Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству формирования целевого маршрута и устройству управления приведением в движение. Более конкретно, настоящее изобретение относится к устройству формирования целевого маршрута, которое формирует целевой маршрут для управления приведением в движение транспортного средства, и устройству управления приведением в движение, которое содержит устройство формирования целевого маршрута.
Уровень техники
[0002] Делаются попытки разработать устройство автономного управления приведением в движение, которое способно автономно управлять транспортным средством от пункта отправления до пункта назначения (например, ссылка на патентный документ 1). В этом типе устройства автономного управления приведением в движение, например, путь движения транспортного средства от пункта отправления до пункта назначения вычисляется с помощью хорошо известной навигационной технологии, и полосы движения и препятствия на пути движения обнаруживаются с помощью технологии обнаружения, такой как радиолокационный датчик, датчик изображения и т.д. Устройство автономного управления приведением в движение инструктирует транспортному средству двигаться автономно по пути движения на основе обнаруженной информации.
Документы предшествующего уровня техники
Патентные документы
[0003] [Патентный документ 1] Выложенная японская патентная заявка № 2011-240816
Сущность изобретения
Цель изобретения
[0004] В устройстве автономного управления приведением в движение, когда присутствие препятствия обнаруживается впереди транспортного средства, требуется управление приведением в движение для объезда препятствия. Однако, если резкое изменение выполняется в движении транспортного средства для того, чтобы объезжать препятствие, в поведении транспортного средства будет возникать неожиданное изменение для пользователя, и пользователь будет чувствовать дискомфорт от езды.
Для того, чтобы решать проблему, описанную выше, целью настоящего изобретения является предоставление устройства формирования целевого маршрута, которое сдерживает дискомфорт, возникающий у пользователя, даже при обнаружении препятствия.
Средство достижения цели
[0005] Устройство формирования целевого маршрута в качестве одного варианта осуществления настоящего изобретения содержит блок получения картографической информации, блок определения пути с изгибом, блок определения препятствия и блок формирования целевого маршрута. Блок получения картографической информации получает картографическую информацию. Блок определения пути с изгибом определяет, присутствует или нет путь с изгибом на маршруте приведения в движение транспортного средства, на основе картографической информации. При определении, что путь с изгибом присутствует, блок определения препятствия определяет, присутствует или нет объект, который необходимо объезжать, вблизи пути с изгибом. При определении, что объект, который необходимо объезжать, присутствует, блок формирования целевого маршрута формирует целевой маршрут для транспортного средства, который избегает предварительно определенной области, включающей в себя объект, который необходимо объезжать.
Результат изобретения
[0006] Согласно целевому маршруту настоящего изобретения, представляется возможным предоставлять устройство формирования целевого маршрута, которое пресекает дискомфорт, возникающий у пользователя, даже при обнаружении объекта, который необходимо объезжать, в окрестностях пути с изгибом.
Краткое описание чертежей
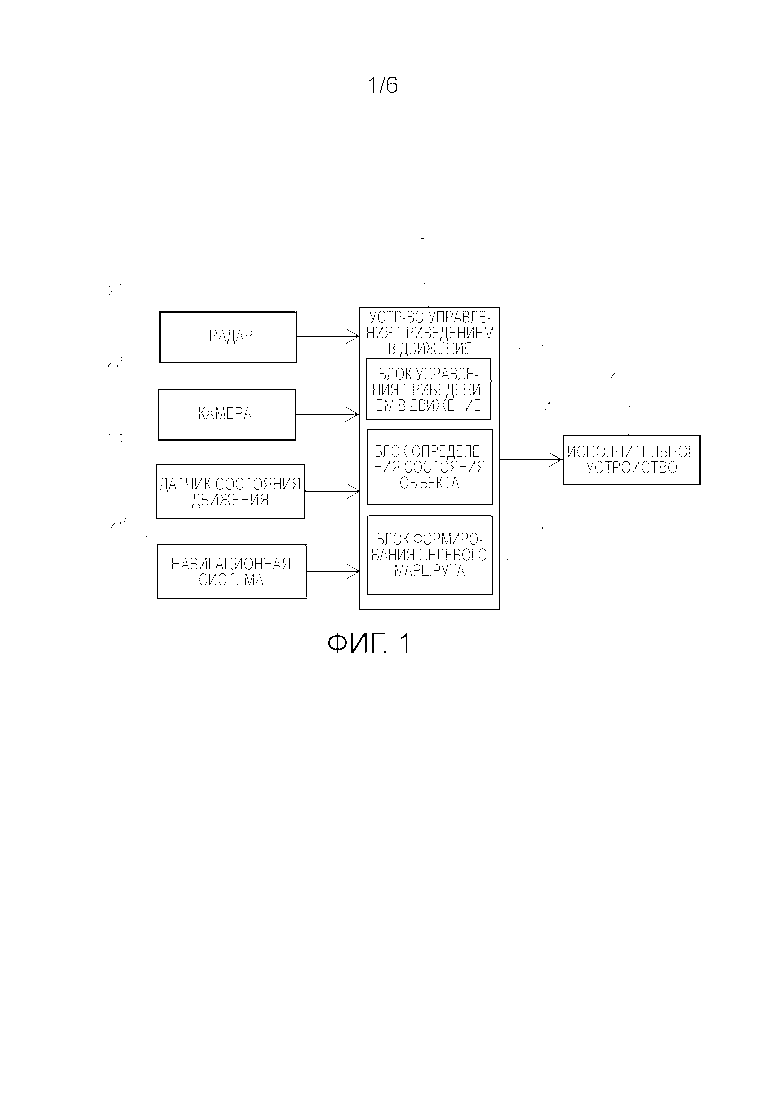
[0007] Фиг. 1 - это блок-схема, иллюстрирующая конфигурацию устройства управления приведением в движение согласно первому варианту осуществления.
Фиг. 2 - это блок-схема, иллюстрирующая конфигурацию блока формирования целевого маршрута согласно первому варианту осуществления.
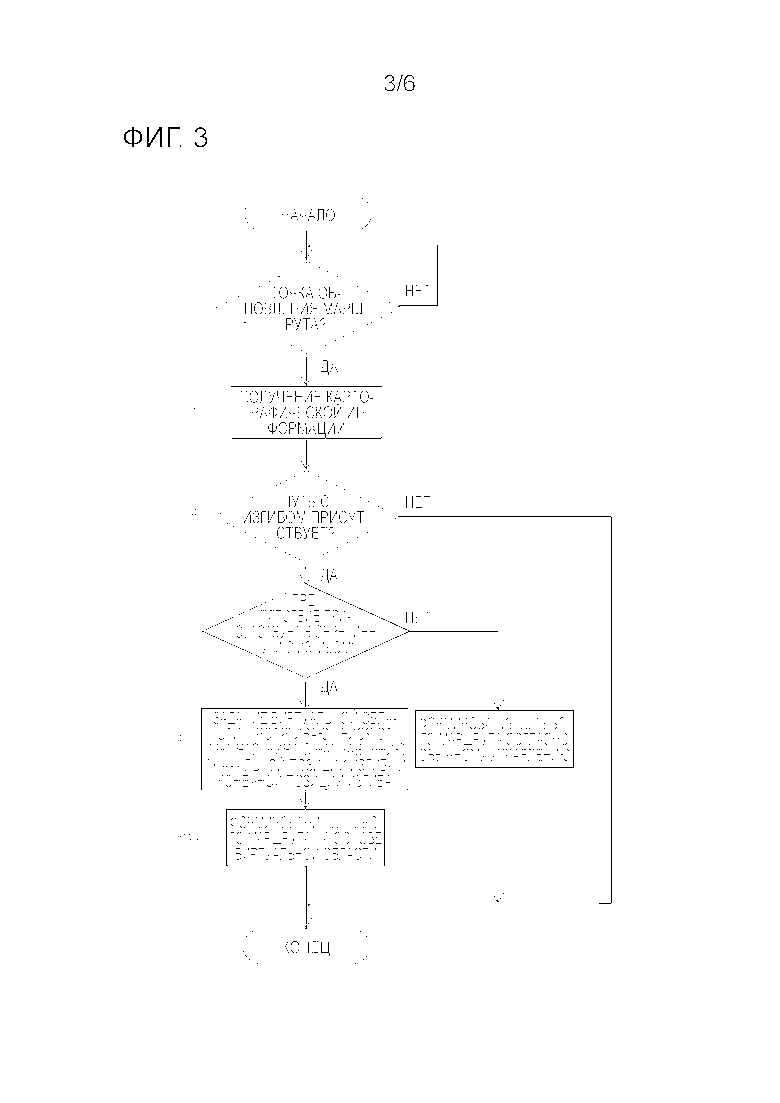
Фиг. 3 - это блок-схема последовательности операций, иллюстрирующая процесс формирования целевого маршрута для пути с изгибом согласно первому варианту осуществления.
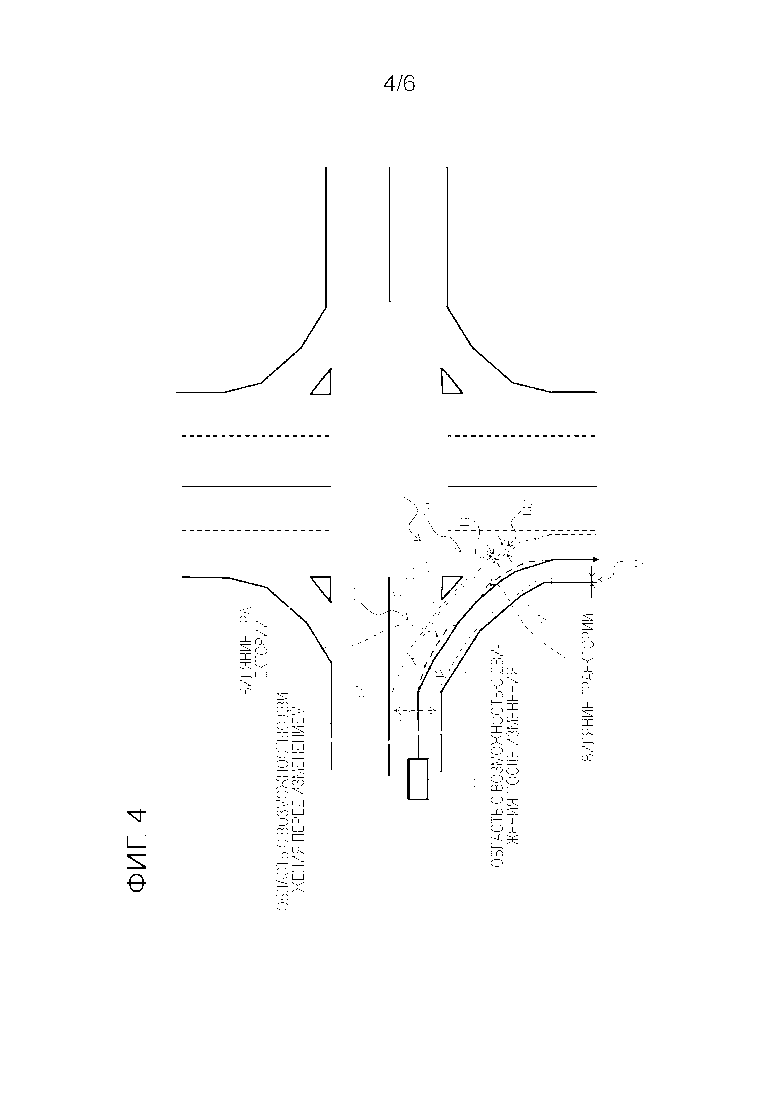
Фиг. 4 - это схематичный вид, иллюстрирующий конфигурацию дороги с путем с изгибом и целевую траекторию транспортного средства согласно первому варианту осуществления.
Фиг. 5 - это блок-схема последовательности операций, иллюстрирующая процесс формирования целевого маршрута для пути с изгибом согласно второму варианту осуществления.
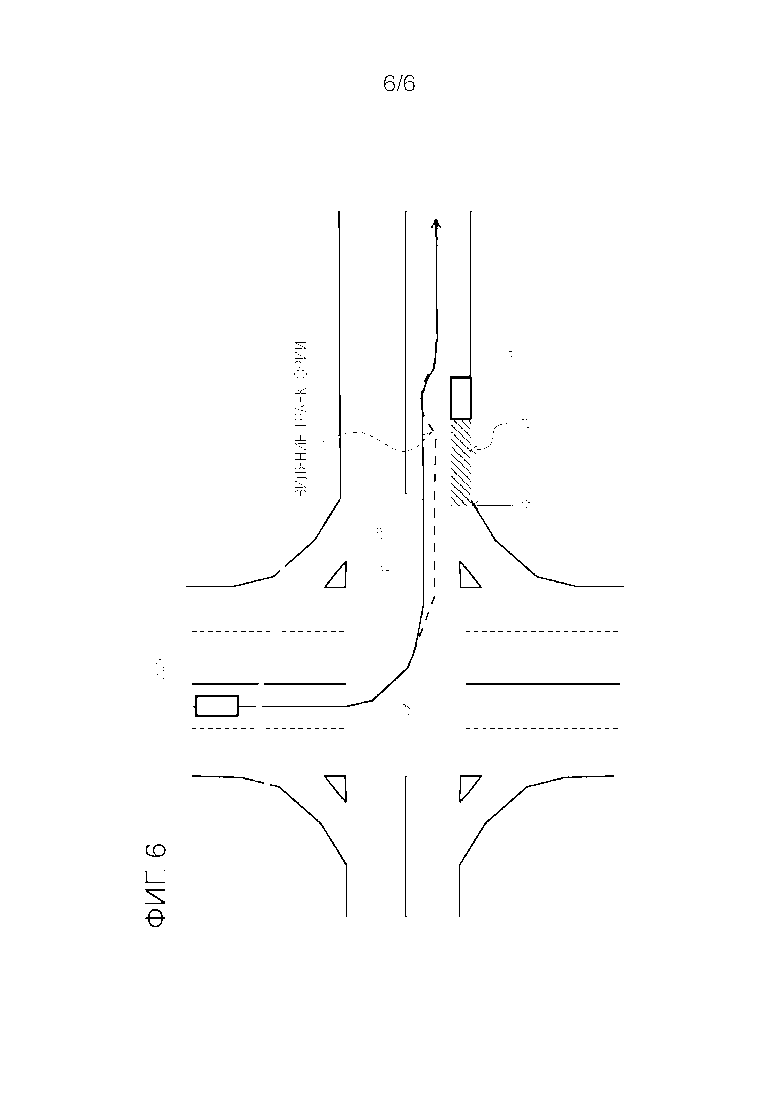
Фиг. 6 - это схематичный вид, иллюстрирующий конфигурацию дороги с путем с изгибом и целевую траекторию транспортного средства согласно второму варианту осуществления.
Варианты осуществления для выполнения изобретения
[0008] Варианты осуществления настоящего изобретения будут описаны ниже на основе вариантов осуществления, иллюстрированных на чертежах.
1. Первый вариант осуществления
[0009] Конфигурация устройства 10 управления приведением в движение согласно первому варианту осуществления будет описана со ссылкой на фиг. 1. Фиг. 1 - это блок-схема, иллюстрирующая конфигурацию устройства управления приведением в движение согласно первому варианту осуществления. Устройство 10 управления приведением в движение - это устройство, установленное в транспортном средстве, и устройство, которое управляет автоматическим приведением в движение транспортного средства.
[0010] Радар 20, камера 22, датчик 24 состояния движения, навигационная система 26, исполнительное устройство 28 и т.п. электрически соединяются с устройством 10 управления приведением в движение, как иллюстрировано на фиг. 1. Устройство 10 управления приведением в движение может быть соответственно соединено с другими хорошо известными конфигурациями, такими как блок связи, для выполнения связи между транспортными средствами.
[0011] Радар 20 обнаруживает присутствие, позицию и скорость, также как относительную скорость относительно рассматриваемого транспортного средства, для транспортного средства, мотоцикла, велосипеда, пешехода и т.п., окружающих рассматриваемое транспортное средство. Радар 20 содержит, например, лазерный радар, радар миллиметрового диапазона или т.п. Кроме того, радар 20 выводит обнаруженные данные в устройство 10 управления приведением в движение. Поскольку хорошо известный радар может быть соответствующим образом использован в качестве радара 20, подробное описание конфигурации будет опущено.
[0012] Камера 22, например, прикрепляется к переду или боку рассматриваемого транспортного средства и захватывает изображение окружения рассматриваемого транспортного средства. Например, камера 22 захватывает полосы участка дороги и препятствия по курсу. Камера 22 содержит элемент формирования изображения, такой как CCD (устройство с зарядовой связью) или CMOS (комплементарный металло-оксидный полупроводник). Камера 22 выводит сигналы захваченного изображения в устройство 10 управления приведением в движение. Поскольку хорошо известная камера может быть соответствующим образом использована в качестве камеры 18, подробное описание конфигурации будет опущено.
[0013] Датчик 24 состояния движения определяет состояние движения (например, скорость транспортного средства, ускорение, угол поворота вокруг вертикальной оси и т.д.) рассматриваемого транспортного средства. Датчик 24 состояния движения имеет, например, датчик скорости колеса, предусмотренный для каждого колеса рассматриваемого транспортного средства, и определяет состояние движения рассматриваемого транспортного средства, такое как скорость транспортного средства, измеряя скорость колеса. Датчик 24 состояния движения выводит обнаруженное состояние движения рассматриваемого транспортного средства в устройство 10 управления приведением в движение. Поскольку хорошо известный датчик скорости транспортного средства, датчик ускорения и датчик угла поворота вокруг вертикальной оси, и т.д., могут быть использованы в качестве датчика 24 состояния движения, подробное описание конфигурации будет опущено.
[0014] Навигационная система 26 принимает GPS-сигналы от GPS (системы глобального позиционирования) спутника. Кроме того, навигационная система 26 может содержать гироскоп, который определяет величину вращательного движения, применяемого к транспортному средству, датчик ускорения, который определяет расстояние перемещения транспортного средства из ускорения в трех осевых направлениях, и т.п., и геомагнитный датчик, который определяет направление движения транспортного средства из геомагнетизма или т.п. Навигационная система 26 хранит картографическую информацию, которая сохраняется на носителе хранения информации большой емкости, таком как CD-ROM (постоянное запоминающее устройство на компакт-диске), DVD-ROM (цифровой универсальный диск) или HDD (накопитель на жестком диске). Картографическая информация включает в себя, например, информацию о числе полос; информацию для указания поверхности дороги, такую как разделительные линии полос движения, внешние линии дороги, которые присутствуют с обеих сторон дороги, центральные линии полос движения для множества полос, стоп-линии, пешеходные переходы и метки на поверхности дороги; и информацию о форме дороги, такую как кривизна и ширина дороги для дорог. Кроме того, картографическая информация включает в себя информацию об области с возможностью движения, которая задается заранее согласно форме дороги, и которая указывает диапазон возможности движения транспортного средства, и информацию о препятствии, такую как дорожные ограждения, стены, бордюры и здания. Кроме того, картографическая информация включает в себя информацию об обычных дорогах и скоростных автомагистралях; информацию о перекрестках, такую как место и форма перекрестков; информацию об отличительных признаках, такую как сигналы и знаки; и информацию о состоянии дороги, такую как зоны парковки, затор, строительство дороги и перекрытие полосы движения. Навигационная система 26 обнаруживает позицию транспортного средства и ориентацию относительно дороги на основе картографической информации и GPS-сигналов от GPS-спутника. Навигационная система 26 отыскивает курс (маршрут) от пункта отправления до пункта назначения, согласно входным данным о пункте отправления (или текущей позиции) и пункте назначения, и выполняет направление по маршруту до пункта назначения, с помощью найденного курса и позиционной информации рассматриваемого транспортного средства. Навигационная система 26 выводит найденный курс до пункта назначения, включенного в картографическую информацию, в устройство 10 управления приведением в движение. Поскольку хорошо известная навигационная система может быть соответствующим образом использована в качестве навигационной системы 26, подробное описание конфигурации будет опущено.
[0015] Исполнительное устройство 28 включает в себя исполнительное устройство рулевого управления, которое является электрическим исполнительным устройством, которое прикладывает вспомогательный крутящий момент к рулевому колесу. Посредством исполнительного устройства рулевого управления, управляемого посредством устройства 10 управления приведением в движение, произвольный угол поворота применяется к углу вращения для руления, т.е., к колесам, для того, чтобы выполнять операцию руления транспортным средством. В дополнение к исполнительному устройству рулевого управления исполнительное устройство 28 включает в себя исполнительное устройство тормоза для выполнения операции торможения рассматриваемого транспортного средства, формируя тормозное усилие на колесах, и исполнительное устройство педали акселератора, который прикладывает силу реакции педали к педали акселератора. Поскольку хорошо известное исполнительное устройство может быть использовано в качестве исполнительного устройства 28, подробное описание конфигурации будет опущено.
[0016] Устройство 10 управления приведением в движение является компьютером, который включает в себя, например, ROM (постоянное запоминающее устройство), в котором хранится программа для управления движущей силой рассматриваемого транспортного средства; CPU (центральный процессор) в качестве операционной схемы, которая функционирует в качестве устройства 10 управления приведением в движение, выполняя программу, которая хранится в ROM; RAM (оперативное запоминающее устройство), которое функционирует как запоминающее устройство с возможностью доступа; и средство хранения, такое как жесткий диск.
[0017] Устройство 10 управления содержит блок 12 управления приводом, блок 14 определения состояния объекта и блок 16 формирования целевого маршрута в качестве устройства формирования целевого маршрута.
[0018] Блок 12 управления приведением в движение выполняет управление приводом (управление приведением в движение) рассматриваемого транспортного средства, управляя исполнительным устройством 28 на основе целевого маршрута, сформированного посредством блока 16 формирования целевого маршрута, описанного позже. В частности, блок 12 управления приводом получает величины управления для двигателя, тормоза и рулевого управления, необходимые, чтобы следовать целевому маршруту, сформированному посредством блока 16 формирования целевого маршрута, и выводит эти величины управления исполнительному устройству 28.
[0019] Блок 14 определения состояния объекта определяет позицию объекта, присутствующего в окружающей обстановке рассматриваемого транспортного средства, и скорость движущегося тела на основе данных от радара 20. Кроме того, блок 14 определения состояния объекта содержит процессор изображения и выполняет предварительно определенную обработку изображения относительно сигналов изображения, захваченных камерой 22, чтобы определять дорожные условия, окружающие рассматриваемое транспортное средство.
[0020] Блок 16 формирования целевого маршрута получает картографическую информацию от навигационной системы 26 и формирует целевой маршрут от пункта отправления до пункта назначения. Целевой маршрут, сформированный посредством блока 16 формирования целевого маршрута, включает в себя траекторию движения транспортного средства по курсу до пункта назначения, также как информацию о поведении транспортного средства (например, скорость транспортного средства, ускорение, угол поворота руля и т.д.). Например, блок 16 формирования целевого маршрута делит курс от пункта отправления до пункта назначения на множество участков с предварительно определенными расстояниями и получает, для каждого участка, картографическую информацию, которая включает в себя курс, от навигационной системы 26, чтобы формировать и обновлять целевой маршрут. Например, блок 16 формирования целевого маршрута задает точку обновления маршрута перед конечной точкой каждого участка и вычисляет и формирует целевой маршрут для следующего участка в точке обновления маршрута. Конечно, способ деления участков и способ задания точек обновления маршрута не ограничиваются вышеописанными. Кроме того, необязательно, чтобы все участки были разделены на одинаковые расстояния, и способ деления может быть изменен при необходимости.
[0021] В основном, при формировании целевого маршрута, блок 16 формирования целевого маршрута вычисляет целевую траекторию транспортного средства (траекторию движения) и поведение транспортного средства и формирует целевой маршрут, так что транспортное средство движется по центру области с возможностью движения, которая получается из картографической информации. Формирование целевого маршрута, который проходит через центр области с возможностью движения, уменьшает вычислительную нагрузку, относящуюся к формированию целевого маршрута. Область с возможностью движения является, например, информацией об области, которая задается заранее в качестве диапазона, в котором транспортное средство может двигаться, так, чтобы обеспечивать предварительно определенный запас места с двух краев полосы движения или от разделяющих полосы линий, учитывая форму дороги и ширину транспортного средства. Предварительно определенный запас места может быть фиксированным значением или может изменяться при необходимости. Например, предварительно определенный запас места может быть изменен на запас места для объезда, который больше обычного запаса места, когда обнаруживается препятствие, которое необходимо объезжать, относительно движения транспортного средства. В первом варианте осуществления будет описан пример, в котором область с возможностью движения получается из картографической информации в качестве диапазона, в котором транспортное средство может двигаться, но ограничение не накладывается таким образом. Например, информация о пограничной линии, которая указывает границы диапазона, в котором транспортное средство может двигаться, может содержаться в картографической информации, и информация о пограничной линии может быть получена из картографической информации в качестве диапазона, в котором транспортное средство может двигаться.
[0022] Предполагается, что приведение в движение по пути с изгибом будет происходить при автоматическом движении транспортного средства. Если существует препятствие на пути с изгибом, может быть спрогнозировано, что образ мышления будет приводить в результате к тому, что пользователь будет выполнять приведение в движение по пути с изгибом так, чтобы не приближаться к препятствию настолько, насколько возможно, для того, чтобы избегать риска соприкосновения или столкновения с препятствием. Следовательно, если препятствие распознается вблизи пути с изгибом, потребуется сформировать целевой маршрут, который находится на расстоянии от препятствия. С другой стороны, однако, если целевой маршрут, который внезапно изменяет направление движения транспортного средства, формируется вблизи пути с изгибом для того, чтобы объезжать препятствие, существует вероятность, что возникнет неожиданное для пользователя изменение в поведении транспортного средства, которое движется, следуя целевому маршруту, и что пользователь почувствует дискомфорт при езде.
[0023] Следовательно, устройство 16 формирования целевого маршрута снабжается, по меньшей мере, блоком получения картографической информации, который получает картографическую информацию, блоком определения пути с изгибом, который определяет, присутствует или нет путь с изгибом по курсу транспортного средства (маршруту движения), на основе картографической информации, блок определения препятствия, который определяет, присутствует или нет препятствие, которое необходимо объезжать, вблизи пути с изгибом, при определении, что путь с изгибом присутствует, и блок формирования целевого маршрута, который формирует целевой маршрут для транспортного средства, который избегает предварительно определенной области, включающей в себя объект, который необходимо объезжать, при определении, что объект, который необходимо объезжать, присутствует.
[0024] В частности, блок 16 формирования целевого маршрута согласно первому варианту осуществления содержит следующую конфигурацию, для того, чтобы реализовывать автоматическое приведение в движение транспортного средства, которое соответствует психологии пользователя, в то же время уменьшая дискомфорт при езде, когда препятствие распознается рядом с путем с изгибом, по которому транспортное средство движется во время автоматического движения.
[0025] Конфигурация блока 16 формирования целевого маршрута будет описана со ссылкой на фиг. 2. Фиг. 2 - это блок-схема, иллюстрирующая конфигурацию блока формирования целевого маршрута согласно первому варианту осуществления. Блок 16 формирования целевого маршрута в качестве устройства формирования целевого маршрута содержит блок 30 получения картографической информации, блок 32 определения пути с изгибом, блок 34 определения препятствия, блок 36 задания виртуальной границы и блок 38 формирования целевого маршрута для пути с изгибом в качестве блока формирования целевого маршрута. Блок 30 получения картографической информации получает картографическую информацию от навигационной системы 26 при формировании целевого маршрута. Блок 32 определения пути с изгибом определяет, присутствует или нет путь с изгибом по курсу транспортного средства (пути движения), на основе полученной картографической информации. Путь с изгибом - это дорога с изогнутой формой, которая изгибается в правом направлении или левом направлении и может включать в себя, например, дорогу с поворотом направо, дорогу с поворотом налево, дорогу только с поворотом направо и дорогу только с поворотом налево, на перекрестке. При определении, что путь с изгибом присутствует, блок 34 определения препятствия определяет, присутствует или нет объект, который необходимо объезжать, вблизи пути с изгибом, на основе полученной картографической информации. В первом варианте осуществления блок 34 определения препятствия определяет, присутствует или нет физическое препятствие, такое как бордюр, стена, здание, зона парковки или область строительства дороги, в качестве объекта, который необходимо объезжать, в середине пути с изгибом. Например, блок 34 определения препятствия может определять, присутствует или нет физическое препятствие, такое как бордюр, стена или здание, по сторонам, которые определяют внешнюю сторону изгиба пути с изгибом. Дополнительно, блок 34 определения препятствия может определять, присутствует или нет физическое препятствие, такое как зона парковки или область строительства дороги, рядом с краями, которые определяют внешнюю сторону изгиба пути с изгибом.
[0026] Когда определяется, что объект, который необходимо объезжать, присутствует в середине пути с изгибом, блок 36 задания виртуальной границы задает виртуальную границу, которая протягивается от объекта, который необходимо объезжать. Кроме того, блок 38 формирования целевого маршрута для пути с изгибом формирует целевой маршрут на основе заданной виртуальной границы.
[0027] Процесс формирования целевого маршрута для пути с изгибом посредством блока 16 формирования целевого маршрута согласно первому варианту осуществления будет описан со ссылкой на фиг. 3 и фиг. 4. Фиг. 3 - это блок-схема последовательности операций, иллюстрирующая процесс формирования целевого маршрута для пути с изгибом согласно первому варианту осуществления. Фиг. 4 - это схематичный вид, иллюстрирующий конфигурацию дороги для пути с изгибом и целевую траекторию транспортного средства согласно первому варианту осуществления.
[0028] Здесь будет описан пример, в котором картографическая информация, полученная при формировании целевого маршрута, содержит курс, в котором полоса движения, по которой транспортное средство 100 в настоящий момент автоматически движется, соединяется с перекрестком на следующем участке, и транспортное средство будет двигаться по дороге только с правым поворотом на перекрестке, как иллюстрировано на фиг. 4. Кроме того, картографическая информация содержит информацию о препятствии с целью, что присутствует бордюр 50, в качестве объекта, который необходимо объезжать, в середине дороги только с поворотом направо, в боковом фрагменте, который определяет внешнюю границу изгиба дороги только с правым поворотом.
[0029] Сначала, блок 16 формирования целевого маршрута определяет, проехало или нет автоматически движущееся транспортное средство точку обновления маршрута, на основе GPS-сигналов и картографической информации от навигационной системы 26, на этапе S10. Здесь, предполагается, что транспортное средство 100, оснащенное устройством 10 управления приведением в движение, проехало точку обновления маршрута. При определении, что транспортное средство 100 не достигло точки обновления маршрута (Нет на этапе S10), блок 16 формирования целевого маршрута повторяет процесс этапа S10 до тех пор, пока не определится, что транспортное средство 100 достигло точки обновления маршрута.
[0030] При определении, что транспортное средство 100 проехало точку обновления маршрута (Да на этапе S10), блок 30 получения картографической информации получает картографическую информацию для следующего участка от навигационной системы 26 на этапе S12.
[0031] Когда картографическая информация получается на этапе S12, блок 32 определения пути с изгибом определяет, присутствует или нет путь с изгибом на следующем участке, для которого целевой маршрут должен быть сформирован, обращаясь к картографической информации, на этапе S14. Здесь, отыскивается курс, в котором полоса движения, по которой транспортное средство 100 в настоящий момент автоматически движется, соединяется с перекрестком на следующем участке, и транспортное средство 100 будет двигаться по дороге только с правым поворотом на перекрестке, как описано выше. Следовательно, блок 32 определения пути с изгибом определяет, что путь с изгибом присутствует на этапе S14. В это время блок 32 определения пути с изгибом дополнительно идентифицирует начальную позицию 54 пути с изгибом и конечную позицию 56 пути с изгибом, со ссылкой на информацию о форме дороги, полученной из картографической информации, и т.п. Кроме того, блок 32 определения пути с изгибом указывает фрагмент между начальной позицией 54 пути с изгибом и конечной позицией 56 пути с изгибом в качестве пути 58 с изгибом. Начальная позиция 54 пути с изгибом, конечная позиция 56 пути с изгибом и путь 58 с изгибом могут также быть указаны в картографической информации заранее.
[0032] При определении, что путь с изгибом не присутствует, на этапе S14 (Нет на этапе S14), блок 16 формирования целевого маршрута заканчивает процесс формирования целевого маршрута.
[0033] С другой стороны, при определении, что путь с изгибом присутствует, на этапе S14 (Да на этапе S14), блок 34 определения препятствия определяет, присутствует или нет физическое препятствие в середине пути 58 с изгибом, на этапе S16. В первом варианте осуществления картографическая информация содержит информацию о препятствии, в том смысле, что бордюр 50 присутствует в середине изгиба дороги только с правым поворотом, в боковом фрагменте, который определяет внешнюю границу изгиба дороги только с правым поворотом. Следовательно, блок 34 определения препятствия определяет, что физическое препятствие присутствует, на этапе S16.
[0034] При определении, что физическое препятствие не присутствует, на этапе S16 (Нет на этапе S16), блок 16 формирования целевого маршрута выполняет формирование целевого маршрута на пути с изгибом посредством обычного управления (этап S18). В качестве примера обычного управления блок 16 формирования целевого маршрута формирует целевой маршрут, в соответствии с чем, транспортное средство 100 движется в центре области с возможностью движения, полученной из картографической информации.
[0035] С другой стороны, при определении, что транспортное средство присутствует, на этапе S16 (Да на этапе S16), блок 36 задания виртуальной границы задает виртуальную границу на этапе S20. В частности, блок 36 задания виртуальной границы предоставляет виртуальную область 60, которая протягивается от бордюра 50 в качестве физического препятствия, по направлению к начальной позиции пути 54 с изгибом и по направлению к конечной позиции пути 56 с изгибом, которые указаны на этапе S14, по изгибу дороги только с правым поворотом, и задает виртуальную область 60 в качестве виртуальной границы, как иллюстрировано на фиг. 4. В то время как виртуальная область 60 задается в качестве виртуальной границы здесь, виртуальная граница не ограничивается виртуальной областью 60. Например, виртуальная граница может быть виртуальной линией, которая протягивается от бордюра 50 вдоль изгиба дороги только с правым поворотом.
[0036] Затем блок 38 формирования целевого маршрута для пути с изгибом формирует целевой маршрут 62 на основе заданной виртуальной области 60 на этапе S22. В частности, блок 38 формирования целевого маршрута для пути с изгибом распознает заданную виртуальную область 60 как физическое препятствие, тем же образом, что и бордюр 50, и формирует целевой маршрут 62, обеспеченный одинаковым расстоянием для объезда, относительно не только бордюра 50, но также виртуальной области 60. В первом варианте осуществления позиция границы L1, которая является, из границ, которые определяют ширину области с возможностью движения, полученной из картографической информации, границей, более близкой к виртуальной области 60 и бордюру 50, перемещается в позицию L2, которая далее отделена от бордюра 50 и виртуальной области 60. Т.е., запас места M1, который был задан в картографической информации относительно дороги только с правым поворотом, изменяется до большего запаса места M2, и расстояние в ширину области с возможностью движения уменьшается. Затем блок 38 формирования целевого маршрута для пути с изгибом формирует целевой маршрут 62, в соответствии с чем, транспортное средство 100 движется по центру уменьшенной ширины области с возможностью движения. Таким образом, в первом варианте осуществления, граница области с возможностью движения изменяется от L1 до L2, и запас места (расстояние объезда) между границей области с возможностью движения и бордюром 50, также как и виртуальной областью 60, изменяется. Т.е., изменяя расстояние по ширине для области с возможностью движения, формируется целевой маршрут 62, в соответствии с чем, транспортное средство плавно движется дальше по внутренней стороне изгиба, чем в центре области с возможностью движения, которая задана в картографической информации.
[0037] На фиг. 4 целевая траектория целевого маршрута 62 транспортного средства, сформированного в первом варианте осуществления, иллюстрируется сплошной линией. Кроме того, на фиг. 4, траектория движения, которая формируется так, чтобы объезжать только бордюр 50, иллюстрируется пунктирной линией, как сравнительная траектория. В сравнительной траектории, иллюстрированной на фиг. 4, траектория движения транспортного средства, которая обеспечивает предварительно определенное расстояние объезда от бордюра 50 только для фрагмента, где бордюр 50 присутствует, формируется так, чтобы соответствовать психологии пользователя, желающего объезжать физические препятствия. Следовательно, в сравнительной траектории, существуют виляния в траектории движения перед и после проезда бордюра 50. Поскольку такие виляния в траектории движения на пути с изгибом создают резкие изменения в поведении транспортного средства, у пользователя возникает дискомфорт.
[0038] С другой стороны, в первом варианте осуществления, блок 34 определения препятствия определяет, присутствует или нет объект, который необходимо объезжать, на пути 58 с изгибом, на основе картографической информации. Затем, при определении, что бордюр 50 присутствует на пути 58 с изгибом в качестве объекта, который необходимо объезжать, блок 36 задания виртуальной границы распространяет виртуальную область 60 в качестве виртуальной границы от бордюра 50 по направлению к начальной позиции 54 пути с изгибом и по направлению к конечной позиции 56 пути с изгибом. После этого блок 38 формирования целевого маршрута для пути с изгибом управляет расстоянием между областью с возможностью движения, которая указывает диапазон с возможностью движения, и бордюром 50, а также виртуальной областью 60. Т.е., блок 38 формирования целевого маршрута для пути с изгибом изменяет границу области с возможностью движения с L1 на L2 и изменяет расстояние между границей области с возможностью движения и бордюром 50, а также виртуальной областью 60, изменяя запас места M1, для случая, в котором определяется, что объект, который необходимо объезжать, отсутствует, до большего запаса места M2. Затем блок 38 формирования целевого маршрута для пути с изгибом формирует целевой маршрут 62 на основе измененного запаса места M2. Таким образом, не только бордюр 50, но также виртуальная область 60 распознается как физическое препятствие, и формируется целевой маршрут 62, который обеспечивает одинаковое расстояние объезда относительно не только бордюра 50, но также виртуальной области 60. Следовательно, представляется возможным формировать целевую траекторию 62, которая не вызывает виляния в траектории целевого маршрута вблизи бордюра 50. Как описано выше, с помощью устройства 10 управления движения, содержащего блок 16 формирования целевого маршрута согласно первому варианту осуществления, представляется возможным формировать целевой маршрут 62, который способен уменьшать дискомфорт, который возникает у пользователя, даже когда определяется, что бордюр 50 присутствует на пути с изгибом, и реализовать автоматическое приведение в движение транспортного средства, которое следует по целевому маршруту 62, сформированному таким образом.
[0039] Блок 16 формирования целевого маршрута, который сформировал целевой маршрут, соответствующий пути с изгибом, завершает формирование целевого маршрута для всего следующего участка, связывая сформированный целевой маршрут с целевыми маршрутами, сформированными для областей перед и после пути с изгибом. Затем блок 12 управления приведением в движение управляет приведением в движение транспортного средства 100 на основе сформированного целевого маршрута.
[0040] Модифицированный пример первого варианта осуществления будет описан ниже.
[0041] (1) Модифицированный пример 1
В примере, описанном выше, блок 16 формирования целевого маршрута задает виртуальную область 60, когда определяется, что физическое препятствие присутствует в середине пути с изгибом, формирует целевой маршрут с помощью виртуальной области 60 и уменьшает формирование виляний в траектории целевого маршрута. Однако, изобретение не ограничивается этим примером. Например, при определении, что бордюр 50 присутствует хотя бы в одном месте в середине пути с изгибом, блок 16 формирования целевого маршрута может перемещать границу L1 на пути 58 с изгибом во внутреннюю сторону изгиба на предварительно определенный диапазон, без задания виртуальной области. Т.е., при определении, что бордюр 50 присутствует в качестве объекта, который необходимо объезжать, может быть сформирован целевой маршрут транспортного средства, который избегает предварительно определенной области вплоть до начальной позиции 54 пути с изгибом и конечной позиции 56 пути с изгибом, включающего в себя бордюр 50.
[0042] Перемещая эту границу L1, представляется возможным задавать запас места от внешнего края изгиба дороги только с правым поворотом, например, запас места для объезда, который больше обычного запаса места, который задан в картографической информации. Следовательно, представляется возможным предоставлять целевой маршрут, который уменьшает виляния в траектории вблизи бордюра 50, и уменьшать дискомфорт, который возникает у пользователя, также с помощью такого модифицированного примера.
2. Второй вариант осуществления
[0043] Далее, устройство 10 управления приведением в движение согласно второму варианту осуществления будет описано со ссылкой на фиг. 5 и фиг. 6. Фиг. 5 - это блок-схема последовательности операций, иллюстрирующая процесс формирования целевого маршрута для пути с изгибом согласно второму варианту осуществления. Фиг. 6 - это схематичный вид, иллюстрирующий конфигурацию дороги для пути с изгибом и целевую траекторию транспортного средства согласно второму варианту осуществления. Во втором варианте осуществления точка, относящаяся к формированию целевого маршрута, когда физическое препятствие присутствует на передней стороне пути 68 с изгибом в направлении движения, в предварительно определенном диапазоне от конечной точки пути 68 с изгибом , отличается от первого варианта осуществления. Конфигурациям, которые являются такими же, что и в первом варианте осуществления, предоставляются те же ссылочные обозначения, и излишние описания опускаются.
[0044] Во втором варианте осуществления будет описан пример, в котором картографическая информация, полученная при формировании целевого маршрута, содержит курс с левым поворотом, в котором полоса движения, по которой транспортное средство 200, оборудованное устройством 10 управления приведением в движение, в настоящий момент автоматически движется, соединяется с перекрестком на следующем участке, и транспортное средство 200 будет въезжать на перекресток и выполнять левый поворот, как иллюстрировано на фиг. 6. Дополнительно, картографическая информация содержит информацию о препятствии в том смысле, что зона 70 парковки присутствует в пределах предварительно определенного расстояния после того, как транспортное средство 200 проезжает перекресток. Конечно, конфигурация дороги на фиг. 6 является лишь примером, и путь 68 с изгибом не ограничивается этим примером. Дополнительно, физическое препятствие не ограничивается зоной 70 парковки и может быть, например, участком строительства, автобусной остановкой или стоянкой такси.
[0045] Процесс формирования целевого маршрута для пути 68 с изгибом согласно второму варианту осуществления будет, в частности, описан ниже. Последовательность обработки от этапа S30 до этапа S32 является такой же, что и последовательность обработки от этапа S10 до этапа S12 в первом варианте осуществления.
[0046] Когда картографическая информация получается на этапе S32, блок 32 определения пути с изгибом определяет, присутствует или нет путь 68 с изгибом на следующем участке, для которого целевой маршрут должен быть сформирован, на основе картографической информации, на этапе S34. Здесь, отыскивается курс с левым поворотом, в котором полоса движения, по которой транспортное средство 200 в настоящее время автоматически движется, соединяется с перекрестком на следующем участке, и транспортное средство будет въезжать на перекресток и выполнять левый поворот, как иллюстрировано на фиг. 6. Следовательно, блок 32 определения пути с изгибом определяет, что путь 68 с изгибом присутствует на этапе S34. В это время, блок 32 определения пути с изгибом дополнительно идентифицирует конечную позицию пути 72 с изгибом курса с левым поворотом, со ссылкой на картографическую информацию. Например, блок 32 определения пути с изгибом идентифицирует сторону перекрестка в качестве конечной позиции пути 72 с изгибом.
[0047] При определении, что путь 68 с изгибом присутствует, на этапе S34 (Да на этапе S34), блок 34 определения препятствия определяет, присутствует или нет препятствие на передней стороне курса с левым поворотом в направлении движения, в пределах предварительно определенного расстояния от конечной позиции пути 72 с изгибом, на этапе S36. Во втором варианте осуществления блок 34 определения препятствия определяет, присутствует или нет физическое препятствие в качестве препятствия. Здесь, как описано выше, картографическая информация включает в себя в тот факт, что зона 70 парковки присутствует в пределах предварительно определенного расстояния от конечной позиции пути 72 с изгибом курса с левым поворотом. Следовательно, блок 34 определения препятствия определяет, что физическое препятствие присутствует, на этапе S36 (Да на этапе S36).
[0048] При определении, что физическое препятствие не присутствует, на этапе S36 (Нет на этапе S36), блок 16 формирования целевого маршрута выполняет формирование целевого маршрута на пути с изгибом посредством обычного управления, тем же образом, что и в первом варианте осуществления (этап S38).
[0049] С другой стороны, при определении, что физическое препятствие присутствует, на этапе S36 (Да на этапе S36), блок 36 задания виртуальной границы задает виртуальную границу на этапе S40. В частности, блок 36 задания виртуальной границы задает виртуальную область 74, которая протягивается от зоны 70 парковки по направлению к перекрестку, по меньшей мере, до конечной позиции пути 72 с изгибом курса с левым поворотом (боковой край перекрестка), в качестве виртуальной границы, как иллюстрировано на фиг. 6. В то время как виртуальная область 74 задается в качестве виртуальной границы здесь, виртуальная граница не ограничивается виртуальной областью. Например, виртуальная граница может быть виртуальной линией, которая протягивается от зоны 70 парковки.
[0050] После этого блок 38 формирования целевого маршрута для пути с изгибом формирует целевой маршрут 76 на основе заданной виртуальной области 74 на этапе S42. В частности, блок 38 формирования целевого маршрута для пути с изгибом распознает заданную виртуальную область 74 в качестве физического препятствия, тем же образом, что и зону 70 парковки, и формирует целевой маршрут 76, который обеспечивает одинаковое расстояние объезда относительно не только зоны 70 парковки, но также виртуальной области 74. В качестве способа формирования целевого маршрута 76, например, целевой маршрут 76 может быть сформирован так, что позиция границы области с возможностью движения относительно виртуальной области 74 и зоны 70 парковки изменяется; другими словами, ширина области с возможностью движения изменяется на более узкую, и что транспортное средство 200 движется по центру области с возможностью движения после изменения, тем же образом, что и в первом варианте осуществления.
[0051] На фиг. 6 целевая траектория целевого маршрута 76 транспортного средства, сформированного во втором варианте осуществления, иллюстрируется сплошной линией. Кроме того, на фиг. 6, траектория 78 движения, которая формируется так, чтобы объезжать только зону 70 парковки, иллюстрируется пунктирной линией, как сравнительная траектория.
[0052] Сравнительная траектория 78 на фиг. 6 формируется так, чтобы обеспечивать расстояние объезда только относительно зоны 70 парковки. Следовательно, в сравнительной траектории 78, виляние присутствует перед проездом зоны 70 парковки. Поскольку такое виляние в траектории создается в конечной позиции перекрестка, т.е., в позиции рядом с конечной позицией пути 72 с изгибом, поведение транспортного средства изменяется снова непосредственно после проезда перекрестка, вызывая у пользователя дискомфорт при езде.
[0053] С другой стороны, во втором варианте осуществления, блок 34 определения препятствия определяет, присутствует или нет объект, который необходимо объезжать, на передней стороне курса с левым поворотом в направлении движения, в пределах предварительно определенного расстояния от конечной позиции пути 72 с изгибом, на основе картографической информации. Затем, при определении, что зона 70 парковки присутствует в качестве объекта, который необходимо объезжать, блок 36 задания виртуальной границы распространяет виртуальную область 74 в качестве виртуальной границы от зоны 70 парковки по направлению, по меньшей мере, к конечной позиции пути 72 с изгибом. После этого блок 38 формирования целевого маршрута для пути с изгибом управляет расстоянием между областью с возможностью движения, которая указывает диапазон с возможностью движения, и зоной 70 парковки, а также виртуальной областью 74. Т.е., блок 38 формирования целевого маршрута для пути с изгибом изменяет расстояние между границей области с возможностью движения и зоной 70 парковки, а также виртуальной областью 74, которая должна быть увеличена, и формирует целевой маршрут 76 на основе измененного расстояния. Т.е., виртуальная область 74 задается, и не только зона 70 парковки, но также виртуальная область 74, распознается как физическое препятствие, чтобы формировать целевой маршрут 76, как иллюстрировано на фиг. 6. Следовательно, поскольку целевой маршрут 76 вычисляется так, чтобы обеспечивать расстояние объезда также относительно виртуальной области 74, целевой маршрут 76, который избегает зоны 70 парковки, формируется от места далее с передней стороны зоны 70 парковки, и вблизи зоны 70 парковки не формируется виляние в траектории целевого маршрута 76. Соответственно, представляется возможным уменьшать дискомфорт, который возникает у пользователя, даже при определении, что зона 70 парковки присутствует вблизи пути 68 с изгибом.
[0054] Модифицированный пример второго варианта осуществления будет описан ниже.
(1) Модифицированный пример 1
В примере, описанном выше, когда зона 70 парковки присутствует в пределах предварительно определенного расстояния от конечной позиции пути 72 с изгибом, блок 16 формирования целевого маршрута задает виртуальную область 74 и затем распознает виртуальную область 74 как физическое препятствие, чтобы уменьшать формирование виляния в траектории целевого маршрута. Однако, изобретение не ограничивается этим примером. Например, если зона 70 парковки присутствует в пределах предварительно определенного расстояния от конечной позиции пути 72 с изгибом, целевой маршрут от зоны 70 парковки до конечной позиции пути 72 с изгибом может быть сконфигурирован так, что запас места от крайнего фрагмента полосы движения задается, например, в качестве запаса места для объезда, который больше обычного запаса места, который задается в картографической информации. Т.е., при определении, что зона 70 парковки присутствует в качестве объекта, который необходимо объезжать, может быть сформирован целевой маршрут транспортного средства, который избегает предварительно определенной области вплоть до конечной позиции пути 72 с изгибом, включающей в себя зону 70 парковки. Представляется возможным предоставлять целевой маршрут без формирования виляния в траектории вблизи припаркованной области 70 и уменьшать дискомфорт, который возникает у пользователя, также с помощью такого модифицированного примера.
3. Третий вариант осуществления
[0055] Далее будет описано устройство 10 управления приведением в движение согласно третьему варианту осуществления. В третьем варианте осуществления способ обнаружения физического препятствия при формировании целевого маршрута отличается от первого варианта осуществления. Т.е., блок 34 определения препятствия не определяет, присутствует или нет объект, который необходимо объезжать, на основе картографической информации, а вместо этого определяет, присутствует или нет объект, который необходимо объезжать, получая информацию об окружающих условиях для транспортного средства, которая обнаруживается. Поскольку другие конфигурации являются такими же, что и в первом варианте осуществления, одинаковым конфигурациям предоставляются одинаковые ссылочные обозначения, и избыточные описания опускаются.
[0056] В третьем варианте осуществления физическое препятствие обнаруживается с помощью радара 20 и камеры 22 вместо картографической информации, которая хранится в навигационной системе 26. В частности, блок 14 определения состояния объекта обнаруживает позицию объекта, который присутствует около рассматриваемого транспортного средства, в качестве информации об окружающих условиях для транспортного средства, используя данные, которые обнаруживаются посредством радара 20, а также изображения окружающей обстановки для рассматриваемого транспортного средства, захваченные посредством камеры 22. Затем, блок 34 определения препятствия определяет, присутствует или нет физическое препятствие вблизи пути с изгибом, используя курс от пункта отправления до пункта назначения, найденный посредством навигационной системы 26, и объект, обнаруженный посредством блока 14 определения состояния объекта.
[0057] Кроме того, физическое препятствие может быть обнаружено с помощью информации, которая принимается посредством связи между транспортными средствами, вместо картографической информации, которая хранится в навигационной системе 26. Например, устройство связи между транспортными средствами, которое передает информацию о транспортном средстве, включающую в себя позицию и рабочее состояние транспортного средства, между транспортными средствами, может быть установлено на транспортное средство. Тогда, блок 14 определения состояния объекта может обнаруживать, например, транспортное средство, которое припарковано, в качестве информации об окружающих условиях для транспортного средства, на основе информации о транспортном средстве от устройства связи между транспортными средствами. Затем, блок 34 определения препятствия может определять, является или нет припаркованное транспортное средство физическим препятствием вблизи пути с изгибом, на основе курса от пункта отправления до пункта назначения, найденного посредством навигационной системы 26, и информации о припаркованном транспортном средстве, которая обнаруживается посредством блока 14 обнаружения состояния объекта.
4. Четвертый вариант осуществления
[0058] Далее будет описано устройство 10 управления приведением в движение согласно четвертому варианту осуществления. В четвертом варианте осуществления препятствие, которое обнаруживается при формировании целевого маршрута, отличается от первого варианта осуществления. Поскольку другие конфигурации являются такими же, что и в первом варианте осуществления, одинаковым конфигурациям предоставляются одинаковые ссылочные обозначения, и избыточные описания опускаются.
[0059] В первом варианте осуществления объект, который необходимо объезжать, неподвижен относительно пути с изгибом; т.е., обнаруженное препятствие является остановленным физическим препятствием, таким как бордюр. Однако, в четвертом варианте осуществления, препятствие, которое обнаруживается в качестве объекта, который необходимо объезжать, может быть подвижным телом, которое движется относительно пути с изгибом, вместо стоящего физического препятствия. Примеры подвижного тела включают в себя мотоциклы, велосипеды и пешеходов.
[0060] В частности, блок 14 определения состояния объекта обнаруживает объект с помощью картографической информации, данных от радара 20, данных изображений, захваченных посредством камеры 22, и т.п., и отслеживает объект, чтобы, таким образом, определять относительную скорость объекта от пути с изгибом, и относительную позицию объекта относительно пути с изгибом. Затем, блок 14 определения состояния объекта определяет, является или нет объект движущимся телом, на основе обнаруженной информации. После этого, блок 34 определения препятствия определяет, станет или нет движущееся тело объектом, который необходимо объезжать, вблизи пути с изгибом. Если движущееся тело является объектом, который необходимо объезжать, целевой маршрут формируется на основе виртуальной границы посредством этапа S22 на фиг. 3. Конечно, четвертый вариант осуществления может также быть применен ко второму варианту осуществления.
[0061] Таким образом, с помощью устройства 10 управления приведением в движение, содержащего блок 16 формирования целевого маршрута согласно четвертому варианту осуществления, представляется возможным предоставлять целевой маршрут, который уменьшает виляния в траектории вблизи движущегося тела и уменьшать дискомфорт, который возникает у пользователя, даже когда определяется, что движущееся тело присутствует на пути с изгибом в качестве объекта, который необходимо объезжать.
5. Другие варианты осуществления
[0062] (1) С первого варианта осуществления по четвертый вариант осуществления были описаны выше как различные варианты осуществления. Однако, два или более вариантов осуществления могут быть различным образом объединены и выполнены.
[0063] (2) В вариантах осуществления, описанных выше, блок 16 формирования целевого маршрута выполняет формирование и обновление целевого маршрута, когда рассматриваемое транспортное средство достигает точки обновления маршрута, но ограничение не накладывается таким образом. Например, целевой маршрут от текущей позиции до пункта назначения может быть сформирован, когда пользователь вводит пункт назначения.
[0064] (3) В вариантах осуществления, описанных выше, были описаны примеры, в которых блок 16 формирования целевого маршрута в основном формирует целевой маршрут, в соответствии с чем, транспортное средство движется по центру области с возможностью движения, полученной из картографической информации. Однако, необязательно, чтобы целевой маршрут был по центру области с возможностью движения, и целевой маршрут может быть сформирован в позиции, отличной от центра области с возможностью движения, пока оба края транспортного средства в поперечном направлении транспортного средства не выходят за пределы области с возможностью движения. Например, целевой маршрут может быть предусмотрен дальше на внутренней стороне изгиба, чем центр области с возможностью движения относительно пути с изгибом.
[0065] (4) Формирование целевого маршрута из настоящей заявки может быть использовано, даже если полностью автономное управление приведением в движение не выполняется, или даже когда автономное выполнение приведением в движение не выполняется вообще. Например, целевой маршрут, сформированный посредством блока 16 формирования целевого маршрута, может быть просто сообщен водителю, или условия движения для осуществления сформированного целевого маршрута могут быть сообщены пользователю. В этих случаях поддержка вождения для поддержки вождения для пользователя (водителя) будет выполняться вместо автономного управления приведением в движение. Кроме того, даже если полностью автономное управление приведением в движение не выполняется, может быть выполнена помощь при вождении, такая как выполнение только ускорения/замедления или только руление посредством устройства 10 управления приведением в движение.
[0066] (5) Варианты осуществления, описанные выше, могут быть применены к движению как посредством регулирования дорожного движения, которое оговаривает правостороннее движение транспортных средств, так и регулирования дорожного движения, которое оговаривает левостороннее движение транспортных средств.
[0067] Устройство формирования целевого маршрута и устройство управления приведением в движение, содержащее блок формирования целевого маршрута настоящего изобретения, были описаны подробно выше, но настоящее изобретение не ограничивается вариантами осуществления, описанными выше. Дополнительно, само собой разумеется, что различные улучшения и модификации могут быть выполнены без отступления от духа настоящего изобретения.
Описания ссылочных обозначений
[0068]
10 Устройство управления приведением в движение
12 Блок управления приводом
14 Блок определения состояния объекта
16 Блок формирования целевого маршрута (устройство формирования целевого маршрута)
30 Блок получения картографической информации
32 Блок определения пути с изгибом
34 Блок определения препятствия
36 Блок задания виртуальной границы
38 Блок формирования целевого маршрута для пути с изгибом (блок формирования целевого маршрута)


Группа изобретений относится к устройству формирования целевого маршрута и устройству управления движением. Устройство формирования целевого маршрута содержит блок получения картографической информации, блок определения пути с изгибом, блок определения препятствия, блок задания виртуальной границы и блок формирования целевого маршрута. Блок определения пути с изгибом определяет, присутствует или нет путь с изгибом на маршруте приведения в движение транспортного средства, на основе картографической информации из блока получения картографической информации. При определении, что путь с изгибом присутствует, блок определения препятствия определяет, присутствует или нет объект, который необходимо объезжать, вблизи пути с изгибом. При определении, что присутствует объект, который необходимо объезжать, задают виртуальную границу от объекта, который необходимо объезжать, а блок формирования целевого маршрута формирует целевой путь для транспортного средства для того, чтобы объезжать предварительно определенную область, включающую в себя объект, который необходимо объезжать. Обеспечивается устранение дискомфорта у пользователей при обнаружении препятствия. 2 н. и 11 з.п. ф-лы, 6 ил.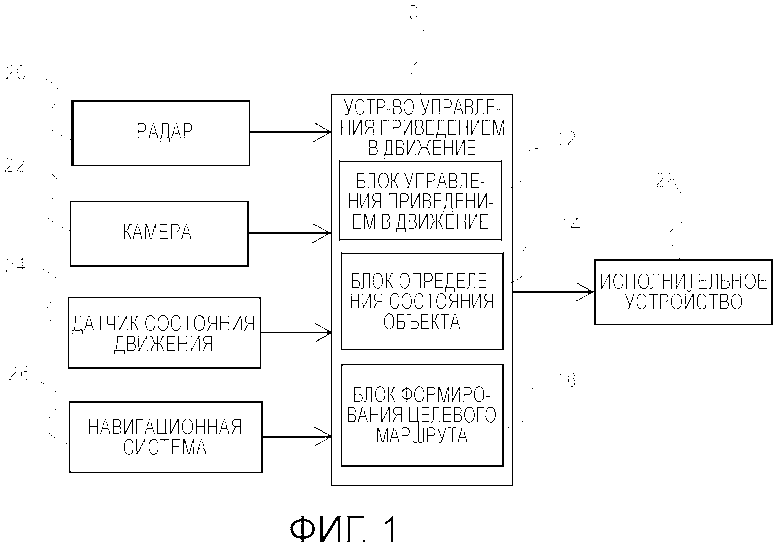
1. Устройство формирования целевого маршрута, содержащее:
блок получения картографической информации, имеющий полученную картографическую информацию;
блок определения пути с изгибом, который определяет, присутствует или нет путь с изгибом на маршруте приведения в движение транспортного средства, на основе картографической информации;
блок определения препятствия, который определяет, присутствует или нет объект, который необходимо объезжать, вблизи пути с изгибом, при определении, что путь с изгибом присутствует;
блок задания виртуальной границы, который задает виртуальную границу, которая протягивается от объекта, который необходимо объезжать, при определении, что объект, который необходимо объезжать, присутствует; и
блок формирования целевого маршрута, который формирует целевой маршрут для транспортного средства, которое объезжает объект, который необходимо объезжать, и задает виртуальную границу при определении, что объект, который необходимо объезжать, присутствует;
при этом
блок задания виртуальной границы задает виртуальную границу, которая протягивается от объекта, который необходимо объезжать, по направлению, по меньшей мере, к одной из начальной позиции и конечной позиции пути с изгибом.
2. Устройство формирования целевого маршрута по п. 1, в котором блок определения препятствия определяет, присутствует или нет объект, который необходимо объезжать, на участке изгиба пути с изгибом.
3. Устройство формирования целевого маршрута по п. 1, в котором блок определения препятствия определяет, присутствует или нет объект, который необходимо объезжать, дальше с передней стороны транспортного средства, чем путь с изгибом, в направлении продвижения в пределах предварительно определенного диапазона от конечной позиции пути с изгибом.
4. Устройство формирования целевого маршрута по п. 2, в котором блок задания виртуальной границы задает виртуальную границу, которая протягивается от объекта, который необходимо объезжать, к начальной позиции пути с изгибом и конечной позиции пути с изгибом.
5. Устройство формирования целевого маршрута по п. 3, в котором блок задания виртуальной границы задает виртуальную границу, которая протягивается от объекта, который необходимо объезжать, по направлению, по меньшей мере, к конечной позиции пути с изгибом.
6. Устройство формирования целевого маршрута по любому из пп. 1-5, в котором:
картографическая информация содержит информацию, относящуюся к диапазону, в котором транспортное средство может двигаться; и
при определении, что объект, который необходимо объезжать, присутствует, блок формирования целевого маршрута формирует целевой маршрут на основе нового диапазона с возможностью движения, который отличается от диапазона с возможностью движения из картографической информации.
7. Устройство формирования целевого маршрута по п. 6, в котором блок формирования целевого маршрута изменяет границу, которая определяет диапазон с возможностью движения из картографической информации, на границу, которая определяет новый диапазон с возможностью движения, так что граница, которая определяет новый диапазон с возможностью движения, отделяется больше от объекта, который необходимо объезжать, и виртуальной границы, чем граница, которая определяет диапазон с возможностью движения из картографической информации.
8. Устройство формирования целевого маршрута по п. 1, в котором:
картографическая информация содержит информацию, относящуюся к объекту, который необходимо объезжать, и
блок определения препятствия определяет, присутствует или нет объект, который необходимо объезжать, вблизи пути с изгибом, на основе картографической информации.
9. Устройство формирования целевого маршрута по п. 1, в котором блок определения препятствия получает информацию об окружающих условиях для транспортного средства, которая обнаруживается, и определяет, присутствует или нет объект, который необходимо объезжать, вблизи пути с изгибом.
10. Устройство формирования целевого маршрута по п. 8 или 9, в котором объект, который необходимо объезжать, неподвижен относительно пути с изгибом.
11. Устройство формирования целевого маршрута по п. 8 или 9, при этом объект, который необходимо объезжать, является движущимся телом, которое движется относительно пути с изгибом.
12. Устройство управления движением, содержащее:
устройство формирования целевого маршрута по любому из пп. 1-11; и
блок управления приводом, который управляет приведением в движение транспортного средства на основе целевого маршрута, сформированного посредством устройства формирования целевого маршрута.
13. Устройство управления движением по п. 12, дополнительно содержащее:
блок определения состояния объекта, который обнаруживает информацию об окружающих условиях для транспортного средства, при этом
блок определения препятствия получает информацию об окружающих условиях для транспортного средства, которая обнаруживается посредством блока обнаружения информации об объекте, и определяет, присутствует или нет препятствие вблизи пути с изгибом.
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Упругое экипажное колесо | 1925 |
|
SU7823A1 |
| СПОСОБ ПОДЗЕМНОГО И КУЧНОГО ВЫЩЕЛАЧИВАНИЯ МЕТАЛЛОВ | 1996 |
|
RU2116440C1 |
| WO 2013046298 A1, 04.04.2013. | |||

