Техническое решение относится к технологии погружения в грунт забивных свай из металлических труб-оболочек при строительных работах.
Как известно [8], процесс погружения сваи включает установку (наведение) сваи, ее ориентирование, фиксацию и забивку в грунт посредством свайного погружателя (молота). При этом наиболее эффективными и в то же время достаточно простыми являются способы погружения посредством механического свайного молота, в которых грузом, поднятым лебедкой, ударяют по свае.
Известные технические решения погружения свай в грунт (например, продукция [7] фирм Финляндии и Голландии, патенты [3-6], RU 2052018 С2, 10.01.1996; RU 2166024 С2, 27.04.2001; RU 2315837 С2, 2008) не рассматривают вопросов свободного сброса ударной массы и оптимизации управления и контроля энергией ударов забивки, либо только декларируют их без конкретного установления режимов работы.
Оборудование гидравлических молотов [5-7]; SU 1159982 А, 07.06.1985; RU 2333316 С1, 10.09.2008; RU 2333317 С2, 10.09.2008; RU 2007113267 А, 27.10.2008) требует достаточно сложных составных узлов и элементов (гидроцилиндры, узлы управления их работой, гидроаккумуляторы, шланги гидропитания и др.). В отличие от гидромолотов более простыми в изготовлении и эксплуатации являются гравитационные свайные молоты (см., например [2, 3]), использующие в процессе погружения сваи энергию свободно падающей ударной массы.
Однако в большинстве известных технических решений погружения свай в грунт не предусмотрено свободного сброса ударной массы, отсутствует измерение и контроль энергии удара по свае.
В отличие от других известный способ, реализуемый устройством [2], позволяет изменять энергию удара гравитационным молотом путем сменяемой ударной массы (набора) грузов, закрепляемых на подвижной внешней к корпусу молота каретке. Смена (изменение) ударной массы в [2], как правило, трудоемка, поэтому затрудняет рациональное управление энергией удара забивки сваи и делает невозможным его оптимальность. Кроме того, изменение ударной массы, использованное в [2], может быть эквивалентно замещено управлением и контролем высоты свободного сброса груза постоянной массы.
За прототип принят способ [1] погружения сваи по патенту RU 2576417 С2, 10.03.2016, описание которого в части погружения сваи представляет наиболее общие существенные признаки технологии, адекватной [8] и многократно апробированной в разработанных ранее и запатентованных технических решениях [2-4, 9].
Известный способ погружения сваи [1] включает установку (наведение) сваи, ее ориентирование, фиксацию и забивку в грунт посредством свайного погружателя, выполненного в виде ударной массы, устанавливаемой в корпусе гравитационного молота грузоподъемной лебедкой с возможностью возвратно-поступательного перемещения внутри корпуса.
В способе [1] могут быть использованы простые в изготовлении и эксплуатации гравитационные молоты, однако при погружении сваи способом [1], как и при других известных технологиях их забивки в грунт, не предусмотрено управление энергией удара забивки сваи, а свободный сброс ударной массы не акцентирован.
Как показала практика строительных работ по возведению свайных фундаментов [9], адекватное управление и контроль энергией удара забивной массы могут быть осуществлены при использовании зависимости энергии удара от высоты сброса груза, т.е. при определении и фиксации значений высоты сброса известной ударной массы.
Сущность предлагаемого технического решения заключается в создании оптимально управляемого и контролируемого способа погружения сваи при свободном сбросе ударной массы.
Основной технический результат - оптимизация энергии удара забивки сваи в зависимости от вида (структуры) грунта и параметров (характеристик) забивной сваи. Способ осуществляет процесс погружения сваи посредством свободного сброса ударной массы, доступной и простой в изготовлении (как составных узлов, так и в целом), несложной и надежной в эксплуатации конструкции. Предложенный способ реализует близкий к оптимальному критерий «сложность - стоимость - эффективность (технический результат)», т.е. достижение максимально возможной технической эффективности (а также повышение производительности работ) при минимальных сложности и затратах.
Немаловажным достоинством способа является возможность забивки наклонных свай, что позволяет широко использовать его в практике возведения свайных фундаментов [9].
Технический результат достигается следующим образом.
Способ погружения сваи включает установку (наведение) сваи, ее ориентирование, фиксацию и забивку в грунт посредством свайного погружателя, выполненного в виде ударной массы, устанавливаемой в корпусе гравитационного молота грузоподъемной лебедкой с возможностью возвратно-поступательного перемещения внутри корпуса, причем в качестве свайного погружателя используют погружатель со свободно падающей ударной массой без сопровождения троса лебедки и с оптимально управляемой и контролируемой энергией Ei удара в каждом i-том цикле забивки в соответствии с выражением:

где m - ударная масса, т;
g - ускорение свободного падения, м/с2;
hi - высота свободного сброса ударной массы для удара в i-том цикле забивки, м.
При этом значения Ei задают в зависимости от вида (структуры) грунта и от расчетной несущей способности забиваемой сваи.
Отличием способа является то, что свободный сброс ударной массы и оптимальное управление энергией удара забивки сваи выполняют посредством захватного механизма ударной массы, соединенного с тросом лебедки и снабженного флажком-указателем ее высоты сброса, размещаемым с возможностью стопора в отверстиях перфорации корпуса молота. При этом перфорацию на корпусе молота выполняют по параллельной оси корпуса линии на отрезке длиной L с градацией N, определяемыми соотношениями:


где h0 и hmax - соответственно начальная и максимальная высота свободного сброса ударной массы. Контроль энергии удара проводят по положению флажка-указателя в отверстиях перфорации.
Погружение сваи осуществляют с вертикальной ориентацией сваи или с наклоном к вертикали до 5:1.
Изобретение поясняется чертежами:
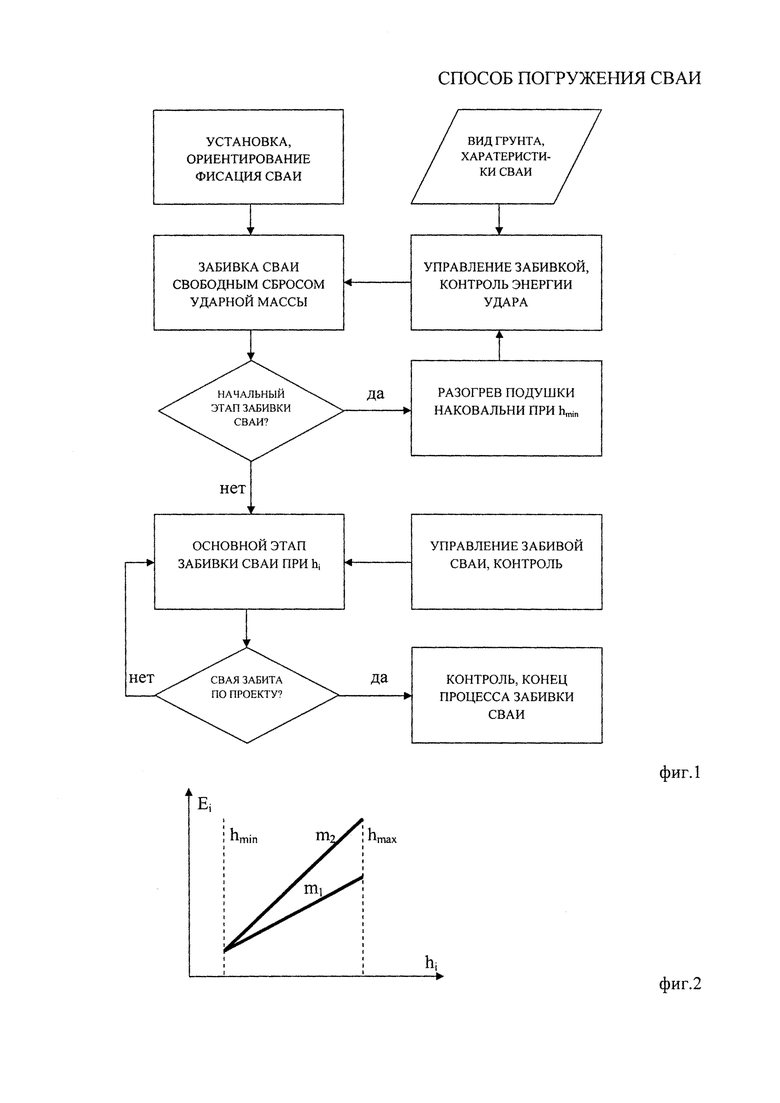
- на фиг. 1 представлена общая схема выполнения способа;
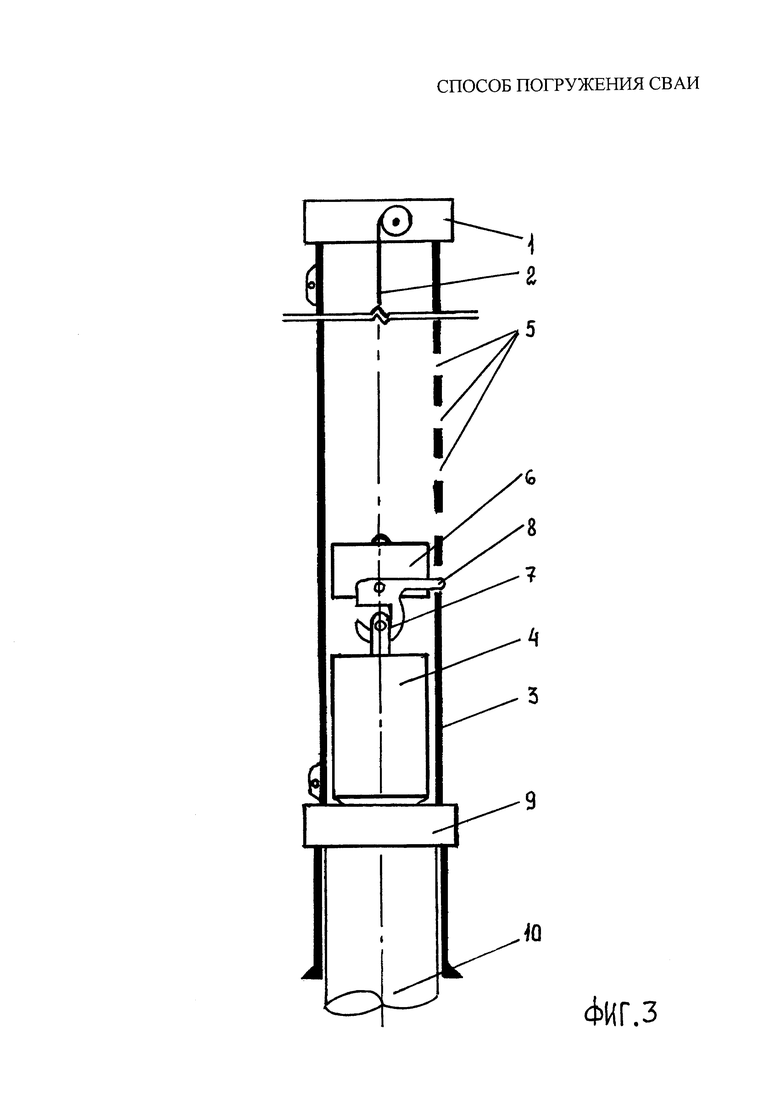
- на фиг. 2 (иллюстрирует получаемый при использовании предложенного способа технический результат) показана зависимость энергии удара по погружаемой свае при управлении и контроле в каждом i-том цикле забивки;
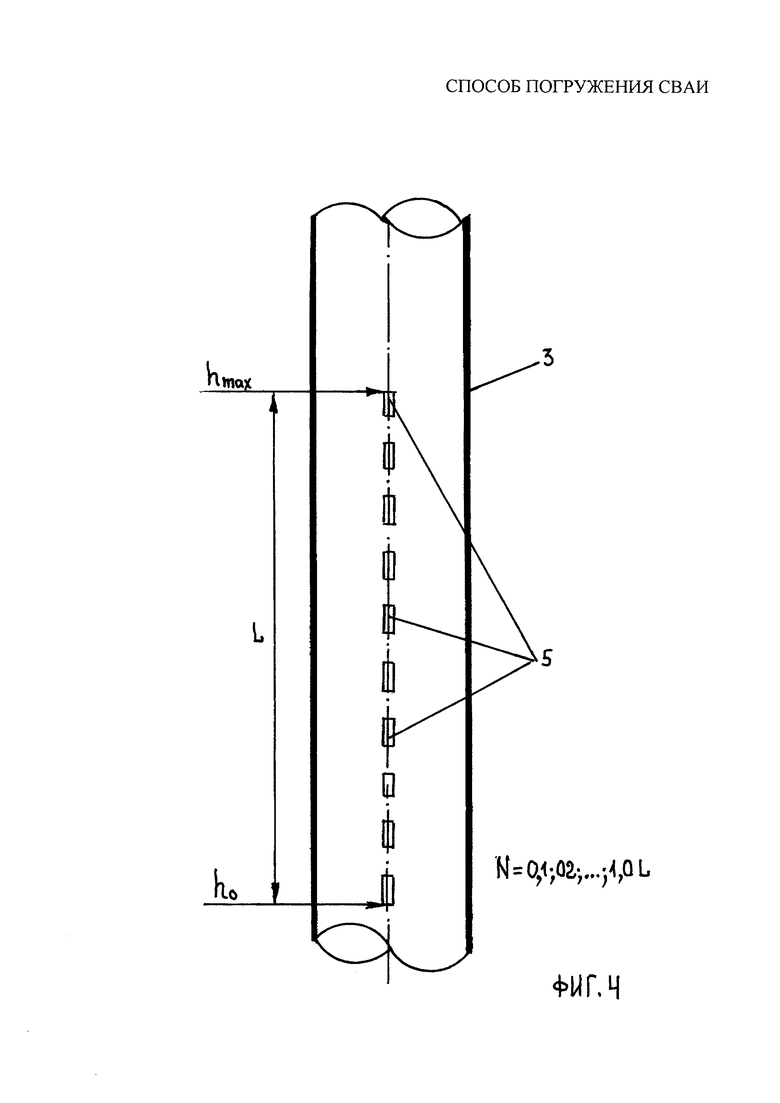
- на фиг. 3 приведена общая конструктивная схема, реализующая способ погружения сваи, где использованы следующие обозначения:
1 - грузоподъемная лебедка;
2 - трос лебедки;
3 - корпус гравитационного молота;
4 - ударная масса;
5 - перфорация на корпусе молота;
6 - захватный механизм;
7 - крюк захватного механизма;
8 - флажок-указатель;
9 - наковальня с демпферной подушкой;
10 - погружаемая свая;
- на фиг. 4 показан вариант схемы размещения перфорации на корпусе гравитационного молота.
Для погружения сваи используют гравитационный молот с простой кинематикой забивного процесса (свободный сброс груза с высоты), который снабжают схемой управления и контроля энергии удара забивки сваи и который превосходит по соотношению энергии удара и требуемой грузоподъемности лебеди к собственному весу известные типовые гидромолоты [7].
Способ погружения сваи при использовании гравитационного молота со свободно падающей ударной массой без сопровождения троса лебедки осуществляют следующим образом.
Процесс погружения сваи можно разделить на три основных этапа (фиг. 1). На первом этапе выполняют установку (наведение) сваи, ее ориентирование и фиксацию на месте забивки. Второй (предварительный) этап - этап забивки (фиг. 3) для нагрева демпферной подушки наковальни 9 (наголовника сваи 10) при ударах ударной массой 4 с небольшой высоты (от 0,5 до 1,0 м при N=0,1÷0,2 L). После этого выполняют третий, основной этап погружения сваи 10 путем ударов по свае свободно падающей ударной массой 4, устанавливая энергию Ei удара (фиг. 2) в зависимости от вида (структуры) грунта и от расчетной несущей способности забиваемой сваи 10 в соответствии с выражением (1).
В процессе погружения сваи 10 (фиг. 3) при подъеме лебедкой 1 захватного механизма 6 с ударной массой 4 срабатывает флажок-указатель 8 (отклоняется к оси корпуса 3) и последовательно пропускает участки перфорации 5 до заданного оператором значения градации N, определяемой соотношениями (2) и (3). При движении захватного механизма 6 вниз (лебедка 1 разматывает трос 2) флажок-указатель 8 попадает в заданное оператором отверстие перфорации 5 корпуса 3. Происходит проворачивание крюка 7 захватного механизма 6 вокруг своей оси, крюк 7 отклоняется от оси корпуса 3 и выходит из зацепления с ударной массой 4.
Таким образом, свободный сброс ударной массы 4 производят с заданной управляемой высоты, которая соответствует заданной энергии Ei удара (фиг. 2).
С помощью определяемой эмпирически рациональной градации N перфорации 5 корпуса 3 молота (фиг. 4) обеспечивают оптимальность управления энергией удара с дискретностью в соответствии с выражениями (2) и (3). Так, например, опытным путем было установлено, что для лебедки грузоподъемностью 20 т и ударной массы 18 т (гравитационный молот марки МГЭ-90/720) чистая энергия удара может быть управляема в диапазоне от 90 до 720 кДж.
Адекватное управление энергией удара по свае (фиг. 2) путем изменения высоты свободного сброса ударной массы может быть осуществлено, например, под контролем оператора с помощью трехпозиционного командоконтроллера с командами «вира», «майна», «стоп».
В зависимости от требований и условий монтажа сваю выполняют вертикальной или с наклоном до 5:1 к вертикали.
Проведенное практическое опробование способа (использован молот гравитационный электрический марки МГЭ-90/720, изготовленный в 2016 г.) подтвердило его достоинства и достигаемый технический результат по сравнению с зарубежными моделями [7]: соотношение энергии удара к собственному весу превосходило показатели зарубежных образцов более чем в 2 раза, а затраты на изготовление молота МГЭ составили около 30% от стоимости импортной техники.
Синергия простоты забивного процесса посредством свободного сброса ударной массы на сваю и конструкции молота, а также управления энергией удара наряду с оптимальным критерием «сложность - стоимость - эффективность» обеспечивает возможность широкого применения предложенного способа при возведении свайных фундаментов [9].
ИСТОЧНИКИ ПО ИНФОРМАЦИИ
1. RU 2576417 С2, 27.03.2016 (прототип).
2. RU 35539 U1, 20.01.2004 (аналог).
3. RU 17783 U1, 27.04.2001.
4. RU 2447226 С2, 10.04.2012.
5. RU 2059045 С1, 27.04.1996.
6. RU 2333316 С1, 10.09.2008.
7. а) Гидравлический молот JUNTTAN HHK / Руководство по эксплуатации. - Kuopio, Finland: Фирма Junttan Оу. - 2004.
б) Гидравлический молот IHC / Руководство по эксплуатации. - Kinderdijk, The Netherlands: фирма IHC Hydrohammer. - 2006.
8. Новый политехнический словарь / под ред. А.Ю. Ишлинского. - М.: Большая Российская энциклопедия, 2003, с. 472, с. 307.
9. www.specfundament.ru
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОГРУЖЕНИЯ СВАИ ПОВЫШЕННОЙ НЕСУЩЕЙ СПОСОБНОСТИ | 2014 |
|
RU2576417C2 |
| СПОСОБ ВОЗВЕДЕНИЯ РЕКРЕАЦИОННОГО КОМПЛЕКСА НАД МОРСКОЙ АКВАТОРИЕЙ У НЕИСПОЛЬЗУЕМЫХ ВЫСОКИХ АБРАЗИОННЫХ БЕРЕГОВ, ЛИШЕННЫХ ПЛЯЖНЫХ ТЕРРИТОРИЙ | 2011 |
|
RU2474649C2 |
| ГИДРАВЛИЧЕСКИЙ МОЛОТ ДЛЯ ПОГРУЖЕНИЯ СВАЙ | 2007 |
|
RU2347037C2 |
| ТРУБОБЕТОННАЯ СВАЯ С УСИЛЕННЫМ ОСНОВАНИЕМ И СПОСОБ ЕЕ СООРУЖЕНИЯ | 2011 |
|
RU2492294C1 |
| СПОСОБ ЗАБИВКИ СВАИ В ГРУНТ | 2013 |
|
RU2555848C1 |
| Устройство для определения перемещения сваи при ее забивке | 1978 |
|
SU775230A1 |
| СПОСОБ СООРУЖЕНИЯ ТОННЕЛЬНОГО ТРАНСПОРТНОГО ПЕРЕХОДА | 2015 |
|
RU2586345C2 |
| СВАЙНЫЙ КОПЕР | 2014 |
|
RU2566168C1 |
| СПОСОБ МОНТАЖА НАВЕСНОГО ОБОРУДОВАНИЯ БУРИЛЬНО-СВАЕБОЙНОЙ МАШИНЫ "БЕРКУТ" | 2001 |
|
RU2196203C1 |
| СПОСОБ УСТРОЙСТВА СВАИ В ПРОБИТОЙ СКВАЖИНЕ (ВАРИАНТЫ) | 2017 |
|
RU2663420C1 |
Изобретение относится к технологии погружения в грунт забивных свай из металлических труб-оболочек при строительных работах. Способ погружения сваи включает установку (наведение) сваи, ее ориентирование, фиксацию и забивку в грунт посредством свайного погружателя. Погружатель выполнен в виде ударной массы, устанавливаемой в корпусе гравитационного молота грузоподъемной лебедкой с возможностью возвратно-поступательного перемещения внутри корпуса. В качестве свайного погружателя используют погружатель со свободно падающей ударной массой без сопровождения троса лебедки и с оптимально управляемой и контролируемой энергией Ei удара в каждом i-том цикле забивки в соответствии с выражением: Ei=mghi, кДж, где m - ударная масса, т; g - ускорение свободного падения, м/с2; hi - высота свободного сброса ударной массы для удара в i-том цикле забивки, м.
Значения Ei задают в зависимости от вида (структуры) грунта и от расчетной несущей способности забиваемой сваи. Свободный сброс ударной массы и оптимальное управление энергией удара забивки сваи выполняют посредством захватного механизма ударной массы, соединенного с тросом лебедки и снабженного флажком-указателем ее высоты сброса, размещаемым с возможностью стопора в отверстиях перфорации корпуса молота. Перфорацию на корпусе молота выполняют по параллельной оси корпуса линии на отрезке длиной L с градацией N, определяемыми соотношениями: h0<L<hmax, N=0,1; 0,2 … 1,0L, где h0 и hmax - соответственно начальная и максимальная высота свободного сброса ударной массы. Контроль энергии удара проводят по положению флажка-указателя в отверстиях перфорации. Технический результат - повышение производительности работ. 4 ил.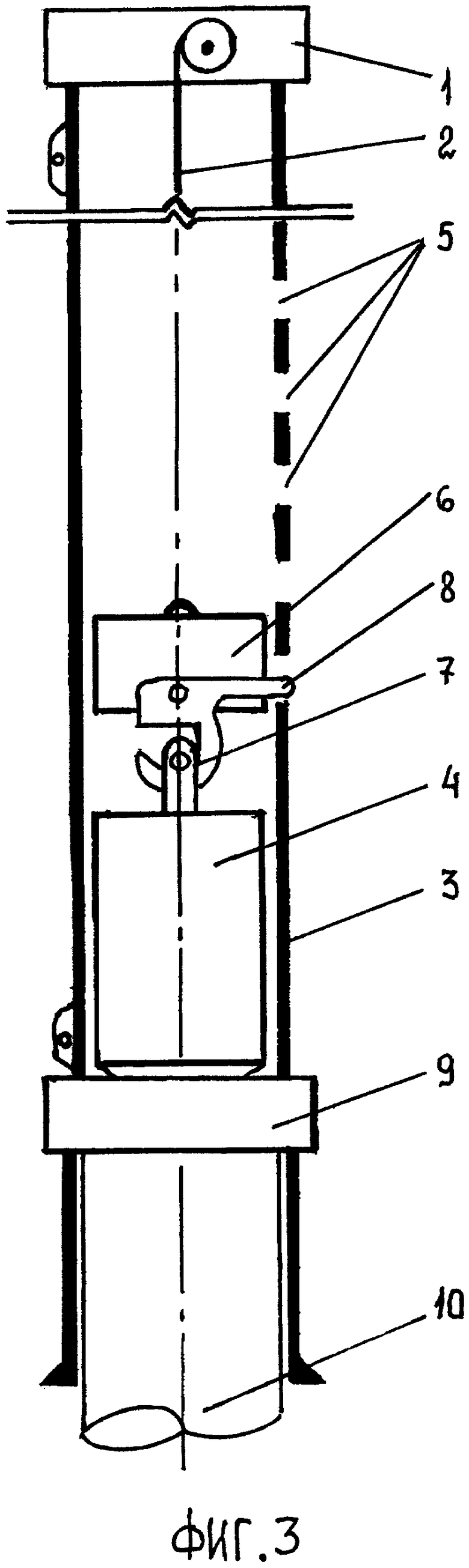
Способ погружения сваи, включающий установку (наведение) сваи, ее ориентирование, фиксацию и забивку в грунт посредством свайного погружателя, выполненного в виде ударной массы, устанавливаемой в корпусе гравитационного молота грузоподъемной лебедкой с возможностью возвратно-поступательного перемещения внутри корпуса, причем в качестве свайного погружателя используют погружатель со свободно падающей ударной массой без сопровождения троса лебедки и с оптимально управляемой и контролируемой энергией Ei удара в каждом i-том цикле забивки в соответствии с выражением:
Ei=mghi, кДж,
где m - ударная масса, т;
g - ускорение свободного падения, м/с2;
hi - высота свободного сброса ударной массы для удара в i-том цикле забивки, м,
а значения Ei задают в зависимости от вида (структуры) грунта и от расчетной несущей способности забиваемой сваи, отличающийся тем, что свободный сброс ударной массы и оптимальное управление энергией удара забивки сваи выполняют посредством захватного механизма ударной массы, соединенного с тросом лебедки и снабженного флажком-указателем ее высоты сброса, размещаемым с возможностью стопора в отверстиях перфорации корпуса молота, при этом перфорацию на корпусе молота выполняют по параллельной оси корпуса линии на отрезке длиной L с градацией N, определяемыми соотношениями:
h0<L<hmax,
N=0,1; 0,2 … 1,0L,
где h0 и hmax - соответственно начальная и максимальная высота свободного сброса ударной массы,
а контроль энергии удара проводят по положению флажка-указателя в отверстиях перфорации.
| СПОСОБ ПОГРУЖЕНИЯ СВАИ ПОВЫШЕННОЙ НЕСУЩЕЙ СПОСОБНОСТИ | 2014 |
|
RU2576417C2 |
| Способ получения жидких сульфокислот | 1951 |
|
SU99023A1 |
| Устройство для уплотнения грунта | 1985 |
|
SU1323657A1 |
| Сменное ударное оборудование | 1985 |
|
SU1303669A1 |
| Установка для вытрамбовывания котлованов | 1987 |
|
SU1442611A1 |
| US 4187917 A, 12.02.1980 | |||
| Вибромолот | 1986 |
|
SU1318659A2 |

