Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу и устройству управления движением транспортного средства с помощью при вождении, посредством которых обнаруживаются левая и правая границы полосы движения, и осуществляется управление движением транспортного средства-носителя на основании результата обнаружения границ полосы движения.
[0002] Одно известное до сих пор устройство для управления помощью при вождении транспортного средства обнаруживает левую и правую полосы движения, принимает положения, центрированные между обнаруженными левой и правой полосами движения, в качестве целевого маршрута, и управляет транспортным средством-носителем таким образом, чтобы оно двигалось по этому целевому маршруту (например, см. патентный документ 1).
Документы из уровня техники
Патентные документы
[0003] Патентный документ 1: Публикация заявки на патент Японии № 2015-13545
Раскрытие изобретения
Проблемы, решаемые изобретением
[0004] Однако это традиционное устройство не может справиться с изменениями кривизны дороги при движении по кривой, и значения обнаружения границ полосы движения имеют тенденцию к отставанию. Следовательно, результаты обнаружения границ полосы движения с внутренней стороны изгиба дороги принимают значения в направлении, приближающемся к транспортному средству-носителю. Это приводит к движению, которое смещается к внешней стороне изгиба дороги на участке кривой, где изменяется кривизна.
[0005] Настоящее изобретение сосредоточено на указанной выше проблеме, причём его задача состоит в обеспечении возможности движения без смещения к внешней стороне изгиба дороги на участке кривой, где изменяется кривизна.
Средства для решения проблем
[0006] Для решения вышеуказанной задачи в настоящем изобретении предусмотрен контроллер, который обнаруживает левую и правую границы полосы движения и который управляет движением транспортного средства-носителя на основании результата обнаружения границ полосы движения. В способе управления движением транспортного средства с помощью при вождении кривая и направление кривой различаются на основании информации о геометрии дороги. При движении по кривой результат обнаружения границы полосы движения с внутренней стороны изгиба дороги устанавливается равным значению, для которого изменение в боковом направлении с приближением к транспортному средству-носителю, ограничено.
ЭФФЕКТ ИЗОБРЕТЕНИЯ
[0007] За счёт установки результата обнаружения границ полосы движения с внутренней стороны изгиба дороги, где значения обнаружения границ полосы движения имеют тенденцию к отставанию, в значение, для которого изменение в боковом направлении с приближением к транспортному средству-носителю, ограничено при движении по кривой, как описано выше, возможно движение без смещения к внешней стороне изгиба дороги на участке кривой, на котором изменяется кривизна.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Фиг.1 представляет собой общую схему системы, иллюстрирующую систему управления автономным движением, в которой были применены способ и устройство для управления движением по первому варианту осуществления.
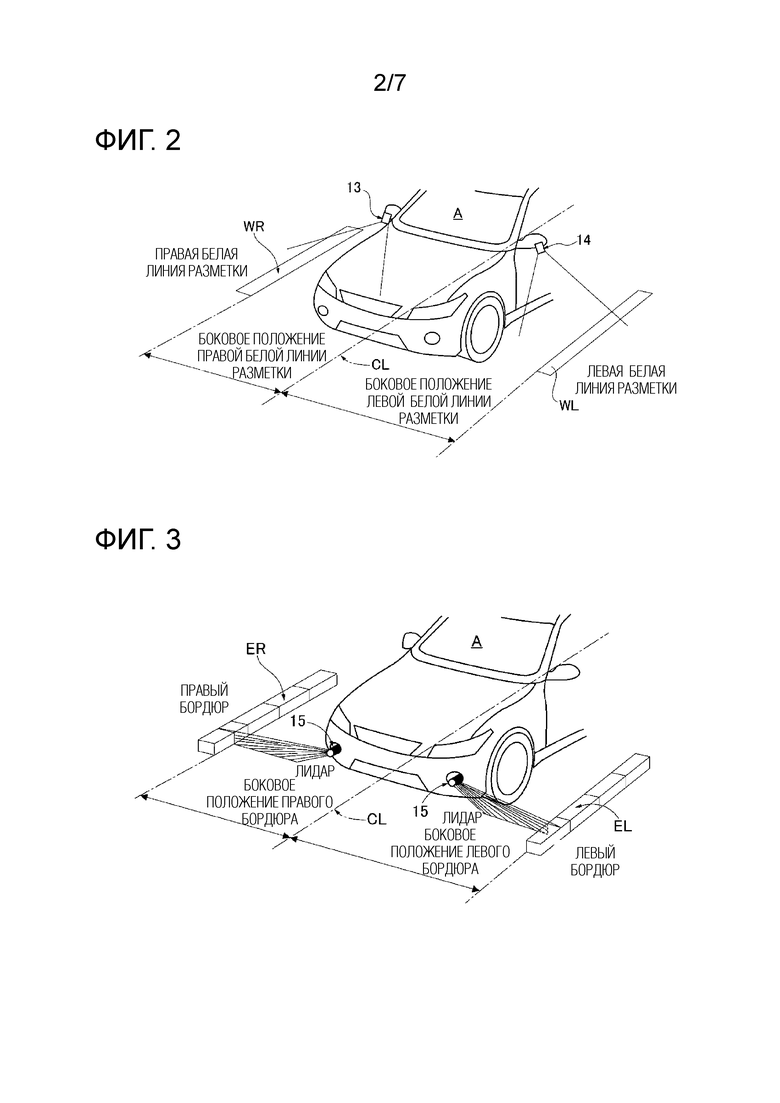
Фиг.2 представляет собой вид в перспективе, иллюстрирующий, среди бортовых датчиков, левую камеру распознавания и правую камеру распознавания по первому варианту осуществления.
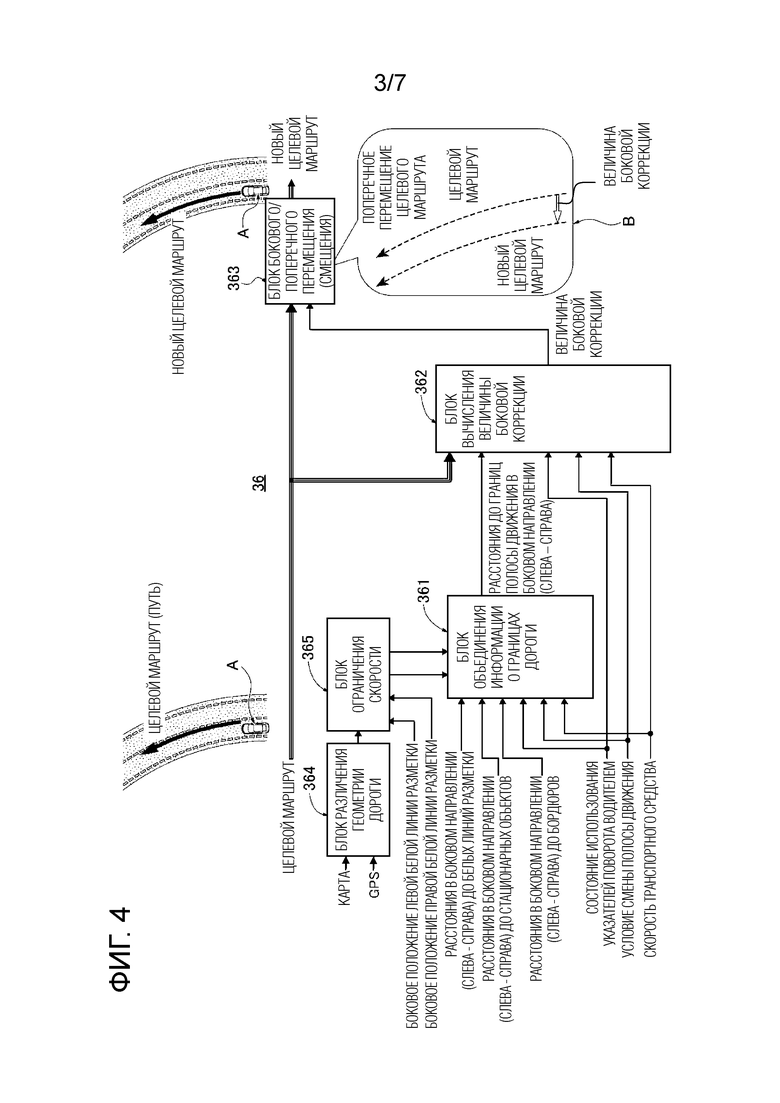
Фиг.3 представляет собой вид в перспективе, иллюстрирующий, среди бортовых датчиков, лидар, предусмотренный в левом и правом положениях в передней части транспортного средства, по первому варианту осуществления.
Фиг.4 является общей блок-схемой, иллюстрирующей корректор целевого маршрута блока управления навигацией по первому варианту осуществления.
Фиг.5 является подробной блок-схемой, иллюстрирующей подробную конфигурацию блока ограничения скорости в корректоре целевого маршрута, проиллюстрированном на фиг.4.
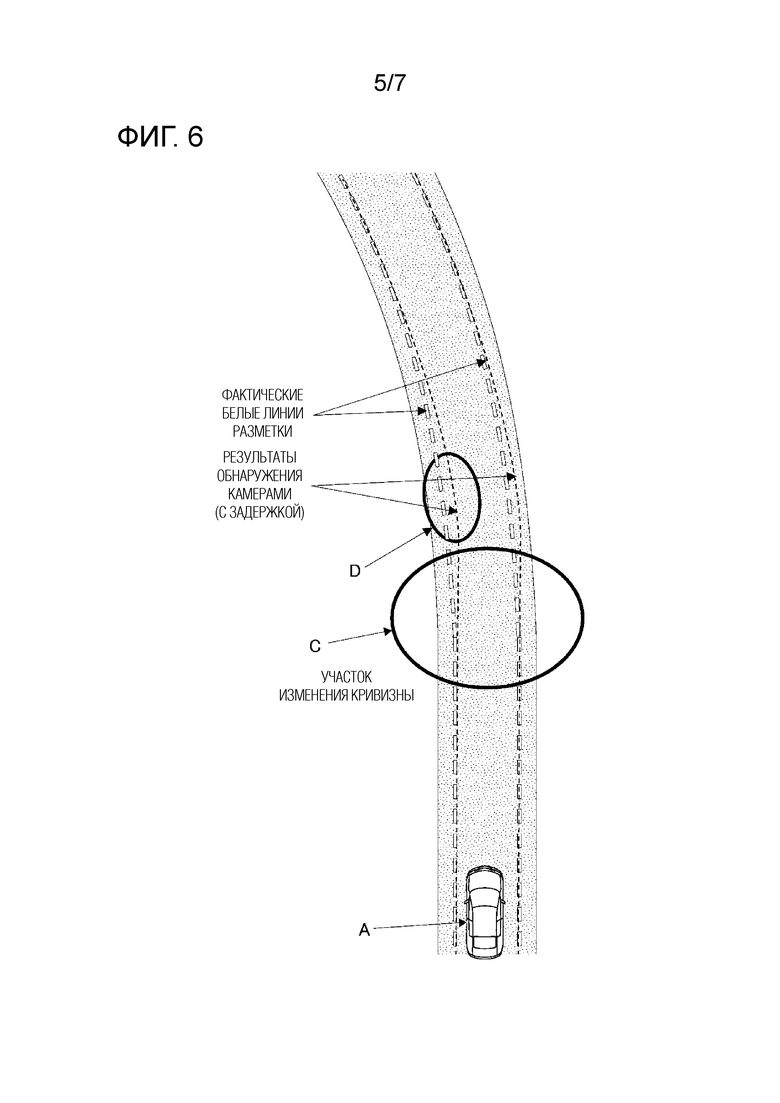
Фиг.6 представляет собой пояснительную схему, иллюстрирующую результат обнаружения границ полосы движения с внутренней стороны изгиба дороги и результат обнаружения границ полосы движения с внешней стороны изгиба дороги в сравнительном примере при прохождении кривой.
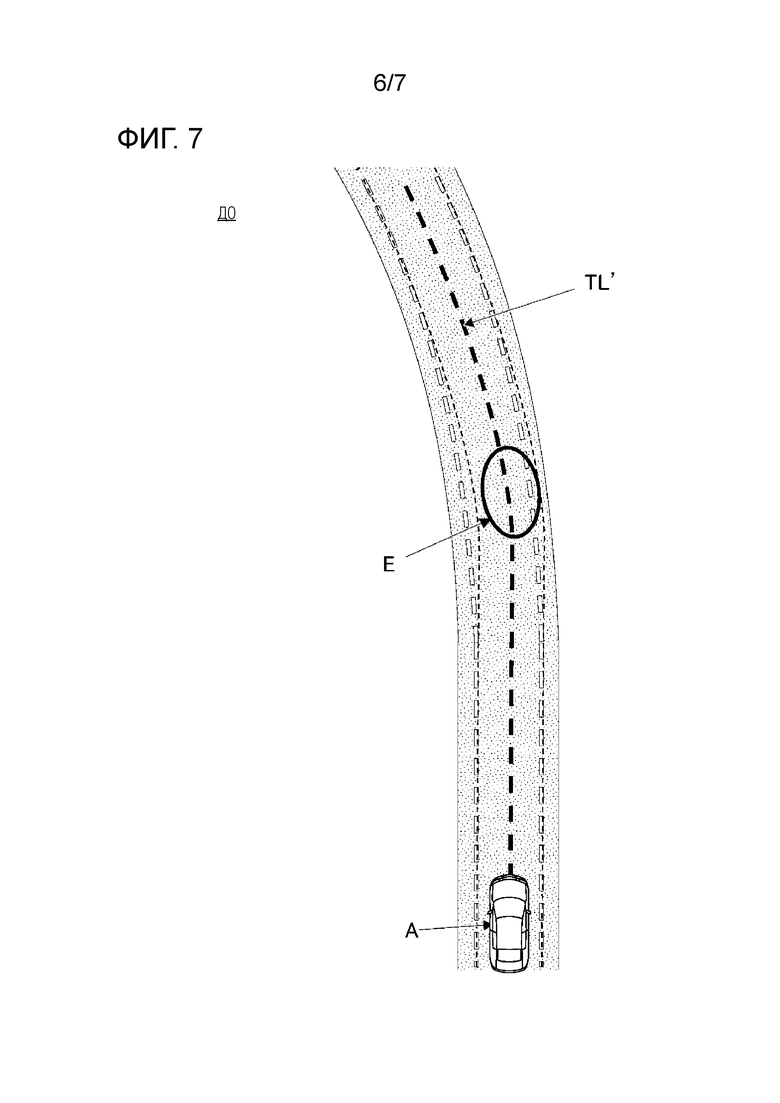
Фиг.7 является пояснительной схемой, иллюстрирующей операцию для управления движением при движении по кривой в сравнительном примере.
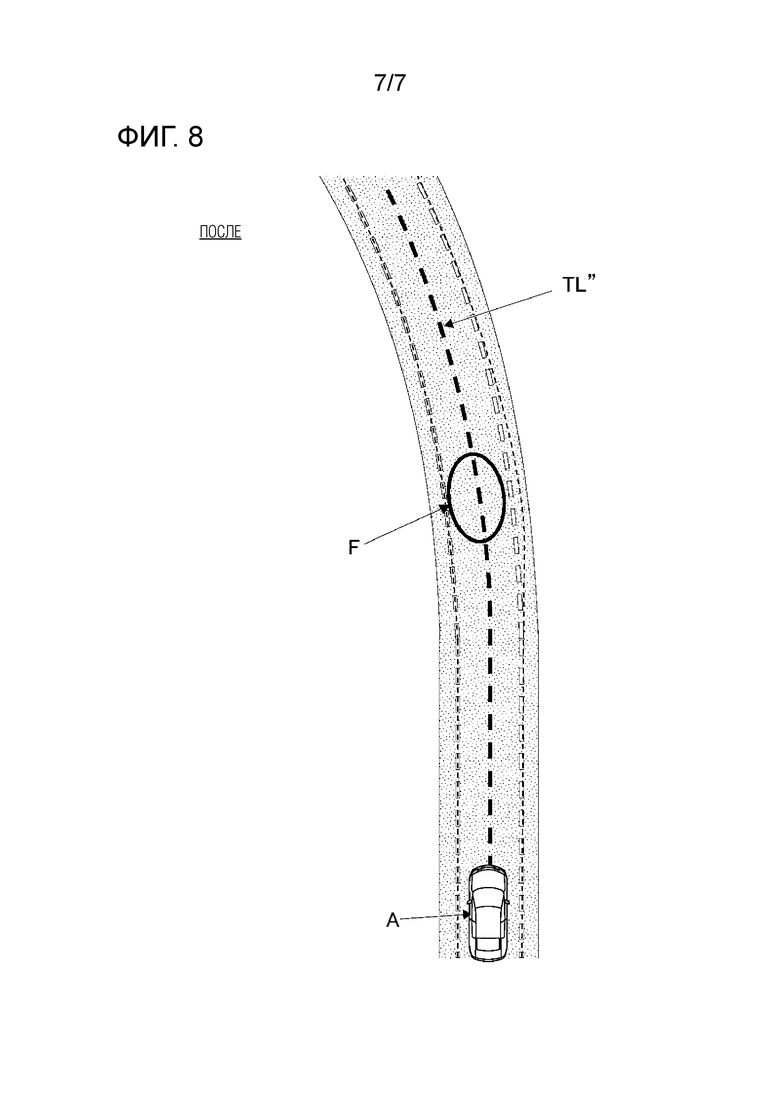
Фиг.8 является пояснительной схемой, иллюстрирующей операцию для управления движением при движении по кривой в первом варианте осуществления.
Осуществление изобретения
[0009] Предпочтительный вариант осуществления для реализации способа и устройства для управления движением транспортного средства с помощью при вождении согласно настоящему изобретению будет описан ниже с обращением к первому варианту осуществления, проиллюстрированному на чертежах.
Первый вариант осуществления
[0010] Сначала будет описана конфигурация. Способ и устройство для управления движением по первому варианту осуществления применяются в автономном транспортном средстве (один пример транспортного средства с помощью при вождении), в котором рулевое управление/движение/торможение автоматически управляются в соответствии с выбором режима автономного управления с использованием информации о целевом маршруте, формируемой блоком управления навигацией. Конфигурация первого варианта осуществления будет описана под заголовками «Общая конфигурация системы», «Подробная конфигурация блока управления навигацией» и «Общая конфигурация корректора целевого маршрута» и «Подробная конфигурация блока ограничения скорости».
[Общая конфигурация системы]
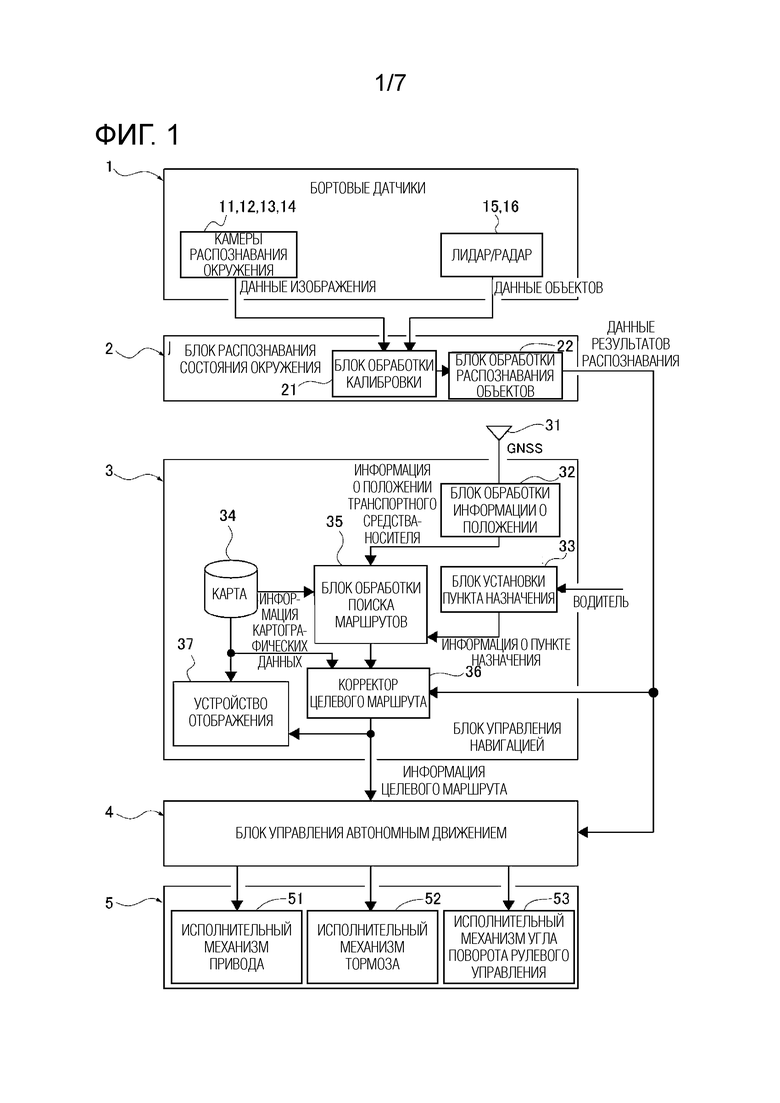
Фиг.1 иллюстрирует систему управления автономным движением, в которой были применены способ и устройство для управления движением по первому варианту осуществления. Фиг. 2 иллюстрирует, среди бортовых датчиков, левую камеру распознавания и правую камеру распознавания. На Фиг. 3 показан, среди бортовых датчиков, лидар, предусмотренный в левом и правом положениях в передней части транспортного средства. Общая конфигурация системы будет описана ниже с обращением к фиг. 1-3.
[0012] Как показано на фиг. 1, система управления автономным движением содержит бортовые датчики 1, блок 2 распознавания состояния окружения, блок 3 управления навигацией, блок 4 управления автономным движением и исполнительные механизмы 5. Блок 2 распознавания состояния окружения, блок 3 управления навигацией и блок 4 управления автономным движением представляют собой компьютеры, которые содержат ЦП или другой блок обработки и выполняют арифметическую обработку.
[0013] Бортовые датчики 1 представляют собой датчики, которые установлены на автономном транспортном средстве и получают информацию об окружении транспортного средства-носителя. Бортовые датчики 1 включают в себя переднюю камеру 11 распознавания, заднюю камеру 12 распознавания, правую камеру 13 распознавания, левую камеру 14 распознавания, лидар 15 и радар 16. Бортовые датчики 1 включают в себя в качестве датчиков, которые получают информацию, необходимую для управления автономным движением, отличную от информации об окружении транспортного средства-носителя, датчик скорости транспортного средства, датчик скорости рыскания, переключатель сигнала поворота и т.д. (ни один из которых не проиллюстрирован).
[0014] В сочетании, передняя камера 11 распознавания, задняя камера 12 распознавания, правая камера 13 распознавания и левая камера 14 распознавания составляют камеру распознавания окружения (монитор кругового обзора (AVM)). Эта камера распознавания окружения обнаруживает объекты на пути движения транспортного средства-носителя, объекты за пределами пути движения транспортного средства-носителя (дорожные конструкции, движущиеся впереди транспортные средства, движущиеся сзади транспортные средства, встречные транспортные средства, соседние транспортные средства, пешеходы, велосипеды, мотоциклы), путь движения транспортного средства-носителя (белые линии дорожной разметки, границы дорог, линии остановки, пешеходные переходы), дорожные знаки (ограничения скорости) и т.д.
[0015] Как проиллюстрировано на фиг.2, правая камера 13 распознавания представляет собой камеру типа «рыбий глаз», которая встроена в зеркало правой двери. Правая камера 13 распознавания имеет функцию обнаружения бокового положения правой белой линии разметки. Как показано на фиг.2, левая камера 14 распознавания представляет собой камеру типа «рыбий глаз», которая встроена в зеркало левой двери. Левая камера 14 распознавания имеет функцию обнаружения бокового положения левой белой линии разметки.
Боковое положение правой белой линии разметки относится к длине до положения внутреннего края правой белой линии WR разметки от положения центральной линии CL в направлении ширины транспортного средства у транспортного средства-носителя А. Левое боковое положение белой линии разметки относится к длине до положения внутреннего края левой белой линии WL разметки из положения центральной линии CL в направлении ширины транспортного средства у транспортного средства-носителя A. Правые белые линии WR разметки и левые белые линии WL разметки являются левой и правой границами полосы движения, и боковое положение правой белой линии разметки и боковое положение левой белой линии разметки являются результатами определения левой и правой границ полосы движения.
[0016] Лидар 15 и радар 16 расположены в положениях на передней стороне транспортного средства-носителя, причем оси освещения их выходной волны направлены вперед по отношению к транспортному средству. Принимая волны, которые отражаются назад, лидар 15 и радар 16 обнаруживают присутствие объектов перед транспортным средством-носителем, и обнаруживаются расстояния до объектов перед транспортным средством-носителем. Лидар 15 и радар 16, которые представляют собой два типа датчиков измерения расстояния, в сочетании составляют лидар/радар и, например, для этого может быть использован лазерный радар, радар миллиметрового диапазона, ультразвуковой радар, лазерный дальномер и т.д. Лидар 15 и радар 16 определяют положения объектов и расстояния до них, включая объекты на траектории движения транспортного средства-носителя и объекты за пределами пути движения транспортного средства-носителя (дорожные конструкции, движущиеся впереди транспортные средства, движущиеся сзади транспортные средства, встречные транспортные средства, соседние транспортные средства, пешеходы, велосипеды, мотоциклы).
[0017] Как показано на фиг.3, лидар 15 предусмотрен в левом и правом положениях на передней стороне транспортного средства-носителя A с возможностью наклона, и направлены наклонно вниз и вправо и наклонно вниз и налево. Лидар 15 имеет функцию обнаружения бокового положения правого бордюра и функцию обнаружения бокового положения левого бордюра. Боковое положение правого бордюра относится к длине до положения внутреннего края правого бордюра ER от положения центральной линии CL в направлении ширины транспортного средства для транспортного средства-носителя А. Боковое положение левого бордюра относится к длине до положения внутреннего края левого бордюра EL от положения центральной линии CL в направлении ширины транспортного средства для транспортного средства-носителя A. Правые бордюры ER и левые бордюры EL представляют собой левый и правый края дороги, и положение на заданном расстоянии внутри бокового положения правого бордюра и положение нa заданном расстоянии внутри бокового положения левой белой линии разметки являются результатами обнаружения левой и правой границ полосы движения.
[0018] Блок 2 распознавания состояния окружения принимает в качестве входных данных данные изображения от камер 11, 12, 13, 14 распознавания и данные объектов от лидара/радара 15, 16. Блок 2 распознавания состояния окружения включает в себя блок 21 обработки калибровки, который формирует данные калибровки для данных изображения и данных объекта, и блок 22 обработки распознавания объектов, который выполняет обработку распознавания объектов на основании данных калибровки.
[0019] Блок 21 обработки калибровки оценивает параметр для данных изображения с камер 11, 12, 13, 14 распознавания и параметр для данных объекта с лидара/радара 15, 16 и использует эти параметры для формирования и вывода данных изображения и данных калибровки данных объекта. Например, в случае данных изображения с камер 11, 12, 13, 14 распознавания блок 21 обработки калибровки использует параметры для выполнения коррекции и т.д. оптических осей и искажения объектива.
[0020] Блок 22 обработки распознавания объектов принимает в качестве входных данных данные калибровки от блока 21 обработки калибровки, выполняет обработку распознавания объектов на основании данных калибровки и выводит данные результата распознавания. Блок 22 обработки распознавания объектов, например, выполняет обработку путём сравнения данных изображения и данных объекта, и когда данные объекта подтверждают, что в положении возможного объекта, которое основано на данных изображения, присутствует объект, блок 22 обработки распознавания объектов распознает, что присутствует объект, и распознает, что представляет собой этот объект.
[0021] Блок 3 управления навигацией принимает в качестве входных данных информацию о местоположении транспортного средства-носителя от антенны 31 GNSS, объединяет GPS (глобальную систему определения местоположения), использующую спутниковую связь, с картографическими данными, включающими в себя информацию о дорогах, и формирует целевой маршрут к пункту назначения из текущего положения с использованием поиска маршрута. В дополнение к отображению сформированных целевых маршрутов на карте, блок 3 управления навигацией выводит информацию о целевом маршруте.
[0022] “GNSS” означает «глобальная спутниковая навигационная система», а “GPS” означает «глобальная система определения местоположения». Подробная конфигурация блока 3 управления навигацией будет описана ниже.
[0023] Блок 4 управления автономным движением принимает в качестве входных данных данные результата распознавания от блока 22 обработки распознавания объектов из блока 2 распознавания состояния окружения и информацию о целевом маршруте из блока 3 управления навигацией. Блок 4 управления автономным движением формирует целевые скорости транспортного средства, целевые величины ускорения и целевые величины замедления на основании входной информации. Блок 4 управления автономным движением получает значения команды управления движением с использованием целевой величины ускорения, которая была сформирована, и выводит результат этого получения в исполнительный механизм 51 привода. Блок 4 управления автономным движением получает значения команды управления тормозом с использованием целевой величины замедления, которая была сформирована, и выводит результат этого получения в исполнительный механизм 52 тормоза. Блок 4 управления автономным движением получает значения команды управления рулевым управлением, используя введенную в него информацию о целевом маршруте, и выводит результат этого получения в исполнительный механизм 53 рулевого управления.
[0024] Исполнительные механизмы 5 включают в себя исполнительный механизм 51 привода, исполнительный механизм 52 тормоза и исполнительный механизм 53 рулевого управления.
[0025] Исполнительный механизм 51 привода принимает в качестве входных данных значение команды управления движением от блока 4 управления автономным движением и управляет тяговым усилием от источника движущей силы. Другими словами, в случае транспортного средства с двигателем исполнительный механизм 51 привода является исполнительным механизмом двигателя. В случае гибридного транспортного средства исполнительный механизм 51 привода представляет собой исполнительный механизм двигателя и исполнительный механизм мотора. В случае электрического транспортного средства исполнительный механизм 51 привода представляет собой исполнительный механизм мотора.
[0026] Исполнительный механизм 52 тормоза принимает в качестве входных данных значение команды управления тормозом от блока 4 управления автономным движением и управляет тормозной силой тормозов. В качестве исполнительного механизма 52 тормоза используется гидравлический усилитель, электрический усилитель и т.д..
[0027] Исполнительный механизм 53 рулевого управления принимает в качестве входных данных значение команды управления рулевым управлением от блока 4 управления автономным движением и управляет углом поворота рулевого колеса. В качестве исполнительного механизма 53 угла поворота рулевого колеса используется мотор управления углом поворота рулевого колеса и т.д.
[0028] [Подробная конфигурация блока управления навигацией]
Подробная конфигурация блока 3 управления навигацией, который устанавливает пункт назначения, получает оптимальный целевой маршрут и отображает целевой маршрут для автономного движения, будет описана ниже с обращением к фиг.1.
[0029] Как показано на фиг.1, блок 3 управления навигацией содержит антенну 31 GNSS, блок 32 обработки информации о положении, блок 33 установки пункта назначения, блок 34 хранения картографических данных, блок 35 обработки поиска маршрута, корректор 36 целевого маршрута и устройство 37 отображения.
[0030] Блок 32 обработки информации о положении выполняет обработку для обнаружения широты и долготы положений остановки транспортного средства-носителя и положений движения транспортного средства-носителя на основании информации спутниковой связи, введенной от антенны 31 GNSS. Информация о положении транспортного средства-носителя из блока 32 обработки информации о положении выводится в блок 35 обработки поиска маршрута.
[0031] Пункт назначения для транспортного средства-носителя вводится в блок 33 установки пункта назначения и устанавливается в нём посредством, среди прочего, операции с сенсорной панелью на экране дисплея устройства 37 отображения со стороны водителя. Информация о пункте назначения из блока 33 установки пункта назначения выводится в блок 35 обработки поиска маршрута.
[0032] Блок 34 хранения картографических данных является блоком хранения так называемых цифровых картографических данных, в которых связаны между собой широта/долгота и картографическая информация. Картографические данные включают в себя информацию о дороге, которая была связана с соответствующими точками. Информация о дороге определяется узлами и участками, которые соединяют узлы друг с другом. Информация о дороге включает в себя информацию, которая определяет дороги в соответствии с положением/областью дороги, и информацию, указывающую тип каждой дороги, ширину каждой дороги и геометрию дороги. Положение перекрестков, направления приближения к перекресткам, тип перекрестка и другая информация, относящаяся к перекресткам, хранятся в информации о дороге вместе с соответствующей идентификационной информацией для каждого участка дороги. Тип дороги, ширина дороги, геометрия дороги, разрешено ли движение вперед, отношения приоритетности проезда, разрешен ли обгон (разрешен ли выезд в соседнюю полосу движения), ограничение скорости и другая информация, относящаяся к дорогам, также хранится в связи с соответствующей идентификационной информацией для каждого участка дороги в информации о дороге.
[0033] Блок 35 обработки поиска маршрута принимает в качестве входных данных информацию о положении транспортного средства-носителя из блока 32 обработки информации о положении, информацию о пункте назначения из блока 33 установки пункта назначения и информацию карты дорог (данные карты дорог) из блока 34 хранения картографических данных. Блок 35 обработки поиска маршрута формирует целевой маршрут путём выполнения вычисления стоимости маршрута и т.д. на основании информации карты дорог. Для формирования целевого маршрута могут быть использованы GPS и карта. В качестве альтернативы, вместо использования GPS и карты, когда присутствует движущееся впереди транспортное средство, в качестве целевого маршрута может использоваться траектория движения движущегося впереди транспортного средства. В таком случае, когда точность положения по GPS является низкой, использование этой траектории движения уменьшает величину бокового перемещения посредством корректора 36 целевого маршрута, описанного ниже, и поведение транспортного средства можно сделать более плавным.
[0034] Корректор 36 целевого маршрута принимает в качестве входных данных данные результата распознавания из блока 22 обработки распознавания объектов, целевой маршрут из блока 35 обработки поиска маршрута и информацию карты дорог из блока 34 хранения картографических данных. В дополнение к целевому маршруту корректор 36 целевого маршрута получает в качестве входных данных (левое и правое) расстояния в боковом направлении до белых линий разметки, (левое и правое) расстояния в боковом направлении до стационарных объектов, (левое и правое) расстояния в боковом направлении до бордюров, состояние использования водителем указателя поворота (сигнала поворота), условие смены полосы движения и информацию, такую как скорость транспортного средства. Корректор 36 целевого маршрута обнаруживает границы полосы движения для полосы движения по которой движется транспортное средство-носитель, на основании этой входной информации. Корректор 36 целевого маршрута сравнивает взаимное расположение между границами полосы движения, которые были обнаружены, и целевым маршрутом на карте, а также в ситуациях, когда целевой маршрут находится в пределах заданного расстояния от границы полосы движения, или в ситуациях, когда целевой маршрут находится на противоположной стороне границы полосы движения по отношению к транспортному средству-носителю, целевой маршрут корректируется с боковым перемещением в боковом направлении.
[0035] «Заданное расстояние» относится к расстоянию, на котором водитель будет испытывать чувство дискомфорта, когда транспортное средство-носитель приближается к границе полосы движения. Например, когда расстояние от центральной линии в направлении ширины транспортного средства для транспортного средства-носителя до границы полосы движения составляет приблизительно 2 м (когда расстояние от бока транспортного средства-носителя до границы полосы движения составляет приблизительно 1 м). В ситуациях, когда целевой маршрут находится на противоположной стороне границы полосы движения по отношению к транспортному средству-носителю, целевой маршрут корректируется с помощью бокового перемещения в боковом направлении независимо от расстояния до транспортного средства-носителя.
[0036] Устройство 37 отображения принимает в качестве входных данных информацию картографических данных из блока 34 хранения картографических данных и информацию целевого маршрута от корректора 36 целевого маршрута. Устройство 37 отображения отображает карту, дороги, целевой маршрут, положение транспортного средства-носителя и пункт назначения на экране дисплея. Другими словами, во время автономного движения устройство 37 отображения выводит информацию, визуально представляющую положение транспортного средства-носителя на карте, например, о том, где движется транспортное средство-носитель.
[Общая конфигурация корректора целевого маршрута]
На фиг.4 показан корректор 36 целевого маршрута блока 3 управления навигацией (контроллера) в первом варианте осуществления. Общая конфигурация корректора 36 целевого маршрута будет описана ниже с обращением к фиг.4.
[0038] Корректор 36 целевого маршрута корректирует навигационные ошибки, возникающие между положением транспортного средства-носителя и целевым маршрутом, когда положение транспортного средства-носителя, обнаруженное с использованием навигационной информации, накладывается на картографическую информацию во время автономного движения. Эта коррекция производится при боковом/поперечном движении целевого маршрута. Как показано на фиг.4, корректор 36 целевого маршрута включает в себя блок 361 объединения информации о границах дороги, блок 362 вычисления величины боковой коррекции, блок 363 бокового/поперечного движения, блок 364 различения геометрии дороги и блок 365 ограничения скорости.
[0039] Во время движения по прямой, блок 361 объединения информации о границах дороги принимает в качестве входных данных расстояния (слева и справа) в боковом направлении до белых линий разметки, расстояния (слева и справа) в боковом направлении до стационарных объектов, расстояния (слева и справа) в боковом направлении до бордюров, состояние использования водителем указателя поворота (сигнала поворота), условие смены полосы движения и информацию, такую как скорость транспортного средства. Во время движения по кривым вместо расстояний (слева и справа) в боковом направлении до белых линий разметки блок 361 объединения информации о границах дороги принимает в качестве входных данных боковые положения правой белой линии разметки с применением ограничителя скорости и боковые положения левой белой линии разметки с применением ограничителя скорости от блока 365 ограничения скорости и вычисляет расстояния (слева и справа) в боковом направлении до белых линий разметки. Блок 361 объединения информации о границах дороги обнаруживает границы полосы движения, по которой движется транспортное средство-носитель A, и выводит расстояния (слева и справа) в боковом направлении до границ полосы движения по отношению к транспортному средству-носителю A в блок 362 вычисления величины боковой коррекции.
[0040] Блок 362 вычисления величины боковой коррекции принимает в качестве входных данных целевой маршрут от блока 35 обработки поиска маршрута, расстояния (слева и справа) в боковом направлении до границ полосы движения от блока 361 объединения информации о границах дороги, состояние использования водителем указателя поворота, условия смены полосы движения и такую информацию, как скорость транспортного средства. Блок 362 вычисления величины боковой коррекции сравнивает взаимное расположение между границами полосы движения, которые были обнаружены, и целевым маршрутом на карте, и в ситуациях, когда целевой маршрут находится в пределах заданного расстояния от границы полосы движения, или в ситуациях, когда целевой маршрут находится с противоположной стороны от границы полосы движения по отношению к транспортному средству-носителю A, вычисляет величину боковой коррекции для целевого маршрута.
[0041] Блок 363 бокового/поперечного перемещения принимает в качестве входных данных целевой маршрут от блока 35 обработки поиска маршрута и величину боковой коррекции от блока 362 вычисления величины боковой коррекции. Как показано в выноске B в нижней правой части фиг.4, после вычисления величины боковой коррекции блок 363 бокового/поперечного перемещения перемещает целевой маршрут вбок в боковом направлении на величину боковой коррекции для коррекции целевого маршрута, и формируется новый целевой маршрут. При корректировке целевого маршрута с перемещением вбок степень совмещения между направлением движения транспортного средства-носителя A и новым целевым маршрутом может быть увеличена, если направление движения транспортного средства-носителя A и целевой маршрут отклоняются друг от друга.
[0042] Блок 364 различения геометрии дороги различает кривые на запланированном маршруте движения транспортного средства-носителя и направление кривых на основании информации о положении транспортного средства-носителя на карте (информации о геометрии дороги) и GPS. При достижении точки, в которой кривизна изгиба кривой начинает изменяться, блок 364 различения геометрии дороги выводит информацию о кривой в блок 365 ограничения скорости только от достижения точки, в которой начинает изменяться кривизна, до тех пор, пока не пройдёт заданное количество времени, необходимое для выхода из кривой. Заданное количество времени, необходимое для выхода транспортного средства-носителя из кривой, определяется в соответствии с кривизной и длиной кривой и оцененной скорости транспортного средства-носителя в кривой.
[0043] Блок 365 ограничения скорости принимает в качестве входных данных информацию кривой от блока 364 различения геометрии дороги, боковые положения правой белой линии разметки, обнаруженные правой камерой 13 распознавания, и боковые положения левой белой линии разметки, обнаруженные левой камерой 14 распознавания. При вводе информации о кривой при прохождении кривой блок 365 ограничения скорости устанавливает для бокового положения правой белой линии разметки и бокового положения левой белой линии разметки результат обнаружения границы полосы движения с внутренней стороны изгиба в значение, для которого изменение в боковом направлении с приближением к транспортному средству-носителю, ограничено. Другими словами, допустимая скорость изменения, разрешенная для боковой скорости (скорость изменения) в направлении, в котором результат обнаружения границ полосы движения приближается к транспортному средству-носителю с внутренней стороны изгиба, становится меньше допустимой скорости изменения, разрешенной для боковой скорости (скорость изменения) результата обнаружения границ полосы движения с внешней стороны изгиба. Затем блок 365 ограничения скорости выводит в блок 361 объединения информации о границах дороги боковое положение правой белой линии разметки с применением ограничителем скорости и боковое положение левой белой линии с применением ограничителя скорости.
[0044] [Подробная конфигурация блока ограничения скорости]
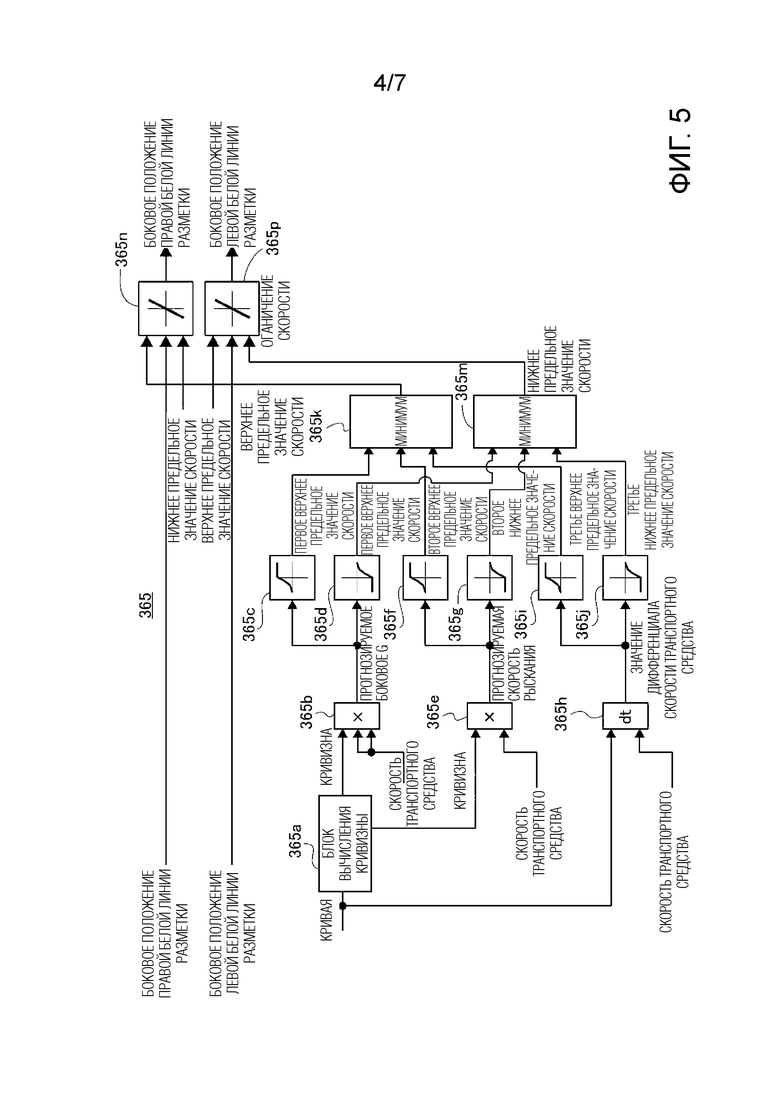
На фиг.5 показана подробная конфигурация блока 365 ограничения скорости в корректоре 36 целевого маршрута. Подробная конфигурация блока 365 ограничения скорости будет описана ниже с обращением к фиг.5.
[0045] Как показано на фиг.5, блок 365 ограничения скорости включает в себя блок 365а вычисления кривизны, блок 365b получения прогнозируемого бокового G, блок 365c определения первого верхнего предельного значения скорости и блок 365d определения первого нижнего предельного значения скорости. Блок 365 ограничения скорости также включает в себя блок 365e определения прогнозируемой скорости рыскания, блок 365f определения второго верхнего предельного значения скорости, блок 365g определения второго нижнего предельного значения скорости, блок 365h получения дифференциала скорости транспортного средства, блок 365i определения третьего верхнего предельного значения скорости и блок 365j определения третьего нижнего предельного значения скорости. Кроме того, блок 365 ограничения скорости включает в себя блок 365k выбора верхнего предельного значения скорости, блок 365m выбора нижнего предельного значения скорости, правый ограничитель 365n скорости и левый ограничитель 365p скорости.
[0046] Блок 365a вычисления кривизны вычисляет кривизну кривой, используя геометрию дороги, которая была получена с использованием карты и GPS.
[0047] Блок 365b получения прогнозируемого бокового G принимает в качестве входных данных кривизну и скорость транспортного средства и выводит прогнозируемое боковое G, используя следующие уравнения.
[0048] Геометрия кривизны дороги выражается как y=1/2ρD2. Здесь ρ представляет кривизну, а D представляет расстояние в направлении движения. D=Vt, когда скорость транспортного средства определена как V, что дает y=1/2ρV2t2. Таким образом, величина бокового перемещения y в боковом направлении к белой линии разметки, как видно для движущегося вперед транспортного средства-носителя, в течение интервала t=τ, может быть записана как y=1/2ρV2τ2. В этом уравнении для величины бокового перемещения к белой линии разметки ρV2 представляет собой прогнозируемое боковое G. Прогнозируемое боковое G получается с использованием уравнения прогнозируемого бокового G=ρV2.
[0049] Блок 365c определения первого верхнего предельного значения скорости включает в себя таблицу поиска, в которой прогнозируемое боковое G определяет поперечную ось. Блок 365c определения первого верхнего предельного значения скорости определяет первое верхнее предельное значение скорости с использованием прогнозируемого бокового G и атрибутов таблицы. Первое верхнее предельное значение скорости задано равным значению, которое в большей степени снижает скорость, с которой правая белая линия разметки перемещается влево с увеличением прогнозируемого бокового G в правой кривой.
[0050] Блок 365d определения первого нижнего предельного значения скорости включает в себя таблицу поиска, в которой прогнозируемое боковое G определяет поперечную ось. Блок 365d определения первого нижнего предельного значения скорости определяет первое нижнее предельное значение скорости с использованием прогнозируемого бокового G и атрибутов таблицы. Первое нижнее предельное значение скорости устанавливается в значение, которое в большей степени снижает скорость, с которой левая белая линия разметки перемещается вправо с увеличением прогнозируемого бокового G в левой кривой.
[0051] Блок 365e получения прогнозируемой скорости рыскания принимает в качестве входных данных кривизну и скорость транспортного средства и выводит прогнозируемую скорость рыскания с использованием следующих уравнений.
[0052] Как описано выше, величина бокового перемещения y для белой линии разметки может быть записана как y=1/2ρV2τ2. В этом уравнении для величины бокового перемещения y для белой линии разметки ρV представляет прогнозируемую скорость рыскания. Прогнозируемая скорость рыскания определяется с использованием уравнения прогнозируемой скорости рыскания=ρV.
[0053] Блок 365f определения второго верхнего предельного значения скорости включает в себя таблицу поиска, в которой прогнозируемая скорость рыскания определяет поперечную ось. Блок 365f определения второго верхнего предельного значения скорости определяет второе верхнее предельное значение скорости с использованием прогнозируемой скорости рыскания и атрибутов таблицы. Второе верхнее предельное значение скорости установлено в значение, которое в большей степени снижает скорость, с которой правая белая линия разметки перемещается влево с увеличением прогнозируемой скорости рыскания в правой кривой.
[0054] Блок 365g определения второго нижнего предельного значения скорости включает в себя таблицу поиска, в которой прогнозируемая скорость рыскания определяет поперечную ось. Блок 365g определения второго нижнего предельного значения скорости определяет второе нижнее предельное значение скорости с использованием прогнозируемой скорости рыскания и атрибутов таблицы. Второе нижнее предельное значение скорости задано равным значению, которое в большей степени снижает скорость, с которой левая белая линия разметки перемещается вправо с увеличением прогнозируемой скорости рыскания в левой кривой.
[0055] Блок 365h получения дифференциала скорости транспортного средства принимает в качестве входных данных информацию о кривой и скорость транспортного средства и выполняет процесс дифференцирования по времени для скорости V транспортного средства для получения значений дифференциала скорости транспортного средства, которые выражают величину изменения скорости V транспортного средства за единицу времени.
[0056] Блок 365i определения третьего верхнего предельного значения скорости включает в себя таблицу поиска, в которой значения дифференциала скорости транспортного средства определяют поперечную ось. Блок 365i определения третьего верхнего предельного значения скорости определяет третье верхнее предельное значение скорости с использованием значения дифференциала скорости транспортного средства и атрибутов таблицы. Третье верхнее предельное значение скорости установлено в значение, которое в большей степени снижает скорость, с которой правая белая линия разметки перемещается влево с увеличением значения дифференциала скорости транспортного средства (скорости замедления) в правой кривой.
[0057] Блок 365j определения третьего нижнего предельного значения скорости включает в себя таблицу поиска, в которой значения дифференциала скорости транспортного средства определяют поперечную ось. Блок 365j определения третьего нижнего предельного значения скорости определяет третье нижнее предельное значение скорости с использованием значения дифференциала скорости транспортного средства и атрибутов таблицы. Третье нижнее предельное значение скорости установлено равным значению, которое в большей степени снижает скорость, с которой левая белая линия разметки перемещается вправо с увеличением значения дифференциала скорости транспортного средства (скорости замедления) в левой кривой.
[0058] Блок 365k выбора верхнего предельного значения скорости принимает в качестве входных данных первое верхнее предельное значение скорости, второе верхнее предельное значение скорости и третье верхнее предельное значение скорости и выбирает то значение, которое имеет наименьшее абсолютное значение, в качестве верхнего предельного значения скорости.
[0059] Блок 365m выбора нижнего предельного значения скорости принимает в качестве входных данных первое нижнее предельное значение скорости, второе нижнее предельное значение скорости и третье нижнее предельное значение скорости и выбирает то значение, которое имеет наименьшее абсолютное значение, в качестве нижнего предельного значения скорости.
[0060] Правый ограничитель 365n скорости принимает в качестве входных данных боковое положение правой белой линии разметки, обнаруженное правой камерой 13 распознавания, верхнее предельное значение скорости из блока 365k выбора верхнего предельного значения скорости и нижнее предельное значение скорости, которое установлено заранее. Правый ограничитель 365n скорости ограничивает скорость изменения (боковую скорость) бокового положения правой белой линии разметки с использованием верхнего предельного значения скорости и нижнего предельного значения скорости для получения бокового положения правой белой линии разметки с применением ограничителя скорости.
[0061] Левый ограничитель 365p скорости принимает в качестве входных данных боковое положение левой белой линии разметки, обнаруженное левой камерой 14 распознавания, нижнее предельное значение скорости из блока 365m выбора нижнего предельного значения скорости и верхнее предельное значение скорости, которое установлено заранее. Левый ограничитель 365p скорости ограничивает скорость изменения (боковую скорость) бокового положения левой белой линии разметки с использованием верхнего предельного значения скорости и нижнего предельного значения скорости для получения бокового положения левой белой линии разметки с применением ограничителя скорости.
[0062] Далее будут описаны операции. Работа первого варианта осуществления будет описана под заголовками «Операция для управления движением в кривой в сравнительном примере» и «Операция для управления движением в кривой в первом варианте осуществления».
[0063] [Операция для управления движением в кривой в сравнительном примере]
Фиг.6 иллюстрирует результат обнаружения границ полосы движения с внутренней стороны изгиба и результат обнаружения границ полосы движения с внешней стороны изгиба в сравнительном примере при движении в кривой. Проблема сравнительного примера будет описана ниже с обращением к фиг.6. В сравнительном примере значения обнаружения левой и правой границ полосы движения при движении в кривой непосредственно используются в качестве результатов обнаружения границ полосы движения с внутренней стороны изгиба и результатов обнаружения границ полосы движения с внешней стороны изгиба.
[0064] При движении по кривой, в ситуациях, когда обнаружение левой и правой белых линий разметки выполняется с использованием камер и т.д., при достижении местоположения, где изменяется кривизна дороги (участок C изменения кривизны на Фиг.6), камеры не могут следовать за изменениями боковых положений левой и правой белых линий разметки. Соответственно, как показано пунктирной линией в пределах границ, указанных стрелкой D на Фиг. 6, результаты обнаружения камер имеют тенденцию к отставанию от фактических левой и правой белых линий разметки.
[0065] Если имеется задержка в обнаружении белых линий разметки с внутренней стороны изгиба после прохождения участка C изменения кривизны, результаты обнаружения белых линий разметки камерами будут принимать значения в направлении приближения к транспортному средству-носителю A. Если имеется задержка в обнаружении белых линий разметки с внешней стороны изгиба после прохождения участка C изменения кривизны, результаты обнаружения камер будут принимать значения в направлении, удаляющемся от транспортного средства-носителя A.
[0066] Фиг.7 иллюстрирует операцию управления движением при движении в кривой в сравнительном примере. Операция для управления движением в кривой в сравнительном примере будет описана ниже с обращением к Фиг.7.
[0067] Как описано выше, если имеется задержка в обнаружении белых линий разметки после прохождения участка C изменения кривизны, результаты обнаружения белых линий камерами будут принимать значения в направлении приближения к транспортному средству-носителю A с внутренней стороны изгиба и будут принимать значения в направлении, удаляющемся от транспортного средства-носителя A с внешней стороны изгиба. Таким образом, кривизна кривой, распознанная с использованием результатов обнаружения белых линий разметки камерами, будет больше (радиус кривизны будет меньше), чем кривизна кривой, основанная на фактических левой и правой белых линиях разметки, и будет отклоняться к внешней стороне изгиба.
[0068] Из-за этого целевой маршрут TL, созданный с использованием карты, будет корректироваться с использованием результатов обнаружения камерами белых линий разметки, и система попытается выполнять движение в пределах полосы движения, используя управление с отслеживанием линии, выполняемое в отношении целевого маршрута TL. В таком случае, поскольку для скорректированного целевого маршрута TL’ коррекции действуют в направлении к внешней стороне кривой, как показано в рамках границы, обозначенной стрелкой E на Фиг. 7, целевой маршрут TL’ смещается к внешней белой линии разметки в кривой. В результате, если транспортное средство-носитель A будет перемещаться по скорректированному целевому маршруту TL’, транспортное средство-носитель A будет двигаться со смещением по направлению к внешней стороне изгиба на участке кривой, где изменяется кривизна.
[0069] Аналогичная операция, при которой транспортное средство-носитель движется со смещением в направлении к внешней стороне изгиба на участке кривой, где изменяется кривизна, происходит, когда управление, посредством которого транспортное средство-носитель движется с сохранением положения, центрированного между левой и правой белыми линиями разметки, выполняется на основании результатов обнаружения левой и правой белой линий разметки камерами без создания целевого маршрута.
[0070] [Операция для управления движением в кривой в первом варианте осуществления]
Фиг.8 иллюстрирует операцию для управления движением при движении в кривой в первом варианте осуществления. Операция для управления движением в кривой в первом варианте осуществления будет описана ниже с обращением к фиг.5 и 8.
[0071] Настоящее изобретение сосредоточено на проблеме в приведенном выше сравнительном примере. В первом варианте осуществления при движении в кривой допустимая скорость изменения, разрешенная для боковой скорости в направлении, в котором результат обнаружения границ полосы движения приближается к транспортному средству-носителю с внутренней стороны изгиба, делается меньшей, чем допустимая скорости изменения, разрешённая для изменения боковой скорости результата обнаружения границ полосы движения с внешней стороны изгиба.
[0072] Таким образом, блок 365a вычисления кривизны вычисляет кривизну кривой с использованием геометрии дороги, которая была получена с использованием карты и GPS. Блок 365b получения прогнозируемого бокового G принимает в качестве входных данных кривизну и скорость транспортного средства и получает прогнозируемое боковое G с использованием уравнения прогнозируемого бокового G=ρV2. Затем блок 365c определения первого верхнего предельного значения скорости определяет первое верхнее предельное значение скорости с использованием прогнозируемого бокового G и атрибутов таблицы. Определенное первое верхнее предельное значение скорости установлено равным значению, которое в большей степени снижает скорость, с которой правая белая линия разметки с внутренней стороны изгиба перемещается влево с увеличением прогнозируемого бокового G в правой кривой. Блок 365d определения первого нижнего предельного значения скорости также определяет первое нижнее предельное значение скорости с использованием прогнозируемого бокового G и атрибутов таблицы. Определенное первое нижнее предельное значение скорости установлено равным значению, которое в большей степени снижает скорость, с которой левая белая линия разметки с внутренней стороны изгиба перемещается вправо с увеличением прогнозируемого бокового G в левой кривой.
[0073] Блок 365e получения прогнозируемой скорости рыскания принимает в качестве входных данных кривизну и скорость транспортного средства и получает прогнозируемую скорость рыскания с использованием уравнения прогнозируемой скорости рыскания=ρV. Затем блок 365f определения второго верхнего предельного значения скорости определяет второе верхнее предельное значение скорости с использованием прогнозируемой скорости рыскания и атрибутов таблицы. Определенное второе верхнее предельное значение скорости установлено равным значению, которое в большей степени снижает скорость, с которой правая белая линия разметки с внутренней стороны изгиба перемещается влево с увеличением прогнозируемой скорости рыскания в правой кривой. Блок 365g определения второго нижнего предельного значения скорости также определяет второе нижнее предельное значение скорости с использованием прогнозируемой скорости рыскания и атрибутов таблицы. Определенное второе нижнее предельное значение скорости установлено равным значению, которое в большей степени снижает скорость, с которой левая белая линия разметки с внутренней стороны изгиба перемещается вправо с увеличением прогнозируемой скорости рыскания в левой кривой.
[0074] Блок 365h получения дифференциала скорости транспортного средства принимает в качестве входных данных информацию о кривой и скорость транспортного средства и выполняет процесс дифференцирования по времени для скорости V транспортного средства для получения значения дифференциала скорости транспортного средства, который выражает величину изменения скорости V транспортного средства за единицу времени. Затем блок 365i определения третьего верхнего предельного значения скорости определяет третье верхнее предельное значение скорости с использованием значения дифференциала скорости транспортного средства и атрибутов таблицы. Определенное третье верхнее предельное значение скорости установлено равным значению, которое в большей степени снижает скорость, с которой правая белая линия разметки с внутренней стороны изгиба перемещается влево с увеличением значения дифференциала скорости транспортного средства (скорость замедления) в правой кривой. Блок 365j определения третьего нижнего предельного значения скорости также определяет третье нижнее предельное значение скорости с использованием значения дифференциала скорости транспортного средства и атрибутов таблицы. Определенное третье нижнее предельное значение скорости установлено равным значению, которое в большей степени снижает скорость, с которой правая белая линия разметки с внутренней стороны изгиба перемещается вправо с увеличением значения дифференциала скорости транспортного средства (скорость замедления) в левой кривой.
[0075] Блок 365k выбора верхнего предельного значения скорости принимает в качестве входных данных первое верхнее предельное значение скорости, второе верхнее предельное значение скорости и третье верхнее предельное значение скорости, и из этих трех значений выбирает то значение, которое имеет наименьшее абсолютное значение, в качестве верхнего предела скорости. Блок 365m выбора нижнего предельного значения скорости принимает в качестве входных данных первое нижнее предельное значение скорости, второе нижнее предельное значение скорости и третье нижнее предельное значение скорости, и из этих трех значений выбирает то значение, которое имеет наименьшее абсолютное значение, в качестве нижнего предельного значения скорости.
[0076] Затем правый ограничитель 365n скорости принимает в качестве входных данных боковое положение правой белой линии разметки, обнаруженное правой камерой 13 распознавания, верхнее предельное значение скорости из блока 365k выбора верхнего предельного значения скорости и нижнее предельное значение скорости, которое установлено заранее. Правый ограничитель 365n скорости ограничивает скорость изменения (боковую скорость) бокового положения правой белой линии разметки с использованием верхнего предельного значения скорости и нижнего предельного значения скорости для получения бокового положения правой белой линии разметки с применением ограничителя скорости.
[0077] Аналогичным образом, левый ограничитель 365p скорости принимает в качестве входных данных боковое положение левой белой линии разметки, обнаруженное левой камерой 14 распознавания, нижнее предельное значение скорости из блока 365m выбора нижнего предельного значения скорости и верхнее предельное значение скорости, которое установлено заранее. Левый ограничитель 365p скорости ограничивает скорость изменения (боковую скорость) бокового положения левой белой линии разметки с использованием верхнего предельного значения скорости и нижнего предельного значения скорости для получения бокового положения левой белой линии разметки с применением ограничителя скорости.
[0078] Следовательно, при движении по правой кривой, даже если имеется задержка в обнаружении белой линии разметки после прохождения участка С изменения кривизны, боковые положения правой белой линии разметки с применением ограничителя скорости с внутренней стороны изгиба являются положениями, для которых скорость перемещения влево снижена. Кроме того, при движении по левой кривой боковые положения левой белой линии разметки с применением ограничителя скорости с внутренней стороны изгиба являются положениями, для которых скорость перемещения вправо снижена. Таким образом, кривизна кривой, распознаваемая с использованием боковых положений правой белой линии разметки и боковых положений левой белой линии разметки, приближается к кривизне кривой на основании фактических левой и правой белых линий разметки.
[0079] Вследствие этого целевой маршрут TL, созданный с использованием карты, будет скорректирован с использованием боковых положений правой белой линии разметки с применением ограничителя скорости и боковых положений левой белой линии разметки и система попытается осуществить движение в пределах полосы движения с использованием управления с отслеживанием линии, выполняемым в отношении целевого маршрута TL. В таком случае, поскольку для скорректированного целевого маршрута TL’’ предотвращается действие коррекции в направлении к внешней стороне кривой, как показано в виде границы на стрелке F на Фиг. 8, целевой маршрут TL’’ по существу следует центральной линии кривой. В результате, даже если транспортное средство-носитель A побуждают двигаться по скорректированному целевому маршруту TL’’, транспортное средство-носитель A может двигаться без смещения к внешней стороне изгиба на участке кривой, где изменяется кривизна.
[0080] Далее будут описаны эффекты настоящего изобретения.
Эффекты, приведенные ниже в качестве примера, достигаются посредством способа и устройства управления движением автономного транспортного средства по первому варианту осуществления.
[0081] (1) Предусмотрен контроллер (блок 3 управления навигацией), который обнаруживает границы левой и правой полос движения и управляет движением транспортного средства-носителя на основании результата обнаружения границ полосы движения. В способе управления движением транспортного средства с помощью при вождении (автономного транспортного средства) кривая и направление кривой различаются на основании информации о геометрии дороги. При движении в кривой результат обнаружения границ полосы движения с внутренней стороны изгиба устанавливается равным значению, для которого ограничено изменение в боковом направлении с приближением к транспортному средству-носителю (Фиг. 8). Соответственно, может быть обеспечен способ управления движением транспортного средства с помощью при вождении (автономного транспортного средства), при помощи которого движение не отклоняется к внешней стороне изгиба на участке кривой, где изменяется кривизна.
[0082] (2) При движении по кривой допустимая скорость изменения, разрешённая для боковой скорости в направлении, в котором результат обнаружения границ полосы движения приближается к транспортному средству-носителю с внутренней стороны изгиба, делается меньше допустимой скорости изменения, разрешённой для боковой скорости для результата обнаружения границ полосы движения с внешней стороны изгиба (Фиг. 5). Соответственно, в дополнение к эффекту (1), за счёт уменьшения скорости изменения (боковой скорости) бокового положения, может быть предотвращено приближение результата обнаружения границ полосы движения к транспортному средству-носителю с внутренней стороны изгиба. В ситуациях, когда, как и в первом варианте осуществления, формирование целевого маршрута и результаты обнаружения границ полосы движения используются в сочетании друг с другом, поскольку результаты обнаружения границ полосы движения не подвержены влиянию изменений скорости изменения, транспортное средство-носитель может двигаться в центре полосы движения за счёт боковой коррекции целевого маршрута без потери функциональности для коррекции целевого маршрута с боковым/поперечным движением.
[0083] (3) При движении по кривой результат обнаружения границ полосы движения с внутренней стороны изгиба устанавливается в значение, для которого изменение в боковом направлении с приближением к транспортному средству-носителю ограничено от точки, в которой начинается изменение кривизны изгиба, до истечения заданного промежутка времени (Фиг. 4). Соответственно, в дополнение к эффекту (1) или (2), в ситуациях движения по прямой, кроме ситуаций движения по кривой, транспортное средство-носитель может двигаться в центре полосы движения. То есть за счёт ограничения задержки результата обнаружения границ полосы движения с внутренней стороны изгиба только очевидными ситуациями движения по кривой, результаты обнаружения левой и правой границ полосы движения могут непосредственно использоваться в других ситуациях движения.
[0084] (4) Кривизна кривой вычисляется с использованием геометрии дороги, прогнозируемая величина бокового ускорения (прогнозируемое боковое G) вычисляется с использованием кривизны и скорости транспортного средства, и первое верхнее предельное значение скорости и первое нижнее предельное значение скорости значения изменяются в соответствии с прогнозируемой величиной бокового ускорения (Фиг. 5). Соответственно, в дополнение к эффекту (2) или (3), за счёт изменения верхнего и нижнего пределов ограничения скорости в соответствии с прогнозируемой величиной бокового ускорения (прогнозируемым боковым G) при движении по кривой поведение транспортного средства для транспортного средства-носителя может быть сведено к минимуму. То есть существует взаимосвязь, в соответствии с которой влияние, обусловленное задержкой датчиков, увеличивается с увеличением величины бокового перемещения y результата обнаружения границ полосы движения. Величина бокового перемещения y равна ρV2τ2, а прогнозируемое боковое G равно ρV2. Таким образом, если результат обнаружения границ полосы движения с внутренней стороны изгиба в большей степени ограничивается с увеличением значения прогнозируемого бокового G, величина бокового перемещения y сохраняется минимальной.
[0085] (5) Кривизна кривой вычисляется с использованием геометрии дороги, прогнозируемая скорость рыскания вычисляется с использованием кривизны и скорости транспортного средства, а второе верхнее предельное значение скорости и второе нижнее предельное значение скорости изменяются в соответствии с прогнозируемой скоростью рыскания.
Абсолютные значения, соответственно, сравниваются со значениями первого верхнего предельного значения скорости и первого нижнего предельного значения скорости, определяемыми на основании прогнозируемой величины бокового ускорения, и та из них, которая имеет меньшее абсолютное значение, соответственно используется в качестве верхнего предельного значения скорости и нижнего предельного значения скорости (Фиг. 5). Соответственно, помимо эффекта (4), в ситуациях, когда обнаружение границ полосы движения выполняется с учетом скорости рыскания транспортного средства-носителя, если результат обнаружения границ полосы движения с внутренней стороны изгиба ограничен с учётом прогнозируемой скорости рыскания в дополнение к прогнозируемому боковому G, при движении по кривой поведение транспортного средства для транспортного средства-носителя может быть сведено к минимуму. То есть существует взаимосвязь, в соответствии с которой ошибка обнаружения границ полосы движения увеличивается с увеличением изменения скорости рыскания, даже когда боковое G неизменно.
[0086] (6) Вычисляется значение дифференциала скорости транспортного средства, которое выражает изменение скорости транспортного средства во времени при движении по кривой, и третье верхнее предельное значение скорости и третье нижнее предельное значение скорости изменяются в соответствии со значением дифференциала скорости транспортного средства. Абсолютные значения, соответственно, сравниваются со значениями первого верхнего предельного значения скорости и первого нижнего предельного значения скорости, определенными на основании прогнозируемой величины бокового ускорения, и то из них, которое имеет меньшее абсолютное значение, соответственно используется в качестве верхнего предельного значения скорости и нижнего предельного значения скорости (Фиг. 5). Соответственно, помимо эффекта (4), в ситуациях, когда обнаружение границ полосы движения выполняется с учетом скорости рыскания транспортного средства-носителя, если результат обнаружения границ полосы движения с внутренней стороны изгиба ограничен с учетом значения дифференциала скорости транспортного средства в дополнение к прогнозируемому боковому G при движении по кривой, поведение транспортного средства для транспортного средства-носителя может быть сведено к минимуму. То есть, поскольку произведение кривизны и скорости транспортного средства равно скорости рыскания, изменение скорости транспортного средства (значение дифференциала скорости транспортного средства) становится изменением скорости рыскания.
[0087] (7) Сравниваются взаимные расположения между результатами обнаружения границ полосы движения и целевым маршрутом, сформированным способом, отличным от обнаружения левой и правой границ полосы движения, и в ситуациях, когда целевой маршрут находится в пределах заданного расстояния от границ полосы движения, или в ситуациях, когда целевой маршрут находится с противоположной стороны от границ полосы движения по отношению к транспортному средству-носителю, целевой маршрут корректируется посредством поперечного перемещения в боковом направлении (Фиг. 4). Соответственно, помимо эффектов (1) - (6), за счёт коррекции целевого маршрута, в том числе в кривых, посредством бокового перемещения вместо коррекции собственного положения транспортного средства-носителя, как описано выше, можно выбрать между приоритетностью плавности или приоритетностью отсутствия отклонения, в зависимости от ситуации, и может быть обеспечено поведение транспортного средства, при котором можно чувствовать себя более непринужденно.
[0088] (8) Предусмотрен контроллер (блок 3 управления навигацией), который обнаруживает левую и правую границы полосы движения и управляет движением транспортного средства-носителя на основании результата обнаружения границ полосы движения. В устройстве для управления движением транспортного средства с помощью при вождении (автономного транспортного средства) контроллер (блок 3 управления навигацией) включает в себя блок 364 различения геометрии дороги и блок подавления изменения результата обнаружения (блок 365 ограничения скорости). Блок 364 различения геометрии дороги различает кривую и направление кривой на основании информации о геометрии дороги. При движении по кривой блок подавления изменений результата обнаружения (блок 365 ограничения скорости) устанавливает результат обнаружения границ полосы движения с внутренней стороны изгиба равным значению, для которого ограничено изменение в боковом направлении с приближением к транспортному средству-носителю (Фиг. 4). Соответственно, может быть предусмотрено устройство управления движением транспортного средства с помощью при вождении (автономного транспортного средства), посредством которого движение не отклоняется к внешней стороне изгиба на участке кривой, где изменяется кривизна.
[0089] Выше были описаны способ и устройство управления движением транспортного средства с помощью при вождении согласно настоящему изобретению были описаны с обращением к первому варианту осуществления. Однако их конкретная конфигурация не ограничена конфигурацией по первому варианту осуществления, и возможны изменения конструкции, дополнения и т.п. без отклонения от сущности изобретения, изложенной в прилагаемой формуле изобретения.
[0090] В первом варианте осуществления был представлен пример, в котором формирование целевого маршрута и результаты обнаружения границ полосы движения используются в сочетании друг с другом. Однако настоящее изобретение может быть применено с использованием только результатов обнаружения границ полосы движения, например выполняется управление, при котором транспортное средство-носитель движется, сохраняя при этом положение, центрированное между левой и правой белыми линиями разметки, на основании результатов обнаружения левой и правой белой линии разметки камерами.
[0091] В первом варианте осуществления был представлен пример, в котором при движении по кривой, когда результат обнаружения границ полосы движения с внутренней стороны изгиба устанавливается в значение, для которого ограничено изменение в боковом направлении с приближением к транспортному средству-носителю., ограничение скорости усилено в отношении результата обнаружения границ полосы движения с внутренней стороны изгиба, и ограничение скорости ослаблено в отношении результата обнаружения границ полосы движения с внешней стороны изгиба. Это связано с тем, что для движения без смещения к внешней стороне изгиба на участке кривой, где изменяется кривизна, ограничение результатов обнаружения границ полосы движения с внутренней стороны изгиба более эффективно, чем ограничение результатов обнаружения границ полосы движения с внешней стороны изгиба, и поскольку ширина маршрута движения не уменьшается. Однако может быть принята конфигурация, в которой результат обнаружения границ полосы движения с внутренней стороны изгиба сохраняется при движении по кривой. Кроме того, может быть принята конфигурация, в которой результаты обнаружения границ полосы движения с внутренней стороны изгиба и с внешней стороны изгиба сохраняются при движении по кривой.
[0092] В первом варианте осуществления был представлен пример, в котором блок 3 управления навигацией используется в качестве контроллера, который формирует целевой маршрут к пункту назначения из текущего положения транспортного средства-носителя. Однако в качестве контроллера, который формирует целевой маршрут к пункту назначения из текущего положения транспортного средства-носителя может использоваться блок управления автономным движением. Функциональность формирования целевого маршрута также может быть разделена на две части, причем часть этой функциональности отнесена к блоку управления навигацией, а остальная часть отнесена к блоку управления автономным движением.
[0093] В первом варианте осуществления был представлен пример, в котором способ и устройство управления движением согласно настоящему изобретению применяются в автономном транспортном средстве, в котором управление рулевым управлением/приводом/торможением осуществляется автоматически в соответствии с выбором режима автономного управления. Тем не менее, способ и устройство управления движением в соответствии с настоящим изобретением могут быть применены в любом транспортном средстве с помощью при вождении, которое помогает водителю в любой части операции рулевого управления/операции привода/операции торможения. Вкратце, способ и устройство управления движением по настоящему изобретению могут быть применены в любом транспортном средстве, которое помогает водителю при вождении путем исправления навигационной ошибки.
Изобретение относится к способу и устройству управления движением транспортного средства с помощью при вождении. Способ управления движением транспортного средства с помощью при вождении, содержащим контроллер, который обнаруживает левую и правую границы полосы движения и который управляет движением транспортного средства-носителя на основании результата обнаружения границ полосы движения. Способ содержит этапы, на которых различают кривую и направление кривой на основании информации о геометрии дороги и устанавливают результат обнаружения границ полосы движения с внутренней стороны изгиба в значение, для которого изменение в боковом направлении с приближением к транспортному средству-носителю ограничено при движении по кривой. Достигается повышение безопасности управления транспортным средством. 2 н. и 6 з.п. ф-лы, 8 ил. 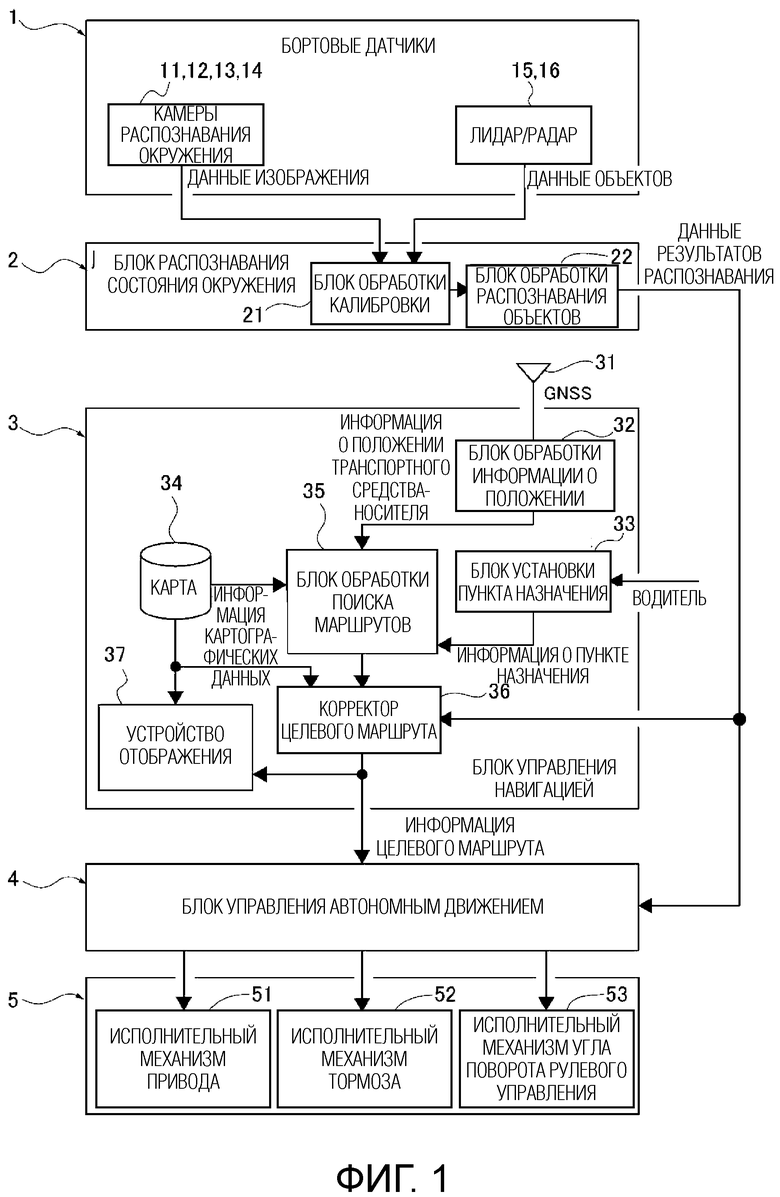
1. Способ управления движением транспортного средства с помощью при вождении, содержащим контроллер, который обнаруживает левую и правую границы полосы движения и который управляет движением транспортного средства-носителя на основании результата обнаружения границ полосы движения, причем способ содержит этапы, на которых:
различают кривую и направление кривой на основании информации о геометрии дороги; и
устанавливают результат обнаружения границ полосы движения с внутренней стороны изгиба в значение, для которого изменение в боковом направлении с приближением к транспортному средству-носителю ограничено при движении по кривой.
2. Способ управления движением транспортного средства с помощью при вождении по п.1, в котором
при движении по кривой допустимая скорость изменения, разрешенная для боковой скорости в направлении, в котором результат обнаружения границ полосы движения приближается к транспортному средству-носителю с внутренней стороны изгиба, делается меньшей, чем допустимая скорость изменения, разрешенная для боковой скорости результата обнаружения границ полосы движения с внешней стороны изгиба.
3. Способ управления движением транспортного средства с помощью при вождении по п.1 или 2, в котором
при прохождении по кривой результат обнаружения границ полосы движения с внутренней стороны изгиба устанавливается в значение, для которого изменение в боковом направлении с приближением к транспортному средству-носителю ограничено от точки, в которой начинает изменяться кривизна изгиба, до истечения заданного промежутка времени.
4. Способ управления движением транспортного средства с помощью при вождении по п.2 или 3, дополнительно содержащий этапы, на которых
вычисляют кривизну кривой с использованием геометрии дороги, вычисляют прогнозируемую величину бокового ускорения с использованием кривизны и скорости транспортного средства, и изменяют первое верхнее предельное значение скорости и первое нижнее предельное значение скорости в соответствии с прогнозируемой величиной бокового ускорения.
5. Способ управления движением транспортного средства с помощью при вождении по п.4, дополнительно содержащий этапы, на которых
вычисление кривизны кривой с использованием геометрии дороги, вычисление прогнозируемой скорости рыскания с использованием кривизны и скорости транспортного средства используют при изменении второго верхнего предельного значения скорости и второго нижнего предельного значения скорости в соответствии с прогнозируемой скоростью рыскания; и
сравнивают абсолютные значения, соответственно, со значениями первого верхнего предельного значения скорости и первого нижнего предельного значения скорости, определенными на основании прогнозируемой величины бокового ускорения, и то из них, которое имеет меньшее абсолютное значение, соответственно, используется в качестве верхнего предельного значения скорости и нижнего предельного значения скорости.
6. Способ управления движением транспортного средства с помощью при вождении по п.4, дополнительно содержащий этапы, на которых
вычисляют значение дифференциала скорости транспортного средства, которое выражает изменение скорости транспортного средства во времени при движении по кривой, и изменяют третье верхнее предельное значение скорости и третье нижнее предельное значение скорости в соответствии со значением дифференциала скорости транспортного средства; и
сравнивают абсолютные значения, соответственно, со значениями первого верхнего предельного значения скорости и первого нижнего предельного значения скорости, определенными на основании прогнозируемой величины бокового ускорения, и то из них, которое имеет меньшее абсолютное значение, соответственно, используется в качестве верхнего предельного значения скорости и нижнего предельного значения скорости.
7. Способ управления движением транспортного средства с помощью при вождении по любому из пп.1-6, дополнительно содержащий этапы, на которых
сравнивают взаимные расположения результатов обнаружения границ полосы движения и целевого маршрута, сформированного способом, отличным от обнаружения левой и правой границ полосы движения, и корректируют целевой маршрута посредством величины поперечного перемещения в боковом направлении в ситуациях, когда целевой маршрут находится в пределах заданного расстояния от границ полосы движения или в ситуациях, когда целевой маршрут находится с противоположной стороны от границ полосы движения по отношению к транспортному средству-носителю.
8. Устройство управления движением транспортного средства с помощью при вождении, содержащее:
контроллер, который обнаруживает левую и правую границы полосы движения и который управляет движением транспортного средства-носителя на основании результата обнаружения границ полосы движения,
причём контроллер включает в себя
блок различения геометрии дороги, который различает кривую и направление кривой на основании информации о геометрии дороги; и
блок подавления изменения результата обнаружения, который устанавливает результат обнаружения границ полосы движения с внутренней стороны изгиба в значение, для которого изменение в боковом направлении с приближением к транспортному средству-носителю ограничено при движении по кривой.
| JP 6123297 B2, 10.05.2017 | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| УСТРОЙСТВО ПОМОЩИ В ВОЖДЕНИИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ В ВОЖДЕНИИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2624373C1 |

