Изобретение относится к индивидуальным средствам передвижения, специально предназначенным для людей с ограниченными возможностями в движении.
В связи с ростом внимания общественности к судьбе инвалидов возникает необходимость к расширению сфер их деятельности, в том числе в таких областях, как спорт и развлечения.
Одним из таких направлений является подводное плавание. Однако остается не освоенной сфера подводного плавания для инвалидов с поражением ног.
Имеется большое количество инвалидных колясок традиционной конструкции, позволяющих инвалиду передвигаться по суше как при помощи ручных, так и механических приводов.
(Источник: http://gradusnik.pro/tipy-invalidnyh-kolyasok.html).
Так, известна принятая авторами за прототип коляска инвалидная, включающая раму коляски, сиденье, спинку, подлокотники, два задних колеса с внешними обручами, два передних колеса, подножки (Источник: http://www.medinvalid.ru/index.php?categoryID=557).
Недостатком указанного устройства является ограниченность его возможностей, не позволяющая перемещать коляску под водой.
Задачей предлагаемого изобретения является создание инвалидной коляски, конструкция которой позволяла бы инвалиду перемещаться под водой, совершая при этом все необходимые движения (повороты, развороты, перевороты на 360 градусов, плавание вниз и вверх) при полной управляемости коляской.
Указанная задача решается тем, что самоходная подводная инвалидная коляска, включающая раму коляски, сиденье, спинку, подножки, передние колеса, задние колеса, обручи задних колес, содержит с двух сторон зеркально симметрично расположенные несущие рамы, закрепляемые на обручах задних колес при помощи быстросъемных крючков-фиксаторов, а также вертикальные направляющие, при этом на несущих рамах установлены крылья, выполненные из композитного материала и оснащенные вырезами для установки движителей, закрепляемых на вертикальных направляющих несущей рамы.
Изобретение поясняется чертежами, на которых представлено:
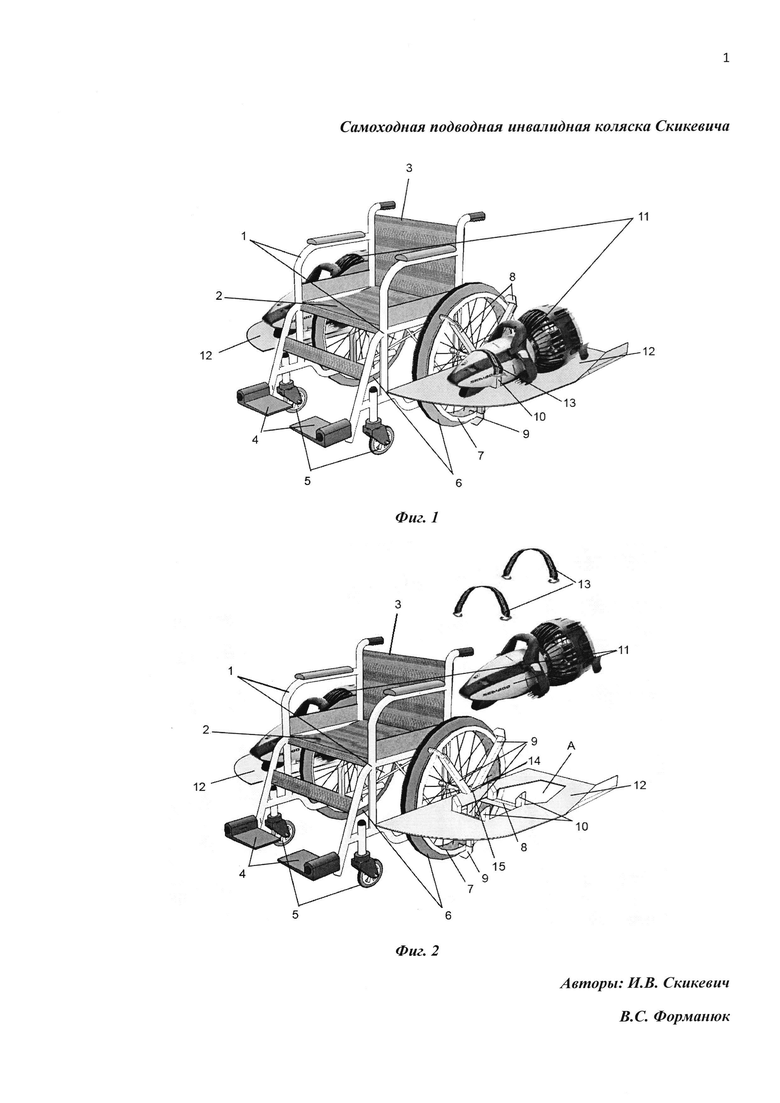
Фиг. 1 - Общий вид самоходной подводной инвалидной коляски.
Фиг. 2 - То же, что и на Фиг. 1, со снятым движителем.
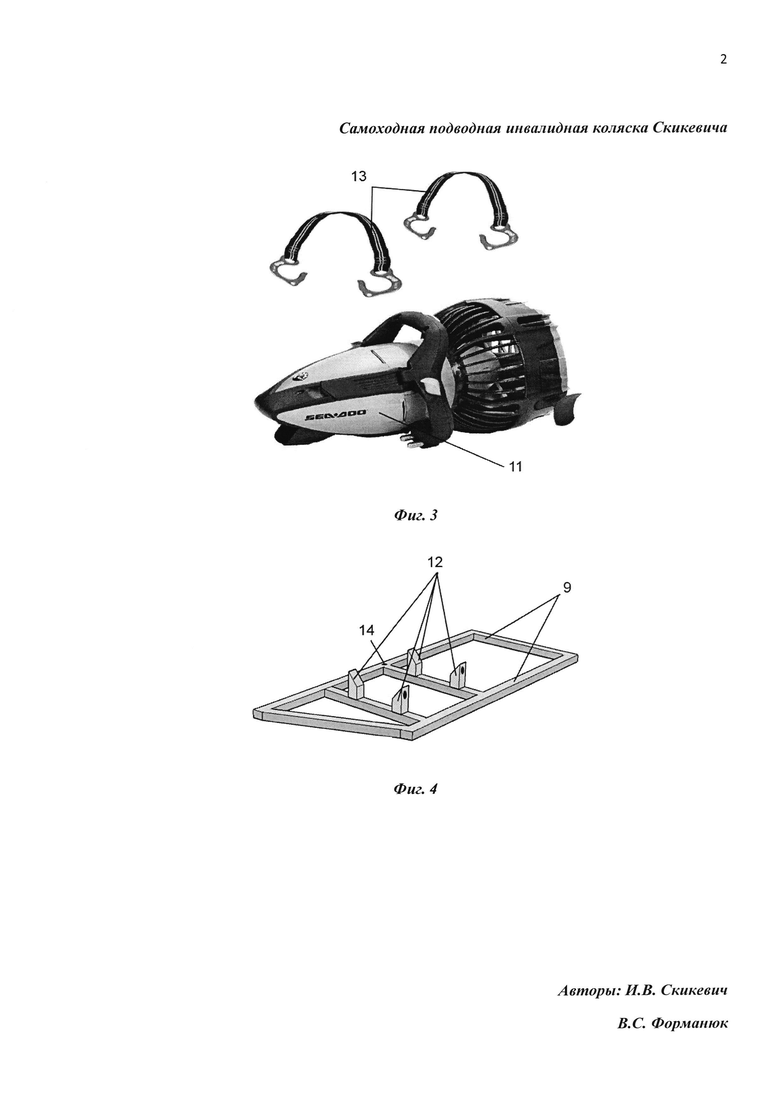
Фиг. 3 - Движитель с крепежными ремнями.
Фиг.4 - Несущие рамы движителей с посадочными гнездами и вертикальными направляющими.
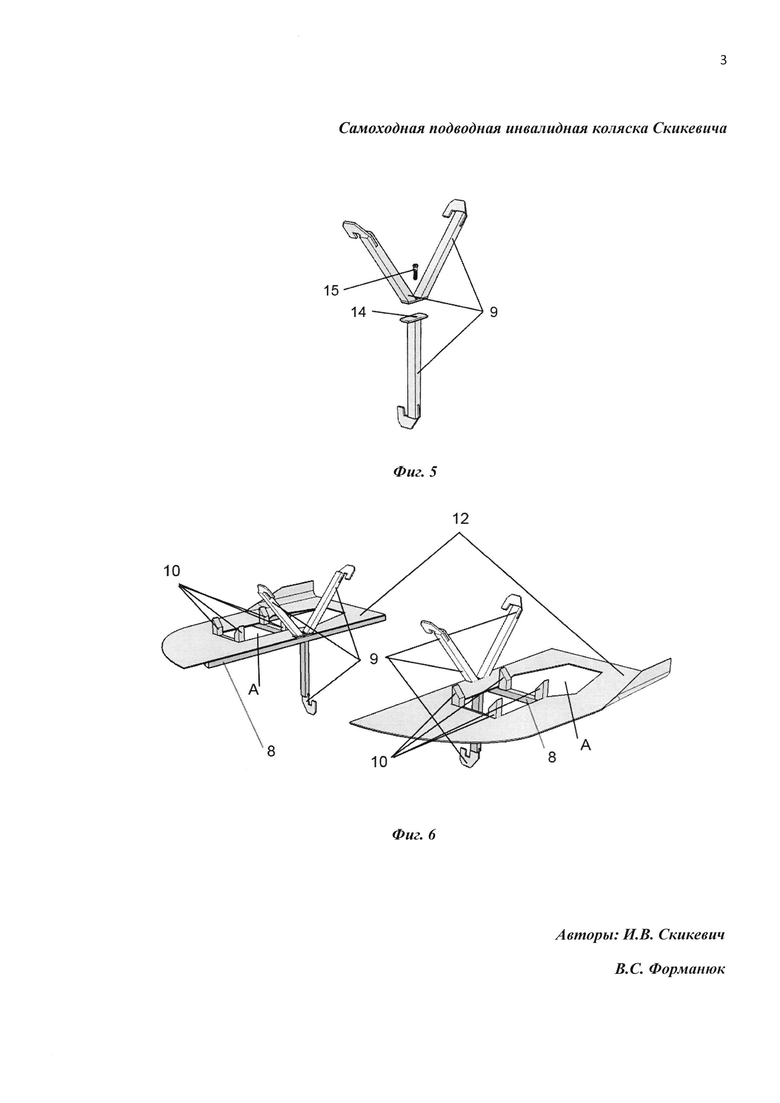
Фиг. 5 - Крючки-фиксаторы.
Фиг. 6 - Крылья в сборе с крючками-фиксаторами.
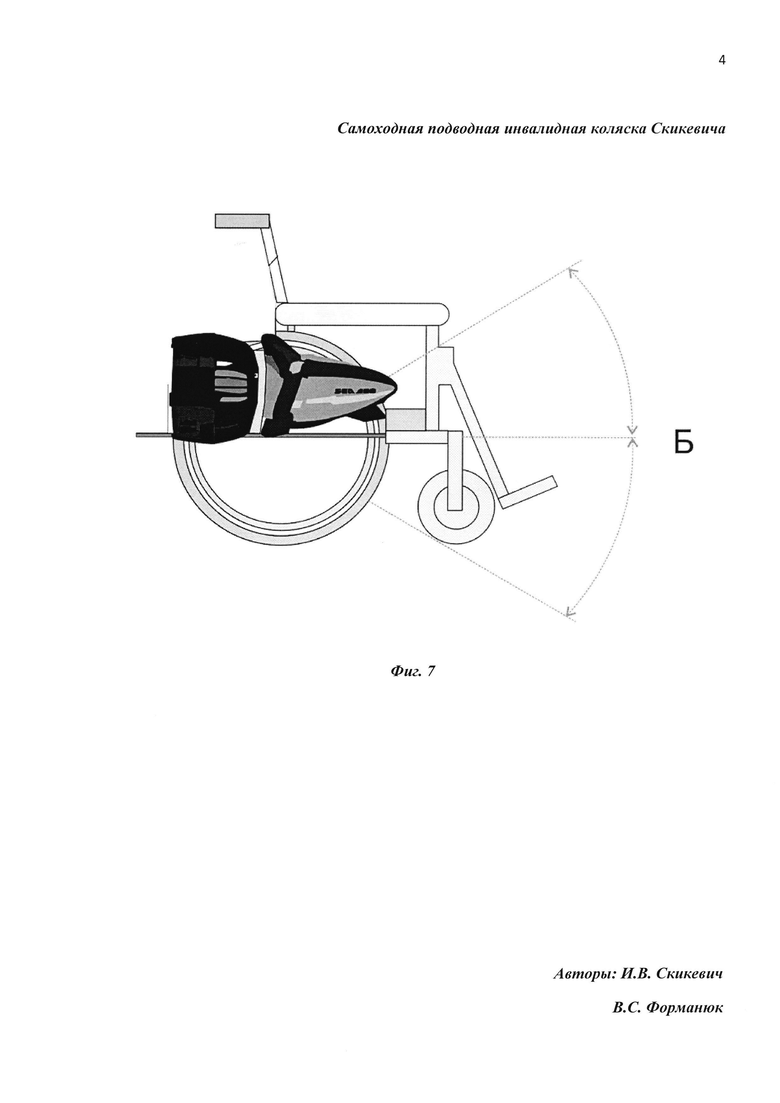
Фиг. 7 - Угол наклона несущей рамы с движителями относительно коляски.
Самоходная подводная инвалидная коляска изготовлена на базе стандартной (прогулочной, комнатной) инвалидной коляски с ручным управлением.
Самоходная подводная инвалидная коляска (Фиг. 1 и 2) включает в себя раму 1, сиденье 2, спинку 3, подножку 4, два передних колеса 5, два задних колеса 6, обручи задних колес 7. Для обеспечения возможности передвижения под водой коляска с двух сторон снабжена несущими рамами 8 с крючками-фиксаторами 9 и вертикальными направляющими 10, движителями 11.
На несущих рамах 8 установлены крылья 12, оснащенные вырезами А для установки движителей 11 (Фиг. 6). Движители 11 закреплены на несущих рамах 8 с помощью резиновых строп 13 к вертикальным направляющим 10.
Несущие рамы 8 и вертикальные направляющие 10 выполнены из легкосплавного, прочного нержавеющего металла методом аргонно-дуговой сварки. (Фиг. 4 и 5). Два крыла 12 выполнены из композитного материала, на которых закреплены движители 11.
В качестве движителей могут быть использованы подводные буксировщики, например, типа Sea Doo Seascooter GTI.
Вся конструкция может быть выполнена как неразборной, так и разборной, что позволяет уменьшить ее габариты при транспортировке.
Сборку самоходной подводной инвалидной коляски осуществляют следующим образом.
Крылья 12 устанавливают сверху на несущие рамы 8 и закрепляют саморезами по периметру. На обручи 7 задних колес 6 коляски зацепляют крючки-фиксаторы 9 по типу звездочки и одновременно между ними и в центре их соединения устанавливают несущую раму 8 в посадочные гнезда 14, стягивая крепежным болтом 15.
Сверху на крылья 12 в вырез А устанавливают движители 11, которые закрепляют крючками резиновых строп 13 (Фиг. 3) за вертикальные направляющие 10 несущих рам 8 (Фиг. 4).
Самоходную подводную инвалидную коляску используют следующим образом.
Перед спуском в воду, для обучения подводному плаванию (дайвингу), на пилота-инвалида надевают специальный гидрокостюм и маску. Пилота закрепляют специальным поясным ремнем к инвалидной коляске. Ноги его закрепляют специальным ремнем к подножкам 4. При погружении инвалид применяет загубник, вставляемый в рот, через который поступает кислород от акваланга, подвешенного ремешками за ручки спинки 3.
Пилот-инвалид держится за рукоятки движителей, на которых находится пусковой механизм движителей. Уже находясь в воде, пилот коляски в нужный момент включает пусковой механизм движителей, тем самым обеспечивая движение в водной среде. Чтобы плыть прямо, он включает одновременно два движителя 11.
Если нужно повернуть направо, то включает левый движитель, если налево, то - правый. В случае перемещения вверх или вниз пилот-инвалид включает попеременно или одновременно пусковой механизм движителей, при этом делая рычажные движения, направляя движители вверх или вниз (Фиг. 7) за счет прокручивания задних колес 6, на которых закреплены движители 11 (Фиг. 1, 2).
Задние колеса инвалидной коляски выполняют роль элементов управления.
Подводная коляска позволит инвалидам путешествовать под водой независимо от их ограниченных двигательных возможностей. Ею может управлять даже человек, не имеющий ног!
Самоходная подводная инвалидная коляска может быть использована для реабилитации инвалидов с нарушением функций опорно-двигательного аппарата, а также для водных занятий на поверхности воды, на мелководье.
Техническая характеристика в зависимости от модели буксировщиков (движителей):
1. Глубина погружения - до 50 м
2. Вес - 30-60 кг
3. Скорость - 4-7 км/ч
4. Время работы - 60-90 мин
5. Режимы - до 3-х скоростей
6. Габариты - 900×900×1000 (1500)см
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНВАЛИДНОЕ КРЕСЛО-КОЛЯСКА ДЛЯ ПОМЕЩЕНИЙ | 1991 |
|
RU2038064C1 |
| КРЕСЛО-КОЛЯСКА ДЛЯ ИНВАЛИДОВ (ВАРИАНТЫ) | 2011 |
|
RU2452451C1 |
| Портативная складная инвалидная коляска | 1991 |
|
SU1814547A3 |
| КРЕСЛО-КОЛЯСКА ДЛЯ ИНВАЛИДОВ И ПАНДУС ДЛЯ ПЕРЕМЕЩЕНИЯ КОЛЯСКИ ДЛЯ ИНВАЛИДОВ ПО ЛЕСТНИЧНЫМ МАРШАМ (ВАРИАНТЫ) | 2011 |
|
RU2478362C2 |
| КРЕСЛО-КОЛЯСКА | 1995 |
|
RU2104683C1 |
| ИНВАЛИДНАЯ ШАГАЮЩАЯ КРЕСЛО-КОЛЯСКА | 2010 |
|
RU2434622C1 |
| РЫЧАЖНАЯ ИНВАЛИДНАЯ КОЛЯСКА | 2015 |
|
RU2578800C1 |
| КРЕСЛО-КОЛЯСКА ДЛЯ ИНВАЛИДОВ | 1993 |
|
RU2088184C1 |
| Самоходное транспортное устройство для инвалидов | 1990 |
|
SU1792685A1 |
| ИНВАЛИДНАЯ КОЛЯСКА | 1995 |
|
RU2074832C1 |
Самоходная подводная инвалидная коляска, включающая раму коляски, сиденье, спинку, подножки, передние колеса, задние колеса, обручи задних колес, отличающаяся тем, что она содержит с двух сторон зеркально симметрично расположенные несущие рамы, закрепляемые на обручах задних колес при помощи быстросъемных крючков-фиксаторов, а также вертикальные направляющие, при этом на несущих рамах установлены крылья, выполненные из композитного материала и оснащенные вырезами для установки движителей, закрепляемых на вертикальных направляющих несущей рамы. Задачей предлагаемого изобретения является создание инвалидной коляски, конструкция которой позволяла бы инвалиду перемещаться под водой, совершая при этом все необходимые движения (повороты, развороты, перевороты на 360 градусов, плавание вниз и вверх) при полной управляемости коляской. 7 ил.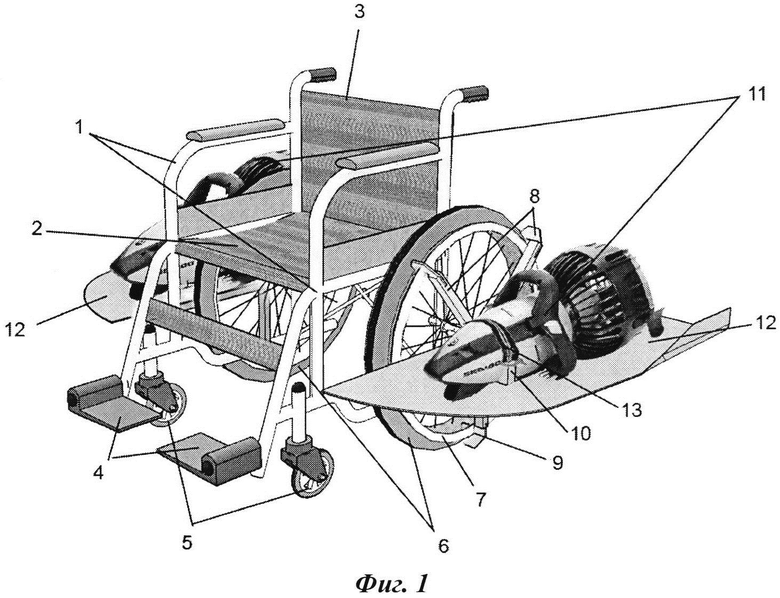
Самоходная подводная инвалидная коляска, включающая раму коляски, сиденье, спинку, подножки, передние колеса, задние колеса, обручи задних колес, отличающаяся тем, что она содержит с двух сторон зеркально симметрично расположенные несущие рамы, закрепляемые на обручах задних колес при помощи быстросъемных крючков-фиксаторов, а также вертикальные направляющие, при этом на несущих рамах установлены крылья, выполненные из композитного материала и оснащенные вырезами для установки движителей, закрепляемых на вертикальных направляющих несущей рамы.
| WO 2014058365 A1, 17.04.2014 | |||
| US 6467785 B2, 22.10.2002 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАИВЫГОДНЕЙШИХ УСЛОВИЙ РАБОТЫ НА МЕТАЛЛОРЕЖУЩИХ СТАНКАХ | 1930 |
|
SU30581A1 |
| WO 2013068710 A1, 16.05.2013. | |||

