Изобретение относится к радиолокации и может быть использовано в радиолокаторах кругового обзора для измерения угла места (высоты) низколетящих целей под малыми углами места при наличии мешающих отражений от подстилающей поверхности.
В трехкоординатных радиолокаторах различного назначения при измерении угломестных координат возникает проблема, обусловленная снижением точности оценивания угла места (высоты) обнаруженных низколетящих целей из-за явления многолучевости, порожденного отражениями эхо-сигналов от подстилающей поверхности. Наиболее значительное влияние на точность измерения обнаруженной цели явление многолучевости оказывает в радиолокационных станциях низколетящих целей. Для борьбы с явлением многолучевости при измерении угла места (высоты) разработаны различные методы, которые условно можно разделить на две группы.
К первой относятся способы, направленные на совершенствование антенных систем, заключающиеся в реализации узконаправленных по углу места диаграмм направленности антенн с целью уменьшения зоны взаимодействия главного луча диаграммы направленности антенны с подстилающей поверхностью (см., напр. [1]). Однако практическая реализация этих способов влечет за собой увеличение апертуры (размера) антенной системы, причем как по вертикали, так и по горизонтали. Другими словами, в основе этих способов - повышение угловой разрешающей способности по угловым координатам. Последний фактор также направлен на снижение зоны взаимодействия с подстилающей поверхностью. Реализация больших антенн является малоприемлемым решением для большинства радиолокаторов, предназначенных для обнаружения низколетящих целей, так как повышается конструктивно-технологическая сложность изделий, снижается мобильность и возникают затруднения по их размещению на высотных опорах.
Вторая группа способов определения угла места (высоты цели), основана на привлечении дополнительной информации о влиянии отражений от подстилающей поверхности и устранении или снижении эффективности этого влияния на оценку угла места (высоты) цели. К этой группе относится значительное число способов, базирующихся на моноимпульсном методе измерения угломестной координаты. Например, для устранения недостатков, вызванных влиянием многолучевости и в разной степени проявляющихся в верхнем и нижнем лучах диаграмм направленности антенн в моноимпульсных системах пеленгации (см., напр.[1]), применяются различные способы снижения этого влияния на оценку угла места как за счет использования дополнительных антенн [2, 3], так и за счет учета оценки мешающего влияния отраженного от поверхности эхо-сигнала путем решения специальных уравнений [2-6], обеспечивающих снижение отрицательного влияния на точность оценки угломестной координаты. К тому же при реализации способа [3] требуется проведение большого количества измерений, т.е. определение угла места является итерационной процедурой, которая вносит свои дополнительные погрешности в случае слабой отражательной способности цели. В способе [4] необходимо использовать априорные данные по интенсивности отражений от подстилающей поверхности, получаемые на основе информации о перепаде высот рельефа земной поверхности, содержащейся в цифровых картах местности, и его применение ограничено метровым диапазоном, способ [5] может быть реализован только в антеннах с горизонтальной поляризацией, использование способа [6] ограничено местностью с не очень сложной структурой подстилающей поверхности или с относительно ровной поверхностью, и его невозможно использовать в системах обзорного типа с механическим сканированием. Кроме того, задача оценки мешающего влияния отраженного от поверхности эхо-сигнала, в принципе, является сложной, необходимо учитывать фактор времени года и суток, метеоусловий, типа местности, что трудно реализовать.
Во всех рассмотренных выше способах для снижения отрицательного влияния многолучевости на точность измерения угла места низколетящих целей используемые приемы приводят либо к увеличению размера антенных систем, либо к дополнительным измерениям и решениям уравнений с использованием априорных или апостериорных данных параметров подстилающей поверхности, полученных в процессе дополнительных измерений. Необходимость выполнения дополнительных измерений снижает темп обзора пространства и приводит к увеличению времени обзора пространства, что неприемлемо для радиолокаторов, предназначенных для обнаружения низколетящих целей.
Наиболее близким по технической сущности к заявляемому способу является способ измерения высоты целей по методу V-образного луча, описанный, например, в монографии [6], стр. 274-275. В данном способе высота воздушного объекта определяется с использованием измерений дальности до цели и ее азимута на данной дальности, измеренных двумя специально ориентированными диаграммами направленности антенны. При реализации описанного в монографии метода V-луча антенная система имеет два луча - вертикальный и наклонный, плоскость последнего составляет с плоскостью вертикального луча угол в 45 градусов. В вертикальной плоскости диаграмма направленности формируется по закону типа cosecθ, где θ - угол плоскости луча, отсчитываемый от линии пересечения вертикального и наклонного лучей диаграммы направленности антенны. Ширина лучей в азимутальной плоскости выбирается исходя из требуемого разрешения по азимуту и обычно составляет единицы градусов. При методе V-луча оба луча антенной системы вращаются вокруг вертикальной оси. Для оценки высоты используются оценка дальности до цели и измерение азимутальной координаты в вертикальном и наклонном лучах диаграммы направленности. Однако поскольку метод V-луча предназначался для измерения высоты целей на больших и средних высотах, то вертикальный и наклонный лучи пересекаются в нижней части зоны ответственности (вблизи поверхности Земли). В связи с этим разность в оценках азимута низколетящих целей в вертикальных и наклонных лучах мала или равна нулю, в связи с чем сложно оценить высоту низколетящей цели под малыми углами места.
В предложенном способе аналогично методу V-луча используются две антенны, причем вертикальные и наклонные лучи пересекаются под углом 45 градусов в верхней зоне ответственности и разнесены в нижней части зоны ответственности (на поверхности Земли). Угол места (высота) обнаруженной цели определяется на одной дальности на основе разности измеренных азимутов в вертикальном и наклонном лучах и вычисляется по формуле:
εц=βГ-βΔ, h=Rнsinεц, где εц - оцениваемый угол места, h - высота цели, Rн - дальность до цели, βΔ - разность азимутов, βГ - ширина горизонтального луча между нижней кромкой вертикального и нижней кромкой наклонного лучей.
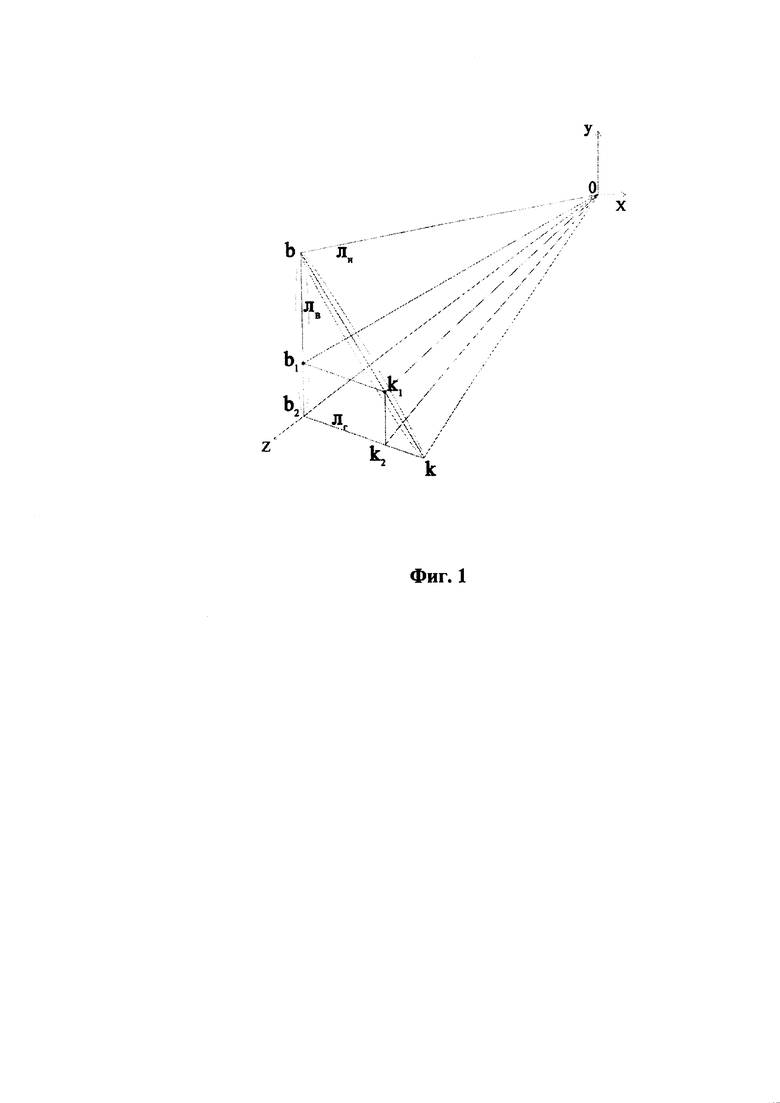
Существо предлагаемого способа можно пояснить с привлечением фиг. 1, где:
О - центр системы координат XYZ;
Лв - вертикальный луч, ориентированный вдоль оси z;
Лн - наклонный луч;
Лг - горизонтальный луч, являющийся проекцией Лн на горизонтальную плоскость;
ОВ - линия перечения горизонтального и наклонного лучей;
ОК - линия пересечения наклонного луча и горизонтальной плоскости;
B1 - точка нахождения цели в вертикальном луче;
K1 - точка нахождения цели в наклонном луче;
K2 - проекция точки K1 на горизонтальную плоскость;
В2 - проекция точки K1 на ось z;
На фиг. 1 радиолокатор (антенная система) находится в точке O (в центре системы координат XYZ). Оба луча антенной системы имеют сравнительно узкую диаграмму направленности по азимуту (например, 0,8-1°), вертикальный луч Лв (ориентированный на фиг. 1 вдоль оси z) и наклонный луч Лн неподвижны относительно друг друга и вместе вращаются вокруг оси Y. Вертикальный луч Лв имеет диаграмму направленности (угол ВОВ2=ε) в угломестной плоскости, составляющую единицы градусов (например, 6-10°). Наклонный луч Лн, пересекается с Лв в верхней зоне ответственности и наклонен по отношению к вертикальному лучу на 45°, лучи разнесены в нижней зоне ответственности на поверхности Земли. В этом случае горизонтальный луч Лг, являющийся проекцией Лн на горизонтальную плоскость, равен Лв (из построения). Следовательно, угол В2ОK равен углу ВОВ2 и равен ε.
Пусть цель находится в вертикальном луче в точке В1, а в наклонном луче в точке K1. Тогда. B1O=K1O=RH по определении B1B2=K1K2 и угол ВВ2К равен углу K1K2K и равен 90°. В то же время, поскольку угол K1K2K=углу K1K2O=90°, а катет K2O общий, тогда треугольник KOK1 равен треугольнику KOK2 и угол KOK2 равен углу K1OK2 и равен углу B1OB2=εц - искомому углу места. Угол места можно определить, зная азимут цели в луче Лв-β0 и азимут цели в луче наклона Лн-βн, получаем значение угла В2ОK2=βΔ=βн-β0. Тогда угол места цели εц=βГ-βΔ, а высота цели h=Rнsinεн.
Работоспособность приведенных соотношений проиллюстрируем на двух крайних случаях. Пусть цель находится в точке K. Тогда разность азимутов βΔ=углу KOB2=βГ, следовательно εц=βГ-βΔ=0, т.е. цель на поверхности Земли. Другой крайний случай - цель в точке B, βΔ=0, следовательно εц=βГ=ε.
ЛИТЕРАТУРА
1. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - М.: Радио и связь, 1984 г. - 312 с.
2. Патент на изобретение RU №2444750 C2, МПК G01S 5/08. Способ определения угломестной координаты низколетящей цели.
3. Патент на изобретение RU №2307375 C1, МПК G01S 13/04. Способ измерения угла места низколетящей цели и радиолокационная станция для его реализации.
4. Патент на изобретение RU №2291464 C2, МПК G01S 13/04, G01S 13/42, G01S 3/74. Способ измерения угла места целей при наличии отражений принимаемого эхосигнала от земной поверхности и импульсная наземная трехкоординатная радиолокационная станция для его реализации.
5. Патент на изобретение RU №2038607 C1, МПК G01S 13/02. Способ измерения угла места маловысотных целей.
6. Патент на изобретение RU №2392638 C1, МПК G01S 13/00. Способ высокоточного радиолокационного измерения угла места низколетящей цели в условиях интерференции сигналов.
7. Бакулев П.А. Радиолокационные системы.- М.: Радиотехника, 2004. - 320 с.
Изобретение относится к радиолокации и может быть использовано в трехкоординатных радиолокаторах кругового обзора для измерения угла места (высоты) низколетящих целей под малыми углами места, в том числе целей, летящих на предельно малых высотах (десятки метров от поверхности земли), при наличии мешающих отражений от подстилающей поверхности. Достигаемым техническим результатом изобретения является создание способа измерения угла места (высоты) низколетящих целей под малыми углами места в трехкоординатных радиолокаторах кругового обзора, позволяющего обеспечить минимизацию влияния явления многолучевости, вызванного переотражениями эхо-сигналов от подстилающей поверхности. Технический результат достигается благодаря тому, что вычисление угла места (высоты) обнаруженной цели производится на основе оценок координаты дальности и разности в оценке азимутов цели, измеряемых при прохождении вертикального и наклоненного на 45 градусов в угломестной плоскости лучей антенной системы через цель на одной дальности. 1 ил.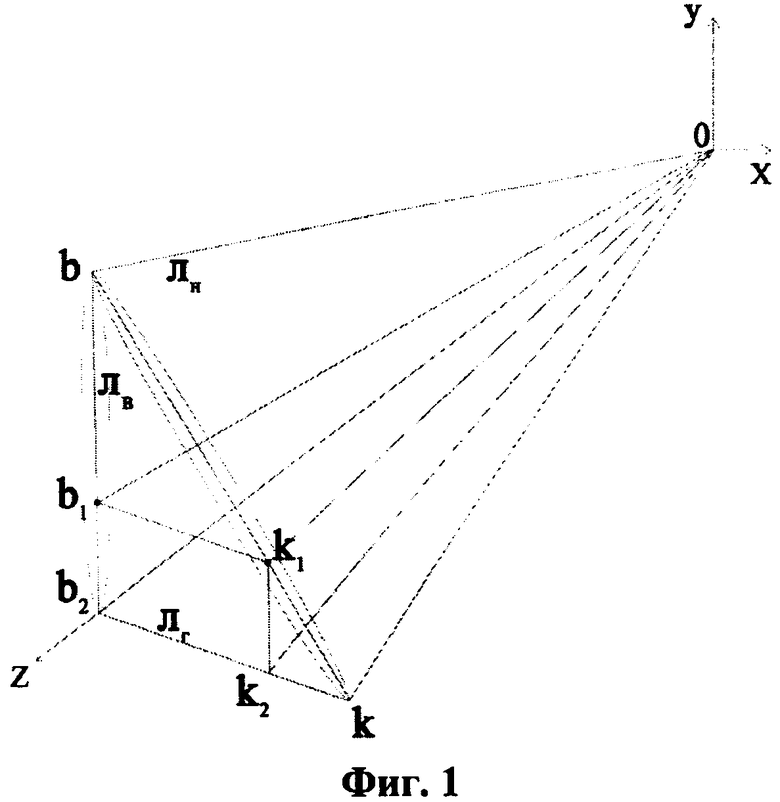
Способ измерения угла места (высоты) низколетящих целей под малыми углами места в трехкоординатных радиолокаторах кругового обзора при наличии мешающих отражений от подстилающей поверхности, характеризующийся тем, что в радиолокаторе кругового обзора излучаются и принимаются радиолокационные импульсные сигналы с помощью двух специально ориентированных одинаковых антенн, имеющих сравнительно узкую диаграмму направленности в азимутальной плоскости и достаточно широкую диаграмму направленности в угломестной плоскости, одна из антенн формирует вертикальный луч в угломестной плоскости, а другая антенна наклонный луч в угломестной плоскости, наклоненный относительно вертикального луча, оба луча неподвижны относительно друг друга и вместе вращаются вокруг вертикальной оси, отличающийся тем, что диаграммы направленности вертикального и наклонного лучей пересекаются в верхней зоне ответственности под углом 45 градусов и разнесены в нижней части зоны ответственности, а угол места (высота) обнаруженной цели определяется на одной дальности на основе разности измеренных азимутов в вертикальном и наклонном лучах и вычисляется по формуле:
εц=βГ-βΔ, h=Rнsinεц, где εц - оцениваемый угол места, h - высота цели, Rн - дальность до цели, βΔ - разность азимутов, βГ - ширина горизонтального луча между нижней кромкой вертикального и нижней кромкой наклонного лучей.
| СПОСОБ ВЫСОКОТОЧНОГО РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ УГЛА МЕСТА НИЗКОЛЕТЯЩЕЙ ЦЕЛИ В УСЛОВИЯХ ИНТЕРФЕРЕНЦИИ СИГНАЛОВ | 2009 |
|
RU2392638C1 |
| Способ контроля ведения химических процессов, например перегруппировки циклогексаноноксима в производстве капролактама | 1959 |
|
SU136588A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА МЕСТА И ДАЛЬНОСТИ НИЗКОЛЕТЯЩЕЙ ЦЕЛИ МОНОИМПУЛЬСНЫМ РАДИОЛОКАТОРОМ ПРИ МНОГОЛУЧЕВОМ РАСПРОСТРАНЕНИИ ОТРАЖЕННОГО ОТ ЦЕЛИ СИГНАЛА | 1994 |
|
RU2080619C1 |
| ДАЛЬНОМЕР ДЛЯ ОБНАРУЖЕНИЯ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ЦЕЛЕЙ НА ФОНЕ ПОМЕХОВЫХ ОТРАЖЕНИЙ ОТ ЗЕМЛИ | 1992 |
|
RU2038612C1 |
| US 6121915 A, 19.09.2000 | |||
| JP 2009180514 A, 13.08.2009 | |||
| JP 2013245949 A, 09.12.2013. | |||

