесных пар вагонов и расположенных на пути движения состава на уровне колесных пар и на уровне рельсов (см., например, патент РФ № RU 2013263 от 1991 г., по классу МПК B61L 1/16, «Устройство для счета подвижных единиц»). Эти способы имеют следующие недостатки:
- они требуют распознавания типов вагонов по их предварительно заданным характеристикам (число осей колесных пар и расстояния между ними), что ограничивает область применения только подсчетом вагонов заранее известных типов, усложняет обработку сигналов путевых датчиком и приводит к снижению быстродействия системы счета вагонов;
- сигнал о проследовании вагона выдается с недопустимой для многих применений задержкой, иногда после прохождения нескольких вагонов, что, например, неприемлемо, когда определение порядковых номеров вагонов путем их счета должно быть совмещено с работой видеосистемы по распознаванию указанных на вагонах их инвентарных номеров;
- не обеспечивают надежный подсчет вагонов при маневрировании состава, когда состав движется с очень низкой скоростью, с остановками и совершает реверсивные движения; поскольку в этих случаях система, реализующая эти способы подсчета вагонов, может не успеть идентифицировать вагон;
- установка путевых датчиков в непосредственной близости от рельсов или на рельсовом пути создает технические и эксплуатационные трудности.
Известен способ определения порядковых номеров вагонов движущегося железнодорожного состава с использованием фотоэлектронного детектора просвета между вагонами, реализованный в виде отдельного устройства в составе сложной многофункциональной системы (см. патент РФ №RU 2066282 от 1995 г. по классу МПК В61К 9/02, «Устройство для контроля негабаритного груза подвижного состава»). Система по этому патенту содержит устройство счета вагонов, названное «датчиком 3 числа вагонов», содержащий «излучатель 9» и «фотоприемник 10», расположенные по разные стороны пути так, что луч излучателя может перекрываться движущимся вагоном. Способ счета вагонов, реализованный в этом устройстве, заключается в том, что при движении состава ведут счет срабатываний фотоэлектронного детектора (или иначе говоря, датчика) при просветах между вагонами. Этот способ определения порядковых номеров вагонов, основанный на детектировании просветов между вагонами с использованием для этого электромагнитного излучения, обеспечивает определение порядкового номера вагона сразу при срабатывании детектора просвета и не требует задержки, необходимой для идентификации типа вагона и счета колесных пар в указанных выше способах счета вагонов с использованием путевых датчиков, реагирующих на прохождение мимо них колесных пар вагонов. Недостаток этого способа состоит в том, что он не обеспечивает определение порядковых номеров вагонов при изменениях направления движения и, частности, при маневрировании состава.
Известно, что для детектирования просвета межу вагонами используют лазерный детектор или детектор, содержащий видеокамеру и пластину с контрастным эталонным изображением, которые устанавливают по разные стороны железнодорожного пути. Эти средства детектирования использованы в системе контроля соединения между вагонами, использующей методы анализа изображения (см. патент США № US 7,328,871, от 14.09.2005, опубл. 2008, по классу США 246/169R, "Railroad car coupler gap analyzer"). В этом патенте одновременно может использоваться один из указанных детекторов просвета между вагонами для обнаружения и счета этих просветов, аналогичного счету вагонов. Недостаток способа счета просветов в этом патенте заключается в том, что он применим только в условиях, когда состав движется без остановок и без маневрирования.
Известны способ обработки информации о вагонах движущегося железнодорожного состава и реализующая его сложная многофункциональная система, в которые включена идентификация каждого вагона с использованием испускания и детектирования некоторого неопределенного множества электромагнитных лучей, направленных поперек железнодорожного пути (см. патент США № US 8,655,540, от 6.03.2008, опубл. 2014, по классу США 701/29.1, "Rail vehicle identification and processing", авторы Mian и др.). В этом патенте на способ отмечается, что идентификация вагона осуществляется по факту перекрытия упомянутых лучей с учетом порядка их перекрытия и длины промежутка времени их перекрытия. В патенте сказано, что упомянутые лучи используют для обнаружения просветов (промежутков) между вагонами. Но в этом патенте не раскрывается в чем заключается идентификация вагона. Можно предположить, что под идентификацией вагона авторами понимается определение порядкового номера вагона в результате логического анализа сигналов лучевых детекторов. Однако способ определения порядковых номеров вагонов движущегося железнодорожного состава с использованием упомянутых лучей в данном патенте не раскрыт, т.е. не указаны правила определения номеров вагонов и последовательность действий по проверке этих правил, а также не указаны количество упомянутых лучей и условия их расстановки, при которых возможно однозначное определение порядкового номера вагона, а также не учитываются время между последовательными моментами получения логических сигналов о состоянии детекторов и ограничение на величину смещения вагона за это время. Таким образом, способ идентификации вагонов, указанный в данном патенте США, представляет собой нечеткую постановку задачи и не содержит ее технического решения, несмотря на упоминание электромагнитных лучей. Кроме того, упомянутое в патенте условие, согласно которому расстояние между лучами должно быть не больше длины промежутка между вагонами, не является достаточным, поскольку в этом условии не сказано о расстоянии между какими лучами идет речь и можно понять, что речь идет о расстоянии между соседними лучами. В то же время в этом патенте не указано никакого условия, касающегося расстояния между крайними лучами. Указанное выше условие не позволяет отличить временную остановку межвагонного просвета (промежутка) напротив модуля 40 обнаружения вагонов от ситуации полного отсутствия состава на участке контроля. Здесь имеется в виду ситуация, когда состав остановился так, что ни один из лучей, входящих в состав модуля 40 обнаружения вагона, не перекрыт, то есть все они проходят свободно через просвет между вагонами.
Известен также патент США тех же авторов (Mian и др.) на аналогичные способ обработки информации о вагонах движущегося железнодорожного состава и реализующая его сложная многофункциональная система, в которые включена идентификация каждого вагона с использованием испускания и детектирования некоторого неопределенного множества электромагнитных лучей, направленных поперек железнодорожного пути (см. патент США № US 8,140,250, от 2008, опубл. 2012, по классу США 701/117, "Rail vehicle identification and processing"). Этот патент выдан по более поздней заявке от 11.07.2008 г. и содержит способ идентификации вагонов, текстуально совпадающий со способом идентификации вагонов, описанным в рассмотренном выше патенте US 8,655,540, выданном по более ранней заявке от 6.03.2008.
Раскрытие (сущность) изобретения
Задачей предлагаемого изобретения является разработка такого способа определения порядковых номеров вагонов движущегося железнодорожного состава путем подсчета числа вагонов, который обеспечил бы технический результат в виде одновременного достижения следующих основных целей:
- обеспечение определения порядковых номеров вагонов разных типов, основанного на детектировании просветов между вагонами;
- обеспечение определения порядковых номеров вагонов при маневрировании железнодорожного состава, когда этот состав может останавливаться на короткое или длительное время, двигаться назад на небольшое или на значительное расстояние, превышающее длину вагона, а затем снова двигаться в прежнем направлении, или менять направление движения на противоположное, не пройдя целиком через участок контроля;
- обеспечение определения начала и конца железнодорожного состава;
- обеспечение возможности использования различных по принципу действия детекторов просвета между вагонами.
Кроме того, задачей предлагаемого изобретения является достижение следующих целей:
- обеспечение определения направления движения железнодорожного состава, в том числе при его маневрировании;
- обеспечение контроля изменения числа вагонов железнодорожного состава после того, как он выехал из контролируемого участка в направлении, противоположном направлению, в котором состав въехал на этот участок.
Этот технический результат достигается, прежде всего, благодаря предлагаемому способу определения порядковых номеров вагонов движущегося железнодорожного состава, при котором предварительно выполняют следующие действия:
- на контролируемом участке пути перемещения этого состава устанавливают три детектора просвета между вагонами на равных расстояниях между ними так, что каждый детектор фиксирует просвет между вагонами вдоль своей контрольной прямой линии передачи излучения, находящейся в вертикальной плоскости, перпендикулярной направлению пути, и при этом выполняют следующие условия:
Lmax≤D≤2⋅Lmin,
D/2≥ΔS,
где Lmax и Lmin - максимальное и минимальное значения длины L просвета между вагонами соответственно,
D - расстояние между крайними детекторами,
ΔS - максимальное возможное смещение состава за время между двумя последовательными моментами получения логических сигналов о состоянии детекторов,
- в процессоре реализуют регистры текущего и предыдущего состояний детекторов, получаемых в соседние моменты времени, индикатор приращения Δ номера вагона, которое может принимать значение «1» или «-1», а также левый и правый счетчики номеров вагонов, из которых левый счетчик предназначен для регистрации номера вагона, перекрывающего левый детектор или находящегося левее его, а правый счетчик предназначен для регистрации номера вагона, перекрывающего правый детектор или находящегося правее его, причем левым и правым детектором считают крайние детекторы по выбору потребителя,
а затем на этапе определения номеров вагонов движущегося состава выполняют следующие действия:
- получают выходные логические сигналы трех детекторов и передают их в регистр текущего состояния детекторов, а его предыдущее значение передают в регистр предыдущего состояния детекторов, причем в каждом из этих регистров располагают кортеж состояний трех детекторов, имеющий вид <x, y, z>, в котором каждая буква означает состояние одного детектора, которое может принимать два значения, условно обозначаемые ƒ и с, где ƒ - значение выходного логического сигнала детектора, соответствующее случаю, когда контрольная линия детектора не перекрыта вагоном, с
- значение выходного логического сигнала детектора, соответствующее случаю, когда контрольная линия детектора перекрыта вагоном, а левая буква указанного кортежа соответствует левому детектору,
- при помощи процессора анализируют содержимое регистров состояния детекторов и формируют содержимое счетчиков по следующим правилам:
a) если текущее состояние детекторов <ƒ, ƒ, ƒ>, то в обоих счетчиках устанавливают 0;
b) если текущее значение детекторов <с, ƒ, ƒ>, а предыдущее их значение <ƒ, ƒ, ƒ>, то устанавливают 1 в левом счетчике и в значении приращения Δ;
если текущее значение детекторов <ƒ, ƒ, с>, а предыдущее их значение <ƒ, ƒ, ƒ>, то устанавливают 1 в правом счетчике и -1 в значении приращения Δ;
c) если текущее значение детекторов <с, с, с> и предыдущее их значение <ƒ, с, с>, то в левый счетчик устанавливают значение правого счетчика, но если при том же текущем значении детекторов их предыдущее значение <с, с, ƒ>, то в правый счетчик устанавливают значение левого счетчика;
d) если предыдущее значение детекторов <с, с, с> и текущее значение <ƒ, с, с>, то к значению левого счетчика добавляют приращение Δ, но если при том же предыдущем значении детекторов их текущее значение <с, с, ƒ>, то из значения правого счетчика вычитают приращение Δ.
Это позволяет обеспечить одновременное достижение перечисленных целей изобретения. Отметим, что описанный выше способ обеспечивает возможность использования различных по принципу действия детекторов просвета между вагонами.
При этом получению указанного технического результата способствует то, что в предлагаемом способе в качестве хотя бы одного любого из трех детекторов просвета между вагонами могут быть использованы следующие типы детекторов:
- фотоэлектрический детектор, излучатель и приемник которого устанавливают по разные стороны железнодорожного пути;
- лазерный детектор, излучатель и приемник которого устанавливают по разные стороны железнодорожного пути;
- радиолучевой детектор, излучатель и приемник которого устанавливают по разные стороны железнодорожного пути;
- управляемую процессором видеокамеру и пластину с контрастным эталонным изображением, которые устанавливают по разные стороны железнодорожного пути так, что контрольная линия детектора идет от видеокамеры к центру эталонного изображения.
Это позволяет обеспечить использование различных по принципу действия детекторов просвета между вагонами и при этом одновременное использование любой комбинации из названных типов детекторов в качестве трех детекторов просвета между вагонами, необходимых для осуществления предлагаемого способа.
Получению указанного технического результата способствует то, что согласно предлагаемому способу в процессоре определяют направление движения состава и формируют код движения вправо или влево по следующим правилам:
а’) если текущее состояние детекторов <ƒ, ƒ, ƒ>, предыдущее их состояние <с, ƒ, ƒ>, то формируют код движения состава влево, а если при том же текущем состоянии детекторов предыдущее их состояние <ƒ, ƒ, с>, то формируют код движения состава вправо;
b’) если предыдущее состояние детекторов <ƒ, ƒ, ƒ>, a текущее их состояние <c, ƒ, ƒ>, то формируют код движения состава вправо, а если при том же предыдущем состоянии детекторов их текущее состояние <ƒ, ƒ, с>, то формируют код движения состава влево;
с’) если текущее состояние детекторов <с, с, с>, а предыдущее их состояние <ƒ, с, с>, то формируют код движения состава влево, но если при том же текущем состоянии детекторов предыдущее их состояние <с, с, ƒ>, то формируют код движения состава вправо;
d’) если предыдущее состояние детекторов <с, с, с>, а текущее их состояние <ƒ, с, с>, то формируют код движения состава вправо, но если при том же предыдущем состоянии детекторов их текущее состояние <с, c, ƒ>, то формируют код движения состава влево.
Это позволяет обеспечить корректное определение направления движения железнодорожного состава, в том числе при его маневрировании.
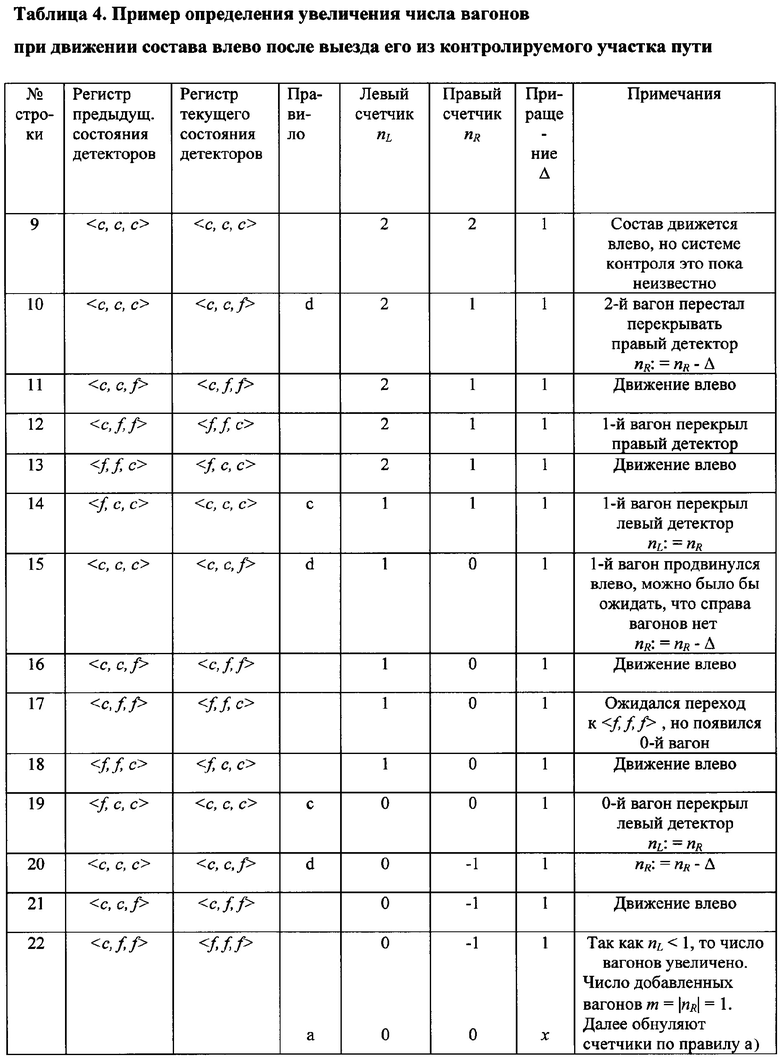
Получению указанного технического результата также способствует то, что согласно предлагаемому способу в процессоре контролируют изменение числа вагонов в указанном составе после того, как он выехал из контролируемого указанными тремя детекторами участка пути в направлении, противоположном направлению, в котором первый вагон этого состава въехал на указанный контролируемый участок, при этом формируют в процессоре коды увеличения или уменьшения числа вагонов в составе и число отсоединенных или добавленных вагонов в этом составе по следующим правилам:
- если последний вагон состава выехал из этого участка пути влево, то перед обнулением левого и правого счетчиков, осуществляемом при освобождении контролируемого участка от последнего вагона, формируют код уменьшения числа вагонов в той части состава, которая прошла контролируемый участок, если значение левого счетчика больше единицы, и формируют код увеличения числа вагонов в этой части состава, если значение этого счетчика меньше единицы, а число отсоединенных или добавленных вагонов определяют как абсолютное значение правого счетчика;
- если последний вагон состава выехал из этого участка пути вправо, то перед обнулением левого и правого счетчиков, осуществляемом при освобождении контролируемого участка от последнего вагона, формируют код уменьшения числа вагонов в той части состава, которая прошла контролируемый участок, если значение правого счетчика больше единицы, и формируют код увеличении числа вагонов в этой части состава, если значение этого счетчика меньше единицы, а число отсоединенных или добавленных вагонов определяют как абсолютное значение левого счетчика.
Это обеспечивает контроль изменения числа вагонов железнодорожного состава после его пребывания в зоне, находящейся за участком контроля, из которого он выехал.
Краткое описание чертежей
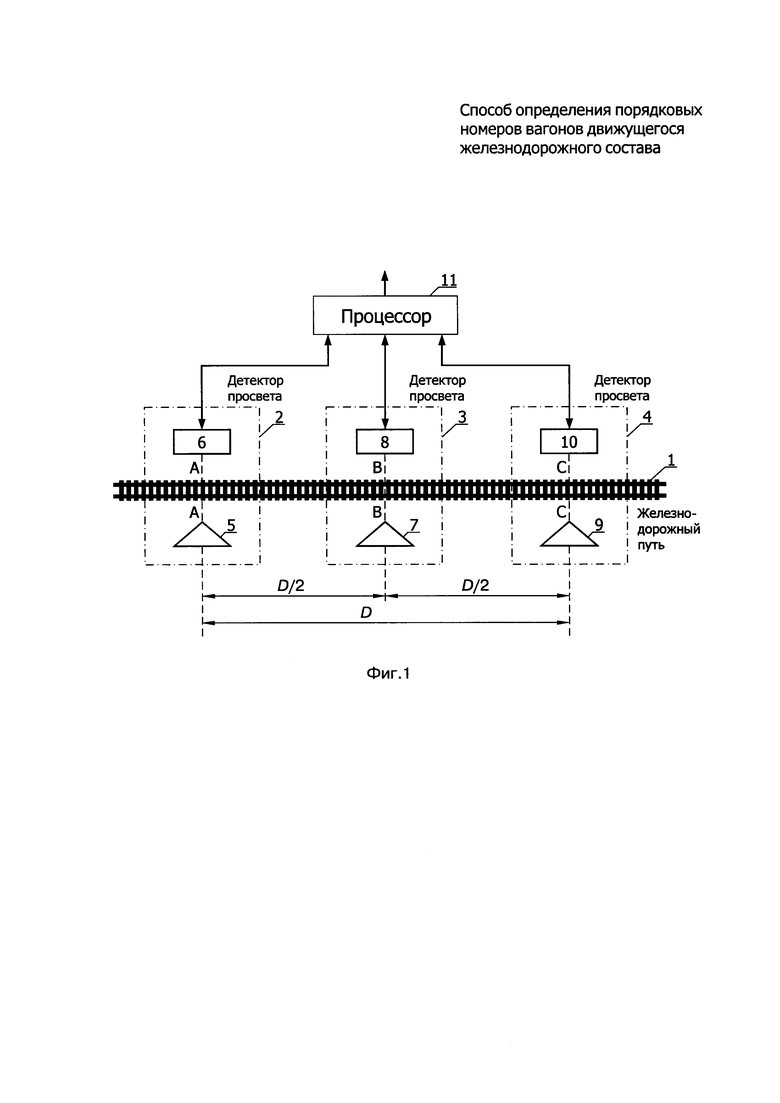
На фиг. 1 показана схема установки трех детекторов просвета между вагонами вдоль железнодорожного пути (вид сверху) для случая, когда приемники всех этих детекторов расположены с одной стороны этого пути;
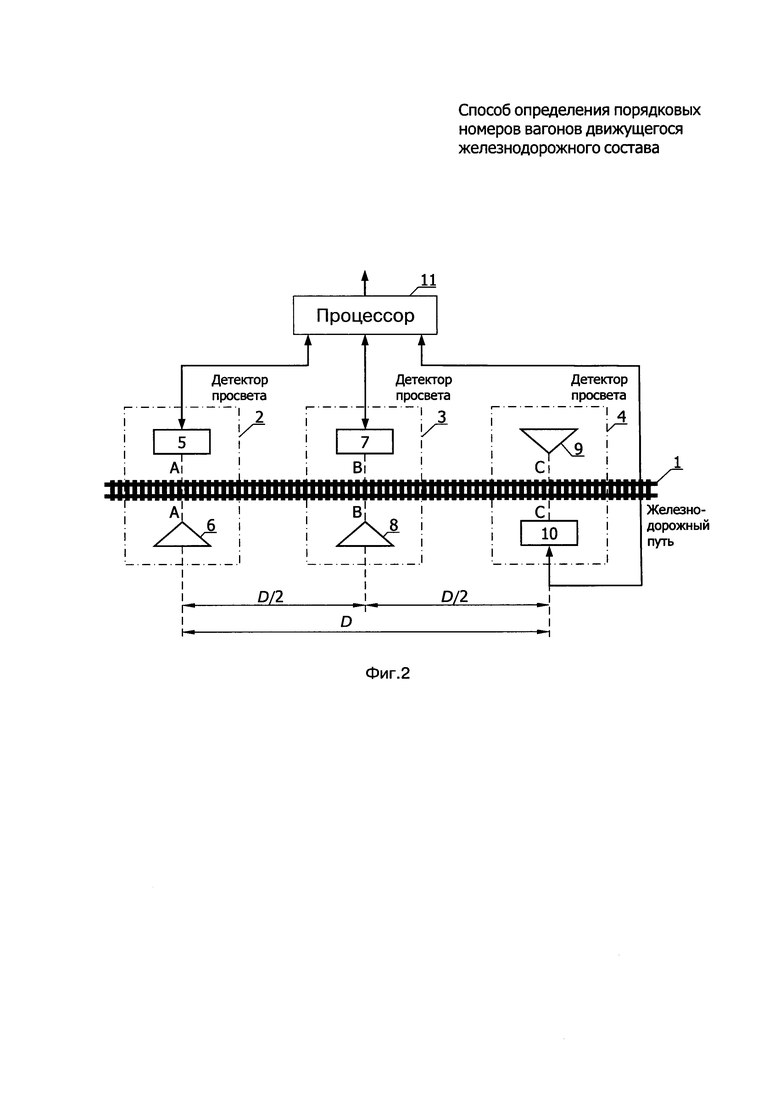
на фиг. 2 показан пример схемы установки трех детекторов просвета между вагонами вдоль железнодорожного пути (вид сверху) для случая, когда приемники этих детекторов расположены по разные стороны этого пути, т.е. когда приемник одного из этих детекторов расположен по одну сторону этого пути, а приемники двух других детекторов расположены по другую сторону этого пути;
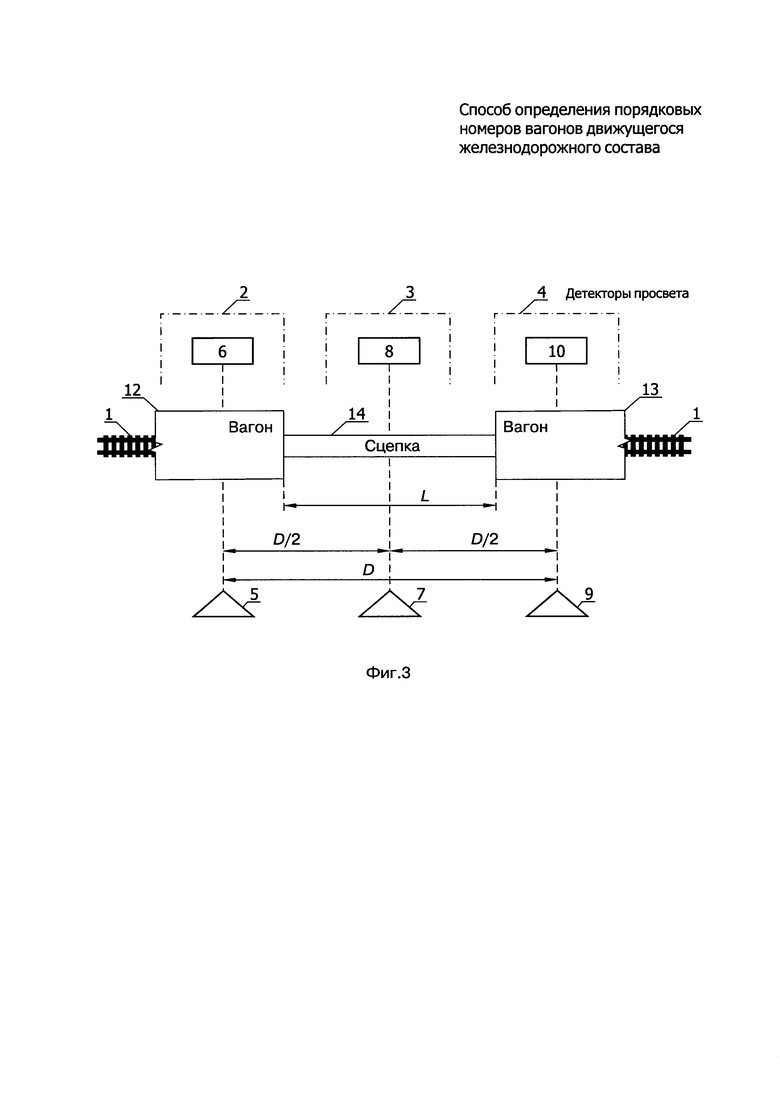
на фиг. 3 показан пример схемы установки трех детекторов просвета между вагонами вдоль железнодорожного пути, на котором показаны начало и конец двух соседних вагонов железнодорожного состава (вид сверху);
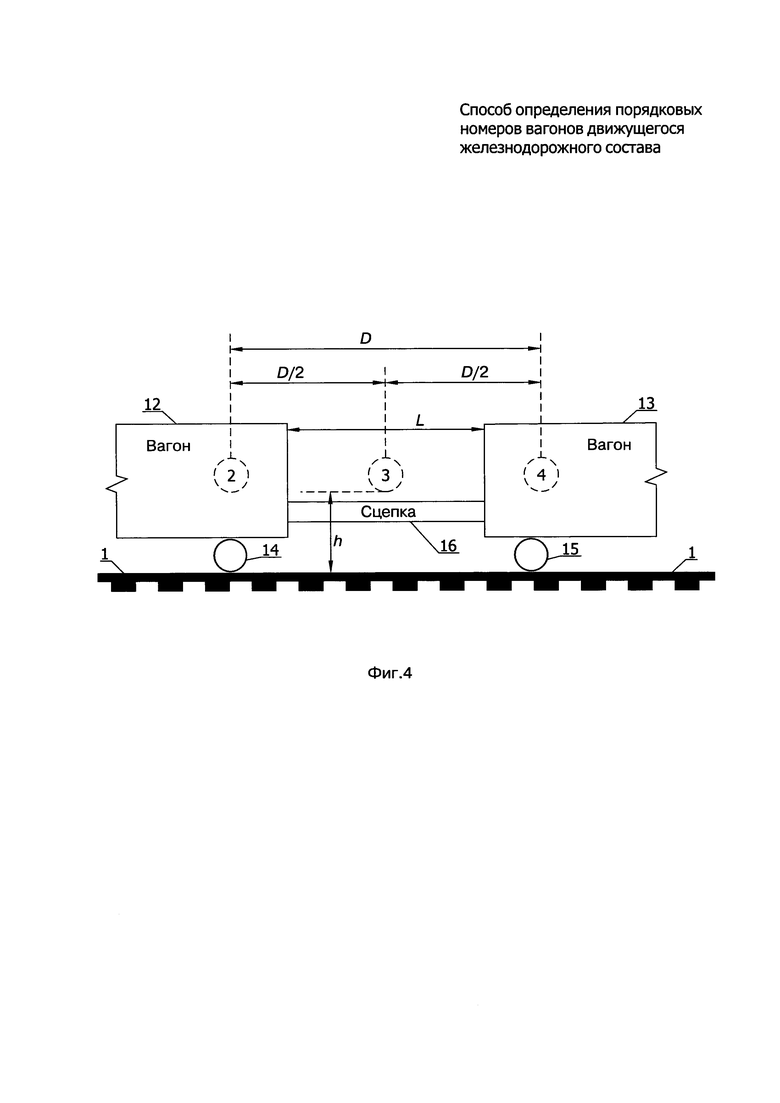
на фиг. 4 показан пример схемы установки трех детекторов просвета между вагонами вдоль железнодорожного пути, на котором показаны начало и конец двух соседних вагонов железнодорожного состава (вид сбоку);
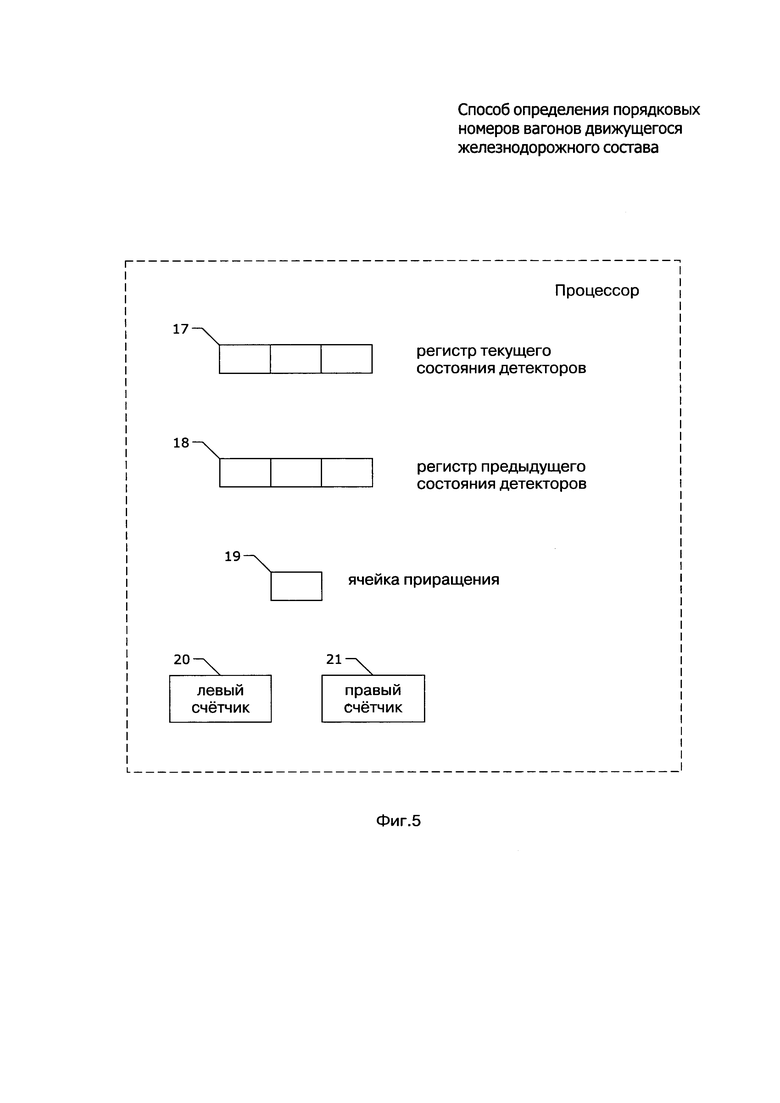
на фиг. 5 показан состав функциональных компонентов процессора, необходимых для осуществления предлагаемого способа и реализованных аппаратно или программно (в памяти процессора).
Осуществление изобретения
Предлагаемый способ предназначен для определения порядковых номеров вагонов движущегося железнодорожного состава и основан на применении детекторов просветов между вагонами с использованием электромагнитного излучения для детектирования. Предлагаемый способ содержит этап подготовки и этап собственно определения порядковых номеров вагонов.
Предварительно на этапе подготовки выполняют действия по установке детекторов просвета между вагонами в соответствии со схемами, показанными на фиг. 1-4.
На контролируемом участке железнодорожного пути 1 перемещения состава устанавливают три детектора 2, 3 и 4 просвета между вагонами на равных расстояниях между ними так, что каждый детектор 2, 3, 4 фиксирует просвет между вагонами вдоль своей контрольной прямой линии передачи электромагнитного излучения, находящейся в вертикальной плоскости, перпендикулярной направлению пути 1. Контрольная линия детектора 2 обозначена АА, контрольная линия детектора 3 - ВВ, а контрольная линия детектора 4 - СС. Каждый детектор просвета состоит из излучателя и приемника, расположенных по разные стороны этого пути 1 по указанной контрольной линии, вдоль которой электромагнитные волны передаются от излучателя к приемнику. Так, детектор 2 состоит из излучателя 5 и приемника 6, детектор 3 - из излучателя 7 и приемника 8, а детектор 4 - из излучателя 9 и приемника 10. Излучатель в каждом детекторе 2, 3, 4 посылает некоторое электромагнитное излучение приемнику своего детектора и этот приемник формирует выходной логический сигнал состояния этого детектора, свидетельствующий о том, перекрыта контрольная линия этого детектора каким-либо предметом или нет. Как будет показано ниже, для большинства типов детекторов контрольная линия детектора соответствует лучу, посылаемому от излучателя детектора к его приемнику. Но для общего случая будем пользоваться термином «контрольная линия детектора», что, как будет показано ниже, важно при использовании детекторов, основанных на применении видеокамеры.
Приемники 6, 8, 10 этих детекторов соединены с процессором 11, который анализирует сигналы этих детекторов, на основе этого анализа определяет порядковый номер вагона и направление движения состава, а также в случае необходимости число добавленных или отсоединенных вагонов после возвращения из контрольного участка пути, на который он предварительно въехал, что будет рассмотрено ниже.
Детекторы 2, 3 и 4 не обязательно устанавливать так, как показано на фиг. 1, для случая, когда приемники 5, 7 и 9 всех этих детекторов расположены с одной стороны этого пути 1. При необходимости можно установить эти детекторы так, чтобы приемник одного из этих детекторов был расположен по одну сторону этого пути, а приемники двух других детекторов были бы расположены по другую сторону этого пути. Пример такой установки детекторов показан на фиг. 2. В этом примере детектор 4 установлен так, что его излучатель 9 расположен с той же стороны пути 1, с какой расположены приемники 5 и 7 детекторов 2 и 3 соответственно.
На фиг. 3 и фиг. 4 показана установка детекторов 2, 3 и 4 с их излучателями 5, 7 и 9 и приемниками 6, 8 и 10 относительно начала и конца соседних вагонов 12 и 13 с колесами 14 и 15 соответственно. Вагоны 12 и 13 соединены сцепным устройством 16, или, иначе говоря, сцепкой. При горизонтальном расположении контрольной линии детекторов 2, 3 и 4 их устанавливают на высоте h от пути 1, превышающей высоту установки сцепного устройства 16.
При установке детекторов 2, 3 и 4 вдоль железнодорожного пути 1 выполняют следующие условия:
где Lmax и Lmin - максимальное и минимальное значения длины L промежутка между вагонами соответственно, или иначе длины просвета между вагонами (длина L показана на фиг. 3 и фиг. 4),
D - расстояние между крайними детекторами (см. фиг. 1-4 - расстояние между контрольными линиями этих детекторов),
ΔS - максимальное возможное смещение состава за время между двумя последовательными моментами получения логических сигналов о состоянии детекторов,
Н - длина вагона.
При выполнении условия (1) одновременно фиксировать просвет между вагонами могут не более двух соседних из трех указанных детекторов 2, 3 и 4 либо только один их них. Другими словами, одновременно не заслоненными вагонами могут оказаться либо два соседних из этих трех детекторов либо один их них. Здесь под заслонением детектора вагоном понимается перекрытие вагоном контрольной линии передачи излучения в этом детекторе.
Длина L просвета между вагонами определяется расстоянием, на которое должен сместиться состав от момента, когда контрольная линия любого детектора перестает перекрываться предыдущим вагоном, до момента, когда затем та же контрольная линия начнет перекрываться следующим вагоном. Длина L этого просвета будет зависеть от конструкции каждого вагона и их сцепного устройства (или, иначе говоря, сцепки) и от расположения контрольной линии детектора относительно элементов этой конструкции, которые могут ее перекрывать.
В случае, когда все составы, проходящие через точку контроля, состоят из локомотива и цистерн, что может иметь место на нефтеперерабатывающем предприятии, то контрольную линию детектора можно направить строго параллельно земле на некоторой высоте над уровнем сцепного устройства, например на уровне половины высоты цистерны. Однако, если среди вагонов возможно появление платформ без груза, то установленная так контрольная линия детектора вообще не будет перекрываться платформами. Для того чтобы сцепное устройство не перекрывало контрольную линию детектора, а платформы перекрывали ее, эту контрольную линию следует направить под углом в вертикальной плоскости, чтобы она проходила над сцепным устройством и гарантировано перекрывалась, например, рамой платформы.
Но даже и при наклонной установке контрольной линии детектора (на чертежах не показано) из-за возможных различий в конструкциях вагонов длина просвета между вагонами может варьировать от минимального (Lmin) до максимального (Lmax) значений, указанных выше в условии (1). Поэтому при осуществлении предлагаемого способа необходимо установить контрольные линии детекторов так, чтобы выполнялись сформулированное выше условие (1). Если разнообразие типов проходящих вагонов ограничено, то можно обойтись без наклонной установки контрольной линии детекторов, что по ряду причин может оказаться предпочтительней. В этом случае, например, не потребуется располагать нижний конец контрольной линии детектора, соответствующий приемнику или излучателю детектора, близко к рельсам и низко над уровнем земли.
В детекторах просвета могут быть использованы различные виды электромагнитного излучения (видимый свет, инфракрасное излучение, радиоволны) и разные принципы действия, определяющие различное выполнение излучателей и приемников. Подавляющее число возможных детекторов просвета относится к категории лучевых детекторов. В них излучатель является источником некоторого электромагнитного излучения, посылаемого в виде луча вдоль указанной контрольной линии приемнику, который формирует логический сигнал состояния детектора, свидетельствующий о том, перекрыт этот луч каким-либо предметом или нет.
В однолучевом фотоэлектрическом детекторе просвета излучателем является осветитель, направляющий узкий луч на приемник, в качестве которого используется фотоэлектронное реле. В качестве фотоэлектрического детектора может быть также использован световой барьер с одним осветителем, испускающим расположенный в вертикальной плоскости расширяющийся световой луч, и множеством элементарных фотоприемников, воспринимающих расширенную часть этого луча и логически объединенных в один приемник таким образом, что он выдает сигнал о просвете между вагонами, если не перекрыты какими-либо предметами все входящие в него элементарные фотоприемники.
В инфракрасных лучевых детекторах используют инфракрасный излучатель. В лазерном детекторе просвета излучателем является лазер (см., например, патент США № US 7,328,871, опубл. 2008, по классу США 246/169R, "Railroad car coupler gap analyzer"), а в радиолучевом детекторе излучателем является СВЧ-генератор.
Кроме лучевых детекторов просвета может быть использован детектор, основанный на анализе изображений (см., например, патент США № US 7,328,871, опубл. 2008, по классу США 246/169R, "Railroad car coupler gap analyzer"). В этом детекторе просвета в качестве излучателя используют освещаемую пластину с контрастным изображением, отражающую падающий на нее свет, а в качестве приемника используют соединенную с процессором видеокамеру. Рассмотрим этот тип детектора просвета более подробно.
Контрастное эталонное изображение на этой пластине, служащей визуальным маркером, называют паттерном. Эту пластину устанавливают в поле зрения видеокамеры, ориентированной перпендикулярно железнодорожному пути на противоположной видеокамере стороне пути так, чтобы паттерн был полностью виден видеокамере сквозь межвагонный просвет, но был бы не виден видеокамере в моменты, когда контрольная линия между видеокамерой и паттерном полностью или в значительной мере перекрыта вагонами.
Сохраняют в памяти процессора даваемые видеокамерой одно или несколько прямоугольных изображений той части участка паттерна, которая обязательно перекрывается при прохождении вагонов, но остается видимой сквозь межвагонный просвет, а также сохраняют в этой памяти координаты этого прямоугольного участка в кадре. Из полученных изображений с помощью процессора выбирают одно в качестве эталонного или же для уменьшения влияния шума и улучшения распознавания паттерна, из нескольких полученных изображений формируют одно эталонное, например, путем усреднения.
Далее на каждом приходящем от видеокамеры кадре с помощью процессора анализируют на сходство с эталоном один и тот же участок кадра, определяемый сохраненными координатами и размером эталонного изображения; причем выбирают меру сходства, которая нечувствительна к общему изменению яркости эталона или ограниченному изменению контраста сравниваемого с ним участка кадра. Если показатель сходства превышает некоторый порог, устанавливаемый в ходе предварительных сравнений, то принимают, что на контрольной линии, идущей от видеокамеры к центру паттерна, располагается межвагонный просвет (промежуток). В противном случае принимают, что эта линия перекрыта вагоном.
В предлагаемом способе могут быть применены любые детекторы просвета, в которых используется электромагнитное излучение, в том числе все указанные выше типы детекторов. При этом при осуществлении предлагаемого способа одновременно могут быть использованы разные типы детекторов просвета. В частности, например, хотя бы один из трех детекторов просвета может быть фотоэлектрическим, а также лазерным, инфракрасным, радиолучевым и построенным с применением видеокамеры и светового маркера на основе анализа изображений.
На этапе подготовки выполняют также следующие действия по аппаратной или программной реализации функциональных компонентов процессора 11, необходимых для осуществления предлагаемого способа (фиг. 5). В процессоре 11, соединенном с приемниками 6, 8 и 10 детекторов 2, 3 и 4 соответственно, реализуют регистр 17 текущего состояния указанных детекторов, регистр 18 предыдущего состояния указанных детекторов, ячейку 19 приращения Δ номера вагона, которое может принимать значения «1» и «-1», а также левый счетчик 20 и правый счетчик 21 номеров вагонов. Из них левый счетчик 20 предназначен для регистрации номера вагона, перекрывающего левый детектор 2 или находящегося левее его, а правый счетчик 21 предназначен для регистрации номера вагона, перекрывающего правый детектор 4 или находящегося правее его, причем левым и правым детектором считают крайние детекторы по выбору потребителя. Регистры 17 и 18 предназначены для хранения соответственно текущего и предыдущего состояний выходных логических сигналов детекторов 2, 3 и 4. При этом каждый из регистров 17 и 18 предназначен для хранения кортежа состояний этих трех детекторов, имеющего вид <x, y, z>. В этом кортеже буквы x и z означают состояния крайних детекторов, а буква y означает состояние центрального детектора. Каждое состояние детектора, обозначаемое выше в указанном кортеже буквой x, y и z, может принимать два значения, условно обозначаемые ƒ и с, где ƒ - значение выходного логического сигнала детектора, соответствующее случаю, когда контрольная линия детектора не перекрыта вагоном, с - значение выходного логического сигнала детектора, соответствующее случаю, когда контрольная линия детектора перекрыта вагоном. Здесь обозначение ƒ соответствует слову free (свободен), а обозначение с соответствует слову closed (закрыт). Цифровое кодирование значений ƒ и с может быть различным. Например, значению f может соответствовать логический сигнал 0, а значению с может соответствовать логический сигнал 1. В процессоре 11 обеспечивают прием логических сигналов ƒ и с, появившихся на выходов детекторов 2, 3 и 4, в регистр 17 текущего состояния детекторов либо при опросе выходов этих детекторов с некоторой заданной тактовой частотой, либо при изменении состояния хотя бы одного из этих детекторов.
Рассмотрим теперь предлагаемый способ на этапе определения порядковых номеров вагонов движущегося железнодорожного состава. На этом этапе выполняют в процессоре следующие действия:
- получают выходные логические сигналы трех детекторов 2, 3, 4 и передают их в регистр 17 текущего состояния детекторов, а предыдущее значение регистра 17 передают в регистр 18 предыдущего состояния детекторов, причем в каждом из этих регистров располагают кортеж состояний трех детекторов, имеющий вид <x, y, z>, описанный выше,
- при помощи процессора 11 анализируют содержимое регистров 17 и 18 состояния детекторов и формируют содержимое счетчиков 20 и 21 по следующим правилам:
a) если текущее состояние детекторов <ƒ, ƒ, ƒ>, то в обоих счетчиках устанавливают 0$
b) если текущее значение детекторов <c, ƒ, ƒ>, а предыдущее их значение <ƒ, ƒ, ƒ>, то устанавливают 1 в левом счетчике и в значении приращения Δ;
если текущее значение детекторов <ƒ, ƒ, с>, а предыдущее их значение <ƒ, ƒ, ƒ>, то устанавливают 1 в правом счетчике и -1 в значении приращения Δ;
c) если текущее значение детекторов <с, с, с> и предыдущее их значение <ƒ, с, с>, то в левый счетчик 20 устанавливают значение правого счетчика 21, но если при том же текущем значении детекторов их предыдущее значение <с, c, ƒ>, то в правый счетчик 22 устанавливают значение левого счетчика 21;
d) если предыдущее значение детекторов <с, с, с> и текущее значение <ƒ, с, с>, то к значению левого счетчика 21 добавляют приращение Δ, но если при том же предыдущем значении детекторов их текущее значение <с, с, ƒ>, то из значения правого счетчика 20 вычитают приращение Δ.
Одновременно с выполнением указанных правил а), b), с), d) при помощи процессора 11 анализируют состояния детекторов в регистрах 17 и 18, и по тем же сочетаниям содержимого этих регистров, которые указаны в приведенных выше правилах а), b), с, d), определяют направление движения состава и формируют код движения состава вправо или влево по следующим правилам:
а’) если текущее состояние детекторов <ƒ, ƒ, ƒ>, предыдущее их состояние <c, ƒ, ƒ>, то формируют код движения состава влево, а если при том же текущем состоянии детекторов предыдущее их состояние <f, ƒ, с>, то формируют код движения состава вправо;
b’) если предыдущее состояние детекторов <ƒ, ƒ, ƒ>, а текущее их состояние <c, ƒ, ƒ>, то формируют код движения состава вправо, а если при том же предыдущем состоянии детекторов их текущее состояние <f, ƒ, с>, то формируют код движения состава влево;
с’) если текущее состояние детекторов <с, с, с>, а предыдущее их состояние <ƒ, с, с>, то формируют код движения состава влево, но если при том же текущем состоянии детекторов предыдущее их состояние <с, с, ƒ>, то формируют код движения состава вправо;
d’) если предыдущее состояние детекторов <с, с, с>, а текущее их состояние <ƒ, с, с>, то формируют код движения состава вправо, но если при том же предыдущем состоянии детекторов их текущее состояние <с, с, ƒ>, то формируют код движения состава влево.
По запросу от внешней системы (на чертежах не показана) содержимое счетчиков 20 и 21 и полученные коды направления движения передают из процессора 11 в эту систему в качестве результатов определения порядковых номеров вагонов и направления движения состава.
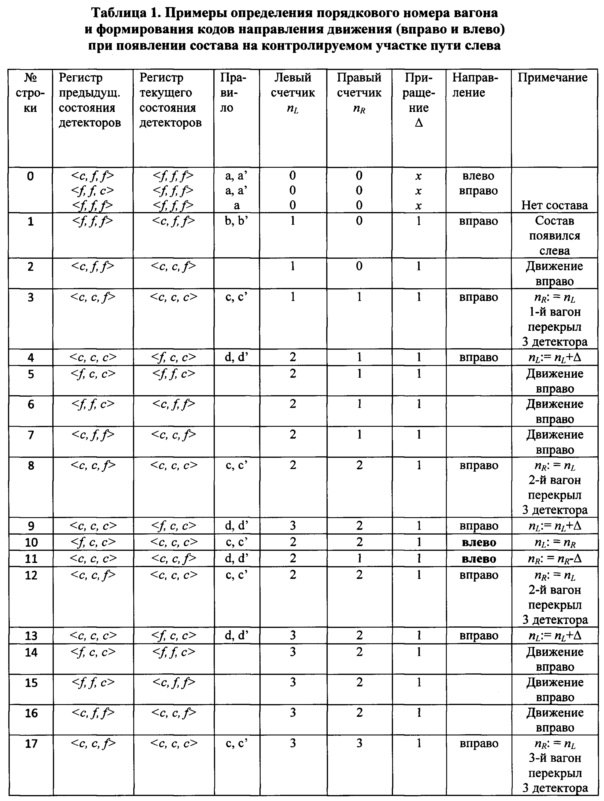
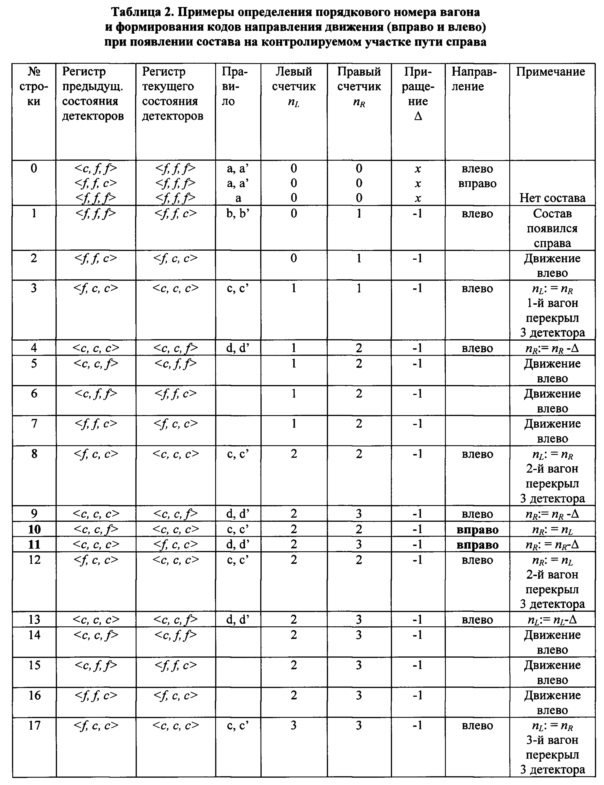
В таблицах 1 и 2 приведены примеры определения порядкового номера вагона и формирования кодов направления движения (вправо и влево) предлагаемым способом при появлении состава на контролируемом участке пути слева (см. таблицу 1) или справа (см. таблицу 2).
Эти таблицы представляют последовательность ситуаций, возникающих в процессе осуществления предлагаемого способа при движении состава. Каждая из этих ситуаций описывается строкой таблицы и определена сочетанием кортежа текущего состояния детекторов в регистре 17 и кортежа предыдущего состояния детекторов в регистре 18. Строки имеют номера - 0, 1, 2, …17. В начальной, 0-й, строке указаны три ситуации, в которых описаны соответственно три возможных случая перехода трех разных кортежей предыдущего состояния детекторов в один и тот же кортеж <ƒ, ƒ, ƒ> текущего состояния детекторов. Каждая следующая строка таблицы описывает только одну ситуацию, непосредственно следующую за предыдущей при движении состава вправо или влево, при условии, что ситуация изменилась, если изменились кортежи в регистрах 17 и 18. Одинаковые ситуации, которые возникают при прохождении вагонов мимо контрольного участка в строках этих таблиц, кроме 0-й строки, не указаны. При этом для упрощения принято, что каждая следующая ситуация образуется при перемещении состава на расстояние между соседними детекторами.
В каждой строке, кроме обязательных кортежей текущего и предыдущего состояния регистров 17 и 18 указаны:
- обозначение правила а), b), с) или d), используемого в предлагаемом способе для формирования содержимого левого счетчика 20 и правого счетчика 21 и описанного выше, а также обозначение правила а’), b’), с’) или d’), используемого для формирования кода движения вправо или влево, причем если в ситуации, описанной в этой строке, ни одно из этих правил не используется, то соответствующая клетка таблицы остается свободной;
- содержимое nL левого счетчика 20 и содержимое nR правого счетчика 21, сформированные после применения правила а), b), с) или d), указанного в этой строке или оставшиеся неизменными;
- значение Δ приращения, установленное в ячейке 19 приращения номера вагона в результате выполнения правила b), при этом значение Δ приращения в 0-й строке безразлично и поэтому обозначено буквой х, при выполнении правила а) его можно не изменять, но можно и обнулять;
- направление движения вправо или влево, код которого формируют по правилу b’), с’) или d’); причем в строках, в которых направление движения не указано, его код не формируют;
- примечание, в котором указана ситуация на контрольном участке пути и пояснены действия, выполняемые по правилам с) или d); например, выражение nR:=nL означает, что содержимое левого счетчика передают в правый счетчик, а выражение nL:=nL+Δ означает, что к содержимому левого счетчика прибавляют приращение Δ.
В примерах, приведенных в таблицах 1 и 2 для упрощения принято, что длина межвагонных просветов одинакова и фиксируется одновременно двумя соседними детекторами, имеющими состояние ƒ.
В таблицах 1 и 2 в примерах, приведенных в строках 10 и 11, показан случай, когда состав маневрирует, меняя направление движения, а затем продолжает движение в первоначальном направлении.
Рассмотрим теперь дополнительные возможности предлагаемого способа на этапе определения порядковых номеров вагонов движущегося железнодорожного состава, заключающиеся в контроле изменения числа вагонов в составе. После въезда первого вагона состава на контролируемый тремя детекторами участок состав может остановиться на некоторое время, в течение которого будут прицеплены к нему или отцеплены от него один или более вагонов. Тогда после выезда всего состава из этого контрольного участка в обратном направлении число вагонов изменится. В этом случае необходимо определить увеличение или уменьшение числа вагонов в выехавшем составе и число отсоединенных или добавленных вагонов.
Для этого в предлагаемом способе в процессоре контролируют изменение числа вагонов в указанном составе после того, как он выехал из контролируемого указанными тремя детекторами участка пути в направлении, противоположном направлению, в котором первый вагон этого состава въехал на указанный контролируемый участок. При этом в процессоре формируют коды увеличения или уменьшения числа вагонов в составе и число отсоединенных или добавленных вагонов в этом составе по следующим правилам:
- если последний вагон состава выехал из этого участка пути влево, то перед обнулением левого и правого счетчиков, осуществляемом при освобождении контролируемого участка от последнего вагона, формируют код уменьшения числа вагонов в той части состава, которая прошла контролируемый участок, если значение левого счетчика 20 больше единицы, и формируют код увеличения числа вагонов в этой части состава, если значение этого счетчика меньше единицы, а число отсоединенных или добавленных вагонов определяют как абсолютное значение правого счетчика;
- если последний вагон состава выехал из этого участка пути вправо, то перед обнулением левого и правого счетчиков, осуществляемом при освобождении контролируемого участка от последнего вагона, формируют код уменьшения числа вагонов в той части состава, которая прошла контролируемый участок, если значение правого счетчика 21 больше единицы, и формируют код увеличении числа вагонов в этой части состава, если значение этого счетчика меньше единицы, а число отсоединенных или добавленных вагонов определяют как абсолютное значение левого счетчика.
По запросу от внешней системы (на чертежах не показана) полученные коды изменения (уменьшения или увеличения) числа вагонов и число отсоединенных или добавленных вагонов передают из процессора 11 в эту систему в качестве результатов контроля изменения числа вагонов в указанном составе.
Осуществление контроля изменения числа вагонов в составе предлагаемым способом иллюстрируется примерами, приведенными в таблицах 3, 4 и 5.
В таблице 3 показан пример определения порядкового номера вагона при въезде состава на контролируемый участок пути слева до момента, когда второй вагон перекрыл правый детектор. В таблицах 4 и 5 показаны примеры контроля увеличения и уменьшения числа вагонов при выезде всего состава из контролируемого участка с момента, отраженного в конце таблицы 3, когда при въезде на этот участок второй вагон перекрыл правый детектор. Пример в таблице 4 описывает случай, когда справа прицеплен (добавлен) один вагон, а пример в таблице 5 описывает случай, когда справа отцеплен (отсоединен) один вагон. Таблицы 3, 4 и 5 построены аналогично тому, как построена описанная выше таблица 1 за исключением того, что в этих таблицах не показан столбец «Направление», поскольку он для контроля изменения числа вагонов не используется, а в столбце «Правило» не указаны правила формирования кода направления движения.
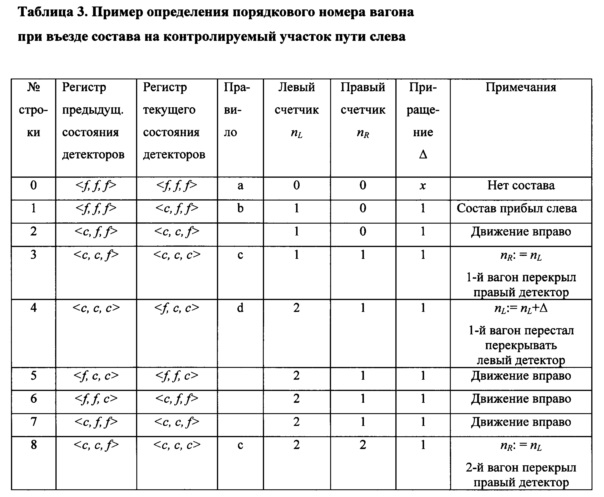
Таблицы 4 и 5 продолжают таблицу 3 и поэтому нумерация строк в них начинается с 9-й строки.
 )
)
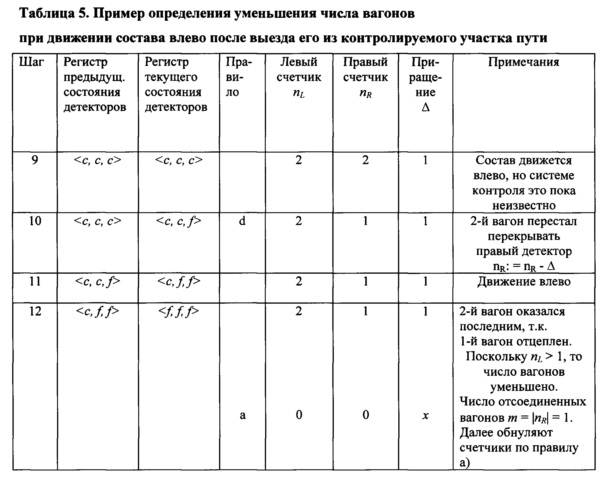
Отметим, что в последних строках таблиц 4 и 5 показано, что то перед обнулением левого и правого счетчиков по правилу а), осуществляемом при освобождении контролируемого участка от последнего вагона, т.е. при значении <ƒ, ƒ, ƒ> текущего состояния детекторов, сначала формируют код изменения (увеличения или уменьшения) числа вагонов в той части состава, которая прошла контролируемый участок, и число m отсоединенных или добавленных вагонов, и только после этого обнуляют левый и правый счетчики по правилу а).
Все полученные результаты (значения левого и правого счетчиков, кодов направления движения, кодов изменения (увеличения или уменьшения) числа вагонов в составе и числа отсоединенных и добавленных вагонов) могут быть переданы во внешнюю систему (на чертеже не показана), например, для ведения электронного журнала регистрации, или, иначе говоря, для легирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для опознавания железнодорожных вагонов | 1988 |
|
SU1558753A1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ В СОСТАВАХ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2015 |
|
RU2605127C1 |
| Процессор для идентификации и адресования событий | 1983 |
|
SU1188748A1 |
| УСТРОЙСТВО СЧЕТА ВАГОНОВ | 2018 |
|
RU2683705C1 |
| Система сбора и представления информации о транспортных средствах | 1988 |
|
SU1596364A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА ПОЕЗДОВ И ВАГОНОВ (АСКО ПВ) | 2004 |
|
RU2252170C1 |
| СПОСОБ ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ ДРОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662297C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ИДЕНТИФИКАЦИИ ДЛЯ ДВУХПУТНЫХ УЧАСТКОВ ЖЕЛЕЗНЫХ ДОРОГ | 2005 |
|
RU2314955C2 |
| Автоматизированная система контроля инвентарных номеров вагонов | 2018 |
|
RU2682126C1 |
| КОМПЛЕКС АВТОМАТИЗИРОВАННОГО УЧЕТА ВАГОНООБОРОТА | 2011 |
|
RU2500562C2 |
Изобретение относится к области железнодорожной автоматики для определения порядковых номеров вагонов движущегося железнодорожного состава. Способ основан на детектировании просветов между вагонами с использованием электромагнитного излучения, в котором вдоль пути состава устанавливают три детектора просвета между вагонами на равных расстояниях между ними и при этом выполняют условия: Lmax≤D≤2·Lmin, D/2≥ΔS, где Lmax и Lmin - максимальное и минимальное значения длины L просвета между вагонами соответственно, D - расстояние между крайними детекторами, ΔS - максимальное возможное смещение состава за время между двумя последовательными моментами получения логических сигналов о состоянии детекторов. При помощи процессора анализируют текущее и предыдущее состояния детекторов, формируют значения счетчиков числа вагонов, коды направления движения и изменения числа вагонов в составе. Достигается возможность определения порядковых номеров вагонов разных типов, направления движения и изменения числа вагонов при маневрировании состава, а также использования различных типов детекторов просвета между вагонами. 7 з.п. ф-лы, 5 табл., 5 ил.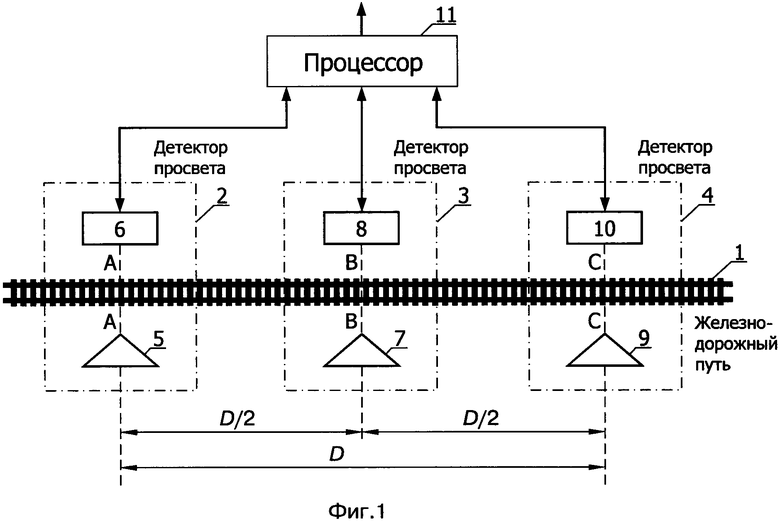
1. Способ определения порядковых номеров вагонов движущегося железнодорожного состава, основанный на детектировании просветов между вагонами с использованием для этого электромагнитного излучения, отличающийся тем, что предварительно на этапе подготовки выполняют следующие действия:
- на контролируемом участке пути перемещения этого состава устанавливают три детектора просвета между вагонами на равных расстояниях между ними так, что каждый детектор фиксирует просвет между вагонами вдоль своей контрольной прямой линии передачи излучения, находящейся в вертикальной плоскости, перпендикулярной направлению пути, и при этом выполняют следующие условия:
Lmax≤D≤2·Lmin,
D/2≥ΔS,
где Lmax и Lmin - максимальное и минимальное значения длины L просвета между вагонами соответственно,
D - расстояние между крайними детекторами,
ΔS - максимальное возможное смещение состава за время между двумя последовательными моментами получения логических сигналов о состоянии детекторов,
- в процессоре реализуют регистры текущего и предыдущего состояний детекторов, получаемых в соседние моменты времени, ячейку приращения Δ номера вагона, которое может принимать значения «1» и «-1» а также левый и правый счетчики номеров вагонов, из которых левый счетчик предназначен для регистрации номера вагона, перекрывающего левый детектор или находящегося левее его, а правый счетчик предназначен для регистрации номера вагона, перекрывающего правый детектор или находящегося правее его, причем левым и правым детектором считают крайние детекторы по выбору потребителя,
а затем на этапе определения номеров вагонов движущегося состава выполняют в процессоре следующие действия:
- получают выходные логические сигналы трех детекторов и передают их в регистр текущего состояния детекторов, а его предыдущее значение передают в регистр предыдущего состояния детекторов, причем в каждом из этих регистров располагают кортеж состояний трех детекторов, имеющий вид <х, у, z>, в котором каждая буква означает состояние одного детектора, которое может принимать два значения, условно обозначаемые f и с, где f - значение выходного логического сигнала детектора, соответствующее случаю, когда контрольная линия детектора не перекрыта вагоном, с - значение выходного логического сигнала детектора, соответствующее случаю, когда контрольная линия детектора перекрыта вагоном, а левая буква указанного кортежа соответствует левому детектору,
- при помощи процессора анализируют содержимое регистров состояния детекторов и формируют содержимое счетчиков по следующим правилам:
a) если текущее состояние детекторов < f , f , f >, то в обоих счетчиках устанавливают 0;
b) если текущее значение детекторов <с, f , f >, а предыдущее их значение < f , f , f >, то устанавливают 1 в левом счетчике и в значении приращения Δ;
если текущее значение детекторов < f , f , с>, а предыдущее их значение < f , f , f >, то устанавливают 1 в правом счетчике и -1 в значении приращения Δ;
c) если текущее значение детекторов <с, с, с> и предыдущее их значение < f , с, с>, то в левый счетчик устанавливают значение правого счетчика, но если при том же текущем значении детекторов их предыдущее значение <с, с, f >, то в правый счетчик устанавливают значение левого счетчика;
d) если предыдущее значение детекторов <с, с, с> и текущее значение < f , с, с>, то к значению левого счетчика добавляют приращение Δ, но если при том же предыдущем значении детекторов их текущее значение <с, с, f ,>, то из значения правого счетчика вычитают приращение Δ.
2. Способ по п. 1, отличающийся тем, что в процессоре определяют направление движения состава и формируют код движения вправо или влево по следующим правилам:
а') если текущее состояние детекторов < f , f , f >, предыдущее их состояние <с, f , f >, то формируют код движения состава влево, а если при том же текущем состоянии детекторов предыдущее их состояние < f , f , с>, то формируют код движения состава вправо;
b') если предыдущее состояние детекторов < f , f , f >, а текущее их состояние <с, f , f >, то формируют код движения состава вправо, а если при том же предыдущем состоянии детекторов их текущее состояние < f , f , с>, то формируют код движения состава влево;
с') если текущее состояние детекторов <с, с, с>, а предыдущее их состояние < f , с, с>, то формируют код движения состава влево, но если при том же текущем состоянии детекторов предыдущее их состояние <с, с, f ,>, то формируют код движения состава вправо;
d') если предыдущее состояние детекторов <с, с, с>, а текущее их состояние < f , с, с>, то формируют код движения состава вправо, но если при том же предыдущем состоянии детекторов их текущее состояние <с, c, f ,>, то формируют код движения состава влево.
3. Способ по п. 1, отличающийся тем, что в процессоре контролируют изменение числа вагонов в указанном составе после того, как он выехал из контролируемого указанными тремя детекторами участка пути в направлении, противоположном направлению, в котором первый вагон этого состава въехал на указанный контролируемый участок, при этом в процессоре формируют коды увеличения или уменьшения числа вагонов в составе и число отсоединенных или добавленных вагонов в этом составе по следующим правилам:
- если последний вагон состава выехал из этого участка пути влево, то перед обнулением левого и правого счетчиков, осуществляемом при освобождении контролируемого участка от последнего вагона, формируют код уменьшения числа вагонов в той части состава, которая прошла контролируемый участок, если значение левого счетчика больше единицы, и формируют код увеличения числа вагонов в этой части состава, если значение этого счетчика меньше единицы, а число отсоединенных или добавленных вагонов определяют как абсолютное значение правого счетчика;
- если последний вагон состава выехал из этого участка пути вправо, то перед обнулением левого и правого счетчиков, осуществляемом при освобождении контролируемого участка от последнего вагона, формируют код уменьшения числа вагонов в той части состава, которая прошла контролируемый участок, если значение правого счетчика больше единицы, и формируют код увеличении числа вагонов в этой части состава, если значение этого счетчика меньше единицы, а число отсоединенных или добавленных вагонов определяют как абсолютное значение левого счетчика.
4. Способ по п. 1, отличающийся тем, что в качестве хотя бы одного из трех детекторов используют фотоэлектрический детектор, излучатель и приемник которого устанавливают по разные стороны железнодорожного пути.
5. Способ по п. 1, отличающийся тем, что в качестве хотя бы одного из трех детекторов используют лазерный детектор, излучатель и приемник которого устанавливают по разные стороны железнодорожного пути.
6. Способ по п. 1, отличающийся тем, что в качестве хотя бы одного из трех детекторов используют инфракрасный детектор, излучатель и приемник которого устанавливают по разные стороны железнодорожного пути.
7. Способ по п. 1, отличающийся тем, что в качестве хотя бы одного из трех детекторов используют радиолучевой детектор, излучатель и приемник которого устанавливают по разные стороны железнодорожного пути.
8. Способ по п. 1, отличающийся тем, что в качестве хотя бы одного из трех детекторов используют соединенную с процессором видеокамеру и пластину с контрастным эталонным изображением, которые устанавливают по разные стороны железнодорожного пути так, что контрольная линия детектора идет от видеокамеры к центру эталонного изображения.
| Колосоуборка | 1923 |
|
SU2009A1 |
| КОМПЛЕКС АВТОМАТИЗИРОВАННОГО УЧЕТА ВАГОНООБОРОТА | 2011 |
|
RU2500562C2 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1992 |
|
RU2007693C1 |
| Сервопривод направляющего аппарата гидротурбин | 1961 |
|
SU146254A1 |

