Изобретение относится к области навигации летательных аппаратов (ЛА) с использованием искусственных спутников земли и может быть использовано при осуществлении посадки ЛА.
Известны способы посадки ЛА, позволяющие определять координаты ЛА при посадке с использованием спутниковой навигационной системы, в которых прием сигналов спутников осуществляется на земле локальной контрольно-корректирующей станцией (ЛККС) с известными координатами, вычисляющей дифференциальные поправки к определяемым на борту ЛА по сигналам спутников значениям псевдодальности и, соответственно, значениям координат ЛА [1, 2].
Общим недостатком всех указанных выше способов посадки является отсутствие на ЛККС и на борту ЛА средств выявления ситуации недопустимого снижения точности системы посадки. Причиной снижения точности работы системы может стать излучение сигналов сторонних радиотехнических систем вблизи антенны приемников ЛККС или борта (эффект радиоинтерференции этих сигналов и сигналов спутников). Учитывая высокую чувствительность приемника ЛККС, опасной может быть не только основная частота излучения сторонних систем, но и ее гармоники.
На необходимость контроля точности работы ЛККС указывается в ряде международных документов (например, [3]), однако в них не предлагается конкретного способа выявления ситуации недопустимого снижения точности работы ЛККС из-за эффектов радиоинтерференции. В этих документах также указывается на необходимость контроля целостности спутниковой системы посадки - достоверности (малой вероятности потери необходимой точности) определения координат ЛА. Для контроля целостности на борту ЛА необходимо иметь информацию о «показателе целостности и непрерывности ЛККС» (Ground Continuity and Integrity Designator [3, 11]), характеризующем качество работы ЛККС при наличии эффектов радиоинтерференции.
Известна работа [4], в которой предлагается использование двухчастотного приемника на ЛККС (в перспективе - трехчастотного приемника). При этом положительный эффект достигается за счет уменьшения вероятности одновременного поражения помехой двухчастотных каналов ЛККС. Недостатком такого способа является увеличение сложности и стоимости ЛККС (помимо двухчастотного приемника требуется двухчастотная антенна).
Известен также способ, заключающийся в использовании станции интегрального контроля (контрольного приемника) вблизи ЛККС [5]. В этом случае в месте расположения контрольного приемника осуществляется прием сигналов спутников и сигналов линии передачи данных (ЛПД), по которым оцениваются координаты контрольного приемника. Сопоставление ошибок оценивания координат контрольного приемника с заданным уровнем позволяет осуществить контроль точности работы ЛККС. Недостатком способа является невозможность оперативного автоматизированного контроля точности работы каналов измерения псевдодальностей на ЛККС и борту ЛА (с задержкой не более 3-х секунд). Кроме того, этот способ также приводит к увеличению сложности и стоимости ЛККС.
Содержащиеся в работе [6] предложения касаются анализа статистик (отношения сигнал/шум и погрешности (невязки) систем слежения за задержкой) в отдельных спутниковых каналах, при этом отсутствуют рекомендации относительно контроля точности работы ЛККС в целом.
Наиболее близким к заявляемому является способ посадки, защищенный патентом [2] и принятый за прототип заявляемого изобретения.
Способ посадки летательных аппаратов с использованием спутниковой навигационной системы по патенту [2] состоит в том, что определяют текущие координаты летательного аппарата по ориентации относительно нескольких спутников с известными координатами, для чего производят прием сигналов спутников с помощью бортового приемника, определяя псевдодальности, одновременно производят прием сигналов спутников на локальной контрольно-корректирующей станции с известным местоположением с помощью наземного приемника, вычисляют дифференциальные поправки псевдодальностей, транслируют их и координаты заданной глиссады на борт летательного аппарата через линию передачи данных, а на борту производят прием и обработку упомянутых дифференциальных поправок, на основе которых корректируют значения псевдодальностей и формируют отклонение текущих координат летательного аппарата от заданной глиссады, при этом на локальной контрольно-корректирующей станции предварительно формируют диаграмму объемного распределения прогнозируемой дисперсии наземной ошибки многолучевости, возникающей вследствие зеркального отражения сигналов спутников от рельефа и окружающих объектов, вводят упомянутую диаграмму в наземную базу данных, непрерывно по наземной базе данных определяют прогнозируемое значение дисперсии наземной ошибки многолучевости для каждого спутника в соответствии с его текущими относительными угловыми координатами, одновременно определяют дисперсию шумовой ошибки наземного приемника, вычисляют дисперсию наземной ошибки псевдодальности в виде суммы дисперсий наземной ошибки многолучевости и шумовой ошибки наземного приемника, непрерывно определяют мгновенное значение зеркальной компоненты наземной ошибки многолучевости, используя кодовые и фазовые измерения псевдодальности наземным приемником и измерение отношения сигнал/шум наземного приемника, на основе упомянутого мгновенного значения вычисляют текущее значение дисперсии наземной ошибки многолучевости, производят для каждого спутника сравнение текущего значения дисперсии наземной ошибки многолучевости с прогнозируемым значением данной дисперсии, содержащимся в наземной базе данных, выбирают максимальное из сравниваемых значений дисперсии, при этом по максимальному значению дисперсии наземной ошибки многолучевости и одновременно вычисляемому значению дисперсии шумовой ошибки наземного приемника вычисляют дисперсию наземной ошибки псевдодальности в виде суммы дисперсий наземной ошибки многолучевости и шумовой ошибки наземного приемника, вычисляют для каждого спутника среднеквадратическое значение наземной ошибки псевдодальности и транслируют его через линию передачи данных в общем пакете информации с дифференциальными поправками псевдодальностей и координатами заданной глиссады, одновременно корректируют упомянутую наземную диаграмму по непрерывно определяемому текущему значению дисперсии зеркальной компоненты наземной ошибки многолучевости для каждого спутника, а на борту предварительно формируют диаграмму объемного распределения прогнозируемой дисперсии бортовой ошибки многолучевости, возникающей вследствие зеркального отражения сигналов спутников от элементов конструкции корпуса данного типа летательного аппарата, вводят упомянутую диаграмму в бортовую базу данных, непрерывно по бортовой базе данных определяют дисперсию бортовой ошибки многолучевости с учетом угловой ориентации летательного аппарата относительно текущего положения каждого спутника, одновременно определяют дисперсию шумовой ошибки бортового приемника, далее определяют дисперсию бортовой ошибки псевдодальности в виде суммы дисперсий бортовой ошибки многолучевости и дисперсии шумовой ошибки бортового приемника, определяют дисперсию суммарной ошибки псевдодальности как сумму дисперсий наземной и бортовой ошибок псевдодальности для каждого спутника, а затем дисперсии суммарных ошибок псевдодальностей всех спутников используют для вычисления уточненных координат летательного аппарата и достоверности их определения.
Основным недостатком способа-прототипа является отсутствие действий, связанных с выявлением ситуации недопустимого снижения точности системы посадки из-за эффектов радиоинтерференции.
Кроме того, недостатком способа-прототипа является недостаточно высокая точность оценивания наземной ошибки многолучевости из-за неучета эффектов многолучевости с большим запаздыванием переотраженного радиосигнала и эффектов ионосферы.
Дополнительно, при оценивании дисперсии шумовой ошибки (на ЛККС и на борту ЛА) не учитывается диффузионная компонента ошибки многолучевости и влияние эффектов многолучевости на измерения отношения сигнал/шум.
Задачей заявляемого способа посадки ЛА с использованием спутниковой навигационной системы является повышение достоверности определения координат ЛА благодаря использованию дополнительных действий, связанных с выявлением ситуации недопустимого снижения точности работы ЛККС из-за эффектов радиоинтерференции и передачи информации о такой ситуации на борт ЛА с последующим ее анализом, а также более точному оцениванию текущего значения дисперсии наземной ошибки многолучевости (НОМ) и дисперсии шумовой ошибки (на ЛККС и на борту ЛА).
Поставленная задача решается следующим образом.
Предлагается способ посадки ЛА с использованием спутниковой навигационной системы, состоящий в том, что определяют текущие координаты ЛА по ориентации относительно нескольких спутников с известными координатами, для чего производят прием сигналов спутников с помощью бортового приемника, измеряя бортовые псевдодальности и отношения сигнал/шум, одновременно производят прием сигналов спутников на ЛККС с известным местоположением с помощью наземного приемника, измеряя наземные псевдодальности и отношения сигнал/шум, вычисляют для каждого спутника дифференциальные поправки псевдодальностей, одновременно на ЛККС формируют для каждого спутника оценки дисперсии наземной ошибки многолучевости (НОМ), по значениям которых и одновременно вычисляемым для каждого спутника значениям дисперсии шумовой ошибки наземного приемника вычисляют значения дисперсии наземной ошибки псевдодальности в виде суммы оценки значений дисперсии НОМ и дисперсии шумовой ошибки наземного приемника, определяют среднеквадратические значения наземной ошибки псевдодальности для каждого спутника, транслируют координаты заданной глиссады, упомянутые дифференциальные поправки псевдодальностей и среднеквадратические значения наземной ошибки псевдодальности для каждого спутника через ЛПД на борт ЛА в общем пакете информации, а на борту производят прием в общем пакете информации упомянутых дифференциальных поправок псевдодальностей, среднеквадратических значений наземной ошибки псевдодальности и координат заданной глиссады, с помощью дифференциальных поправок псевдодальностей корректируют значения бортовых псевдодальностей, с помощью среднеквадратических значений наземной ошибки псевдодальности вычисляют значения дисперсии наземной ошибки псевдодальности для каждого спутника, одновременно формируют для каждого спутника оценки дисперсии бортовой ошибки многолучевости (БОМ) и вычисляют значения дисперсии шумовой ошибки бортового приемника, далее вычисляют значения дисперсии бортовой суммарной ошибки псевдодальности как сумму оценки значений дисперсии БОМ, дисперсии шумовой ошибки бортового приемника и дисперсии наземной ошибки псевдодальности, и далее, используя откорректированные с помощью дифференциальных поправок значения бортовых псевдодальностей и дисперсии бортовой суммарной ошибки псевдодальности, вычисляют текущие уточненные координаты летательного аппарата, оценивают достоверность их вычисления и формируют отклонения уточненных координат от заданной глиссады, при этом для оценки уровня помех приемника введена величина интегрального отношения сигнал/шум, определяемая как усредненное значение отношений сигнал/шум для всех используемых спутников, причем на ЛККС дополнительно формируют диаграмму временного распределения прогнозируемого наземного интегрального отношения сигнал/шум (НИОС) путем усреднения наземных отношений сигнал/шум для каждого спутника в условиях нормальной помеховой обстановки, вводят упомянутую диаграмму в наземную базу данных, непрерывно по наземной базе данных определяют прогнозируемое значение НИОС в соответствии с текущим временем и используемой группой спутников, непрерывно сравнивают значение оценки дисперсии НОМ для каждого спутника с заданным порогом и выявляют первую и вторую группы спутников, для которых значение оценки дисперсии НОМ оказывается, соответственно, ниже и выше заданного порога, при этом с помощью измерений наземных отношений сигнал/шум для первой группы спутников определяют текущее значение НИОС путем вычисления взвешенного среднего значения измерений наземных отношений сигнал/шум, причем весовые коэффициенты взвешенного среднего значения связывают с углом места этих спутников функциональной зависимостью, выбираемой так, чтобы устранить скачкообразное изменение текущего значения НИОС во времени, а измерения наземных отношений сигнал/шум для второй группы спутников не используются при определении текущего значения НИОС, непрерывно формируют показатель целостности и непрерывности ЛККС и транслируют его на борт ЛА в упомянутом общем пакете информации, при этом также непрерывно на ЛККС производят сравнение текущего и прогнозируемого значений НИОС и в случае превышения прогнозируемого значения на заданную пороговую величину значение упомянутого показателя целостности и непрерывности устанавливают в состояние тревоги, а в случае непревышения упомянутого прогнозируемого значения на заданную пороговую величину корректируют хранящееся в базе данных прогнозируемое значение НИОС с помощью его текущего значения, а на борту ЛА формируют диаграмму временного распределения прогнозируемого бортового интегрального отношения сигнал/шум (БИОС) путем усреднения бортовых отношений сигнал/шум для каждого спутника в условиях нормальной помеховой обстановки, вводят упомянутую диаграмму в бортовую базу данных, непрерывно по бортовой базе данных определяют прогнозируемое значение БИОС в соответствии с текущим временем и используемой группой спутников, непрерывно сравнивают значение оценки дисперсии БОМ для каждого спутника с заданным порогом и выявляют первую и вторую группы спутников, для которых значение оценки дисперсии БОМ оказывается, соответственно, ниже и выше заданного порога, при этом с помощью измерений бортовых отношений сигнал/шум для первой группы спутников определяют текущее значение БИОС путем вычисления взвешенного среднего значения измерений бортовых отношений сигнал/шум, причем весовые коэффициенты взвешенного среднего значения связывают с углом места этих спутников функциональной зависимостью, выбираемой так, чтобы устранить скачкообразное изменение текущего значения БИОС во времени, а измерения бортовых отношений сигнал/шум для второй группы спутников не используются при определении текущего значения БИОС, производят прием в общем пакете информации и анализ упомянутого показателя целостности и непрерывности и, если его значение находится в состоянии тревоги, запрещают коррекцию псевдодальностей с помощью дифференциальных поправок и формируют соответствующее предупреждение о снижении точности системы, одновременно производят сравнение текущего и прогнозируемого значений БИОС и в случае превышения прогнозируемого значения на заданную пороговую величину формируют сигнал тревоги, запрещающий использование спутниковой системы для целей посадки ЛА, а в случае непревышения упомянутого прогнозируемого значения на заданную пороговую величину корректируют хранящееся в базе данных прогнозируемое значение БИОС с помощью его текущего значения.
Предлагается также на ЛККС прием сигналов спутников выполнять, в общем случае, с помощью М наземных приемников, в каждом из которых производить формирование и сравнение текущего и прогнозируемого значений НИОС, причем состояние показателя целостности и непрерывности ЛККС устанавливать в состояние тревоги в случае, если для L из М наземных приемников произошло превышение прогнозируемого значения НИОС относительно его текущего значения на заданную пороговую величину.
Также предлагается на ЛККС при формировании для каждого спутника оценки дисперсии НОМ с использованием кодовых и фазовых измерений наземных псевдодальностей и отношений сигнал/шум предварительно формировать среднечастотную вариацию измерений наземных отношений сигнал/шум (НОС) и среднечастотную вариацию измерений наземных псевдодальностей (НП), вычислять произведение упомянутых вариаций и определять ковариацию измерений НОС и НП путем сглаживания этого произведения, определять сглаженное значение квадрата среднечастотной вариации измерений НОС, формировать первую оценку ошибки многолучевости путем умножения среднечастотной вариации измерений НОС на ковариацию и деления результата на сглаженное значение квадрата среднечастотной вариации измерений HOC, определять дисперсию НОМ путем возведения в квадрат оценки ошибки многолучевости, при этом дополнительно производить компенсацию скоростной динамической ошибки в среднечастотных вариациях измерений НОС и измерений НП, определять сглаженное значение квадрата среднечастотной вариации измерений НП, формировать дополнительную оценку ошибки многолучевости путем умножения среднечастотной вариации измерений НОС на сглаженный квадрат среднечастотной вариации измерений НП и деления результата на упомянутую ковариацию, сравнивать модуль ковариации с заданным порогом и перед определением оценки дисперсии наземной ошибки многолучевости производить формирование окончательной оценки ошибки многолучевости таким образом, что в случае превышения заданного порога формировать окончательную оценку ошибки многолучевости как среднее арифметическое двух упомянутых оценок ошибки многолучевости, а в случае непревышения заданного порога использовать в качестве окончательной оценки ошибки многолучевости среднечастотную вариацию измерений НП.
Предлагается также на ЛККС вычисление значений дисперсии шумовой ошибки наземного приемника производить в комплексе с определением дисперсии диффузионной компоненты наземной ошибки многолучевости, а на борту ЛА вычисление значений дисперсии шумовой ошибки бортового приемника производить в комплексе с определением дисперсии диффузионной компоненты бортовой ошибки многолучевости, при этом формировать на ЛККС и на борту ЛА выборочные дисперсии высокочастотной вариации измерений НП, пересчитывать упомянутые дисперсии в значения дисперсии шумовых ошибок с учетом сглаживающих свойств алгоритма совместной фильтрации кодовых и фазовых измерений псевдодальностей.
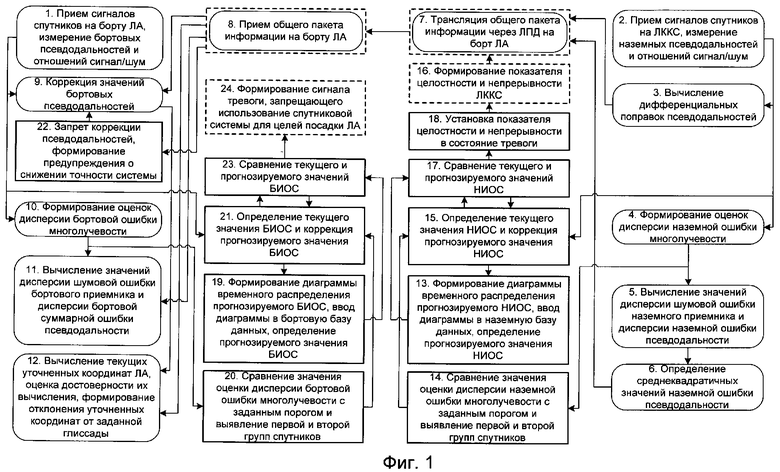
Суть заявляемого способа поясняется с помощью Фиг.1 и Фиг.2, на которых представлена последовательность операций при реализации способа посадки. Прямоугольникам с закругленными углами соответствуют операции прототипа, прямоугольникам из штриховых линий - дополнительные известные операции, прямоугольникам из сплошных линий соответствуют новые операции заявляемого способа.
На Фиг.3-6 представлены экспериментальные данные, иллюстрирующие заявляемый способ.
Способ, согласно Фиг.1, включает следующие операции, характерные для способа-прототипа: прием сигналов спутников на борту ЛА, измерение бортовых псевдодальностей и отношений сигнал/шум 1, прием сигналов спутников на ЛККС, измерение наземных псевдодальностей и отношений сигнал/шум 2, вычисление дифференциальных поправок псевдодальностей 3, формирование оценок дисперсии НОМ 4, вычисление значений дисперсии шумовой ошибки наземного приемника и дисперсии наземной ошибки псевдодальности 5, определение среднеквадратических значений наземной ошибки псевдодальности 6, трансляция общего пакета информации через ЛПД на борт ЛА 7. На борту ЛА производят прием общего пакета информации 8, коррекцию значений бортовых псевдодальностей 9, формирование оценок дисперсии БОМ 10, вычисление значений дисперсии шумовой ошибки бортового приемника и вычисление значений дисперсии бортовой суммарной ошибки псевдодальности 11, вычисление текущих уточненных координат ЛА, оценку достоверности их вычисления, формирование отклонения уточненных координат от заданной глиссады 12.
Предлагаются следующие дополнительные по отношению к способу-прототипу, в том числе новые, операции, реализующие заявленный способ.
На ЛККС выполняют формирование диаграммы временного распределения прогнозируемого НИОС, ввод диаграммы в наземную базу данных, определение прогнозируемого значения НИОС 13. Для формирования диаграммы временного распределения прогнозируемого НИОС используются выполненные в условиях нормальной помеховой обстановки предварительные измерения наземных отношений сигнал/шум, с помощью которых для всех N видимых в данный момент времени спутников вычисляют взвешенное среднее значение отношения сигнал/шум по формуле [12]:
 ,
,
где SNRi(tk) - наземное отношение сигнал/шум для i-го спутника в момент времени tk; αi(tk) - весовой коэффициент;  - наземное интегральное отношение сигнал/шум (НИОС), рассматриваемое далее как прогнозируемое значение НИОС.
- наземное интегральное отношение сигнал/шум (НИОС), рассматриваемое далее как прогнозируемое значение НИОС.
Использование весовых коэффициентов αi(tk) позволяет устранить скачки в зависимости  при смене рабочего созвездия спутников, когда меняется число слагаемых N в весовой сумме. Для этого применяется функциональная зависимость весового коэффициента i-го спутника от угла места EL(tk) этого спутника, обеспечивающая «мягкое» включение (или выключение) спутника в операцию вычисления НИОС. В качестве примера подобной функциональной зависимости можно привести следующую:
при смене рабочего созвездия спутников, когда меняется число слагаемых N в весовой сумме. Для этого применяется функциональная зависимость весового коэффициента i-го спутника от угла места EL(tk) этого спутника, обеспечивающая «мягкое» включение (или выключение) спутника в операцию вычисления НИОС. В качестве примера подобной функциональной зависимости можно привести следующую:

Результаты вычислений дополнительно усредняют, используя эффекты повторяемости углового положения спутников навигационной системы. Затем значения НИОС вводят в базу данных и в дальнейшем непрерывно по этой базе данных определяют прогнозируемое значение НИОС 13 в соответствии с текущим временем и используемой группой спутников (если некоторый спутник выводится из числа рабочих спутников и заменяется резервным, то в процессе вычисления НИОС используются параметры нового, бывшего резервным, спутника).
Значение оценки дисперсии НОМ сравнивают с заданным порогом и выявляют первую и вторую группы спутников 14. Для первой группы спутников значение оценки дисперсии НОМ оказывается ниже порога и, следовательно, сигналы первой группы спутников не подвержены эффектам многолучевости. Порог выбирается, исходя из величины среднеквадратического значения ошибки (шумовой компоненты) σHOM при оценке НОМ в наименее благоприятных (при малом значении EL(tk)) условиях работы спутникового канала (например, порог может быть установлен на уровне 3σHOM).
С помощью измерений наземного отношения сигнал/шум для первой группы спутников, сигналы которых не подвержены эффектам многолучевости, определяют текущее значение НИОС 15. Для этой цели используют текущие измерения наземного отношения сигнал/шум, с помощью которых вычисляют взвешенное среднее значение отношения сигнал/шум по формуле, приведенной ранее (отличием является лишь выбраковка спутниковых каналов, в которых оценка дисперсии НОМ превышает заданный порог; необходимость такой выбраковки объясняется наличием искажений в измерениях отношения сигнал/шум, не связанных с эффектами радиоинтерференции). Измерения наземного отношения сигнал/шум для второй группы спутников, сигналы которых подвержены эффектам многолучевости, при определении текущего значение НИОС не используются, а взвешенное среднее значение отношения сигнал/шум  рассматривается как текущее значение НИОС.
рассматривается как текущее значение НИОС.
Одновременно формируют показатель целостности и непрерывности ЛККС 16 (Ground Continuity and Integrity Designator [3, 11]) и транслируют его через ЛПД на борт ЛА в общем пакете информации 7. В нормальном режиме работы ЛККС этому показателю присваивают значение, равное единице [3].
Далее производят сравнение текущего и прогнозируемого значений НИОС 17 и в случае превышения прогнозируемого значения НИОС на заданную пороговую величину значение показателя целостности и непрерывности ЛККС устанавливают в состояние тревоги 18 (в этом случае это значение равно семи [11]). При наличии эффектов радиоинтерференции наземное отношение сигнал/шум уменьшается, что и позволяет оперативно контролировать точность работы ЛККС. Пороговая величина выбирается с учетом среднеквадратического значения шумовой компоненты σсш в измерениях наземного отношения сигнал/шум в наименее благоприятных (при малом значении EL(tk)) условиях работы спутникового канала. При формировании текущего значения НИОС шумовая компонента в результате усреднения уменьшается до значения  Пороговая величина выбирается таким образом, чтобы достичь компромисса в характеристиках целостности и непрерывности навигационных измерений (например, пороговая величина может быть установлена на уровне
Пороговая величина выбирается таким образом, чтобы достичь компромисса в характеристиках целостности и непрерывности навигационных измерений (например, пороговая величина может быть установлена на уровне  ).
).
В случае же непревышения прогнозируемого значения НИОС на заданную пороговую величину выполняется коррекция хранящегося в наземной базе данных прогнозируемого значения НИОС с помощью текущего значения НИОС 15. Необходимость такой коррекции объясняется изменениями в мощности излучаемого спутниками радиосигнала и условиями его распространения при перемене погоды и времен года. При коррекции используется известный алгоритм α-фильтра [2]:

где  - хранящееся в базе данных прежнее прогнозируемое значение НИОС;
- хранящееся в базе данных прежнее прогнозируемое значение НИОС;  - скорректированное прогнозируемое значение НИОС; α - весовой коэффициент, характеризующий желаемую скорость обновления наземной диаграммы зависимости НИОС от времени.
- скорректированное прогнозируемое значение НИОС; α - весовой коэффициент, характеризующий желаемую скорость обновления наземной диаграммы зависимости НИОС от времени.
На борту ЛА тем же способом что и на ЛККС, выполняют формирование диаграммы временного распределения прогнозируемого БИОС, ввод ее в бортовую базу данных, определение прогнозируемого значения БИОС 19.
Значение оценки дисперсии БОМ сравнивают с заданным порогом и выявляют первую и вторую группы спутников 20. Для первой группы спутников значение оценки дисперсии БОМ оказывается ниже порога и, следовательно, сигналы первой группы спутников не подвержены эффектам многолучевости. При выборе порога используются те же соображения, что и на ЛККС.
С помощью измерений бортового отношения сигнал/шум для первой группы спутников, сигналы которых не подвержены эффектам многолучевости, определяют текущее значение БИОС 21. Для этой цели используют текущие измерения бортового отношения сигнал/шум, с помощью которых вычисляют взвешенное среднее значение отношения сигнал/шум  по формуле, приведенной ранее. Измерения бортового отношения сигнал/шум для второй группы спутников, сигналы которых подвержены эффектам многолучевости, при определении текущего значение БИОС не используются, взвешенное среднее значение отношения сигнал/шум
по формуле, приведенной ранее. Измерения бортового отношения сигнал/шум для второй группы спутников, сигналы которых подвержены эффектам многолучевости, при определении текущего значение БИОС не используются, взвешенное среднее значение отношения сигнал/шум  рассматривается как текущее значение БИОС.
рассматривается как текущее значение БИОС.
Производят прием (в общем пакете информации 8) и анализ упомянутого показателя целостности и непрерывности ЛККС. Если работа ЛККС находится в номинальном режиме (состояние показателя равно единице), то принятые через ЛПД дифференциальные поправки ЛККС используются для коррекции измеряемых на борту ЛА псевдодальностей 9. Если на ЛККС выявлены эффекты радиоинтерференции (состояние показателя равно семи), то запрещают коррекцию псевдодальностей с помощью дифференциальных поправок (отключают дифференциальный режим) и формируют соответствующее предупреждение о снижении точности системы 22.
Кроме того, на борту ЛА производят сравнение текущего и прогнозируемого значений БИОС 23 и в случае превышения прогнозируемого значения БИОС на заданную пороговую величину формируют сигнал тревоги, запрещающий использование спутниковой системы для целей посадки ЛА 24. При выборе пороговой величины используются те же соображения, что и на ЛККС.
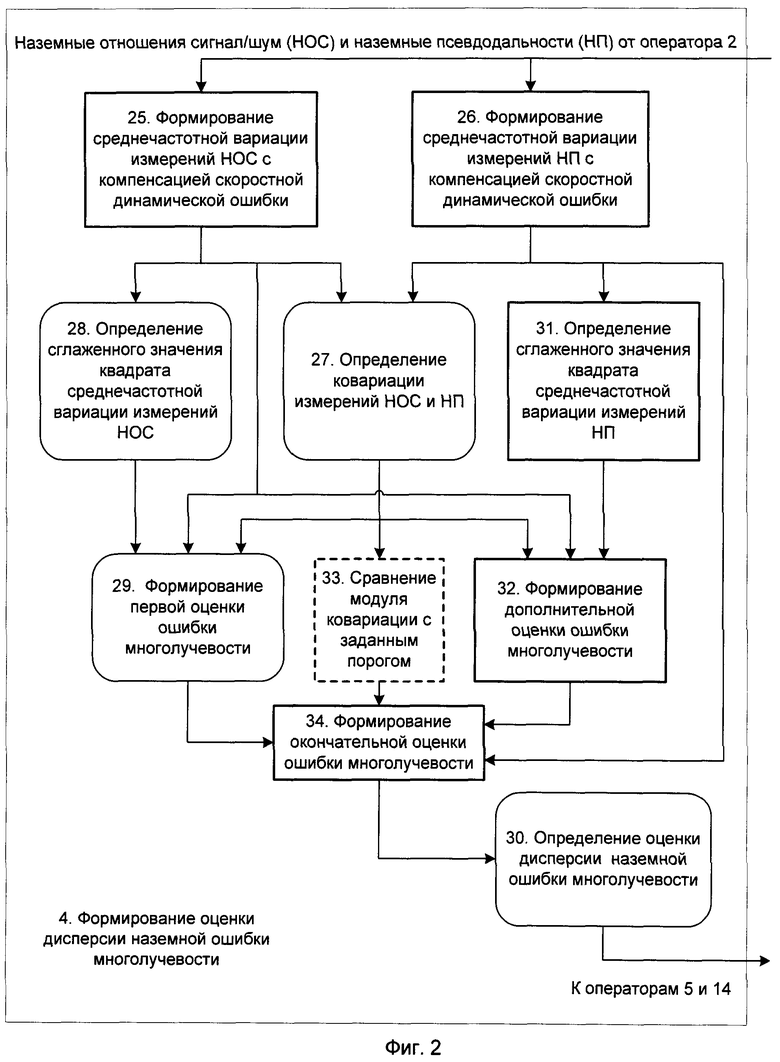
Суть предложений относительно способа формирования оценок дисперсии НОМ на ЛККС с использованием кодовых и фазовых измерений наземных псевдодальностей и отношений сигнал/шум поясняется с помощью Фиг.2.
Способ, согласно Фиг.2, включает следующие операции, характерные для способа-прототипа: формирование среднечастотной вариации измерений наземного отношения сигнал/шум (НОС) 25, формирование среднечастотной вариации измерений наземной псевдодальности (НП) 26, вычисление произведения упомянутых среднечастотных вариаций и определение ковариации измерений НОС и НП 27 путем сглаживания этого произведения, определение сглаженного значения квадрата среднечастотной вариации измерений НОС 28, формирование первой оценки ошибки многолучевости 29 путем умножения среднечастотной вариации измерений НОС на ковариацию и деления результата на сглаженное значение квадрата среднечастотной вариации измерений HOC [7], определение оценки дисперсии НОМ 30 путем возведения в квадрат оценки ошибки многолучевости.
Предлагаются следующие дополнительные, в том числе новые, операции, реализующие заявленный способ формирования оценок дисперсии НОМ.
Предлагается формирование среднечастотной вариации измерений НОС 25 и формирование среднечастотной вариации измерений НП 26 выполнять с компенсацией скоростной динамической ошибки. При этом измерения НОС фильтруют с помощью фильтра не ниже 2-го порядка астатизма. В качестве такого фильтра можно, например, использовать алгоритм αβ-фильтра [8]:
x1(k)=x1(k-1)+Δtx2(k-1)+α(k)Δ1(k),
x2(k)=x2(k-1)+β(k)Δ1(k),
Δ1(k)=z1(k)-[x1(k-1)+Δtx2(k-1)],
где x1(k), x2(k) - оценки фильтрованных измерений HOC и его скорости, соответственно; z1(k)=SNR(k) - измерения HOC; Δt - интервал временной дискретизации; k - текущее дискретное время;
 ,
, 
α(k)=2·10-3, β(k)=10-6 при k≥3000.
Выбор указанных значений коэффициентов сглаживания α(k) и β(k) обеспечивает отфильтровывание недоступной для оценивания данным способом спектральных составляющих ошибки многолучевости с интервалом корреляции более 500 секунд. Выбор переменных коэффициентов сглаживания уменьшает длительность переходного процесса алгоритма αβ-фильтра.
Кодовые и фазовые измерения НП фильтруют с помощью фильтра не ниже 2-го порядка астатизма, причем описанный ранее алгоритм αβ-фильтра следует видоизменить с использованием принципа инвариантности [9]:
y1(k)=y1(k-1)+δz3(k)+Δty2(k-1)+α(k)Δ2(k),
y2(k)=y2(k-1)+β(k)Δ2(k),
Δ2(k)=z2(k)-[y1(k-1)+δz3(k)+Δty2(k-1)],
где y1(k), y2(k) - оценки фильтрованной НП и ее скорости, соответственно; z2(k) - кодовые измерения НП; δz3(k)=z3(k)-z3(k-1) - приращение фазовых измерений НП.
В качестве выходных сигналов αβ-фильтров используются сигналы рассогласования фильтров (невязки) Δ1(k) и Δ2(k), причем сами αβ-фильтры выполняют функцию фильтров верхних частот. Оценки скоростей обеспечивают компенсацию скоростной динамической ошибки, обусловленной изменением среднего уровня НОС (в первом αβ-фильтре) и ионосферной задержки радиосигнала (во втором αβ-фильтре). В результате, невязки Δ1(k) и Δ2(k) не имеют смещений при формировании ошибки многолучевости с интервалом корреляции до 500 секунд.
Далее невязки Δ1(k) и Δ2(k) сглаживаются с помощью описанных в [2] алгоритмов α-фильтров с коэффициентами сглаживания 0,01, так что на выходе этих фильтров формируются среднечастотные вариации измерений HOC  с компенсацией скоростной динамической ошибки 25 и среднечастотные вариации измерений НП
с компенсацией скоростной динамической ошибки 25 и среднечастотные вариации измерений НП  с компенсацией скоростной динамической ошибки 26 с интервалом корреляции от 100 до 500 секунд.
с компенсацией скоростной динамической ошибки 26 с интервалом корреляции от 100 до 500 секунд.
При формировании оценки ошибки многолучевости с использованием измерений НОС следует учесть следующие соображения.
Связь ошибки многолучевости М со среднечастотными вариациями
 и
и  можно описать выражениями [7]:
можно описать выражениями [7]:
 ,
,
 ,
,
где β - нормирующий множитель; ν1 - ошибка измерения HOC; ν2 - ошибка кодовых измерений НП (включает в себя шумовую и ионосферную компоненты).
Специфической особенностью задачи формирования оценки ошибки многолучевости  является невозможность разделения эффектов ионосферы и многолучевости в измерениях НП одночастотного приемника. Именно поэтому оценку
является невозможность разделения эффектов ионосферы и многолучевости в измерениях НП одночастотного приемника. Именно поэтому оценку  формируют с использованием измерений HOC, но для этого необходимо найти нормирующий множитель β. Заметим, однако, что благодаря компенсации скоростной ошибки в αβ-фильтрах вклад эффектов ионосферы в ошибку ν2 оказывается малым, и статистику , в крайнем случае, также допустимо использовать в качестве решения нашей задачи.
формируют с использованием измерений HOC, но для этого необходимо найти нормирующий множитель β. Заметим, однако, что благодаря компенсации скоростной ошибки в αβ-фильтрах вклад эффектов ионосферы в ошибку ν2 оказывается малым, и статистику , в крайнем случае, также допустимо использовать в качестве решения нашей задачи.
Дополнительно определяют сглаженное значение квадрата среднечастотной вариации измерений НП 31 и формируют дополнительную оценку ошибки многолучевости 32 путем умножения среднечастотной вариации измерений НОС на сглаженный квадрат среднечастотной вариации измерений НП и деления результата на упомянутую ковариацию.
Выполнение указанных действий 27, 28 и 31 математически описывается следующими выражениями:
 ,
,
 ,
,
 ,
,
где Е{.} - оператор усреднения (операцию усреднения или сглаживания выполняет α-фильтр с коэффициентом сглаживания менее 0,001);  - ковариация измерений HOC и НП 27;
- ковариация измерений HOC и НП 27;  - сглаженное значение квадрата среднечастотной вариации измерений НОС 28;
- сглаженное значение квадрата среднечастотной вариации измерений НОС 28;  - сглаженное значение квадрата среднечастотной вариации измерений НП 31;
- сглаженное значение квадрата среднечастотной вариации измерений НП 31;  и
и  - дисперсии ошибок ν1 и ν2, соответственно; делается естественное предположение об отсутствии взаимной корреляции между всеми составляющими компонент и .
- дисперсии ошибок ν1 и ν2, соответственно; делается естественное предположение об отсутствии взаимной корреляции между всеми составляющими компонент и .
Далее формируют оценку нормирующего множителя

и оценку обратной величины от нормирующего множителя
 ,
,
где σ3 2 и σ4 2 - ошибки оценивания β и 1/β, соответственно.
Эти оценки используются для построения двух оценок ошибки многолучевости:
 (первая оценка ошибки многолучевости 29) и
(первая оценка ошибки многолучевости 29) и
 (дополнительная оценка ошибки многолучевости 32).
(дополнительная оценка ошибки многолучевости 32).
Из-за ошибок измерения НОС оценка  завышена, что приводит к недопустимому в системе посадки ЛА занижению оценки
завышена, что приводит к недопустимому в системе посадки ЛА занижению оценки  . С другой стороны, оценка
. С другой стороны, оценка  также завышена, но это приводит к завышению и оценки
также завышена, но это приводит к завышению и оценки  . Предлагается компромиссное решение: для формирования окончательной оценки ошибки многолучевости 34 использовать среднее арифметическое оценок
. Предлагается компромиссное решение: для формирования окончательной оценки ошибки многолучевости 34 использовать среднее арифметическое оценок  и
и  , т.е.
, т.е.
Построенная таким образом оценка среднечастотной компоненты ошибки зеркальной многолучевости базируется на предположении о линейной связи эффектов многолучевости в кодовых измерениях НП и измерениях НОС. Такое предположение справедливо при наличии одного сильного зеркального отражения и небольшом запаздывании переотраженного сигнала, приводящем к искажению вершины корреляционного пика кода псевдодальности. При действии нескольких отражений с разными задержками нельзя найти общий коэффициент β. В случае же эффектов многолучевости с большим запаздыванием переотраженного сигнала возможно искажение заднего ската корреляционного пика. Это вызывает появление ошибки в кодовых измерениях псевдодальности, однако может не затронуть измерения НОС, которые выполняются на вершине корреляционного пика. Такие эффекты построенная оценка также не учитывает.
Для устранения этого недостатка предлагается использовать построенную оценку ошибки многолучевости лишь в том случае, когда имеется существенная корреляция между кодовыми измерениями НП и измерениями НОС. В качестве статистики, характеризующей такую корреляцию, применяется ковариация измерений НОС и НП . При этом сравнивают модуль ковариации с заданным порогом 33:  . В случае превышения заданного порога формируют окончательную оценку ошибки многолучевости 34 как среднее арифметическое двух упомянутых оценок ошибки многолучевости, а в случае непревышения заданного порога, ввиду бесполезности измерений НОС, используют в качестве окончательной оценки ошибки многолучевости 34 среднечастотную вариацию измерений НП
. В случае превышения заданного порога формируют окончательную оценку ошибки многолучевости 34 как среднее арифметическое двух упомянутых оценок ошибки многолучевости, а в случае непревышения заданного порога, ввиду бесполезности измерений НОС, используют в качестве окончательной оценки ошибки многолучевости 34 среднечастотную вариацию измерений НП  .
.
При формировании оценки дисперсии НОМ на основе полученного предложенным способом мгновенного значения зеркальной компоненты НОМ учитывается функция плотности распределения вероятностей оценки  . Согласно [10] распределение мгновенных значений гармонического сигнала со случайной фазой подчиняется закону арксинуса с дисперсией, равной половине квадрата амплитуды гармонического сигнала. Поскольку расчет защитных уровней на борту ЛА выполняется в предположении о нормальном законе ошибок псевдодальности, реальный закон распределения зеркальной компоненты ошибки многолучевости необходимо аппроксимировать нормальным законом. В результате, оценка дисперсии наземной ошибки многолучевости (НОМ) 30 определяется как половина квадрата оценки
. Согласно [10] распределение мгновенных значений гармонического сигнала со случайной фазой подчиняется закону арксинуса с дисперсией, равной половине квадрата амплитуды гармонического сигнала. Поскольку расчет защитных уровней на борту ЛА выполняется в предположении о нормальном законе ошибок псевдодальности, реальный закон распределения зеркальной компоненты ошибки многолучевости необходимо аппроксимировать нормальным законом. В результате, оценка дисперсии наземной ошибки многолучевости (НОМ) 30 определяется как половина квадрата оценки  .
.
Суть предложений относительно способа определения шумовой ошибки (на ЛККС и на борту ЛА) поясняется ниже.
В прототипе [2] предложен способ оценки уровня шума приемника, основанный на зависимости шумовой ошибки от отношения сигнал/шум, измеряемого навигационным приемником. Сущность этого способа заключается в том, что дисперсию ошибки системы слежения за задержкой (т.е. вариацию измерений псевдодальности) при известном отношении сигнал/шум нетрудно рассчитать по формуле:

где d - параметр коррелятора; BL - односторонняя шумовая полоса системы слежения за задержкой; С/N0 - отношение мощности сигнала к спектральной плотности мощности шума (измеряется приемником), λC - протяженность элемента С/А - кода радиосигнала.
Далее дисперсия  пересчитывается к выходу алгоритма кодово-фазовой фильтрации:
пересчитывается к выходу алгоритма кодово-фазовой фильтрации:

где α - коэффициент сглаживания алгоритма кодово-фазовой фильтрации псевдодальности;  - дисперсия шумовой ошибки.
- дисперсия шумовой ошибки.
Этот способ обладает рядом недостатков, затрудняющих его применение в системе посадки ЛА:
1) Эффекты зеркальной многолучевости влияют на оценку отношения сигнал/шум наземного приемника, что существенно искажает результаты оценивания уровня шума приемника.
2) Способ не учитывает влияние эффектов диффузионной многолучевости на ошибки измерения псевдодальности.
3) Способ не учитывает влияние остаточной ошибки зеркальной многолучевости с интервалом корреляции менее 100 секунд (эта ошибка подавляется с помощью алгоритма кодово-фазовой фильтрации, но 100% подавление обеспечить невозможно).
С целью устранения перечисленных недостатков для определения дисперсии шумовой ошибки наземного и бортового приемников предлагается следующее.
Для определения вариации измерений псевдодальности вместо расчета формируется выборочная дисперсия, учитывающая как шумовую компоненту, так и диффузионную компоненту ошибки многолучевости. При этом в качестве статистики, характеризующей уровень ошибки, используется невязка алгоритма кодово-фазовой фильтрации псевдодальности, квадрат которой  , для получения выборочной дисперсии, сглаживается с помощью рекуррентного алгоритма [2]:
, для получения выборочной дисперсии, сглаживается с помощью рекуррентного алгоритма [2]:
 ,
,  ,
,
где γ - параметр, влияющий на ширину «скользящего окна», в котором вычисляется дисперсия шумовой ошибки.
При выборе параметра γ используется компромиссное решение: чем меньше значение γ (шире «скользящее окно»), тем точнее оценка  при условии стационарности процесса ΔФ(i); однако при изменении угла места спутника θ условия стационарности процесса ΔФ(i) нарушаются и чрезмерно увеличивать ширину «скользящего окна» нельзя. Рекомендуется выбирать значение параметра γ равным коэффициенту сглаживания α алгоритма кодово-фазовой фильтрации псевдодальности, т.е.
при условии стационарности процесса ΔФ(i); однако при изменении угла места спутника θ условия стационарности процесса ΔФ(i) нарушаются и чрезмерно увеличивать ширину «скользящего окна» нельзя. Рекомендуется выбирать значение параметра γ равным коэффициенту сглаживания α алгоритма кодово-фазовой фильтрации псевдодальности, т.е.
 ,
,
где ТФ - постоянная времени алгоритма кодово-фазовой фильтрации псевдодальности; Δt - интервал временной дискретизации, равный периоду повторения дифференциальных данных в сообщении ЛККС.
Пересчет величины вариации  к выходу алгоритма кодово-фазовой фильтрации (т.е. в значение
к выходу алгоритма кодово-фазовой фильтрации (т.е. в значение  ) выполняется в соответствии с (2).
) выполняется в соответствии с (2).
В предложенном способе производится определение дисперсии шумовой ошибки приемника в реальном времени и в комплексе с определением диффузионной компоненты ошибки многолучевости. Кроме того, учитывается остаточная ошибка зеркальной многолучевости с интервалом корреляции менее 100 секунд, присутствующая в невязке ΔФ(i), а также устраняется влияние среднечастотной ошибки зеркальной многолучевости на оценку дисперсии шумовой ошибки приемника.
Таким образом, введение в способ посадки ЛА новых операций контроля качества работы ЛККС, а также оценивания дисперсии наземной ошибки многолучевости и дисперсий шумовых ошибок на ЛККС и борту ЛА, позволяет повысить точность определяемых координат ЛА и достоверность их определения. Контроль качества работы ЛККС, сопровождаемый операциями выявления эффектов радиоинтерференции и оповещения пилота ЛА о наличии таких эффектов на ЛККС, способствует обеспечению безопасности полетов.
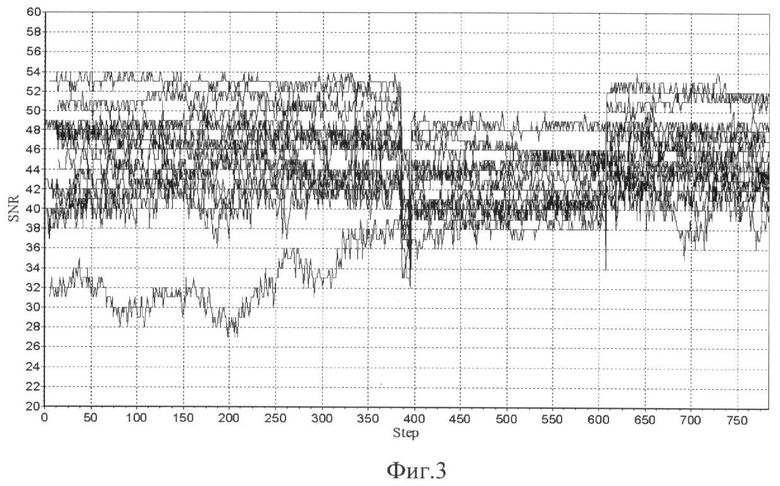
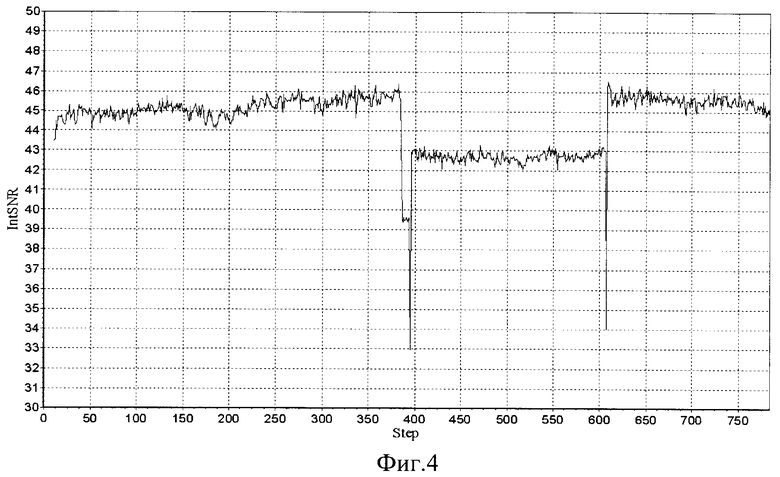
На графиках на Фиг.3-4 представлены результаты испытаний системы посадки при наличии эффектов радиоинтерференции (на Фиг.3. показаны отношения сигнал/шум приемника ЛККС при действии сигнала INMARSAT, на Фиг.4 - текущее значение НИОС для ЛККС). В непосредственной близости от антенны ЛККС действовала международная система связи INMARSAT, работающая в частотном диапазоне 1626,5-1660 МГц. В результате наблюдалось резкое снижение уровня отношения сигнал/шум в каналах приема GPS (Фиг.3, шаг: 400-600). Показанная на Фиг.4 зависимость от времени текущего значения НИОС демонстрирует возможность выявления эффектов радиоинтерференции на ЛККС.
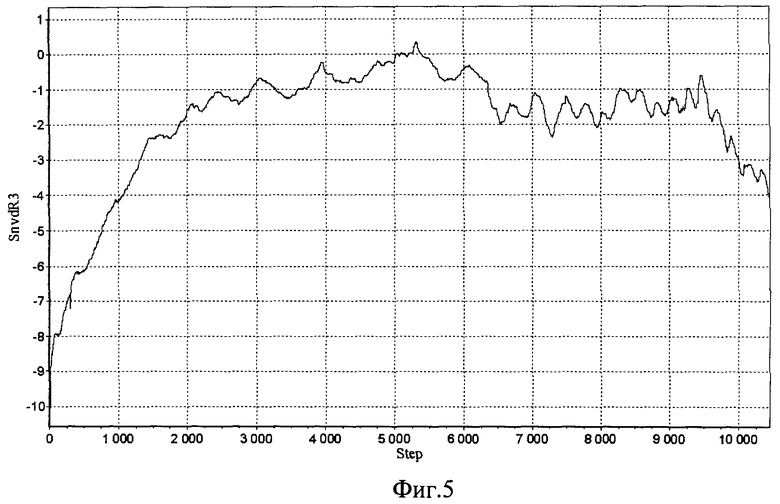
В качестве примера, иллюстрирующего формирование дисперсии НОП в ЛККС в соответствии с описанным выше способом, на Фиг.5 приведены результаты формирования дифференциальной поправки псевдодальности для одного спутника GPS на временном интервале 3 часа, на Фиг.6 - показатель ЛККС GAD-A и среднеквадратическое значение наземной ошибки псевдодальности (СКО НОП). Эффекты зеркальной многолучевости (с интервалом корреляции до 500 секунд) проявились на последнем часе эксперимента (Фиг.6, шаг: 6500-10500). В соответствии с этим формирование наземной ошибки псевдодальности в течение первых 2-х часов эксперимента (шаг: 0-6500) выполнялось без участия измерений отношения сигнал/шум наземного приемника (использовалась статистика  ). В течение последнего часа эксперимента (шаг: 6500-10500) формирование наземной ошибки псевдодальности выполнялось с использованием кодовых и фазовых измерений псевдодальности, а также измерений отношения сигнал/шум наземного приемника в соответствии с (1).
). В течение последнего часа эксперимента (шаг: 6500-10500) формирование наземной ошибки псевдодальности выполнялось с использованием кодовых и фазовых измерений псевдодальности, а также измерений отношения сигнал/шум наземного приемника в соответствии с (1).
Источники информации
1. Патент США №5361212, кл. G01S 5/00, заявл. 11.02.92 г., опубл. 01.11.1994 г.
2. Патент РФ №2331901, кл. G01S 5/02, Н04В 1/06, заявл. №2007128023/09(030512) 17.07.2007 г., положит. решение от 05.02.2008 г., опубл. БИ №23 20.08.2008 г.
3. RTCA DO-246C, GNSS Based Precision Approach Local Area Augmentation System (LAAS) - Signal-in-Space Interface Control Document (ICD) [Electronic resource] // Radio Technical Commission for Aeronautics, April 07, 2005. - Режим доступа: http://www.rtca.org/doclist.asp.
4. Shau-Shiun Jan. Aircraft Landing Using a Modernized Global Positioning System And the Wide Area Augmentation System. A dissertation submitted to the department of aeronautics and astronautics and committee on graduate studies of Stanford University in partial fulfillment of the requirements for the degree of doctor of philosophy. May 2003. [Electronic resource]/ Режим доступа: http://waas.stanford.edu/pubs/index.htm.
5. Соловьев Ю.А. Спутниковая навигация и ее приложения [Текст] / Ю.А.Соловьев. - М.: Эко-Трендз, 2003.
6. Akos D. Radio Frequency Interference Validation Testing for LAAS using the Stanford Integrity Monitor Testbed [Electronic resource] / D.Akos, P.Enge, M.Luo, S.Pullen, G.Xie // The GPS Research Laboratory of the Stanford University, 2003. - Режим доступа: http://waas.stanford.edu/pubs/index.htm.
7. Соколов А.А. Оценка ошибок дифференциальных поправок ЛККС авиационного назначения. Автореферат диссертации на соискание ученой степени кандидата технических наук. С-Пб., 2005 г.
8. Тарасов В.Г. Межсамолетная навигация. - М.: Машиностроение, 1980 г.
9. Казаринов Ю.М., Соколов А.И., Юрченко Ю.С. Проектирование устройств фильтрации радиосигналов. - Л., Изд-во ЛГУ, 1985 г.
10. Заездный A.M. Основы расчетов по статистической радиотехнике. - М.: Связь, 1969 г.
11. Category I Local Area Augmentation System Ground Facility [Electronic resource]: Specification FAA-E-2937A // U.S.Department of Transportation Federal Aviation Administration, April 17, 2002. - Режим доступа: http://gps.faa.gov/Library.
12. Бронштейн И.Н., Семендяев К.А. Справочник по математике. - М.: Наука, 1965 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И СИСТЕМА ПОСАДКИ НА ЕГО ОСНОВЕ | 2007 |
|
RU2331901C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И СИСТЕМА ПОСАДКИ НА ЕГО ОСНОВЕ | 2008 |
|
RU2371737C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2536768C1 |
| СИСТЕМА ВЫСОКОТОЧНОЙ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2287838C2 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО ДАННЫМ ПРИЕМНИКОВ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2388008C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗДУШНЫМ СУДНОМ ВНЕШНЕЙ ИМИТАЦИОННОЙ ПОМЕХИ, ВНОСЯЩЕЙ ОШИБКУ В ОПРЕДЕЛЕНИЕ ЕГО МЕСТОПОЛОЖЕНИЯ | 2019 |
|
RU2708679C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СПОСОБ ПОВЫШЕНИЯ ЦЕЛОСТНОСТИ ИСПОЛЬЗУЕМЫХ СИГНАЛОВ НАВИГАЦИОННЫХ СПУТНИКОВ С ПОМОЩЬЮ ЛОКАЛЬНОЙ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ (ЛККС) С УЧЕТОМ ВЛИЯНИЯ АНОМАЛЬНОЙ ИОНОСФЕРЫ | 2013 |
|
RU2542326C1 |

Изобретение относится к области навигации летательных аппаратов (ЛА) с использованием искусственных спутников земли. Достигаемым техническим результатом изобретения является повышение достоверности определения координат ЛА. Для достижения указанного результата в заявленном способе определяют дифференциальные поправки к измеряемым на борту ЛА псевдодальностям относительно спутников, учитывают погрешности, вносимые переотражениями спутниковых сигналов, дополнительно на локальной контрольно-корректирующей станции (ЛККС) контролируют и передают на борт ЛА уровень помех из-за радиоинтерференции спутниковых сигналов и сигналов иных радиотехнических систем, при этом для оценки уровня помех приемника ЛККС введена величина интегрального отношения сигнал/шум, определяемая как усредненное значение отношений сигнал/шум для сигналов всех используемых спутников. На ЛККС и на борту ЛА дополнительно формируют диаграммы временного распределения прогнозируемых наземного и бортового интегральных отношений сигнал/шум (НИОС и БИОС) путем усреднения наземных и бортовых отношений сигнал/шум (НОС и БОС) для каждого спутника в условиях нормальной помеховой обстановки, вводят упомянутые диаграммы соответственно в наземную и бортовую базы данных, по которым непрерывно определяют прогнозируемые значения НИОС и БИОС в соответствии с текущим временем и используемой группой спутников, непрерывно сравнивают значения оценок дисперсий наземной и бортовой ошибок многолучевости (НОМ и БОМ) для каждого спутника с заданным порогом и выявляют соответственно на ЛККС и на борту ЛА первые и вторые группы спутников, для которых значение оценки дисперсии НОМ и БОМ оказывается, соответственно, ниже и выше заданного порога, при этом с помощью измерений НОС и БОС для первых групп спутников определяют текущее значение НИОС и БИОС путем вычисления взвешенных средних значений измерений НОС и БОС, причем весовые коэффициенты взвешенных средних значений связывают с углом места этих спутников функциональными зависимостями, при этом измерения НОС и БОС для второй группы спутников не используются при определении текущего значения НИОС и БИОС. Одновременно на ЛККС формируют показатель целостности и непрерывности ЛККС и транслируют его на борт ЛА в общем пакете информации, при этом на ЛККС производят сравнение текущего и прогнозируемого значений НИОС и в случае превышения прогнозируемого значения на заданную пороговую величину значение показателя целостности и непрерывности ЛККС устанавливают в состояние тревоги, а в случае непревышения прогнозируемого значения на заданную пороговую величину корректируют хранящееся в базе данных прогнозируемое значение НИОС с помощью его текущего значения. На борту ЛА производят прием в общем пакете информации и анализ упомянутого показателя целостности и непрерывности ЛККС и, если его значение находится в состоянии тревоги, запрещают коррекцию псевдодальностей с помощью дифференциальных поправок и формируют соответствующее предупреждение о снижении точности системы посадки, производят сравнение текущего и прогнозируемого значений БИОС и, в случае превышения прогнозируемого значения на заданную пороговую величину формируют сигнал тревоги, запрещающий использование спутниковой системы для целей посадки ЛА, а в случае непревышения прогнозируемого значения на заданную пороговую величину корректируют хранящееся в базе данных прогнозируемое значение БИОС с помощью его текущего значения. 3 з.п. ф-лы, 6 ил.
1. Способ посадки летательных аппаратов с использованием спутниковой навигационной системы, состоящий в том, что определяют текущие координаты летательного аппарата по ориентации относительно нескольких спутников с известными координатами, для чего производят прием сигналов спутников с помощью бортового приемника, измеряя бортовые псевдодальности и отношения сигнал/шум, одновременно производят прием сигналов спутников на локальной контрольно-корректирующей станции с известным местоположением с помощью наземного приемника, измеряя наземные псевдодальности и отношения сигнал/шум, вычисляют для каждого спутника дифференциальные поправки псевдодальностей, одновременно на локальной контрольно-корректирующей станции формируют для каждого спутника оценки дисперсии наземной ошибки многолучевости, по значениям которых и одновременно вычисляемым для каждого спутника значениям дисперсии шумовой ошибки наземного приемника вычисляют значения дисперсии наземной ошибки псевдодальности в виде суммы оценки значений дисперсии наземной ошибки многолучевости и дисперсии шумовой ошибки наземного приемника, определяют среднеквадратические значения наземной ошибки псевдодальности для каждого спутника, транслируют координаты заданной глиссады, упомянутые дифференциальные поправки псевдодальностей и среднеквадратические значения наземной ошибки псевдодальности для каждого спутника через линию передачи данных на борт летательного аппарата в общем пакете информации, а на борту производят прием в общем пакете информации упомянутых дифференциальных поправок псевдодальностей, среднеквадратических значений наземной ошибки псевдодальности и координат заданной глиссады, с помощью дифференциальных поправок псевдодальностей корректируют значения бортовых псевдодальностей, с помощью среднеквадратических значений наземной ошибки псевдодальности вычисляют значения дисперсии наземной ошибки псевдодальности для каждого спутника, одновременно формируют для каждого спутника оценки дисперсии бортовой ошибки многолучевости и вычисляют значения дисперсии шумовой ошибки бортового приемника, далее вычисляют значения дисперсии бортовой суммарной ошибки псевдодальности как сумму оценки значений дисперсии бортовой ошибки многолучевости, дисперсии шумовой ошибки бортового приемника и дисперсии наземной ошибки псевдодальности, и далее, используя откорректированные с помощью дифференциальных поправок значения бортовых псевдодальностей и дисперсии бортовой суммарной ошибки псевдодальности, вычисляют текущие уточненные координаты летательного аппарата, оценивают достоверность их вычисления и формируют отклонения уточненных координат от заданной глиссады, отличающийся тем, что для оценки уровня помех приемника введена величина интегрального отношения сигнал/шум, определяемая как усредненное значение отношений сигнал/шум для всех используемых спутников, при этом на локальной контрольно-корректирующей станции дополнительно формируют диаграмму временного распределения прогнозируемого наземного интегрального отношения сигнал/шум путем усреднения наземных отношений сигнал/шум для каждого спутника в условиях нормальной помеховой обстановки, вводят упомянутую диаграмму в наземную базу данных, непрерывно по наземной базе данных определяют прогнозируемое значение наземного интегрального отношения сигнал/шум в соответствии с текущим временем и используемой группой спутников, непрерывно сравнивают значение оценки дисперсии наземной ошибки многолучевости для каждого спутника с заданным порогом и выявляют первую и вторую группы спутников, для которых значение оценки дисперсии наземной ошибки многолучевости оказывается, соответственно, ниже и выше заданного порога, при этом с помощью измерений наземных отношений сигнал/шум для первой группы спутников определяют текущее значение наземного интегрального отношения сигнал/шум путем вычисления взвешенного среднего значения измерений наземных отношений сигнал/шум, причем весовые коэффициенты взвешенного среднего значения связывают с углом места этих спутников функциональной зависимостью, выбираемой так, чтобы устранить скачкообразное изменение текущего значения наземного интегрального отношения сигнал/шум во времени, а измерения наземных отношений сигнал/шум для второй группы спутников не используются при определении текущего значения наземного интегрального отношения сигнал/шум, непрерывно формируют показатель целостности и непрерывности локальной контрольно-корректирующей станции и транслируют его на борт летательного аппарата в упомянутом общем пакете информации, при этом также непрерывно на локальной контрольно-корректирующей станции производят сравнение текущего и прогнозируемого значений наземного интегрального отношения сигнал/шум и, в случае превышения прогнозируемого значения на заданную пороговую величину, значение упомянутого показателя целостности и непрерывности устанавливают в состояние тревоги, а в случае непревышения упомянутого прогнозируемого значения на заданную пороговую величину корректируют хранящееся в базе данных прогнозируемое значение наземного интегрального отношения сигнал/шум с помощью его текущего значения, а на борту летательного аппарата формируют диаграмму временного распределения прогнозируемого бортового интегрального отношения сигнал/шум путем усреднения бортовых отношений сигнал/шум для каждого спутника в условиях нормальной помеховой обстановки, вводят упомянутую диаграмму в бортовую базу данных, непрерывно по бортовой базе данных определяют прогнозируемое значение бортового интегрального отношения сигнал/шум в соответствии с текущим временем и используемой группой спутников, непрерывно сравнивают значение оценки дисперсии бортовой ошибки многолучевости для каждого спутника с заданным порогом и выявляют первую и вторую группы спутников, для которых значение оценки дисперсии бортовой ошибки многолучевости оказывается, соответственно, ниже и выше заданного порога, при этом с помощью измерений бортовых отношений сигнал/шум для первой группы спутников определяют текущее значение бортового интегрального отношения сигнал/шум путем вычисления взвешенного среднего значения измерений бортовых отношений сигнал/шум, причем весовые коэффициенты взвешенного среднего значения связывают с углом места этих спутников функциональной зависимостью, выбираемой так, чтобы устранить скачкообразное изменение текущего значения бортового интегрального отношения сигнал/шум во времени, а измерения бортовых отношений сигнал/шум для второй группы спутников не используются при определении текущего значения бортового интегрального отношения сигнал/шум, производят прием в общем пакете информации и анализ упомянутого показателя целостности и непрерывности и, если его значение находится в состоянии тревоги, запрещают коррекцию псевдодальностей с помощью дифференциальных поправок и формируют соответствующее предупреждение о снижении точности системы, одновременно производят сравнение текущего и прогнозируемого значений бортового интегрального отношения сигнал/шум и, в случае превышения прогнозируемого значения на заданную пороговую величину формируют сигнал тревоги, запрещающий использование спутниковой системы для целей посадки летательного аппарата, а в случае непревышения упомянутого прогнозируемого значения на заданную пороговую величину корректируют хранящееся в базе данных прогнозируемое значение бортового интегрального отношения сигнал/шум с помощью его текущего значения.
2. Способ по п.1, отличающийся тем, что на локальной контрольно-корректирующей станции прием сигналов спутников выполняется в общем случае с помощью М наземных приемников, в каждом из которых производится формирование и сравнение текущего и прогнозируемого значений наземного интегрального отношения сигнал/шум, причем состояние показателя целостности и непрерывности локальной контрольно-корректирующей станции устанавливается в состояние тревоги в случае, если для L из М наземных приемников произошло превышение прогнозируемого значения наземного интегрального отношения сигнал/шум относительно его текущего значения на заданную пороговую величину.
3. Способ по п.1, отличающийся тем, что на локальной контрольно-корректирующей станции при формировании для каждого спутника оценки дисперсии наземной ошибки многолучевости с использованием кодовых и фазовых измерений наземных псевдодальностей и отношений сигнал/шум предварительно формируют среднечастотную вариацию измерений наземных отношений сигнал/шум и среднечастотную вариацию измерений наземных псевдодальностей, вычисляют произведение упомянутых вариаций и определяют ковариацию измерений наземных отношений сигнал/шум и псевдодальностей путем сглаживания этого произведения, определяют сглаженное значение квадрата среднечастотной вариации измерений наземных отношений сигнал/шум, формируют первую оценку ошибки многолучевости путем умножения среднечастотной вариации измерений наземных отношений сигнал/шум на ковариацию и деления результата на сглаженное значение квадрата среднечастотной вариации измерений наземных отношений сигнал/шум, определяют оценку дисперсии наземной ошибки многолучевости путем возведения в квадрат оценки ошибки многолучевости, при этом дополнительно производят компенсацию скоростной динамической ошибки в среднечастотных вариациях измерений наземных отношений сигнал/шум и измерений псевдодальностей, определяют сглаженное значение квадрата среднечастотной вариации измерений наземных псевдодальностей, формируют дополнительную оценку ошибки многолучевости путем умножения среднечастотной вариации измерений наземных отношений сигнал/шум на сглаженный квадрат среднечастотной вариации измерений наземных псевдодальностей и деления результата на упомянутую ковариацию, сравнивают модуль ковариации с заданным порогом и, перед определением оценки дисперсии наземной ошибки многолучевости производят формирование окончательной оценки ошибки многолучевости таким образом, что в случае превышения заданного порога формируют окончательную оценку ошибки многолучевости как среднее арифметическое двух упомянутых оценок ошибки многолучевости, а в случае непревышения заданного порога используют в качестве окончательной оценки ошибки многолучевости среднечастотную вариацию измерений наземных псевдодальностей.
4. Способ по п.1, отличающийся тем, что на локальной контрольно-корректирующей станции вычисление значений дисперсии шумовой ошибки наземного приемника производится в комплексе с определением дисперсии диффузионной компоненты наземной ошибки многолучевости, а на борту летательного аппарата вычисление значений дисперсии шумовой ошибки бортового приемника производится в комплексе с определением дисперсии диффузионной компоненты бортовой ошибки многолучевости, при этом формируют на локальной контрольно-корректирующей станции и на борту летательного аппарата выборочные дисперсии высокочастотной вариации измерений наземных псевдодальностей, пересчитывают упомянутые дисперсии в значения дисперсии шумовых ошибок с учетом сглаживающих свойств алгоритма совместной фильтрации кодовых и фазовых измерений псевдодальностей.
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И СИСТЕМА ПОСАДКИ НА ЕГО ОСНОВЕ | 2007 |
|
RU2331901C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПИЛОТАЖНО-НАВИГАЦИОННОЙ ИНФОРМАЦИИ НА МНОГОФУНКЦИОНАЛЬНОМ ИНДИКАТОРЕ ДЛЯ ВЫПОЛНЕНИЯ ПОСАДКИ | 2005 |
|
RU2297596C1 |
| СПУТНИКОВАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1999 |
|
RU2158000C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ И ПОСАДКИ | 2002 |
|
RU2236020C2 |
| US 6239745 B1, 29.05.2001 | |||
| US 5702070 A, 30.12.1997 | |||
| US 4894655 A, 16.01.1990 | |||
| US 2005273220 A1, 08.12.2005. | |||

