Область техники
Изобретение относится к формированию изображений в области медицины и, в частности к способу, системе и компьютерному программному продукту для удаления артефактов от генератора электромагнитного поля из трехмерного снимка.
Уровень техники
Принцип, лежащий в основе электромагнитного (EM) отслеживания, состоит в том, что генератор поля производит переменные в пространстве магнитные поля, которые индуцируют токи в катушках датчика. Затем используется система измерения для вычисления позиции и ориентации датчиков на основе измеренных напряжений в датчиках. Методики электромагнитного отслеживания обеспечивают информацию о позиции и ориентации в реальном времени в трехмерном пространстве, что может быть использовано для помощи при хирургических процедурах. Поскольку размер катушек этих датчиков очень мал, они могут быть встроены в катетер или другой хирургический инструмент и использоваться для управляемой навигации. В результате системы электромагнитного отслеживания очень хорошо подходят для хирургических операций внутри тела пациента.
Когда электромагнитное отслеживание используется совместно с формированием рентгеновских изображений, например, при исследованиях с помощью катетера (cathlab), генераторы поля для электромагнитного отслеживания могут повредить рентгеновские изображения, особенно изображения компьютерной томографии с коническим лучом. Даже хотя были приложены усилия, чтобы спроектировать совместимые с рентгеновской системой генераторы поля, которые не показывают больших электронных компонентов в рентгеновском изображении, по-прежнему имеются признаки, которые могут произвести артефакты, видимые на рентгеновском изображении. Эти признаки включают в себя проводники, которые проходят от верхней до нижней части генератора поля, и острые края внешнего и внутреннего корпусов генератора поля. Эти признаки обычно вызывают артефакты в форме линий на рентгеновском изображении.
Документ US 8023767 направлен на систему для исправления трехмерных металлических и высокоплотных артефактов для изображений компьютерной томографии с коническим лучом и веерным лучом. D1 характеризует подобъекты (например, металлические имплантаты, изотопные источники и т.п.). Проекции подэлементов используются для масштабирования во время воссоздания в итеративном процессе сокращения ошибок.
Документ EP 1627601 направлен на способ уменьшения металлических артефактов при воссоздании изображения посредством калибровки трехмерного изображения и вычисления преобразования "пациент-передатчик" с использованием откалиброванного изображения. Определяется местоположение имплантата и используются методики фильтрации, усреднения или сглаживания для устранения артефактов в виде штрихов.
Сущность изобретения
Обеспечены способ, система и программный продукт для удаления артефактов от генератора электромагнитного поля из трехмерного снимка, полученного посредством вращательного сканирования.
В соответствии с одним аспектом настоящего изобретения обеспечен способ удаления артефактов от генератора электромагнитного поля из трехмерного снимка, полученного посредством вращательного сканирования. Способ содержит этапы, на которых: перед операцией определяют характеристики артефактов от генератора электромагнитного поля по диапазону угловых позиций источника и детектора рентгеновского излучения; во время операции определяют позицию генератора электромагнитного поля относительно источника и детектора рентгеновского излучения; и удаляют охарактеризованные перед операцией артефакты для определенной относительной позиции генератора электромагнитного поля из текущего рентгеновского изображения.
В соответствии с одним вариантом осуществления определение характеристик артефактов содержит определение коэффициентов затухания для каждого воксела каждого артефакта в каждой угловой позиции, и в которой удаление охарактеризованных перед операцией артефактов содержит вычитание коэффициентов затухания из текущего рентгеновского изображения.
В соответствии с одним вариантом осуществления способ удаления артефактов от генератора электромагнитного поля из трехмерного снимка, полученного посредством вращательного сканирования дополнительно содержит этап, на котором представляют текущее рентгеновское изображение на дисплее с удаленными артефактами.
В соответствии с одним вариантом осуществления определение характеристик артефактов дополнительно содержит определение формы каждого артефакта.
В соответствии с одним вариантом осуществления форма каждого артефакта определяется посредством определения артефактов с использованием процесса обнаружения границ.
В соответствии с другим аспектом настоящего изобретения обеспечена система для удаления артефактов от генератора электромагнитного поля из трехмерного снимка, полученного посредством вращательного сканирования. Система содержит: процессор; запоминающее устройство, функционально соединенное с процессором; и программу команд, закодированных на запоминающем устройстве и исполняемых процессором. При исполнении программа команд перед операцией определяет характеристики артефактов от генератора электромагнитного поля по диапазону угловых позиций источника и детектора рентгеновского излучения, во время операции определяет позицию генератора электромагнитного поля относительно источника и детектора рентгеновского излучения и удаляет охарактеризованные перед операцией артефакты для определенной относительной позиции генератора электромагнитного поля из текущего рентгеновского изображения.
В соответствии с одним вариантом осуществления система дополнительно содержит дисплей, функционально соединенный с процессором, причем программа команд при ее исполнении процессором представляет текущее рентгеновское изображение на дисплее с удаленными артефактами.
В соответствии с другим аспектом настоящего изобретения обеспечен компьютерный программный продукт, содержащий машиночитаемое устройство хранения, имеющее закодированную на нем исполняемую компьютером программу команд для удаления артефактов от генератора электромагнитного поля из трехмерного снимка, полученного посредством вращательного сканирования. Программа команд содержит: программные команды для определения перед операцией характеристик артефактов от генератора электромагнитного поля по диапазону угловых позиций источника и детектора рентгеновского излучения; программные команды для определения во время операции позиции генератора электромагнитного поля относительно источника и детектора рентгеновского излучения; и программные команды для удаления охарактеризованных перед операцией артефактов для определенной относительной позиции генератора электромагнитного поля из текущего рентгеновского изображения.
Краткое описание чертежей
Признаки и преимущества изобретения поясняются в следующем подробном описании предпочтительных вариантов осуществления со ссылками на сопроводительные чертежи. В чертежи включены следующие фигуры:
Фиг. 1 - изометрический вид системы для удаления артефактов от генератора электромагнитного поля из трехмерного снимка в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 2 - блок-схема системы для удаления артефактов от генератора электромагнитного поля из трехмерного снимка в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 3 - блок-схема последовательности операций способа удаления артефактов от генератора электромагнитного поля из трехмерного снимка в соответствии с вариантом осуществления настоящего изобретения.
Осуществление изобретения
Настоящее изобретение обеспечивает способ, систему и компьютерный программный продукт для удаления артефактов от генератора электромагнитного поля из трехмерного снимка. В соответствии с одним вариантом осуществления настоящего изобретения до операции определяются характеристики артефактов от генератора электромагнитного поля по диапазону угловых позиций источника и детектора рентгеновского излучения. Затем позиция генератора электромагнитного поля относительно источника и детектора рентгеновского излучения определяется во время операции, и охарактеризованные до операции артефакты для определенной относительной позиции генератора электромагнитного поля удаляются из текущего изображения.
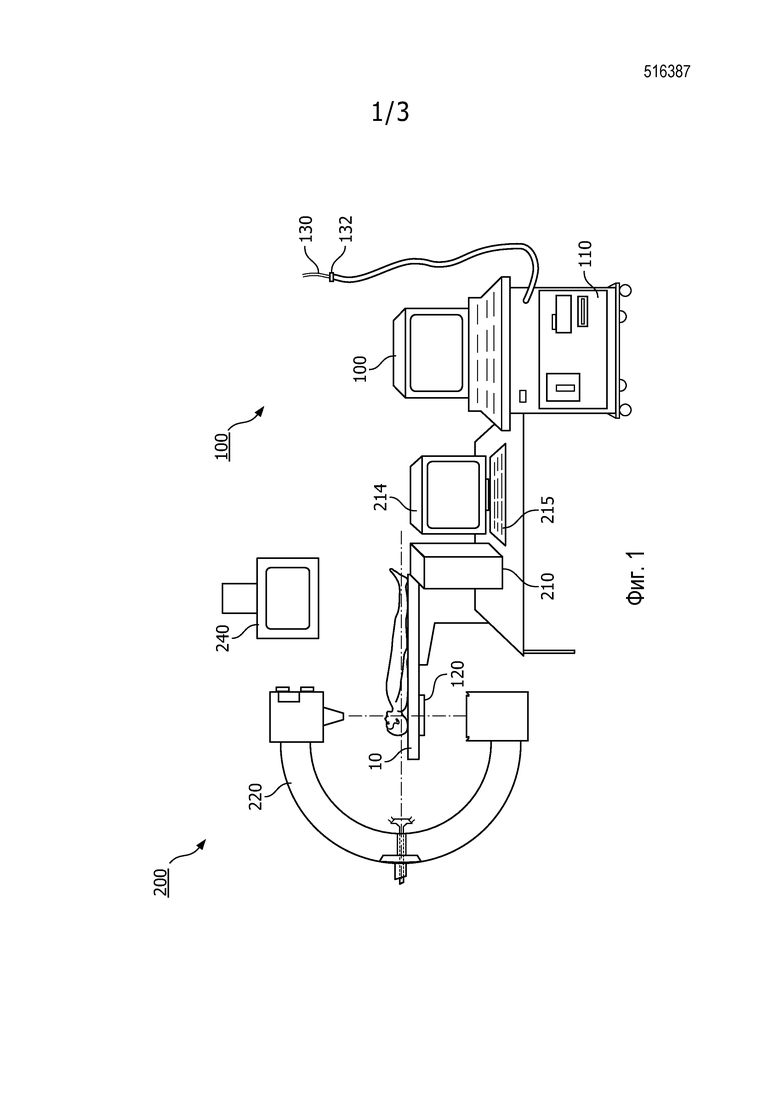
Фиг. 1 показывает систему для удаления артефактов от генератора электромагнитного поля из трехмерного снимка в соответствии с вариантом осуществления настоящего изобретения. Система содержит: систему 100 электромагнитного отслеживания и рентгеновскую систему 300, которые могут работать одновременно. Система 100 электромагнитного отслеживания используется для отслеживания местоположения инструмента во время операции, обычно катетера во время катетеризационного вмешательства. Рентгеновская система 200 используется для визуализации внутренних структур, движения жидкостей, движения тканей и т.п. во время хирургического вмешательства. Система 100 электромагнитного отслеживания включает в себя генератор 120 поля, который может вызывать артефакты в рентгеновских изображениях, особенно если рентгеновские изображения представляют собой изображения, полученные посредством вращательного сканирования, например, посредством компьютерной томографии (CT) с коническим лучом.
Рентгеновская система 200 содержит рентгеновский аппарат 220, размещенный для получения рентгеновских изображений пациента на столе 10. В соответствии с одним вариантом осуществления рентгеновский аппарат представляет собой сканер с C-образной рамой.
Блок 210 обработки, такой как компьютер общего назначения, функционально соединен с рентгеновским аппаратом и обрабатывает рентгеновские изображения от рентгеновского аппарата 220. Обработанное изображение может быть представлено на дисплее 214.
Система также содержит систему 200 электромагнитного (EM) отслеживания для отслеживания хирургического инструмента в режиме реального времени во время операции. Система 100 электромагнитного отслеживания содержит блок 110 обработки для обработки данных электромагнитного отслеживания, датчик 132, содержащий проводящую катушку для обнаружения электромагнитного поля и генератор 120 поля, который формирует электромагнитные поля. Датчик 132 соединен с хирургическим инструментом 130, таким как катетер.
Блок 110 обработки системы электромагнитного отслеживания вычисляет позицию инструмента 130 в трехмерном пространстве с использованием напряжений, сформированных в датчике 132 вследствие магнитного поля, сформированного генератором 120 поля. Система 100 электромагнитного отслеживания совмещается с рентгеновской системой 200, например, посредством процедуры калибровки. Представление инструмента 130 может быть наложено на рентгеновское изображение или модель, сформированную из рентгеновской системы посредством блока 210 обработки рентгеновской системы с использованием отслеженного местоположения. Рентгеновское изображение с наложенным инструментом может быть представлено на дисплее 240.
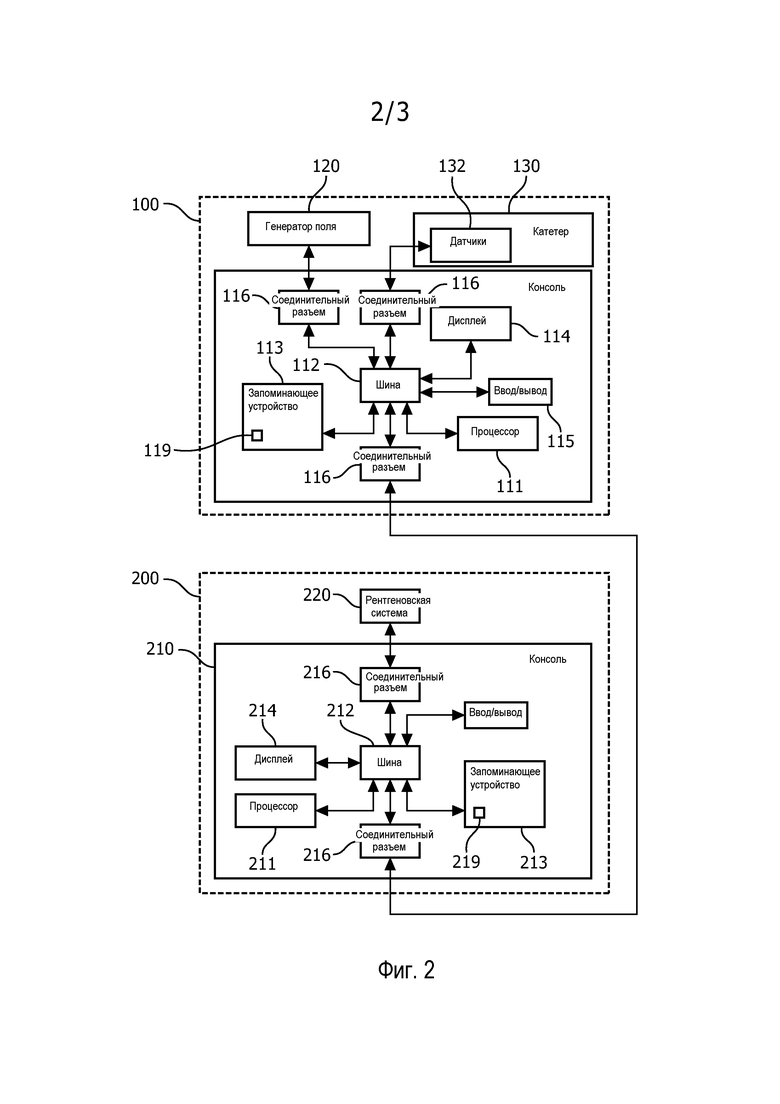
Фиг. 2 является блок-схемой системы для удаления артефактов от генератора электромагнитного поля из трехмерного снимка в соответствии с вариантом осуществления настоящего изобретения. Система 100 электромагнитного отслеживания содержит блок 110 обработки (фиг. 1), генератор 120 поля и датчик 132. Блок 110 обработки содержит процессор 111 и запоминающее устройство 113. Процессор 111 функционально соединен с запоминающим устройством 113. В соответствии с одним вариантом осуществления они соединены через шину 112. Процессор 111 может представлять собой любое устройство, способное исполнять программные команды, например, один или несколько микропроцессоров. Кроме того, процессор 111 может быть воплощен в компьютере общего назначения.
Запоминающее устройство 113 может являться любым энергозависимым или энергонезависимым запоминающим устройством, подходящим для хранения данных и программных команд, например съемным диском, накопителем на жестком диске, компакт-диском (CD), оперативным запоминающим устройством (RAM), постоянным запоминающим устройством (ROM) и т.п. Кроме того, запоминающее устройство 113 может содержать одно или несколько запоминающих устройств.
Блок 110 обработки может дополнительно содержать один или несколько сетевых разъемов 116 для отправки или приема рентгеновских и других данных. Сетевые разъемы 116 могут представлять собой разъемы универсальной последовательной шины (USB), интернет-адаптеры или любой другой соединительный элемент, подходящий для приема данных от другого устройства либо непосредственно, либо через сеть, такую как интранет или Интернет.
Блок 110 обработки также может содержать дисплей 114, такой как монитор, для отображения изображений отслеживания, анатомических моделей и т.п. Могут быть обеспечены один или несколько мониторов либо в дополнение к специализированным мониторам для системы 100 электромагнитного отслеживания и для рентгеновской системы 200, либо вместо них.
Дополнительные устройства 115 ввода и/или вывода (I/O), такие как клавиатура, мышь и т.п., могут быть обеспечены как часть пользовательского интерфейса для приема указаний от пользователя, таких как выбор точки и навигация в пределах изображения на дисплее 114.
Запоминающее устройство 113 имеет закодированную на нем программу команд 119, исполнимых посредством процессора 111, для обработки и отображения данных электромагнитного отслеживания, таких как местоположение датчика 132 на хирургическом инструменте 130, наложенное на изображение или модель на основе формирования рентгеновского изображения.
Рентгеновская система 200 также содержит блок 210 обработки. Блок 210 обработки функционально соединен с рентгеновским аппаратом 220, например, через сетевые разъемы 216.
Блок 210 обработки рентгеновской системы 200 содержит процессор 211 и запоминающее устройство 213. Процессор 211 функционально соединен с запоминающим устройством 213. В соответствии с одним вариантом осуществления они соединены через шину 212. Процессор 211 может представлять собой любое устройство, способное исполнять программные команды, например, один или несколько микропроцессоров. Кроме того, процессор 211 может быть воплощен в компьютере общего назначения.
Запоминающее устройство 213 может представлять собой любое энергозависимое или энергонезависимое запоминающее устройство, подходящее для хранения данных и программных команд, например съемный диск, накопитель на жестком диске, компакт-диск (CD), оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM) и т.п. Кроме того, запоминающее устройство 213 может содержать одно или несколько запоминающих устройств.
Блок 210 обработки может дополнительно содержать один или несколько сетевых разъемов 216 для отправки или приема рентгеновских и других данных. Сетевые разъемы 216 могут представлять собой разъемы универсальной последовательной шины (USB), интернет-адаптеры или любой другой соединительный элемент, подходящий для приема данных от другого устройства либо непосредственно, либо через сеть, такую как интранет или Интернет.
Блок 210 обработки также может содержать дисплей 214, такой как монитор, для отображения рентгеновских изображений, анатомических моделей и т.п. Могут быть обеспечены один или несколько мониторов либо в дополнение к специализированным мониторами для системы 100 электромагнитного отслеживания и для рентгеновской системы 200, либо вместо них.
Дополнительные устройства ввода и/или вывода (I/O), такие как клавиатура, мышь и т.п., могут быть обеспечены как часть пользовательского интерфейса для приема указаний от пользователя, таких как выбор точки и навигация в пределах изображения на дисплее 214.
Запоминающее устройство 213 имеет закодированную на нем программу команд 219 рентгеновской системы, исполнимых посредством процессора 211, для удаления артефактов от генератора электромагнитного поля из трехмерного снимка. В соответствии с одним вариантом осуществления рентгеновские изображения представляют собой изображения, полученные посредством вращательного сканирования, например посредством компьютерной томографии (CT) с коническим лучом.
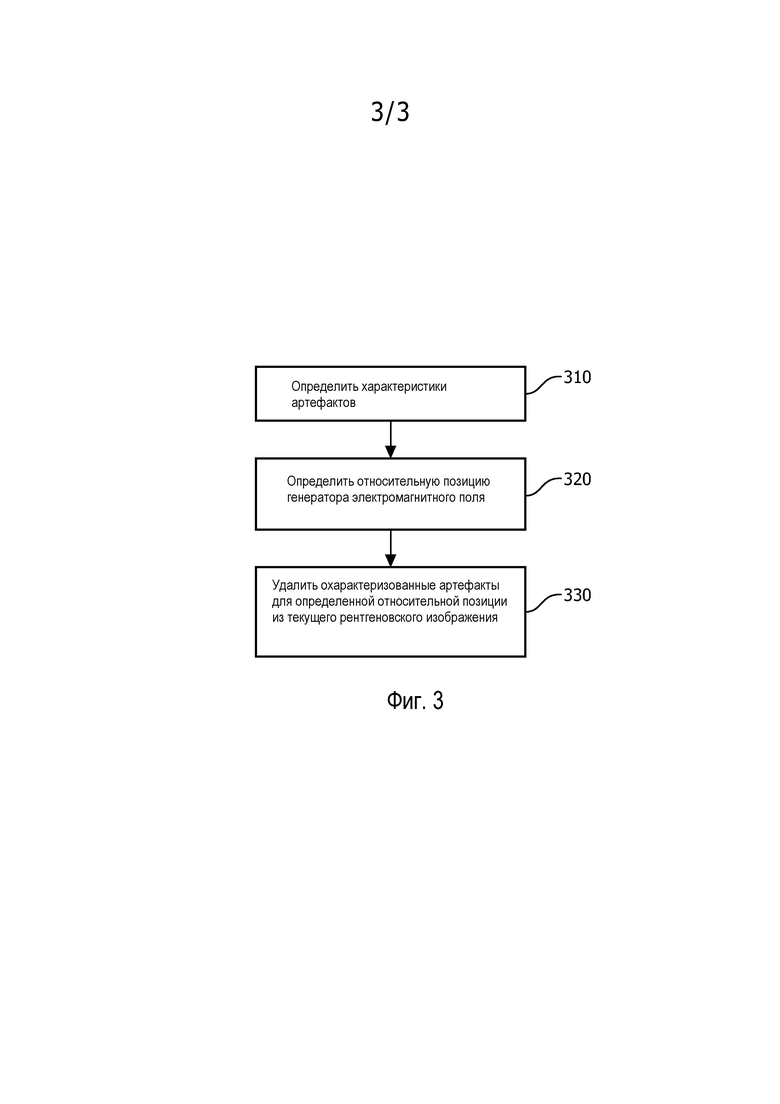
Фиг. 3 является блок-схемой последовательности операций способа удаления артефактов от генератора электромагнитного поля из трехмерного снимка в соответствии с вариантом осуществления настоящего изобретения. Перед операцией программа команд 219 рентгеновской системы, исполняемых процессором 211 рентгеновской системы, определяет характеристики артефактов от генератора электромагнитного поля по диапазону угловых позиций источника и детектора рентгеновского излучения (этап 310). Определение характеристик может содержать запись значений интенсивности или коэффициенты затухания для каждого воксела рентгеновского изображения в каждой угловой позиции рентгеновского аппарата 220. Коэффициенты затухания сохраняются вместе с их соответствующими местоположениями для каждой угловой позиции рентгеновского аппарата 220 относительно генератора 120 поля.
Рентгеновский аппарат установлен в известной угловой позиции без пациента на столе 10. Затем формируется рентгеновское изображение, и для каждого воксела коэффициенты затухания или значения интенсивности определяются и сохраняются в запоминающем устройстве 213 или другом запоминающем устройстве.
Во время операции программа команд 219 рентгеновской системы, исполняемых процессором 211 рентгеновской системы, определяет позицию генератора 120 электромагнитного поля относительно источника и детектора рентгеновского аппарата 220 (этап 320). Поскольку местоположение источника и детектора относительно стола 10 обычно известно, и генератор 120 поля находится в известной позиции относительно стола 10, для этого требуется простое преобразование, известное в области техники.
Затем программа команд 219 рентгеновской системы, исполняемых процессором 211 рентгеновской системы, удаляет охарактеризованные перед операцией артефакты для определенной относительной позиции генератора 120 электромагнитного поля из текущего рентгеновского изображения (этап 330). Для удаления артефактов сохраненные значения интенсивности для каждого воксела вычитаются из соответствующего воксела в текущем рентгеновском изображении.
Программа команд 219 рентгеновской системы, исполняемых процессор 211 рентгеновской системы, представляет полученное в результате текущее рентгеновское изображение на дисплее с удаленными артефактами. В соответствии с одним вариантом осуществления программа команды 219 рентгеновской системы, исполняемых процессором 211 рентгеновской системы, использует процесс обнаружения границ для определения местоположения артефактов и их формы. Тогда определяются и сохраняются только коэффициенты затухания для вокселов артефактов.
Изобретение может принять вид полностью аппаратного варианта осуществления или варианта осуществления, содержащего и аппаратные, и программные элементы. В иллюстративном варианте осуществления изобретение реализовано в программном обеспечении, которое включает в себя, но без ограничения, программируемое оборудование, резидентное программное обеспечение, микрокод и т.д.
Кроме того, изобретение может принять вид компьютерного программного продукта, доступного из применимого компьютером или машиночитаемого носителя, обеспечивающего программный код для использования с помощью компьютера или любой системы или устройства исполнения команд. В целях этого описания применимым компьютером или машиночитаемым носителем может являться любое устройство, которое может содержать или хранить программу для использования с помощью системы или устройства исполнения команд.
Упомянутый способ может быть реализован посредством программного продукта, содержащего машиночитаемый носитель, имеющий исполнимую машиной программу команд, которая при ее исполнении машиной, такой как компьютер, выполняет этапы способа. Этот программный продукт может быть сохранен на любом из множества известных машиночитаемых носителей, в том числе, но без ограничения, на компакт-дисках, гибких дисках, запоминающих устройствах USB и т.п.
Носитель может представлять собой электронную, магнитную, оптическую, электромагнитную, инфракрасную или полупроводниковую систему (или устройство). Примеры машиночитаемого носителя включают в себя полупроводниковое или твердотельное запоминающее устройство, магнитную ленту, извлекаемую компьютерную дискету, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), жесткий магнитный диск и оптический диск. Текущие примеры оптических дисков включают в себя компакт-диск, предназначенный только для чтения (CD-ROM), компакт-диск, предназначенный для чтения и записи (CD-R/W), и цифровой универсальный диск (DVD).
Предполагается, что предыдущее описание и сопроводительные чертежи являются иллюстративным и не ограничивают изобретение. Предполагается, что объем изобретения охватывает эквивалентные изменения и конфигурации в полном объеме следующей формулы изобретения.
Группа изобретений относится к медицинской технике, а именно к средствам формирования изображений, в частности, для удаления артефактов от генератора электромагнитного поля из трехмерного снимка. Способ содержит этапы, на которых перед операцией определяют характеристики артефактов от генератора электромагнитного поля по диапазону угловых позиций источника и детектора рентгеновского излучения, во время операции определяют позицию генератора электромагнитного поля относительно источника и детектора рентгеновского излучения; и удаляют охарактеризованные перед операцией артефакты для определенной относительной позиции генератора электромагнитного поля из текущего рентгеновского изображения. Система содержит процессор, запоминающее устройство и программу команд, закодированных в запоминающем устройстве и исполняемых процессором. В систему входит машиночитаемое устройство хранения, имеющее закодированную на нем, исполняемую компьютером программу команд. Использование изобретений позволяет снизить число артефактов при воссоздании изображения. 3 н. и 12 з.п. ф-лы, 3 ил. 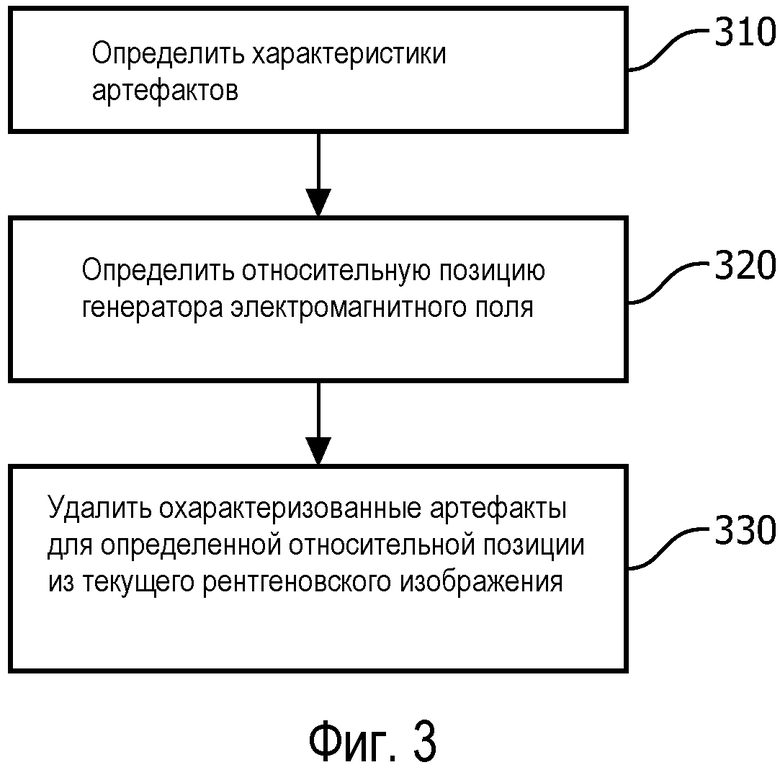
1. Способ удаления артефактов от генератора электромагнитного поля из трехмерного снимка, полученного посредством вращательного сканирования, содержащий этапы, на которых:
перед операцией определяют характеристики артефактов от генератора электромагнитного поля по диапазону угловых позиций источника и детектора рентгеновского излучения;
во время операции определяют позицию генератора электромагнитного поля относительно источника и детектора рентгеновского излучения; и
удаляют охарактеризованные перед операцией артефакты для определенной относительной позиции генератора электромагнитного поля из текущего рентгеновского изображения.
2. Способ по п. 1, в котором определение характеристик артефактов содержит этап, на котором определяют коэффициенты затухания для каждого воксела каждого артефакта в каждой угловой позиции, и в котором удаление охарактеризованных перед операцией артефактов содержит этап, на котором вычитают коэффициенты затухания из текущего рентгеновского изображения.
3. Способ по п. 2, дополнительно содержащий этап, на котором представляют текущее рентгеновское изображение на дисплее с удаленными артефактами.
4. Способ по п. 3, в котором определение характеристик артефактов дополнительно содержит этап, на котором определяют форму каждого артефакта.
5. Способ по п. 4, в котором форма каждого артефакта определяется посредством определения артефактов с использованием процесса обнаружения границ.
6. Система для удаления артефактов от генератора электромагнитного поля из трехмерного изображения, полученного посредством вращательного сканирования, содержащая:
процессор;
запоминающее устройство, функционально соединенное с процессором; и
программу команд, закодированных в запоминающем устройстве и исполняемых процессором для того, чтобы:
перед операцией определять характеристики артефактов от генератора электромагнитного поля по диапазону угловых позиций источника и детектора рентгеновского излучения;
во время операции определять позицию генератора электромагнитного поля относительно источника и детектора рентгеновского излучения; и
удалять охарактеризованные перед операцией артефакты для определенной относительной позиции генератора электромагнитного поля из текущего рентгеновского изображения.
7. Система по п. 6, в которой определение характеристик артефактов содержит определение коэффициентов затухания для каждого воксела каждого артефакта в каждой угловой позиции, и в которой удаление охарактеризованных перед операцией артефактов содержит вычитание коэффициентов затухания из текущего рентгеновского изображения.
8. Система по п. 7, дополнительно содержащая дисплей, функционально соединенный с процессором, причем программа команд при их исполнении процессором представляет текущее рентгеновское изображение на дисплее с удаленными артефактами.
9. Система по п. 8, в которой программа команд, исполняемых процессором, дополнительно определяет форму каждого артефакта.
10. Система по п. 9, в которой форма каждого артефакта определяется посредством определения артефактов с использованием процесса обнаружения границ.
11. Машиночитаемое устройство хранения для удаления артефактов от генератора электромагнитного поля из трехмерного снимка, полученного посредством вращательного сканирования, причем машиночитаемое устройство хранения имеет закодированную на нем исполняемую компьютером программу команд, содержащую:
программные команды для определения перед операцией характеристик артефактов от генератора электромагнитного поля по диапазону угловых позиций источника и детектора рентгеновского излучения;
программные команды определения во время операции позиции генератора электромагнитного поля относительно источника и детектора рентгеновского излучения; и
программные команды для удаления охарактеризованных перед операцией артефактов для определенной относительной позиции генератора электромагнитного поля из текущего рентгеновского изображения.
12. Машиночитаемое устройство хранения по п. 11, в котором программные команды для определения характеристик артефактов содержат программные команды для определения коэффициентов затухания для каждого воксела каждого артефакта в каждой угловой позиции, и в котором программные команды для удаления охарактеризованных перед операцией артефактов содержат программные команды для вычитания коэффициентов затухания из текущего рентгеновского изображения.
13. Машиночитаемое устройство хранения по п. 12, дополнительно содержащее программные команды для представления текущего рентгеновского изображения на дисплее с удаленными артефактами.
14. Машиночитаемое устройство хранения по п. 13, в котором программные команды для определения характеристик артефактов дополнительно содержат программные команды для определения формы каждого артефакта.
15. Машиночитаемое устройство хранения по п. 14, в котором программные команды для определения формы каждого артефакта определяют форму каждого артефакта посредством определения артефактов с использованием процесса обнаружения границ.
| US 2006237652 A1, 26.10.2006 | |||
| US 2011229007 A1, 22.09.2011 | |||
| Способ подготовки подложек ниобата лития для фильтров на поверхностно-акустических волнах | 1988 |
|
SU1627601A1 |
| US8023767 B1, 20.09.2011 | |||
| УСТРОЙСТВО И СПОСОБ ПРЕДСТАВЛЕНИЯ ТРЕХМЕРНОГО ОБЪЕКТА НА ОСНОВЕ ИЗОБРАЖЕНИЙ С ГЛУБИНОЙ | 2002 |
|
RU2237283C2 |

