Устройство углового сканирования относится к точной механике и может быть использовано для углового перемещения отражающего элемента.
Известно устройство углового сканирования, содержащее корпус, на котором закреплен пьезоэлектрический элемент посредством первого конца пьезоэлектрического элемента, при этом на втором конце пьезоэлектрического элемента закреплен передаточный блок, на котором установлен отражающий элемент (а.с. RU 1550457, 1990). Это устройство выбрано в качестве прототипа предложенного решения.
Недостаток этого устройства заключается в том, что пьезоэлектрический элемент может осуществлять сканирование только по одной координате, при этом передаточный блок не обеспечивает точного координатного положения отражающего элемента. Это снижает функциональные возможности устройства и его точность.
Технический результат изобретения заключается в повышении функциональных возможностей устройства и его точности.
Указанный технический результат достигается тем, что в устройстве углового сканирования, содержащем корпус, на котором закреплен пьезоэлектрический элемент посредством первого конца пьезоэлектрического элемента, при этом на втором конце пьезоэлектрического элемента закреплен передаточный блок, на котором установлен отражающий элемент, пьезоэлектрический элемент выполнен в виде пьезотрубки, а также тем, что передаточный блок выполнен в виде переходника, закрепленного первым концом на втором конце пьезоэлектрического элемента, при этом на втором конце установлен первый мембранный элемент, выполнен также в виде трех опор, закрепленных в корпусе и соединенных со вторым мембранным элементом, выполнен также в виде рычага, сопряженного с первым мембранным элементом и вторым мембранным элементом, на котором установлен отражающий элемент.
Существует вариант, в котором пьезоэлектрический элемент выполнен в виде однокоординатной X пьезотрубки.
Существует вариант, в котором в устройство введен модуль измерения перемещения по X координате.
Существует вариант, в котором пьезоэлектрический элемент выполнен в виде двухкоординатной XY пьезотрубки.
Существует вариант, в котором в устройство введен модуль измерения перемещения по X координате и модуль измерения перемещения по Y координате.
Существует вариант, в котором пьезоэлектрический элемент выполнен в виде трехкоординатной XYZ пьезотрубки.
Существует вариант, в котором в устройство введен модуль измерения перемещения по X координате, модуль измерения перемещения по Y координате и модуль измерения перемещения по Z координате.
Существует вариант, в котором жесткость первого мембранного элемента превышает жесткость второго мембранного элемента.
Существует вариант, в котором в устройство введен механизм, обеспечивающий замену отражающего элемента.
Существует вариант, в котором отражающий элемент выполнен в виде параболического зеркала.
Существует вариант, в котором основание содержит отверстия для вентиляции.
Существует вариант, в котором в устройство введен защитный элемент, сопряженный с рычагом и корпусом.
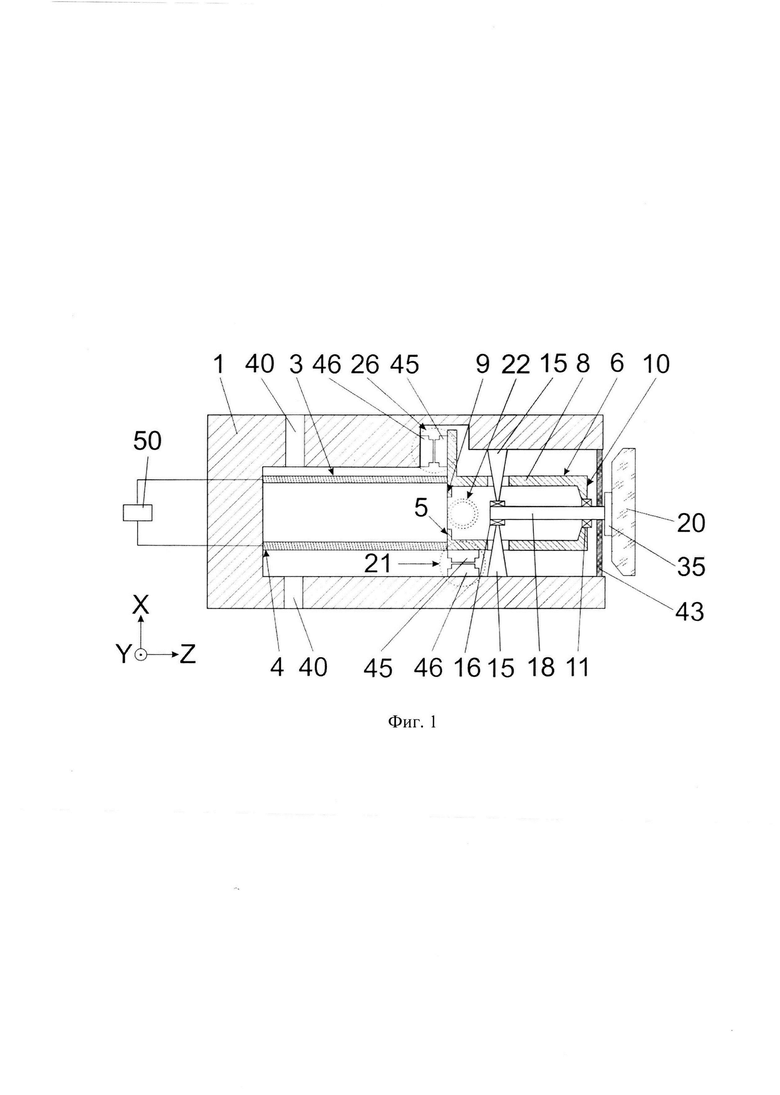
На фиг. 1 изображена схема устройства углового сканирования, вид сбоку.
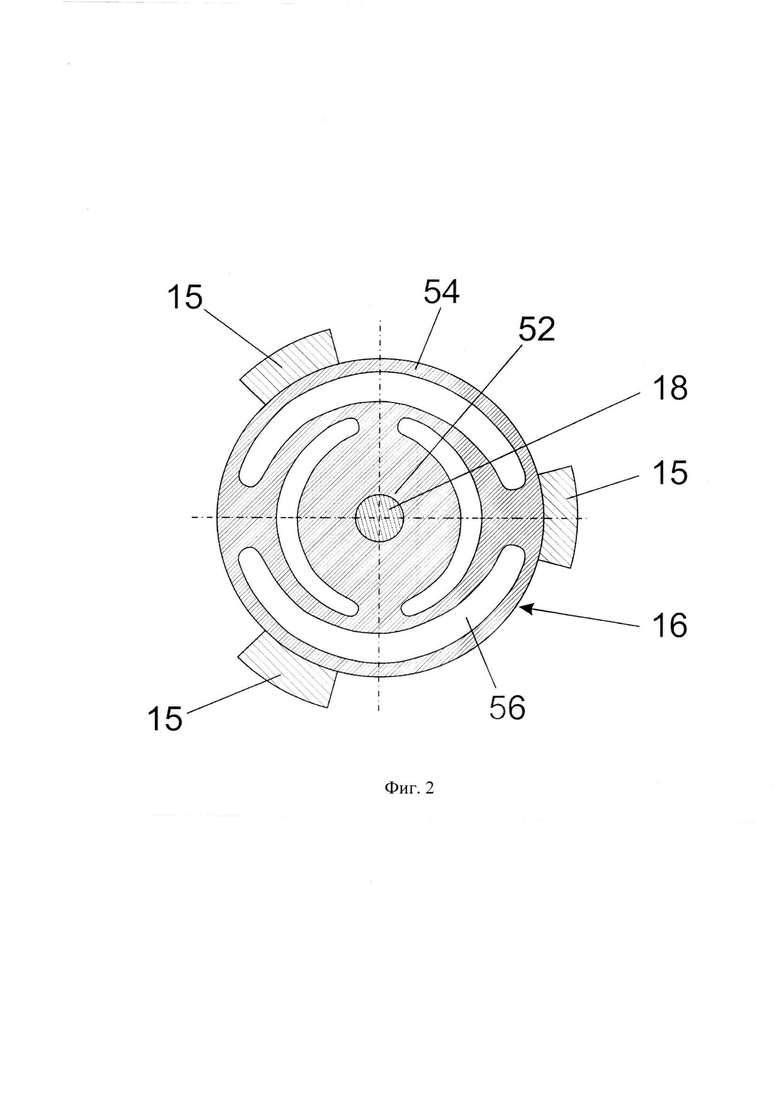
На фиг. 2 изображен вариант мембранного элемента.
Устройство углового сканирования содержит корпус 1, на котором закреплен пьезоэлектрический элемент 3 посредством своего первого конца 4. На втором конце 5 пьезоэлектрического элемента 3 закреплен передаточный блок 6. Пьезоэлектрический элемент 3 выполнен в виде пьезотрубки. Передаточный блок 6 выполнен в виде переходника 8, закрепленного первым концом 9 на втором конце 5 пьезоэлектрического элемента 3. На втором конце 10 передаточного блока 6 установлен первый мембранный элемент 11. Передаточный блок 6 выполнен также в виде трех опор 15, закрепленных в корпусе 1 и соединенных со вторым мембранным элементом 16. Передаточный блок 6 выполнен также в виде рычага 18, сопряженного с первым мембранным элементом 11 и вторым мембранным элементом 16, на котором установлен отражающий элемент 20.
В одном из вариантов пьезоэлектрический элемент 3 выполнен в виде однокоординатной X пьезотрубки.
В этом случае в устройство может быть введен модуль измерения перемещения по X координате 21.
В одном из вариантов пьезоэлектрический элемент 3 выполнен в виде двухкоординатной XY пьезотрубки.
В этом случае в устройство может быть введен модуль измерения перемещения по X координате 21 и модуль измерения перемещения по Y координате 22.
В одном из вариантов пьезоэлектрический элемент 3 выполнен в виде трехкоординатной XYZ пьезотрубки.
В этом случае в устройство может быть введен модуль измерения перемещения по X координате 21, модуль измерения перемещения по Y координате 22 и модуль измерения перемещения по Z координате 26.
Существует вариант, в котором жесткость первого мембранного элемента 11 превышает жесткость второго мембранного элемента 13.
В одном из вариантов в устройство введен механизм 35, обеспечивающий замену отражающего элемента 20. Механизм 35 может быть выполнен в виде платформы с винтом, который вворачивается в рычаг 8, тем самым обеспечивая съем и установку отражающего элемента 20.
В одном из вариантов отражающий элемент 20 выполнен в виде параболического зеркала.
В одном из вариантов основание 1 содержит отверстия для вентиляции 40.
Существует вариант, в котором в устройство введен защитный элемент 43, сопряженный с рычагом 18 и корпусом 1. Элемент 43 может быть выполнен из витона.
Модуль измерения перемещения по X координате 21, модуль измерения перемещения по Y координате 22 и модуль измерения перемещения по Z координате 26 могут быть выполнены из однотипных первого электрода 45 и второго электрода 46. При этом модули перемещения будут представлять собой емкостные датчики. Первые электроды 45 могут быть установлены на переходнике 8, а вторые электроды 46 на корпусе 1.
Пьезоэлектрический элемент 3 подключен к блоку управления 50. Модуль измерения перемещения по X координате 21, модуль измерения перемещения по Y координате 22 и модуль измерения перемещения по Z координате 26 могут быть также подключены к блоку управления 50.
Первый мембранный элемент 11 и второй мембранный элемент 16 могут быть выполнены в виде однотипных перфорированных плоских мембран. На фиг. 2 изображен второй мембранный элемент 16, закрепленный внутренней частью 52 на рычаге 18, а внешней частью 54 на трех опорах 15. Это закрепление может быть осуществлено по плотным посадкам с использованием переходных элементов (не показаны). Первый мембранный элемент 11 и второй мембранный элемент 16 могут содержать сквозные пазы 56 и быть выполнены из бериллиевой бронзы. При этом их различная жесткость может быть обеспечена за счет различной толщины. Например, первый мембранный элемент 11 может иметь толщину 0.3 мм, а второй мембранный элемент - 0.2 мм.
Устройство работает следующим образом.
На пьезоэлектрический элемент 3 подают переменное напряжение от блока управления 50. Пьезоэлектрический элемент 3 при этом осуществляет перемещение по координате X, и (или) по координате Y, и (или) по координате Z. В результате этого отражающий элемент 20 качается в плоскостях XZ, YZ и перемещается по координате Z. Модуль измерения перемещения по X координате 21, модуль измерения перемещения по Y координате 22 и модуль измерения перемещения по Z координате 26 контролируют величины перемещений.
То, что в устройстве углового сканирования пьезоэлектрический элемент 3 выполнен в виде пьезотрубки, а также тем, что передаточный блок 6 выполнен в виде переходника 8, закрепленного первым концом 9 на втором конце 5 пьезоэлектрического элемента 3, при этом на втором конце 10 установлен первый мембранный элемент 11, выполнен также в виде трех опор 15, закрепленных в корпусе 1 и соединенных со вторым мембранным элементом 16, выполнен также в виде рычага 18, сопряженного с первым мембранным элементом 11 и вторым мембранным элементом 16, на котором установлен отражающий элемент 20, приводит к повышению функциональных возможностей устройства и его точности.
То, что пьезоэлектрический элемент 3 выполнен в виде однокоординатной X пьезотрубки, приводит к повышению функциональных возможностей устройства и его точности.
То, что в устройство введен модуль измерения перемещения по X координате 21, приводит к повышению функциональных возможностей устройства и его точности.
То, что пьезоэлектрический элемент 3 выполнен в виде двухкоординатной XY пьезотрубки, приводит к повышению функциональных возможностей устройства и его точности.
То, что в устройство введен модуль измерения перемещения по X координате 21 и модуль измерения перемещения по Y координате 22, пьезоэлектрический элемент 3 выполнен в виде трехкоординатной XYZ пьезотрубки, приводит к повышению функциональных возможностей устройства и его точности.
То, что в устройство введен модуль измерения перемещения по X координате 21, модуль измерения перемещения по Y координате 22 и модуль измерения перемещения по Z координате 26, упрощает эксплуатацию устройства.
То, что жесткость первого мембранного элемента 11 превышает жесткость второго мембранного элемента 13, приводит к повышению функциональных возможностей устройства и его точности.
То, что в него введен механизм 35, обеспечивающий замену отражающего элемента 20, приводит к повышению функциональных возможностей.
То, что отражающий элемент 20 выполнен в виде параболического зеркала, приводит к повышению функциональных возможностей устройства.
То, что основание 1 содержит отверстия для вентиляции 40, увеличивает ресурс работы устройства.
То, что в устройство введен защитный элемент 43, сопряженный с рычагом 18 и корпусом 1, увеличивает ресурс работы устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЗИЦИОНЕР ТРЕХКООРДИНАТНЫЙ | 2005 |
|
RU2297078C1 |
| УСТРОЙСТВО ПОДВИЖКИ ОБРАЗЦА | 2005 |
|
RU2377620C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2005 |
|
RU2282257C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ ОПТИЧЕСКОЙ СПЕКТРОМЕТРИИ | 2015 |
|
RU2616854C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МОДУЛЬ ЗАПОМИНАЮЩЕГО УСТРОЙСТВА СВЕРХВЫСОКОЙ (ТЕРАБИТНОЙ) ЕМКОСТИ | 2002 |
|
RU2242054C2 |
| СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП | 2011 |
|
RU2465676C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2006 |
|
RU2366008C2 |
| МНОГОЗОНДОВЫЙ МОДУЛЬ ДЛЯ СКАНИРУЮЩЕГО МИКРОСКОПА | 2006 |
|
RU2306524C1 |
| ПЬЕЗОСКАНЕР МНОГОФУНКЦИОНАЛЬНЫЙ И СПОСОБ СКАНИРОВАНИЯ В ЗОНДОВОЙ МИКРОСКОПИИ | 2003 |
|
RU2248628C1 |
| СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП | 2005 |
|
RU2296387C1 |
Изобретение относится к точной механике и может быть использовано для углового перемещения отражающего элемента. Сущность изобретения заключается в том, что устройство углового сканирования содержит корпус 1, на котором закреплен пьезоэлектрический элемент 3 посредством первого конца 4 пьезоэлектрического элемента 3, на втором конце 5 пьезоэлектрического элемента 3 закреплен передаточный блок 6, на котором установлен отражающий элемент 20. Пьезоэлектрический элемент 3 выполнен в виде пьезотрубки. Передаточный блок 6 также включает переходник 8, закрепленный первым концом 9 на втором конце 5 пьезоэлектрического элемента 3, при этом на втором конце 10 переходника установлен первый мембранный элемент 11, три опоры 15, закрепленные в корпусе 1 и соединенные со вторым мембранным элементом 16, и рычаг 18, сопряженный с первым мембранным элементом 11 и вторым мембранным элементом 16, на котором установлен отражающий элемент 20. Технический результат изобретения заключается в повышении функциональных возможностей устройства и его точности. 11 з.п. ф-лы, 2 ил.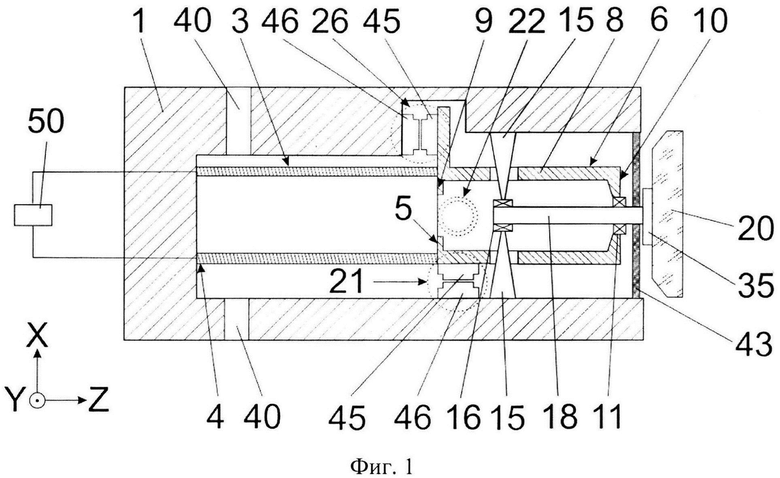
1. Устройство углового сканирования, содержащее корпус (1), на котором закреплен пьезоэлектрический элемент (3) посредством первого конца (4) пьезоэлектрического элемента (3), при этом на втором конце (5) пьезоэлектрического элемента (3) закреплен передаточный блок (6), на котором установлен отражающий элемент (20), отличающееся тем, что пьезоэлектрический элемент (3) выполнен в виде пьезотрубки, а также тем, что передаточный блок (6) выполнен в виде переходника (8), закрепленного первым концом (9) на втором конце (5) пьезоэлектрического элемента (3), при этом на втором конце (10) установлен первый мембранный элемент (11), выполнен также в виде трех опор (15), закрепленных в корпусе (1) и соединенных со вторым мембранным элементом (16), выполнен также в виде рычага (18), сопряженного с первым мембранным элементом (11) и вторым мембранным элементом (16), на котором установлен отражающий элемент (20).
2. Устройство по п. 1, отличающееся тем, что пьезоэлектрический элемент (3) выполнен в виде однокоординатной X пьезотрубки.
3. Устройство по п. 2, отличающееся тем, что в устройство введен модуль измерения перемещения по X координате (21).
4. Устройство по п. 1, отличающееся тем, что пьезоэлектрический элемент (3) выполнен в виде двухкоординатной XY пьезотрубки.
5. Устройство по п. 4, отличающееся тем, что в устройство введен модуль измерения перемещения по X координате (21) и модуль измерения перемещения по Y координате (22).
6. Устройство по п. 1, отличающееся тем, что пьезоэлектрический элемент (3) выполнен в виде трехкоординатной XYZ пьезотрубки.
7. Устройство по п. 6, отличающееся тем, что в устройство введен модуль измерения перемещения по X координате (21), модуль измерения перемещения по Y координате (22) и модуль измерения перемещения по Z координате (26).
8. Устройство по п. 1, отличающееся тем, что жесткость первого мембранного элемента (11) превышает жесткость второго мембранного элемента (13).
9. Устройство по п. 1, отличающееся тем, что в него введен механизм (35), обеспечивающий замену отражающего элемента (20).
10. Устройство по п. 1, отличающееся тем, что отражающий элемент (20) выполнен в виде параболического зеркала.
11. Устройство по п. 1, отличающееся тем, что основание (1) содержит отверстия для вентиляции (40).
12. Устройство по п. 1, отличающееся тем, что в него введен защитный элемент (43), сопряженный с рычагом (18) и корпусом (1).
| JP 2011013592 A, 20.01.2011 | |||
| WO 2004003625 A1, 08.01.2004 | |||
| JP 2014153703 A, 25.08.2014. |

