Изобретение относится к гироскопическим приборам, а именно к датчикам угловой скорости, основанным на Кориолисовых силах, и может быть использовано для измерения угловой скорости.
Известен интегральный микромеханический гироскоп [CN 103398708 В, МПК G01C 19/5733, опубл. 21.10.2015], содержащий рамку, закрепленную на подложке при помощи упругих перемычек, с расположенными на ней гребенчатыми структурами вибропривода. Два промежуточных тела, расположенные внутри рамки на упругих перемычках, предназначенных для развязки первичных и вторичных колебаний. Внутри каждого промежуточного тела расположено инерционное тело, подвешенное на упругих перемычках. На каждом инерционном теле присутствуют сенсорные электроды для детектирования полезного сигнала. Колебания инерционных тел, представляющих собой полезный сигнал, возникают вследствие действия сил Кориолиса на промежуточные тела при наличии угловой скорости. Конструкция гироскопа имеет две степени свободы, что позволяет измерять одну составляющую угловой скорости.
Известен интегральный микромеханический гироскоп [ЕР 1309834 В1, МПК G01C 19/56, опубл. 14.05.2003], содержащий гребенчатый привод, соединенный с промежуточным телом через упругие перемычки таким образом, что он может совершать только первичные колебания. Сенсорные электроды соединены с промежуточным телом упругими перемычками таким образом, что могут совершать только вторичные колебания. Движение сенсорных электродов возникает при колебаниях промежуточного тела в двух плоскостях вследствие действия на него силы Кориолиса при вращении основания. Гироскоп способен измерять одну составляющую угловой скорости, так как конструкция гироскопа обладает двумя степенями свободы.
Наиболее близким аналогом является интегральный микромеханический гироскоп [US 6691571 В2, МПК G01C 19/5747, опубл. 02.10.2003], выполненный из полупроводникового материала и содержащий закрепленную на диэлектрическом основании при помощи упругих перемычек рамку, с расположенными на ней гребенчатыми структурами вибропривода, промежуточное тело, закрепленное на упругих перемычках внутри рамки, и инерционное тело, которое расположено на упругих перемычках внутри промежуточного тела, а также закреплено через упругие перемычки в неподвижных анкерах. Для детектирования полезного сигнала используются сенсорные электроды, подвижные части которых расположены на инерционном теле, а неподвижные зафиксированы на диэлектрическом основании. Упругий подвес гироскопа имеет такую конструкцию, что рамка может совершать только первичные колебания, а инерционное тело только вторичные. Обеспечение двух степеней свободы конструкции позволяет гироскопу измерять только одну составляющую угловой скорости.
Недостатком данных гироскопов является невозможность измерения двух составляющих угловой скорости.
Задача предлагаемого изобретения - обеспечение измерения двух составляющих угловой скорости.
Предложенный интегральный микромеханический гироскоп, так же как в прототипе, выполнен из полупроводникового материала и содержит рамку, закрепленную в неподвижных анкерах через упругие перемычки (4). На рамке выполнены гребенчатые структуры вибропривода. Первое промежуточное тело (7) закреплено на упругих перемычках (9) внутри рамки, а первое инерционное тело (11) расположено на упругих перемычках (12) внутри первого промежуточного тела (7) и связано с неподвижными анкерами (13) через упругие перемычки (14). На первом инерционном теле (11) выполнены подвижные части сенсорных электродов (15), неподвижные части которых закреплены на диэлектрическом основании. Анкеры, неподвижные части вибропривода, неподвижные части сенсорных электродов зафиксированы на диэлектрическом основании.
Согласно изобретению внутри рамки дополнительно расположено второе промежуточное тело (8), которое связано с рамкой через упругие перемычки (10). Второе инерционное тело (16) расположено внутри второго промежуточного тела (8) и связано с ним через упругие перемычки (17), а также связано с неподвижными анкерами (18) через упругие перемычки (19). Под вторым инерционным телом (16) расположен неподвижный планарный электрод, закрепленный на диэлектрическом основании.
Рамка, инерционные и промежуточные тела, а также упругие перемычки и подвижные части гребенчатых структур расположены с зазором относительно диэлектрического основания и выполнены из полупроводникового материала.
Предложенный вариант конструкции интегрального микромеханического гироскопа, который содержит дополнительно второе промежуточное тело и второе инерционное тело позволяет устройству измерять две составляющие угловой скорости.
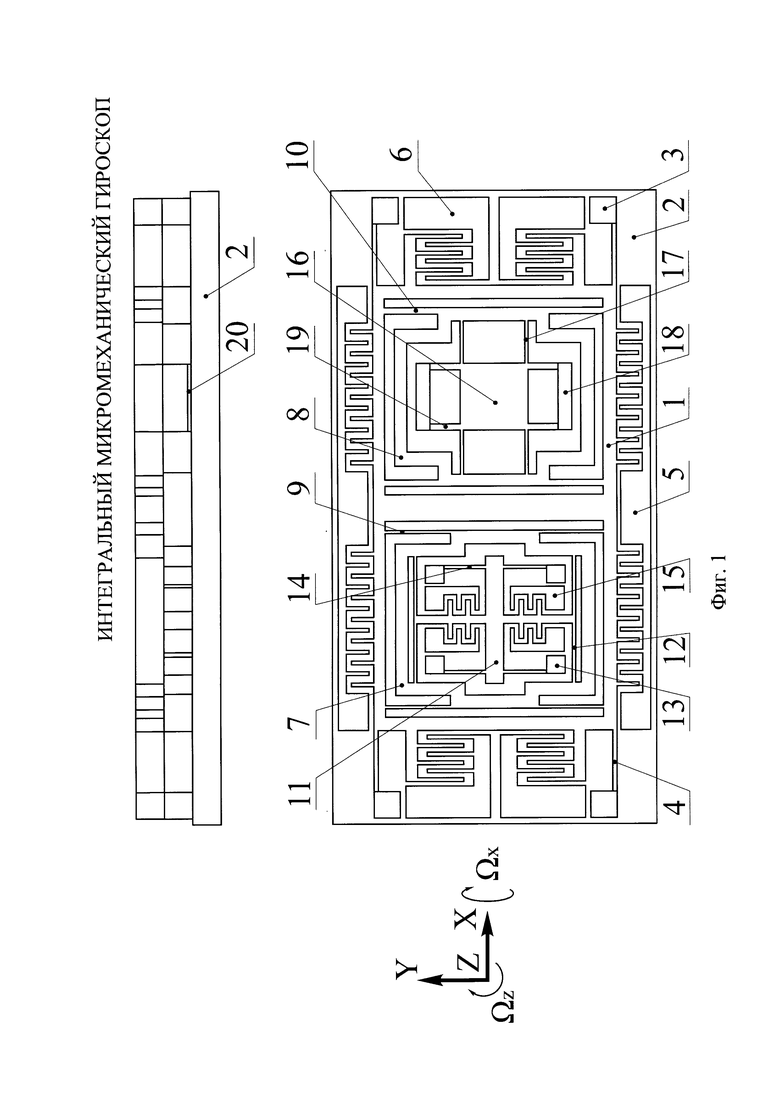
На фиг. 1 представлена принципиальная схема интегрального микромеханического гироскопа.
Интегральный микромеханический гироскоп, выполненный из полупроводникового материала, содержит рамку 1, закрепленную на диэлектрическом основании 2 в неподвижных анкерах 3 через упругие перемычки 4. На рамке 1 расположены подвижные части гребенчатых структур 5 и 6 вибропривода. Неподвижные части вибропривода закреплены на диэлектрическом основании 2. Внутри рамки расположены первое 7 и второе 8 промежуточные тела. Первое промежуточное тело 7 связано с рамкой 1 через упругие перемычки 9. Второе промежуточное тело 8 связано с рамкой 1 через упругие перемычки 10. Первое инерционное тело 11 расположено внутри первого промежуточного тела 7 и связано с ним через упругие перемычки 12, а также связано с неподвижными анкерами 13 через упругие перемычки 14. На первом инерционном теле 11 выполнены подвижные части сенсорных электродов 15, неподвижные части которых закреплены на диэлектрическом основании 2. Второе инерционное тело 16 расположено внутри второго промежуточного тела 8 и связано с ним через упругие перемычки 17, также связано с неподвижными анкерами 18 через упругие перемычки 19. Под вторым инерционным телом 16 расположен неподвижный планарный электрод 20.
Неподвижные анкеры 3, 13 и 18, неподвижные части 5 и 6 вибропривода, неподвижные части сенсорных электродов 15 и планарный электрод 20 зафиксированы на диэлектрическом основании 2.
Устройство работает следующим образом.
Рамка 1 вместе с промежуточными телами 7 и 8 совершают первичные колебания, вектор мгновенной скорости которых направлен вдоль оси Y. Первичные колебания возбуждаются электростатическими силами, действующими со стороны вибропривода 5 и 6. При наличии угловой скорости Ωz вектор мгновенной скорости промежуточного тела 7 не совпадает с направлением оси Y, а имеет проекцию на ось X вследствие действия на него силы Кориолиса. Вследствие большой жесткости упругих перемычек 12 в направлении оси X инерционное тело 11 совершает колебания, вектор мгновенной скорости которых направлен вдоль оси X и равен по величине проекции мгновенной скорости промежуточного тела 7 на ось X. При этом амплитуда перемещений инерционного тела 11 пропорциональна угловой скорости Ωz. Вследствие малой жесткости упругих перемычек 12 и большой жесткости упругих перемычек 14 в направлении оси Y инерционное тело 11 не участвует в первичном движении. Для регистрации перемещений инерционного тела 11 предусмотрены сенсорные электроды 15.
При наличии угловой скорости Ωx вектор мгновенной скорости промежуточного тела 8 не совпадает с направлением оси Y, а имеет проекцию на ось Z вследствие действия на него силы Кориолиса. Вследствие большой жесткости упругих перемычек 17 в направлении оси Z инерционное тело 16 совершает колебания, вектор мгновенной скорости которых направлен вдоль оси Z и равен по величине проекции мгновенной скорости промежуточного тела 8 на ось Z. При этом амплитуда перемещений инерционного тела 16 пропорциональна угловой скорости Ωx. Вследствие малой жесткости упругих перемычек 17 и большой жесткости упругих перемычек 19 в направлении оси Y инерционное тело 16 не участвует в первичном движении. Для регистрации перемещений инерционного тела 16 предусмотрен планарный электрод 20, подвижной частью сенсорной емкости является само инерционное тело 16.
Наличие в конструкции двух инерционных тел 11 и 16 позволяет устройству измерять две составляющие угловой скорости Ωz и Ωx.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2007 |
|
RU2353903C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2012 |
|
RU2490593C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2012 |
|
RU2503924C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2008 |
|
RU2400706C2 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР НА ОСНОВЕ УГЛЕРОДНЫХ НАНОТРУБОК | 2011 |
|
RU2455652C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2007 |
|
RU2351897C1 |
| ТРЁХОСЕВОЙ МИКРОМЕХАНИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2018 |
|
RU2693010C1 |
| Интегральный микромеханический гироскоп | 2021 |
|
RU2778622C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2018 |
|
RU2684427C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП НА ОСНОВЕ УГЛЕРОДНЫХ НАНОТРУБОК | 2006 |
|
RU2304273C1 |
Изобретение относится к гироскопическим приборам, а именно к датчикам угловой скорости, основанным на Кориолисовых силах, и может быть использовано для измерения угловой скорости. Интегральный микромеханический гироскоп, выполненный из полупроводникового материала, содержит рамку, закрепленную на диэлектрическом основании в неподвижных анкерах через упругие перемычки (4). На рамке выполнены гребенчатые структуры вибропривода. Первое промежуточное тело (7) закреплено на упругих перемычках (9) внутри рамки. Первое инерционное тело (11) расположено на упругих перемычках (12) внутри первого промежуточного тела (7) и связано с неподвижными анкерами (13) через упругие перемычки (14). На первом инерционном теле (1) выполнены подвижные части сенсорных электродов (15), неподвижные части которых закреплены на диэлектрическом основании. Анкеры, неподвижные части вибропривода, неподвижные части сенсорных электродов зафиксированы на диэлектрическом основании. Внутри рамки дополнительно расположено второе промежуточное тело (8), которое связано с рамкой через упругие перемычки (10). Второе инерционное тело (16) расположено внутри второго промежуточного тела (8) и связано с ним через упругие перемычки (17), а также связано с неподвижными анкерами (18) через упругие перемычки (19). Под вторым инерционным телом (16) расположен неподвижный планарный электрод, закрепленный на диэлектрическом основании. Данное изобретение позволяет проводить измерения двух составляющих угловой скорости. 1 ил.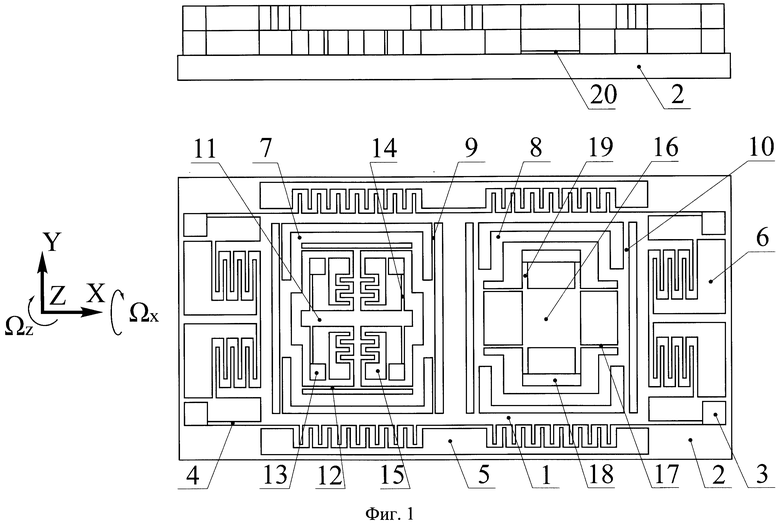
Интегральный микромеханический гироскоп, выполненный из полупроводникового материала, содержит рамку, закрепленную на диэлектрическом основании в неподвижных анкерах через упругие перемычки (4), на рамке выполнены гребенчатые структуры вибропривода, первое промежуточное тело (7) закреплено на упругих перемычках (9) внутри рамки, а первое инерционное тело (11) расположено на упругих перемычках (12) внутри первого промежуточного тела (7) и связано с неподвижными анкерами (13) через упругие перемычки (14), на первом инерционном теле (11) выполнены подвижные части сенсорных электродов (15), неподвижные части которых закреплены на диэлектрическом основании, при этом анкеры, неподвижные части вибропривода, неподвижные части сенсорных электродов зафиксированы на диэлектрическом основании, отличающийся тем, что внутри рамки дополнительно расположено второе промежуточное тело (8), которое связано с рамкой через упругие перемычки (10), второе инерционное тело (16) расположено внутри второго промежуточного тела (8) и связано с ним через упругие перемычки (17), а также связано с неподвижными анкерами (18) через упругие перемычки (19), под вторым инерционным телом (16) расположен неподвижный планарный электрод, закрепленный на диэлектрическом основании.
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2012 |
|
RU2503924C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2266521C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2007 |
|
RU2351896C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 7513155 B2, 07.04.2009. | |||

