Изобретение огиоситсч к грузозахватным устройствам.
Дель изобретения -- упрощение конструкции.
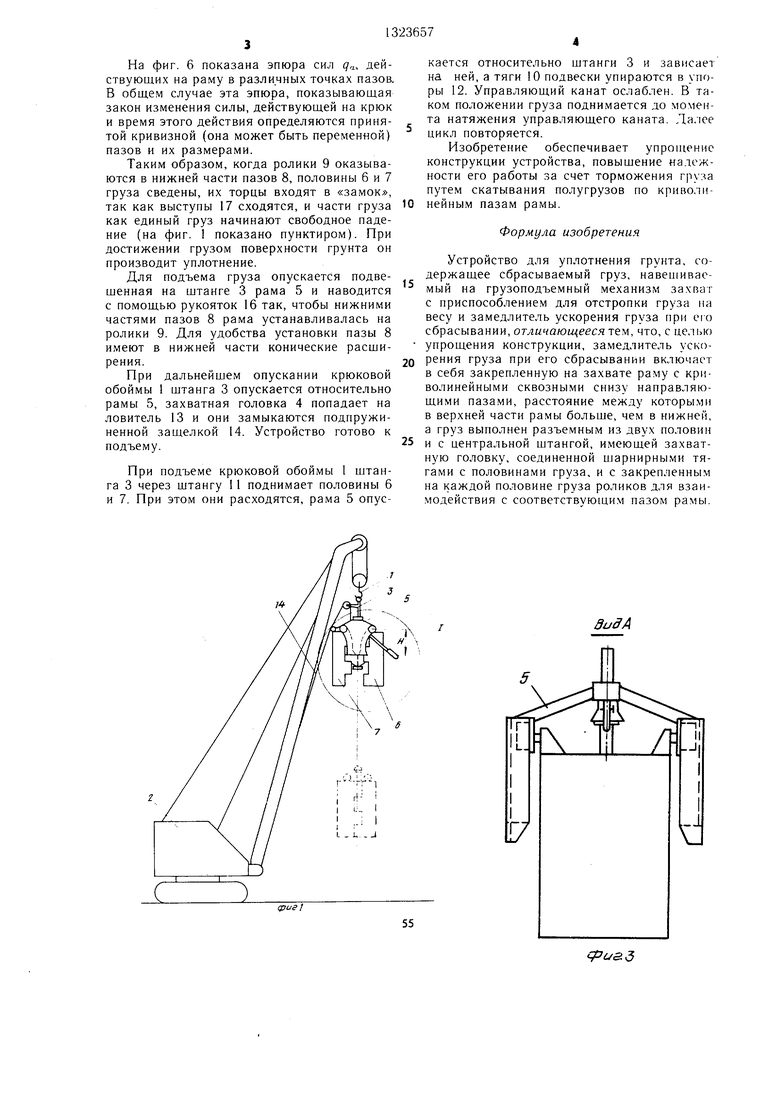
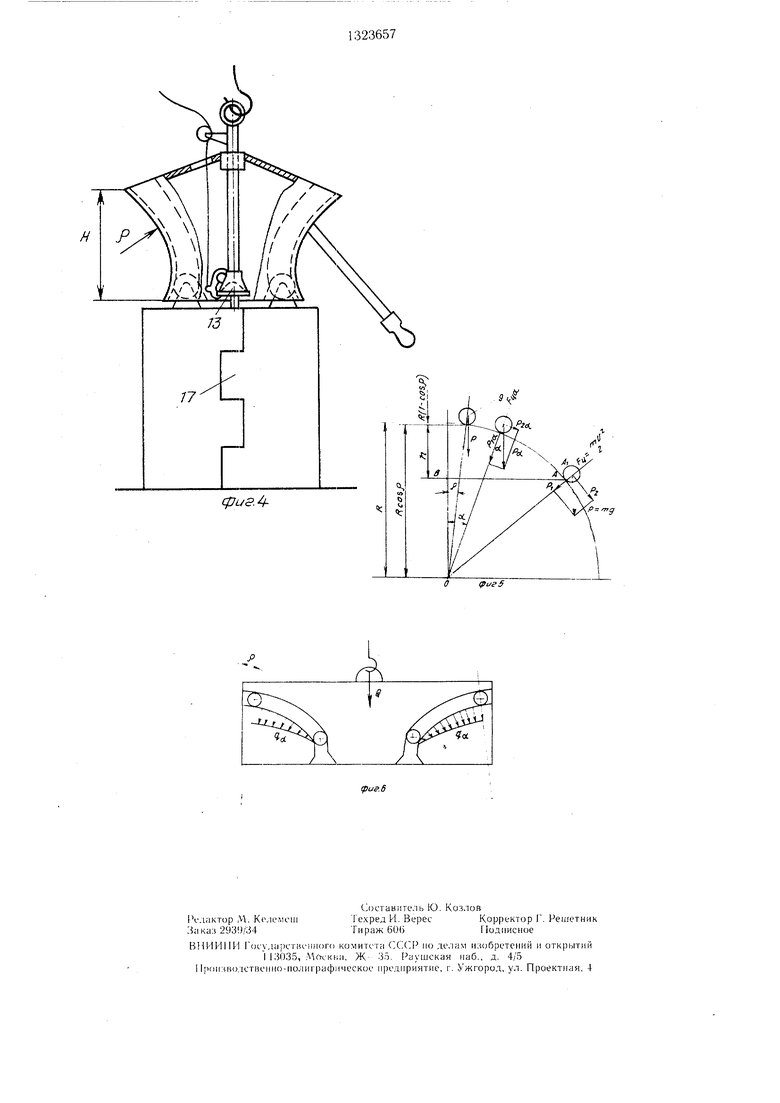
На фиг. 1 показана система устройства, общий вид; па фиг. 2 - узел I на фиг. I (устройство в исходном положении); на фиг. 3 - вид А на фиг. 2; на фиг. 4 - за- .хватное устройство, момент состыковки с грузо.м; на фиг. 5 -- схема сил, действующих на груз; па фиг. 6 схема сил, действующих на раму.
Система состоит из захватного устройства, включющего в себя подвешенную к крюковой обойме 1 стрелового крана 2, штангу 3 с захватной головкой 4 на конце. К штанге 3 подвешена рама 5, являющаяся направляю- н|им элементом для груза, состоящего из двух половин 6 и 7. Рама 5 имеет криволинейные пазы 8, в которых расположены ролики 9,закрепленные на половинах 6 и 7 груза, соединенных между собой параллелограм- мной подвеской, состоящей из тяг 10 и центральной штанги 11, оборудованной упорами 12. Расстояние между пазами в верхней части рамы больше расстояния между ними в нижней ее части. В верхней части штанги 11 установлен конический ловитель 13. На захватной головке 4 установлена подпружиненная заш,елка 14 (пружина условно не показана), связанная с управляюп им канатом 15, закрепленным на стреле крана. На раме 5 закреплены рукоятки 16 для удобства ее наводки на груз. На торцах половин 6 и 7 груза выполнен замок в виде взаимодействующих друг с другом выступов 17.
Устройство работает следующим образом.
Ноловины 6 и 7 при подъеме (на фиг. 2 показано пунктиром) посредством штанги И параллелограммной подвески висят на нпан- ге 3. При этом подпружиненная занхелка 14 замыкает захватную головку 4 и конический ловитель 13; управляющий канат ослаблен. Ролики 9 располагаются в верхней части пазов 8 рамы 5, висящей на штанге 3.
В таком состоянии (половины 6 и 7 груза разведены) устройство поднимается краном. При достижении определенной, заранее рассчитанной высоты управляющий канат 15, один конец которого закреплен на стреле крана, натягивается и отводит подпружи- ненную защелку 14. Происходит расстыковка штанги 3 со штангой 1 1 подвески, и груз начинает падать.
При этом ролики 9 движутся в криволинейных пазах В. Половины 6 и 7 груза опускаются вниз и одновременно сближаются в поперечном направлении. На раму 5 груз воздействует с переменной силой. Когда ролики 9 находя.тся в верхней части рамы, эта сила равна Q - весу груза. Когда ролики 9 находятся в нижней части пазов рамы, указанная сила равна нулю, т. е. сила, действующая на крюк крана, меняется от Q до нуля за время движения роликов по пазам
рамы 5. Время движения и закон изменения силы, действующей на крюк крана, зависит от конфигурации пазов 8 рамы 5.
Рассмотрим это условие на примере выполнения пазов с постоянным радиусом R (фиг. 5). Так как половины 6 и 7 груза связаны между собой параллелограммной подвеской, то на каждый ролик 9 действует вес одной части груза, например 7, , где т - масса одной части груза. В верхнем положении ролики расположены под углом трения р по криволинейной поверхности. Тогда при расстыковке грузы смогут начать свободное падение под действием собственного веса. В этом случае центр тяжести одной части груза совершает движение по криволинейной траектории с радиусом кривизны / и в центре тяжести приложены сила веса одной части груза Р и центробежная сила F,,. Перенесем эти силы в центр роликов 9. При этом возникающие моменты вращения от сил Р и / ц взаимопогащаются на параллелограммной подвеске и на ролики действуют только силы Р и F,,.
Рассмотри.м эти силы в произвольный момент времени, определяемый углом а (фиг. 5). Здесь P,mgcosa, P2a wgsina.
с
на
mV,
. Сила, действующая на раму, равна qn. , сила, разгоняющая половину груза, - Я9л(. Сила, действующая на крюк через раму, равна Qa 2PiaCosa.
По мере скатывания груза увеличивается и уменьщается Я|,,. Давление грузов на раму станет равным нулю, когда ...j. В этот момент ролики выходят из пазов, оба полугруза сходятся, и начинается свободное вертикальное падение. Например, по принятой схеме (если пренебречь силами трения) момент, когда ,,,, соответствует высоте
L//l COSf).
Докажем это. Из равенства кинетической и потенциальной энергий имеем
(1 )
Из подобия треугольников АОВ и .Л|РР| р,/р- cospj-/j
Hl/F- ,
откуда Pi mg(Rcos.() - h)/R. (2) С другой стороны
p,.f )
R R
а с учетом фор.мул (2) и (3) находим:
) R Rп
()3/i; / %-cosn.
На фиг. 6 показана эпюра сил (/а, действующих на раму в различных точках пазов. В общем случае эта эпюра, показывающая закон изменения силы, действующей на крюк и время этого действия определяются принятой кривизной (она может быть переменной) пазов и их размерами.
Таким образом, когда ролики 9 оказываются в нижней части пазов 8, половины 6 и 7 груза сведены, их торцы входят в «замок, так как выступы 17 сходятся, и части груза как единый груз начинают свободное падение (на фиг. 1 показано пунктиром). При достижении грузом поверхности грунта он производит уплотнение.
Для подъема груза опускается подве- щенная на щтанге 3 рама 5 и наводится с помощью рукояток 16 так, чтобы нижними частями пазов 8 рама устанавливалась на ролики 9. Для удобства установки пазы 8 имеют в нижней части конические расщи- рения.
При дальнейшем опускании крюковой обоймы 1 щтанга 3 опускается относительно рамы 5, захватная головка 4 попадает на ловитель 13 и они замыкаются подпружиненной защелкой 14. Устройство готово к подъему.
При подъеме крюковой обоймы 1 щтанга 3 через щтангу 11 поднимает половины 6 и 7. При этом они расходятся, рама 5 опус
кается относительно щтанги 3 и зависает на ней, а тяги 10 подвески упираются в упоры 12. Управляющий канат ослаблен. В таком положении груза поднимается до момента натяжения управляющего каната. Далее цикл повторяется.
Изобретение обеспечивает упрощение конструкции устройства, повыщение надежности его работы за счет торможения груза путем скатывания полугрузов по криволинейным пазам рамы.
Формула изобретения
Устройство для уплотнения грунта, содержащее сбрасываемый груз, навешиваемый на грузоподъемный механизм захват с приспособлением для отстропки груза на весу и замедлитель ускорения груза при его сбрасывании, отличающееся тем, что, с целью упрощения конструкции, замедлитель ускорения груза при его сбрасывании включает в себя закрепленную на захвате раму с криволинейными сквозными снизу направляющими пазами, расстояние между которыми в верхней части рамы больше, чем в нижней, а груз выполнен разъемным из двух половин и с центральной щтангой, имеющей захватную головку, соединенной шарнирными тягами с половинами груза, и с закрепленным на каждой половине груза роликов для взаимодействия с соответствующим пазом рамы.
/«
gyuel
55
Cp(J3.d
оif иг 5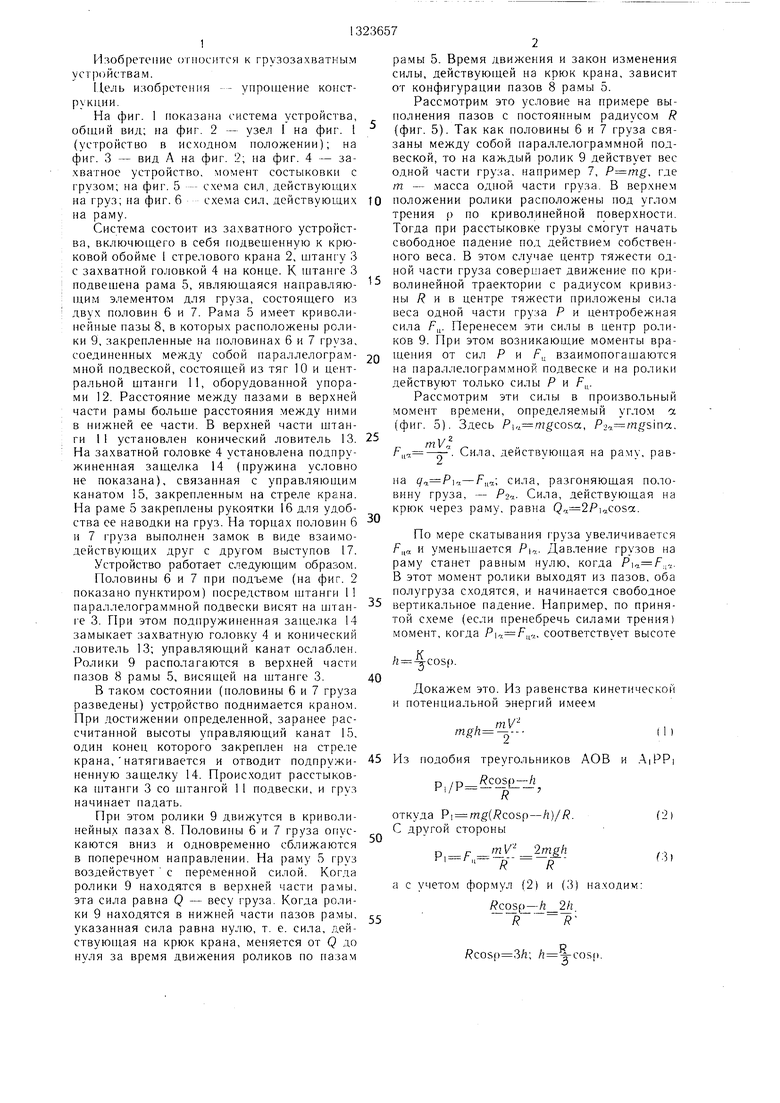
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| УСТРОЙСТВО для ПОДЪЕМА И БАЛАНСИРОВКИ ГРУЗА | 1973 |
|
SU404757A1 |
| Мостовой кран | 1990 |
|
SU1794869A1 |
| Захват-кантователь тяжеловесных изделий | 1976 |
|
SU602465A1 |
| Захватная балка для подъема и опускания шандоров в гидротехнических сооружениях | 1936 |
|
SU57028A1 |
| Машина для транспортирования и вертикальной саморазгрузки и самопогрузки емкости | 2022 |
|
RU2789920C1 |
| Трубоукладчик | 1982 |
|
SU1147681A1 |
| Крюковая подвеска | 1985 |
|
SU1252283A2 |
| Устройство для динамического уплотнения грунтов | 1989 |
|
SU1659588A1 |
| Устройство для уплотнения грунта | 1989 |
|
SU1659587A1 |
Изобретение относится к подъемно- транспортному оборудованию, в частности к устройствам для уплотнения грунта. Целью изобретения является упрощение конструкции. Устройство для уплотнения грунта содержит сбрасываемый груз, выполненный разъемным из двух половин 6 и 7 и с центральной штангой 11. Центральная штанга 1 I имеет захватную головку 4 и соединена тягами 10 с половинами 6 и 7 груза, на которых закреплены ролики 9, расположенные в пазу 8 рамы 5, которая входит в состав замедлителя ускорения груза при его сбрасывании 6 ил. 50) 16 СА: к: о: СУ: ел г
Р
| Электрогидравлический усилитель | 1988 |
|
SU1566101A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
