Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления автономным движением и системе управления автономным движением.
Уровень техники
[0002] Из уровня техники известно устройство, которое управляет автономно управляемым транспортным средством, в котором автономное управление осуществляется для проезда через обслуживаемый пункт оплаты проезда, когда автономно управляемое транспортное средство проезжает через пункт оплаты проезда на шоссе и т.п. (например, см. патентный документ 1). В этом уровне техники, когда имеется переход от области возможности автономного управления к области невозможности автономного управления в пункте оплаты проезда, если переход на ручное управление не был завершен, управление транспортным средством осуществляется таким образом, чтобы оно двигалось через обслуживаемый пункт оплаты проезда и остановилось в обслуживаемом пункте оплаты проезда.
Документы из уровня техники
Патентные документы
[0003] Патентный документ 1: Публикация заявки на патент Японии № 2017-162248
Раскрытие изобретения
Проблема, решаемая изобретением
[0004] Когда для транспортного средства-носителя формируется целевой маршрут движения с предписанными воротами пункта оплаты проезда, установленными в качестве цели проезда, как в технологии, раскрытой в патентном документе 1, обычно целевой маршрут движения формируется вдоль маршрута, определенного в картографической базе данных.
[0005] Однако из-за заторов на дорогах на пункте оплаты проезда иногда формируется очередь из транспортных средств, и в это время бывают случаи, когда целевой маршрут движения, определенный в картографической базе данных, будет отличаться из-за очереди из транспортных средств, которая сформировалась в направлении к целевым воротам. В этом случае, если транспортное средство-носитель направляется по целевому маршруту движения в картографической базе данных, существует риск отклонения транспортного средства от очереди из транспортных средств, направляющихся к целевым воротам.
[0006] Ввиду проблемы, описанной выше, задача настоящего изобретения состоит в создании способа управления автономным движением и системы управления автономным движением, которые способны направлять транспортное средство-носитель таким образом, чтобы оно не отклонялось от очереди из транспортных средств, которая образовалась на пункте оплаты проезда.
Средство для решения проблемы
[0007] Способ управления автономным движением согласно настоящему изобретению содержит задание целевых ворот для проезда для транспортного средства-носителя, определение наличия или отсутствия движущегося впереди транспортного средства, прогнозируемые ворота для проезда которого совпадают с упомянутыми целевыми воротами для проезда, и выполнение движения со следованием с использованием движущегося впереди транспортного средства для прогнозируемых ворот для проезда, которое соответствует целевым воротам для проезда в качестве цели следования.
[0008] Кроме того, система управления автономным движением согласно настоящему изобретению содержит блок задания целевых ворот для проезда, через которые планируется проезд транспортного средства-носителя, и блок определения наличия/отсутствия движущегося впереди транспортного средства для определения наличия или отсутствия движущегося впереди транспортного средства, прогнозируемые ворота для проезда которого соответствуют целевым воротам для проезда транспортного средства-носителя, при проезде через пункт оплаты проезда. Система управления автономным движением дополнительно содержит блок управления движением со следованием, который приводит в действие некоторый исполнительный механизм для выполнения движения со следованием с использованием движущегося впереди транспортного средства для прогнозируемых ворот для проезда, которое соответствует упомянутым целевым воротам для проезда в качестве цели следования.
Эффекты изобретения
[0009] Поскольку в способе управления автономным движением и системе управления автономным движением в соответствии с настоящим изобретением движение со следованием выполняется по отношению к движущемуся впереди транспортному средству для прогнозируемых ворот для проезда, которые соответствуют целевым воротам для проезда для транспортного средства-носителя, можно направить транспортное средство-носитель к целевым воротам для проезда без отклонения от очереди из транспортных средств, сформировавшейся на пункте оплаты проезда.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0010]
Фиг. 1 - общий вид системы, иллюстрирующий систему A управления автономным движением, которая выполняет способ управления автономным движением согласно первому варианту осуществления.
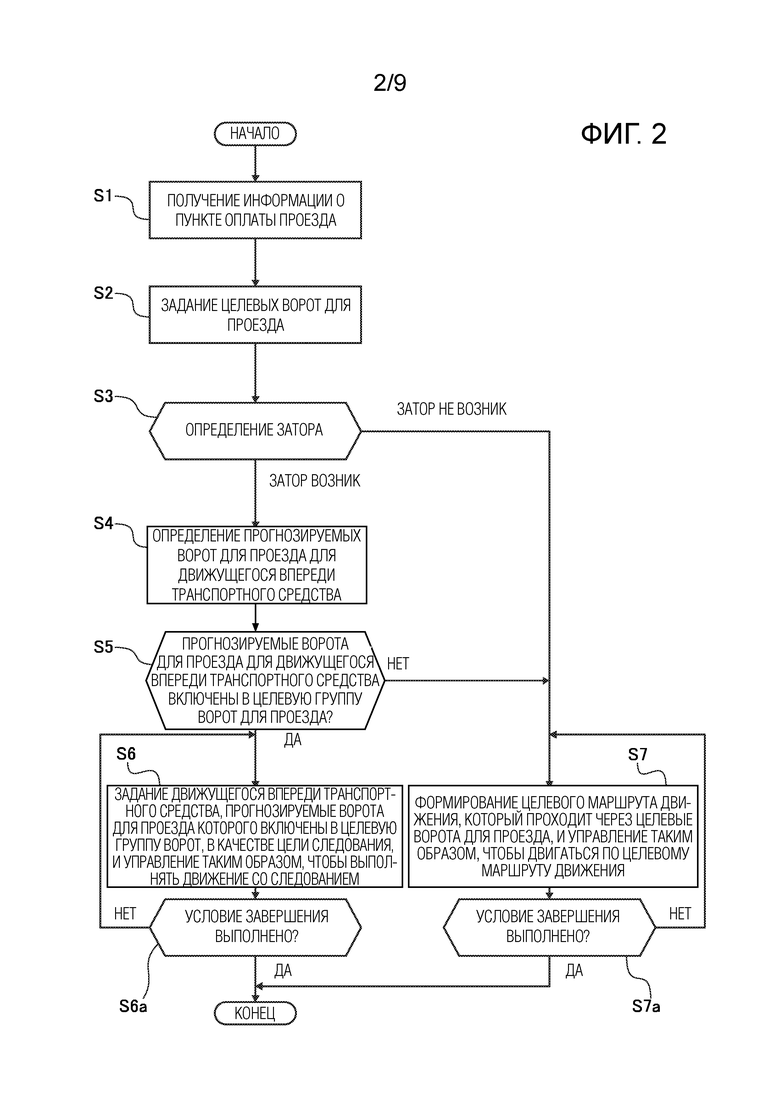
Фиг. 2 - блок-схема, иллюстрирующая последовательность операций процесса управления проездом через пункт оплаты проезда, выполняемого контроллером 40 проезда через пункт оплаты проезда системы A управления автономным движением.
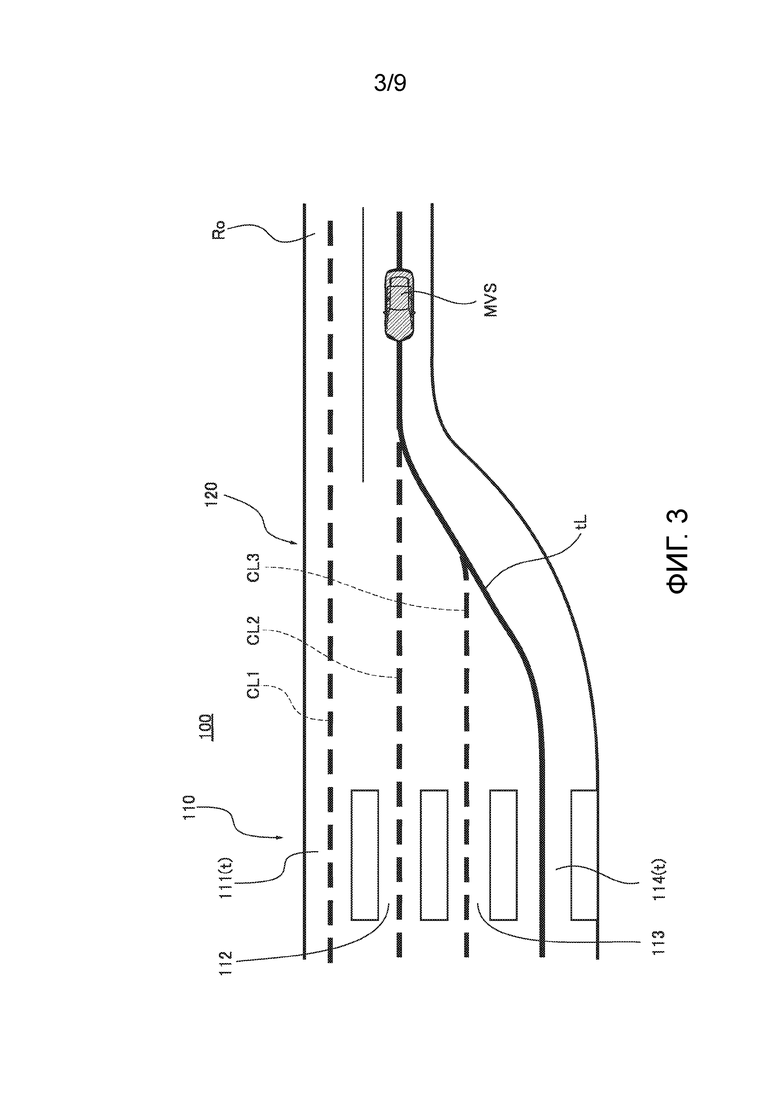
Фиг. 3 - вид сверху, иллюстрирующий один пример пункта 100 оплаты проезда, на котором выполняется управление проездом через пункт оплаты проезда посредством контроллера 40 проезда через пункт оплаты проезда, и один пример целевого маршрута tL движения, сформированного на карте.
Фиг. 4 - вид сверху пункта 100 оплаты проезда для пояснения одного примера управления, когда перед транспортным средством-носителем MVS, в котором установлена система A управления автономным движением, находится множество движущихся впереди транспортных средств PV1, PV2.
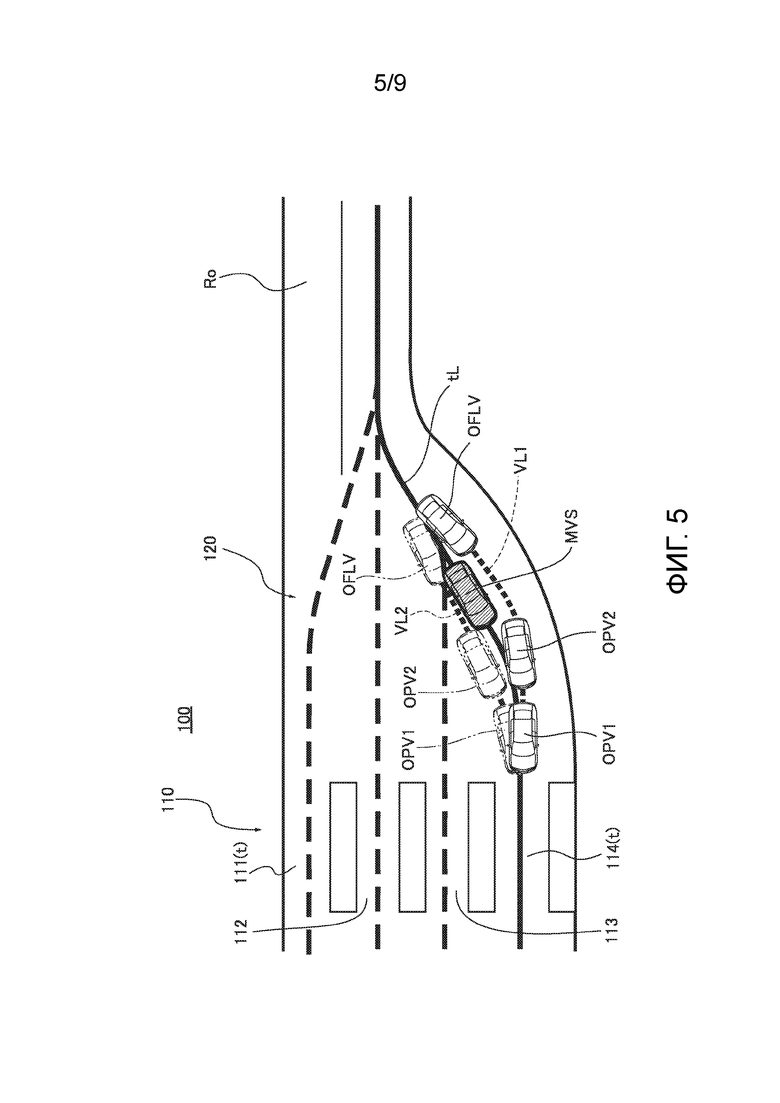
Фиг. 5 - вид сверху пункта 100 оплаты проезда для пояснения проблемы, которая должна быть решена с помощью первого варианта осуществления.
Фиг. 6 - блок-схема, иллюстрирующая последовательность операций процесса управления проездом через пункт оплаты проезда согласно второму варианту осуществления.
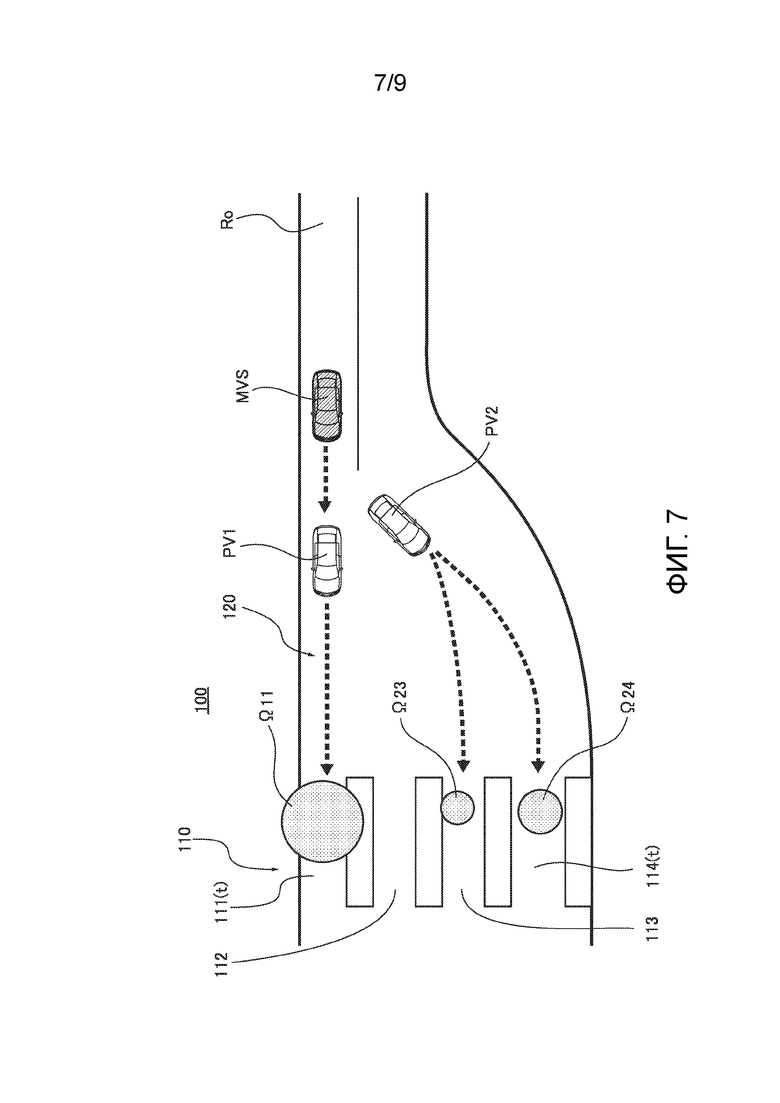
Фиг. 7 - вид сверху пункта 100 оплаты проезда для пояснения управления движением транспортного средства-носителя MVS согласно второму варианту осуществления.
Фиг. 8 - блок-схема, иллюстрирующая последовательность операций процесса управления проездом через пункт оплаты проезда согласно третьему варианту осуществления.
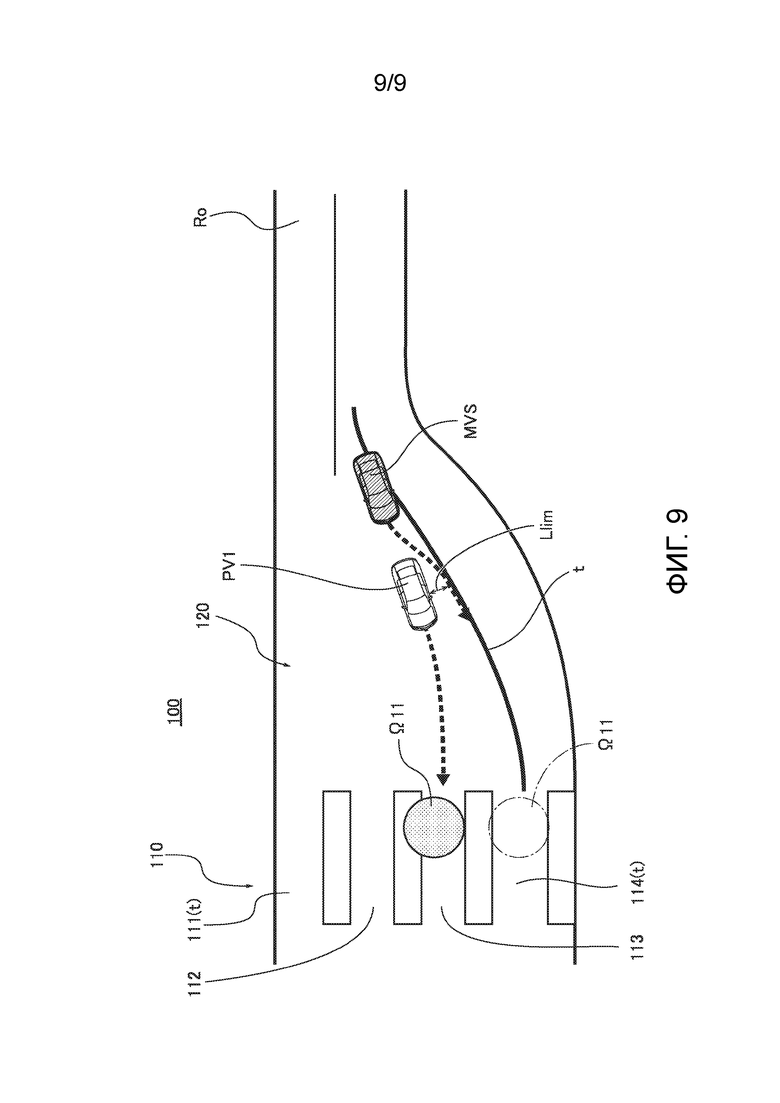
Фиг. 9 - вид сверху пункта 100 оплаты проезда для пояснения управления движением транспортного средства-носителя MVS согласно третьему варианту осуществления.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0011] Варианты осуществления для выполнения способа управления автономным движением и системы управления автономным движением согласно настоящему изобретению будут описаны ниже на основе чертежей.
[0012] (Первый вариант осуществления)
Способ управления автономным движением и система управления автономным движением согласно первому варианту осуществления применяются в автономно управляемом транспортном средстве (один пример транспортного средства с системой помощи при вождении), в котором управление движением, торможением и углом рулевого управления осуществляется автоматически, таким образом, чтобы осуществлять движение по сформированному целевому маршруту движения при выборе режима автономного управления.
[0013] Фиг. 1 иллюстрирует систему A управления автономным движением, в которой применяется способ управления автономным движением и система управления автономным движением согласно первому варианту осуществления. Общая конфигурация системы будет описана ниже на основе Фиг. 1.
[0014] Система A управления автономным движением содержит бортовой датчик 1, блок 2 хранения картографических данных, устройство 3 передачи внешних данных, блок 4 управления автономным движением, исполнительный механизм 5, устройство 6 отображения и устройство 7 ввода.
[0015] Бортовой датчик 1 включает в себя камеру 11, радар 12, GPS 13 и бортовое устройство 14 передачи данных. Кроме того, информация от датчиков, полученная посредством бортового датчика 1, выводится в блок 4 управления автономным движением.
[0016] Камера 11 представляет собой датчик распознавания окружения, который реализует функцию получения, с использованием данных изображения, периферийной информации для транспортного средства-носителя MVS (см. Фиг. 3), такой как полосы движения, движущиеся впереди транспортные средства (см. движущиеся впереди транспортные средства PV1, PV2 на Фиг. 4), пешеходы и тому подобное, в качестве функции, необходимой для автономного движения. Эта камера 11 выполнена, например, путем объединения передней камеры распознавания, задней камеры распознавания, правой камеры распознавания, левой камеры распознавания и тому подобного транспортного средства-носителя MVS (см. Фиг. 3). Транспортное средство-носитель MVS представляет собой транспортное средство, в котором установлена система A управления автономным движением, и указывает на транспортное средство, управление которым осуществляется.
[0017] По изображениям с камеры можно обнаруживать объекты и полосы движения на маршруте движения транспортного средства-носителя и объекты за пределами маршрута движения транспортного средства-носителя (дорожные конструкции, движущиеся впереди транспортные средства, движущиеся сзади транспортные средства, встречные транспортные средства, окружающие транспортные средства, пешеходов, велосипеды, двухколесные транспортные средства), маршрут движения транспортного средства-носителя (белые линии дорожной разметки, границы дорог, линии остановки, пешеходные переходы, дорожные знаки, ограничения скорости и т.д.) и тому подобное.
[0018] Радар 12 представляет собой датчик измерения расстояния, который реализует функцию обнаружения присутствия объекта вблизи транспортного средства-носителя и функцию обнаружения расстояния до объекта вблизи транспортного средства-носителя, в качестве функций, необходимых для автономного движения. Здесь «радар 12» - это общий термин, который включает в себя радары, использующие радиоволны, лидары, использующие оптическое излучение, и сонары, использующие ультразвуковые волны. Примеры радара 12, который может быть использован, включают в себя лазерный радар, радар миллиметрового диапазона, ультразвуковой радар, лазерный дальномер или тому подобное. Этот радар 12 выполнен, например, путем объединения переднего радара, заднего радара, правого радара, левого радара или тому подобного в транспортном средстве-носителе.
[0019] Радар 12 обнаруживает положения объектов на маршруте движения транспортного средства-носителя и объектов за пределами маршрута движения транспортного средства-носителя (дорожных конструкций, движущихся впереди транспортных средств, движущихся сзади транспортных средств, встречных транспортных средств, окружающих транспортных средств, пешеходов, велосипедов, двухколесных транспортных средств), а также расстояние до каждого объекта. Если угол обзора недостаточен, радары могут быть добавлены при необходимости.
[0020] GPS 13 представляет собой датчик положения транспортного средства-носителя, который имеет антенну 13a GNSS и который обнаруживает положение (широту и долготу) транспортного средства-носителя, когда транспортное средство остановлено или находится в движении, путем использования спутниковой связи. “GNSS” - это сокращение от «Глобальной спутниковой навигационной системы», а “GPS” - это сокращение от «Глобальной системы определения местоположения».
[0021] Бортовое устройство 14 передачи данных представляет собой датчик внешних данных, который осуществляет беспроводную связь с устройством 3 передачи внешних данных через приемопередающие антенны 3a, 14a для получения таким образом информации извне, которая не может быть получена транспортным средством-носителем MVS. (см. Фиг. 3).
[0022] Например, в случае устройства передачи данных, установленного на другом транспортном средстве, движущемся вблизи транспортного средства-носителя MVS (см. Фиг. 3), устройство 3 передачи внешних данных осуществляет связь между транспортными средствами между транспортным средством-носителем MVS (см. Фиг 3) и другим транспортным средством. Посредством этой связи между транспортными средствами информация, необходимая для транспортного средства-носителя MVS (см. Фиг. 3), может быть получена из различных элементов информации, содержащихся в другом транспортном средстве, посредством запроса от бортового устройства 14 передачи данных.
[0023] Например, в случае устройства передачи данных, предусмотренного в инфраструктурном оборудовании, устройство 3 передачи внешних данных выполняет связь с инфраструктурой между транспортным средством-носителем MVS (см. Фиг. 3) и инфраструктурным оборудованием. Посредством этой связи с инфраструктурой информация, необходимая для транспортного средства-носителя MVS (см. Фиг. 3), может быть получена из различных элементов информации, содержащейся в инфраструктурном оборудовании, посредством запроса от бортового устройства 14 передачи данных. Например, если в картографических данных, сохраненных в блоке 2 хранения картографических данных, имеется недостаточная информация или в информации, которая была обновлена из картографических данных, недостаточная информация или обновленная информация может быть дополнена. Также возможно получение информации о дорожном движении, такой как информация о заторах движения и информация об ограничениях движения, для целевого маршрута tL движения (см. Фиг. 3), по которому планируется движение транспортного средства-носителя MVS (см. Фиг. 3).
[0024] Блок 2 хранения картографических данных состоит из встроенной памяти, в которой хранятся так называемые электронные картографические данные, в которых широта/долгота связаны с картографической информацией. Картографические данные, хранящиеся в блоке 2 хранения картографических данных, являются картографическими данными высокой точности, имеющими уровень точности, с которым можно распознавать по меньшей мере каждую из полос движения дороги, которая имеет множество полос движения. Используя такие картографические данные высокой точности, можно сформировать линейный целевой маршрут tL движения, указывающий, по какой полосе движения из множества полос движения транспортное средство-носитель MVS (см. Фиг. 3) будет двигаться при управлении автономным движением. Затем, когда положение транспортного средства-носителя, обнаруженное GPS 13, распознается как информация о положении транспортного средства-носителя, картографические данные высокой точности вокруг положения транспортного средства-носителя отправляются в блок 4 управления автономным движением.
[0025] Картографические данные высокой точности включают в себя информацию о дороге, связанную с каждой точкой, и информация о дороге определяется узлами и участками, которые соединяют узлы. Информация о дороге включает в себя информацию для идентификации дороги по местоположению и области дороги, типа дороги для каждой дороги, ширины полос движения для каждой дороги и информации о форме дороги. Для каждого элемента идентификационной информации каждого участка дороги информация о дороге сохраняется в связи с местоположением перекрестка, направлениями подъезда к перекрестку и другой информацией, связанной с перекрестком. Для каждого элемента идентификационной информации каждого участка дороги информация о дороге сохраняется в связи с типом дороги, шириной полос движения, формой дороги, возможностью сквозного движения, правилами приоритетности, возможностью обгона (возможен ли выезд в смежную полосу движения), ограничением скорости, знаками и прочей информацией, относящейся к дороге.
[0026] Кроме того, информация, относящаяся к автомагистралям и платным дорогам в данных, сохраненных в блоке 2 хранения картографических данных, включает в себя информацию, относящуюся к пунктам 100 оплаты проезда (см. Фиг. 3), предусмотренным на въездах и выездах с автомагистралей и платных дорог. Информация, относящаяся к пунктам 100 оплаты проезда, включает в себя информацию о воротах 110 (информацию о местоположении и типах, таких как ворота ETC и обычные ворота: см. Фиг. 3), которые установлены в пунктах 100 оплаты проезда.
[0027] Блок 4 управления автономным движением имеет функцию интеграции информации, вводимой из бортового датчика 1 и блока 2 хранения картографических данных, для формирования целевого маршрута tL движения (см. Фиг. 3), профиля целевой скорости транспортного средства (включая профиль ускорения и профиль замедления) и тому подобного. То есть целевой маршрут tL движения на уровне полосы движения от текущего положения до места назначения формируется на основе способа поиска предписанного маршрута, картографических данных высокой точности от блока 2 хранения картографических данных и тому подобного, и формируется профиль целевой скорости транспортного средства и т.д. по целевому маршруту tL движения. Кроме того, если определено, что управление автономным движением не может поддерживаться в результате распознавания посредством бортового датчика 1, когда транспортное средство-носитель MVS (см. Фиг. 3) остановлено или движется по целевому маршруту tL движения, целевой маршрут tL движения, профиль целевой скорости транспортного средства и тому подобное последовательно корректируются.
[0028] Когда формируется целевой маршрут tL движения, блок 4 управления автономным движением вычисляет значение команды движения, значение команды торможения и значение команды угла рулевого управления таким образом, чтобы транспортное средство-носитель MVS (см. Фиг. 3) двигалось по целевому маршруту tL движения, и выводит вычисленные значения команд на исполнительный механизм 5. Более конкретно, результат вычисления значения команды движения выводится на исполнительный механизм 51 движения, результат вычисления значения команды торможения выводится на исполнительный механизм 52 торможения, а результат вычисления значения команды угла рулевого управления выводится на исполнительный механизм 53 угла рулевого управления.
[0029] Исполнительный механизм 5 представляет собой управляющий исполнительный механизм, который побуждает транспортное средство-носитель MVS (см. Фиг. 3) двигаться и останавливаться по целевому маршруту tL движения (см. Фиг. 3), и включает в себя исполнительный механизм 51 движения, исполнительный механизм 52 торможения и исполнительный механизм 53 угла рулевого управления.
[0030] Исполнительный механизм 51 движения принимает значения команды движения, введенные из блока 4 управления автономным движением, и управляет движущей силой, которая выводится на ведущие колеса. Примеры исполнительного механизма 51 движения, который может использоваться, включают в себя двигатель в случае транспортного средства с приводом от двигателя, двигатель и мотор/генератор (работа с выработкой мощности) в случае гибридного транспортного средства, а также мотор/генератор (работа с выработкой мощности) в случае электрического транспортного средства.
[0031] Исполнительный механизм 52 торможения принимает значения команды торможения, введенные из блока 4 управления автономным движением, и управляет силой торможения, которая выводится на ведущие колеса. Примеры исполнительного механизма 52 торможения, который может быть использован, включают в себя гидроусилитель, электрический усилитель, исполнительный механизм на основе давления тормозной жидкости, исполнительный механизм тормозного мотора и мотор/генератор (регенерация).
[0032] Исполнительный механизм 53 угла рулевого управления принимает значения команды угла рулевого управления, введенные из блока 4 управления автономным движением, и управляет углом поворота управляемых колес. Примеры исполнительного механизма 53 угла рулевого управления, который может быть использован, включают в себя мотор рулевого управления или тому подобное, который предусмотрен в системе передачи усилия рулевого управления в системе рулевого управления.
[0033] Устройство отображения отображает на экране положение движущегося транспортного средства-носителя MVS на карте (см. Фиг. 3), чтобы обеспечить водителю и пассажирам визуальную информацию о местоположении транспортного средства-носителя, когда транспортное средство остановлено или движется при помощи управления автономным движением. Это устройство 6 отображения вводит информацию о целевом маршруте движения, информацию о положении транспортного средства-носителя, информацию о месте назначения и тому подобное, формируемые блоком 4 управления автономным движением, и отображает на экране дисплея карту, дороги, целевой маршрут tL движения (маршрут движения транспортного средства-носителя), местоположение транспортного средства-носителя, место назначения и тому подобное наглядным способом.
[0034] Устройство 7 ввода выполняет различные операции ввода посредством операции водителя, для чего может использоваться, например, функция сенсорной панели устройства 6 отображения, а также другие рукоятки и переключатели. Примеры вводов, выполняемых водителем, включают в себя ввод информации, относящейся к месту назначения, и ввод настроек, таких как движение с постоянной скоростью и движение со следованием при управлении автономным движением, и тому подобное.
[0035] Система A управления автономным движением дополнительно содержит контроллер 40 проезда через пункт оплаты проезда для управления исполнительным механизмом 5 при проезде через пункт 100 оплаты проезда. Во время проезда через пункт 100 оплаты проезда контроллер 40 проезда через пункт оплаты проезда переключается с управления для побуждения транспортного средства-носителя MVS двигаться по целевому маршруту tL движения, как описано выше, на управление для следования за движущимся впереди транспортным средством PV (см. движущиеся впереди транспортные средства PV1, PV2 на Фиг. 4), если это будет сочтено необходимым.
[0036] Последовательность операций процесса управления проездом через пункт оплаты проезда, выполняемого системой A управления автономным движением согласно первому варианту осуществления во время проезда через пункт 100 оплаты проезда, будет описана ниже на основе блок-схемы по Фиг. 2. Управление проездом через пункт оплаты проезда запускается, когда транспортное средство-носитель MVS (см. Фиг. 3) приближается к пункту 100 оплаты проезда (см. Фиг. 3), например, непосредственно до или после въезда в область 120 пункта оплаты проезда (см. Фиг. 3), где дорога Ro начинает расширяться.
[0037] В этом управлении проездом через пункт оплаты проезда сначала, на этапе S1, получается информация о пункте оплаты проезда из картографической информации, сохраняемой в блоке 2 хранения картографических данных. Эта информация о пункте оплаты проезда включает в себя информацию, относящуюся к воротам 110 (см. Фиг. 3), то есть количество, расположение, тип и тому подобное для каждых из ворот 111-114 у ворот 110, показанных на Фиг. 3. Тип ворот 110 различается в соответствии с различными типами режимов проезда, такими как ворота ETC (электронная система взимания платы), ворота, управляемые персоналом и тому подобное.
[0038] Здесь на Фиг. 3 показан один пример пункта 100 оплаты проезда. Пункт 100 оплаты проезда, показанный на Фиг. 3, имеет ворота 110 и область 120 пункта оплаты проезда. Ворота 110 представляют собой собирательное понятие для первых ворот 111, вторых ворот 112, третьих ворот 113 и четвертых ворот 114. Количество ворот, составляющих ворота 110, не ограничивается числом «4», как показано на чертеже, и может представлять собой большее или меньшее количество. Кроме того, область 120 пункта оплаты проезда относится к области, где дорога шире, чем двухполосная дорога Ro.
[0039] Возвращаясь к Фиг. 2, на этапе S2, следующем за этапом S1, целевые ворота для проезда, которые будут целью проезда, задаются из множества ворот (первых-четвертых ворот 111-114 на Фиг. 3) из ворот 110 пункта 100 оплаты проезда.
[0040] Затем, на этапе S2, целевые ворота для проезда задаются из первых-четвертых ворот 111-114; в этой конкретной конфигурации, если имеется множество ворот, которые соответствуют типу режима проезда транспортного средства-носителя MVS, также задается множество целевых ворот. В нижеследующем описании первые ворота 111 и четвертые ворота 114 заданы как целевые ворота для проезда, а целевые ворота для проезда обозначены добавлением (t) в конец условного обозначения каждых из ворот 111, 114. Кроме того, это множество целевых ворот 111(t), 114(t) для проезда вместе называется целевой группой ворот для проезда.
[0041] На следующем этапе S3 выполняется определение затора на дороге в отношении того, имеется ли затор на дороге вблизи пункта 100 оплаты проезда (например, в области 120 или непосредственно перед ней). Затем, если имеется затор на дороге, процесс переходит к этапу S4, а если затора на дороге нет, процесс переходит к этапу S7.
[0042] Здесь наличие затора на дороге может быть определено на основании скорости транспортного средства для транспортного средства-носителя MVS или прогнозируемой скорости транспортного средства для транспортного средства-носителя MVS или другого транспортного средства в области 120 пункта оплаты проезда; если эти скорости транспортных средств меньше или равны заданному пороговому значению, можно определить, что имеется затор на дороге.
[0043] Кроме того, определение затора на дороге также может выполняться на основании информации об окружении транспортного средства и внешней информации. Здесь определение на основании информации об окружении транспортного средства может быть выполнено на основании, например, количества других транспортных средств, присутствующих в пределах предписанного расстояния перед транспортным средством-носителем MVS. Кроме того, определение на основании внешней информации может выполняться на основании, например, информации, полученной посредством связи между транспортными средствами, информации о дорожном движении, называемой VICS (системы информации и связи для транспортных средств), или тому подобного.
[0044] На этапе S7, к которому процесс переходит, если нет затора на дороге вблизи пункта 100 оплаты проезда, в качестве целевых ворот выбираются одни ворота из целевой группы ворот, а целевой маршрут tL движения, который проходит через эти целевые ворота для проезда, формируется на карте, как показано на Фиг. 3. Кроме того, на этапе S7 осуществляется управление исполнительным механизмом 5 для движения по целевому маршруту tL движения.
[0045] Например, при движении по полосе с левой стороны дороги Ro, как показано на фиг. 3, формируется целевой маршрут tL движения, который проходит по левому краю области 120 пункта оплаты проезда и проходит через целевые ворота для проезда, в данном случае крайние левые, четвертые ворота 114. Кроме того, при движении по полосе с правой стороны дороги Ro может быть сформирован целевой маршрут tL движения, который проходит в прямом направлении по той же полосе движения и проходит через целевые ворота для проезда, в данном случае крайние правые, первые ворота 111.
[0046] Во время выполнения процесса на этапе S7 процесс переходит к этапу S7a в предписанном цикле для определения, выполнено ли условие завершения управления движением по целевому маршруту tL движения, который проходит через целевые ворота для проезда, и если условие завершения не выполнено, процесс возвращается к этапу S7 для продолжения процесса. Условие завершения включает в себя проезд через ворота 110. Следовательно, процесс по описанному выше этапу S7 продолжается до тех пор, пока не будет осуществлен проезд через ворота 110. Кроме того, условие завершения может включать в себя отмену самой операции автоматического управления. Примеры случаев, в которых операция автоматического управления отменяется, включают в себя те, в которых водитель транспортного средства-носителя MVS выбирает ручное управление, или те, в которых обнаружена некоторая неисправность системы A управления автономным движением.
[0047] С другой стороны, на этапе S4, к которому процесс переходит, когда на этапе S3 имеется затор на дороге вблизи пункта 100 оплаты проезда, вычисляются прогнозируемые ворота для проезда движущегося впереди транспортного средства PV (см. PV1, PV2 на Фиг.4). Здесь «движущееся впереди транспортное средство» - это транспортное средство, которое движется впереди транспортного средства-носителя MVS. Кроме того, при описании в нижеприведенном описании, когда упоминается конкретное транспортное средство из числа движущихся впереди транспортных средств PV1, PV2 и т.п., как отмечено на чертеже, показанном на Фиг. 4, используется то же условное обозначение, что и показанное на чертеже. С другой стороны, если не упоминается конкретное транспортное средство, например, при обращении к движущимся впереди транспортным средствам PV1, PV2 по Фиг. 4 или другому транспортному средству используется движущееся впереди транспортное средство PV.
[0048] В качестве способа определения движущегося впереди транспортного средства PV в качестве цели для вычисления прогнозируемых ворот для проезда на этапе S4 по Фиг. 2, например, могут быть указаны все транспортные средства, присутствующие в заданной прямоугольной области перед транспортным средством-носителем MVS. В качестве альтернативы, прямые линии могут проходить радиально от центра транспортного средства-носителя MVS через равные интервалы в области перед транспортным средством-носителем MVS, и может быть указано первое транспортное средство, которое пересекает одну из прямых линий.
[0049] Кроме того, поскольку этот этап S4 является этапом, к которому процесс переходит, если определено, что имеется затор на дороге, на Фиг.4 показано множество движущихся впереди транспортных средств PV1, PV2. В примере, показанном на Фиг. 4, вычисляются прогнозируемые ворота для проезда целевых движущихся впереди транспортных средств PV1, PV2. Вычисление этих прогнозируемых ворот для проезда выполняется путем сначала вычисления места назначения (например, путем вычисления мест назначения, указанных стрелками ML1, ML2) каждого из движущихся впереди транспортных средств PV1, PV2 на основании из положения, ориентации, скорости и угловой скорости каждого из движущихся впереди транспортных средств PV1, PV2. Затем получают прогнозируемые ворота для проезда движущихся впереди транспортных средств PV1, PV2 путем определения того, с какими из первых-четвертых ворот 111-114 пункта 100 оплаты проезда на карте совпадают вычисленные места назначения. Например, в примере, показанном на Фиг. 4, третьи ворота 113 являются прогнозируемыми воротами для проезда движущегося впереди транспортного средства PV1, а четвертые ворота 114 являются прогнозируемыми воротами для проезда движущегося впереди транспортного средства PV2.
[0050] Затем на этапе S5, показанном на Фиг. 2, определяется, включены ли прогнозируемые ворота для проезда множества движущихся впереди транспортных средств PV1, PV2 в целевую группу ворот для проезда, заданную на этапе S2. То есть определяется, имеются ли движущиеся впереди транспортные средства PV1, PV2, чьи прогнозируемые ворота для проезда соответствуют целевым воротам 111(t), 114(t) для проезда транспортного средства-носителя MVS. Затем, если прогнозируемые ворота для проезда включены в целевую группу ворот для проезда, процесс переходит к этапу S6; и если прогнозируемые ворота для проезда не включены в целевую группу ворот для проезда, процесс переходит к этапу S7.
[0051] На этапе S6 движущееся впереди транспортное средство PV, прогнозируемые ворота для проезда которого включены в целевую группу ворот для проезда, задается как цель для следования. В частности, в примере, показанном на фиг. 4, движущееся впереди транспортное средство PV2, прогнозируемые ворота для проезда которого являются четвертыми воротами 114(t), которые являются целевыми воротами для проезда транспортного средства-носителя MVS, задается в качестве цели для следования.
[0052] Затем, на этапе S6, выполняется управление следованием для управления исполнительным механизмом 5 таким образом, чтобы транспортное средство-носитель MVS следовало за движущимся впереди транспортным средством PV2. Как хорошо известно, существуют различные типы управления для реализации управления следованием, и, например, может быть использована любая методика, обычно используемая для помощи при автономном движении по шоссе. Более конкретно, положение и скорость движущегося впереди транспортного средства PV2 время от времени обнаруживаются с использованием камеры 11 или радара 12, и управление транспортным средством осуществляется таким образом, чтобы оно следовало маршруту движения движущегося впереди транспортного средства PV2 путем управления предписанной относительной скоростью и расстоянием между транспортными средствами по отношению к движущемуся впереди транспортному средству PV2.
[0053] Во время выполнения процесса этапа S6 процесс переходит к этапу S6a в предписанном цикле (с периодичностью, например, около 30 мс), для определения, выполнено ли условие завершения, таким же образом, как на вышеописанном этапе S7a, и управление следованием на этапе S6 продолжается до тех пор, пока не будет выполнено условие завершения.
[0054] С другой стороны, если ни одни из прогнозируемых ворот для проезда движущихся впереди транспортных средств PV не включены в целевую группу ворот для проезда на этапе S5, процесс переходит к этапу S7, и выполняется управление для движения по целевому маршруту tL движения (см. Фиг. 3), сформированному на карте, таким же образом, как и при отсутствии затора на дороге.
[0055] Далее будут описаны действия по первому варианту осуществления, но перед этим пояснением будет описана проблема, которая должна быть решена посредством первого варианта осуществления.
[0056] При формировании целевого маршрута tL движения белые линии, разделяющие полосы движения на пункте 100 оплаты проезда, не нанесены; однако, как показано на Фиг. 3, пунктирные линии CL1, CL2, CL3, которые проходят через первые и третьи ворота 111, 112, 113 на картографических данных, определяют осевые линии движения. Следовательно, когда формируется целевой маршрут tL движения, он формируется вдоль этих осевых линий (пунктирные линии CL1, CL2, CL3). Кроме того, на Фиг. 3 целевой маршрут tL движения формируется вдоль осевой линии, которая проходит через четвертые ворота 114.
[0057] Если на пункте 100 оплаты проезда имеется затор движения, в направлении каждых из первых-четвертых ворот 111-114 формируются очереди из транспортных средств. На Фиг.5 показан один такой пример, иллюстрирующий случай, в котором очередь VL1 из транспортных средств и очередь VL2 из транспортных средств формируются в направлении четвертых ворот 114. Поскольку белые линии, разделяющие полосы движения, не нанесены на пункте 100 оплаты проезда, эти очереди VL1, VL2 из транспортных средств формируются нерегулярным образом. Следовательно, бывают случаи, когда очереди VL1, VL2 из транспортных средств отклоняются от осевой линии, определенной на карте (показанной как целевой маршрут tL движения на Фиг. 5).
[0058] Когда формируются такие очереди VL1, VL2 из транспортных средств, если транспортное средство-носитель MVS движется по целевому маршруту tL движения, сформированному на карте, положение транспортного средства-носителя MVS отклоняется от очереди VL1 из транспортных средств и очереди VL2 из транспортных средств. В таком случае существует риск того, что водитель транспортного средства-носителя MVS будет испытывать дискомфорт, как и водители движущихся впереди транспортных средств OPV1, OPV2 и находящегося вблизи движущегося сзади транспортного средства OFLV.
[0059] В отличие от этого, в первом варианте осуществления выполнение управления проездом через пункт оплаты проезда предотвращает отклонение транспортного средства-носителя MVS от очередей VL1, VL2 из транспортных средств, как описано выше, и таким образом можно предотвратить возникновение дискомфорта у водителя.
[0060] Будет поэтапно описан один пример выполнения управления проездом через пункт оплаты проезда, когда транспортное средство-носитель MVS проезжает через пункт 100 оплаты проезда в первом варианте осуществления. Во-первых, как показано на Фиг. 3, в первом варианте осуществления, когда транспортное средство-носитель MVS приближается к пункту 100 оплаты проезда, задаются целевые ворота для проезда в воротах 110 (S2). В примере, показанном на Фиг. 4, первые ворота 111 и четвертые ворота 114, соответственно, задаются в качестве целевых ворот 111(t) и 114(t) для проезда.
[0061] Затем, если в области 120 пункта оплаты проезда имеется затор на дороге, вычисляются прогнозируемые ворота для проезда для каждого из множества движущихся впереди транспортных средств PV1, PV2 перед транспортным средством-носителем MVS (S4). В примере, показанном на Фиг. 4, третьи ворота 113 вычислены как прогнозируемые ворота для проезда движущегося впереди транспортного средства PV1, а четвертые ворота 114 вычислены как прогнозируемые ворота для проезда движущегося впереди транспортного средства PV2.
[0062] Кроме того, определяется (S5) наличие или отсутствие движущегося впереди транспортного средства PV, прогнозируемые ворота для проезда (третьи ворота 113, четвертые ворота 114) которого включены в целевую группу ворот для проезда (то есть прогнозируемые ворота для проезда, соответствующие одним из целевых ворот ворота 111 (t), 114 (t)).
[0063] Затем, если имеется движущееся впереди транспортное средство PV, прогнозируемые ворота для проезда которого включены в целевую группу ворот для проезда, соответствующее движущееся впереди транспортное средство PV (движущееся впереди транспортное средство PV2 на Фиг.4) задается как цель для следования, и управление исполнительным механизмом 5 осуществляется таким образом, что транспортное средство-носитель MVS следует за движущимся впереди транспортным средством PV2 (S6). Это движение со следованием продолжается до тех пор, пока не будет выполнено условие завершения, то есть до тех пор, пока транспортное средство-носитель MVS не проедет через ворота 110.
[0064] Таким образом, в ситуации, когда в области 120 пункта оплаты проезда возникает затор и образуются очереди VL1, VL2 из транспортных средств, управление транспортным средством-носителем MVS осуществляется таким образом, чтобы оно следовало за движущимся впереди транспортным средством PV2, а не двигалось по целевому маршруту tL движения. Следовательно, как показано на Фиг. 5, можно предотвратить отклонение транспортного средства-носителя MVS от очередей VL1, VL2 из транспортных средств и предотвратить возникновение дискомфорта у водителя транспортного средства-носителя MVS, а также у водителей находящихся вблизи движущихся впереди транспортных средств OPV1, OPV2 и движущегося сзади транспортного средства OFLV.
[0065] Эффекты способа управления автономным движением и системы управления автономным движением согласно первому варианту осуществления будут перечислены ниже. (a) Способ управления автономным движением, выполняемый системой A управления автономным движением согласно первому варианту осуществления, представляет собой способ управления автономным движением, выполняемый системой A управления автономным движением, имеющей блок 4 управления автономным движением в качестве контроллера, который выполняет управление автономным движением для побуждения транспортного средства-носителя MVS двигаться по целевому маршруту tL движения, сформированному на карте, включая задание одних или множества целевых ворот для проезда, через которые планируется проезд транспортного средства-носителя MVS из первых-четвертых ворот 111-114 пункта 100 оплаты проезда при проезде через пункт 100 оплаты проезда при движении по целевому маршруту tL движения (этап S2), получение прогнозируемых ворот для проезда для множества движущихся впереди транспортных средств PV1, PV2, которые движутся впереди транспортного средства-носителя MVS (этап S4), определение наличия или отсутствия движущихся впереди транспортных средств PV1, PV2, для которых были спрогнозированы ворота для проезда, соответствующие целевым воротам для проезда транспортного средства-носителя MVS (этап S5) и выполнение движения со следованием, если имеется движущееся впереди транспортное средство PV2, для которого имеются прогнозируемые ворота для проезда, соответствующие целевым воротам для проезда, с использованием движущегося впереди транспортного средства PV2 в качестве цели следования (этап S6). Таким образом, даже если управление автономным движением выполняется для движения по целевому маршруту tL движения на карте, если у ворот 110 на пункте 100 оплаты проезда образуются очереди VL1, VL2 из транспортных средств, транспортное средство-носитель MVS может следовать за движущимся впереди транспортным средством PV таким образом, что транспортное средство-носитель не отклоняется от очередей VL1, VL2 из транспортных средств. Следовательно, можно предотвратить отклонение транспортного средства-носителя MVS от очередей VL1, VL2 из транспортных средств и предотвратить возникновение дискомфорта у водителя транспортного средства-носителя MVS, а также у находящихся поблизости водителей.
[0066] (b) В способе управления автономным движением, выполняемом системой A управления автономным движением, согласно первому варианту осуществления,
при проезде через пункт 100 оплаты проезда каждый из этапов S4, S5, S6 выполняется, если имеется затор на дороге, в котором скорость транспортного средства для транспортного средства-носителя MVS или прогнозируемая скорость транспортного средства для транспортного средства-носителя MVS становится меньшей или равной предписанной скорости транспортного средства; а если не имеется затор на дороге, управление автономным движением выполняется для движения по целевому маршруту tL движения (этап S7). Следовательно, если имеется затор на дороге на пункте 100 оплаты проезда, на котором образуются очереди VL1, VL2 и т.п. из транспортных средств, транспортное средство-носитель MVS может надежно следовать за движущимся впереди транспортным средством PV таким образом, что транспортное средство-носитель не отклоняется от очередей VL1, VL2 из транспортных средств и т.д.
[0067] (c) Система A управления автономным движением согласно первому варианту осуществления содержит блок 4 управления автономным движением, который выполняет управление автономным движением для приведения в действие исполнительного механизма 5, который управляет состоянием движения транспортного средства-носителя MVS таким образом, чтобы побудить транспортное средство-носитель MVS двигаться по целевому маршруту tL движения, сформированному на карте, на основании информации об окружении транспортного средства-носителя MVS и информации, относящейся к движению транспортного средства-носителя MVS, при этом блок 4 управления автономным движением имеет контроллер 40 проезда через пункт оплаты проезда, включающий в себя секцию, которая выполняет процесс этапа S2, в качестве блока задания целевых ворот для проезда для задания одних или множества целевых ворот для проезда, через которые планируется проезд транспортного средства-носителя MVS, из первых-четвертых ворот 111-114 пункта 100 оплаты проезда, при проезде через пункт 100 оплаты проезда во время движения по целевому маршруту tL движения, секцию, которая выполняет процесс этапа S4 в качестве блока прогнозирования ворот для проезда для получения прогнозируемых ворот для проезда для множества движущихся впереди транспортных средств PV1, PV2, которые движутся впереди транспортного средства-носителя MVS, секцию, которая выполняет процесс этапа S5, в качестве блока определения наличия/отсутствия движущегося впереди транспортного средства для определения наличия или отсутствия движущегося впереди транспортного средства PV2, которое имеет прогнозируемые ворота для проезда, которые соответствуют целевым воротам для проезда для транспортного средства-носителя MVS, и секцию, которая выполняет процесс этапа S6, в качестве блока управления движением со следованием для управления исполнительным механизмом 5 для выполнения движения со следованием, если имеется движущееся впереди транспортное средство PV2, для которого имеются прогнозируемые ворота для проезда, которые соответствуют целевым воротам для проезда, используя движущееся впереди транспортное средство PV2 в качестве цели следования. Следовательно, как описано выше в (a), если у ворот 110 формируются очереди VL1, VL2 из транспортных средств, можно предотвратить отклонение транспортного средства-носителя MVS от очередей VL1, VL2 из транспортных средств. Следовательно, можно предотвратить возникновение дискомфорта у водителя транспортного средства-носителя MVS, а также у находящихся поблизости водителей.
[0068] (Другие варианты осуществления)
Ниже будут описаны другие варианты осуществления. В описаниях других вариантов осуществления общим конфигурациям присвоены одинаковые условные обозначения, и будут описаны только их отличия.
[0069] Сначала на основе блок-схемы на Фиг. 6 будет описано управление проездом через пункт оплаты проезда во втором варианте осуществления. Этапам, которые являются одинаковыми с этапами в первом варианте осуществления, присвоены те же условные обозначения, что и в первом варианте осуществления, и их описание не приводится.
[0070] Второй вариант осуществления представляет собой пример, в котором транспортное средство из числа множества движущихся впереди транспортных средств PV, прогнозируемые ворота для проезда которых совпадают с целевой группой ворот для проезда, имеет наивысшую степень достоверности прогнозирования Ωg, которая является степенью достоверности проезда через предполагаемые ворота для проезда, устанавливается в качестве цели следования. То есть во втором варианте осуществления содержание процесса, следующего за этапом S3, является иным.
[0071] На этапе S4b, следующем за этапом S3, в дополнение к вычислению прогнозируемых ворот для проезда движущихся впереди транспортных средств PV, степень достоверности прогнозирования Ωg, которая является степенью достоверности проезда через каждые из прогнозируемых ворот для проезда, вычисляется на основании расстояния и формы прогнозируемой траектории до ворот 110 (прогнозируемое положение движущегося впереди транспортного средства PV) и тому подобного.
[0072] Здесь будет описана «степень достоверности прогнозирования Ωg». Степень достоверности прогнозирования Ωg представляет собой значение индекса, представляющее вероятность того, что движущееся впереди транспортное средство PV проедет через прогнозируемые ворота для проезда, и вычисляется, например, с помощью следующей формулы (1).

ωg: вероятность проезда через целевые ворота для проезда (вероятность)
ωN: вероятность проезда через ворота N (вероятность)
[0073] Кроме того, вероятность ωN проезда через ворота N может быть вычислена по следующей формуле (2).

PN: положение ворот
Pv: прогнозируемое положение движущегося впереди транспортного средства (прогнозируемое положение до прогнозируемого времени проезда через ворота)
C: матрица дисперсии отклонений прогнозируемого положения движущегося впереди транспортного средства
[0074] Как описано выше, ωN - это вероятность того, что движущееся впереди транспортное средство PV проедет через ворота N, и она является общей функцией распределения вероятностей для общего нормального распределения. Вероятность ωN уменьшается по мере того, как будущее прогнозируемое положение Pv движущегося впереди транспортного средства PV и положение PN ворот становятся дальше друг от друга. Кроме того, вероятность ωN уменьшается по мере увеличения дисперсии отклонений C прогнозируемого положения независимо от величины (PN-PV).
[0075] Степень достоверности прогнозирования Ωg вычисляется с использованием отношения вероятности ωg целевых ворот для проезда к сумме вероятностей ωN, вычисленных для всех ворот 110. Таким образом, даже если место назначения движущегося впереди транспортного средства PV совпадает с целевыми воротами для проезда, если дисперсия отклонений C прогнозируемого положения Pv является большой, различия в вероятности между воротами будут стремиться к уменьшению, так что степень достоверности прогнозирования Ωg уменьшается.
[0076] Дисперсия отклонения C является параметром, который увеличивается в соответствии с прогнозируемой шириной интервала времени (величиной движения к воротам). Кроме того, дисперсия отклонения C может также увеличиваться в соответствии с состоянием движения транспортного средства (например: движется ли транспортное средство по извилистой траектории, состояние наблюдения (например: редко ли оно фиксируется камерой) или тому подобным.
[0077] На этапе S5b, следующем за этапом S4b, на котором вычисляются прогнозируемые ворота для проезда и степень достоверности прогнозирования Ωg, извлекается движущееся впереди транспортное средство PV, прогнозируемые ворота для проезда для которого включены в целевую группу ворот для проезда. В этом случае, независимо от того, имеются ли одно или множество движущихся впереди транспортных средств PV, прогнозируемые ворота для проезда которых включены в целевую группу ворот для проезда, извлекаются все движущиеся впереди транспортные средства. Кроме того, на последующем этапе S6b определяется наличие или отсутствие извлеченного движущегося впереди транспортного средства PV, и если присутствует извлеченное движущееся впереди транспортное средство PV, процесс переходит к этапу S7b; а если нет, процесс переходит к этапу S7.
[0078] На этапе S7b, на который процесс переходит, если извлечены движущиеся впереди транспортные средства PV, движущееся впереди транспортное средство PV с наивысшей степенью достоверности прогнозирования Ωg, которая представляет собой степень вероятности проезда через каждые из прогнозируемых ворот для проезда, устанавливается в качестве цели для следования, и выполняется управление следованием таким образом, чтобы следовать за движущимся впереди транспортным средством PV. Если имеется одно извлеченное движущееся впереди транспортное средство PV, движущееся впереди транспортное средство PV устанавливается в качестве цели следования как движущееся впереди транспортное средство PV с наивысшей степенью достоверности прогнозирования Ωg. Если имеется множество извлеченных движущихся впереди транспортных средств PV, транспортное средство с наивысшим значением степени достоверности прогнозирования Ωg из множества движущихся впереди транспортных средств PV задается в качестве цели следования.
[0079] Далее на основе Фиг. 7 будет описано действие по второму варианту осуществления. На Фиг. 7 показан случай, когда на пункте 100 оплаты проезда имеется затор на дороге, и перед транспортным средством-носителем MVS находятся движущиеся впереди транспортные средства PV1, PV2 с прогнозируемыми воротами для проезда, которые соответствуют целевой группе ворот для проезда (целевые ворота 111(t), 114(t) для проезда) транспортного средства-носителя MVS. В этом случае во втором варианте осуществления вычисляется степень достоверности прогнозирования Ωg для каждого из движущихся впереди транспортных средств PV1, PV2 (этап S7b).
[0080] На Фиг.7 степень достоверности прогнозирования Ωg того, что движущееся впереди транспортное средство PV1 проедет через ворота 111, представлена кружком Ω11. Кроме того, степень достоверности прогнозирования Ωg того, что движущееся впереди транспортное средство PV2 проедет через ворота 113, представлена кружком Ω23, а степень достоверности прогнозирования Ωg того, что движущееся впереди транспортное средство PV2 проедет через ворота 114, представлена кружком Ω24. Размер (диаметр) каждого из кружков Ω11, Ω23, Ω24 представляет величину значения степени достоверности прогнозирования Ωg.
[0081] В это время расстояние перемещения до целевых ворот для проезда (четвертые ворота 114(t)) больше для движущегося впереди транспортного средства PV2, чем для движущегося впереди транспортного средства PV1. Следовательно, дисперсия отклонения C прогнозируемого положения становится больше для движущегося впереди транспортного средства PV1, чем для движущегося впереди транспортного средства PV2, так что степень достоверности прогнозирования Ωg для движущегося впереди транспортного средства PV1 приобретает более высокое значение, чем степень достоверности прогнозирования Ωg для движущегося впереди транспортного средства PV2.
[0082] То есть вероятность того, что движущееся впереди транспортное средство PV2 проедет через четвертые ворота 114(t), включенные в целевую группу ворот для проезда, ниже, чем вероятность того, что движущееся впереди транспортное средство PV1 проедет через первые ворота 111(t), включенные в целевую группу ворот для проезда. Кроме того, движущееся впереди транспортное средство PV2 может повернуть на полпути и проехать через ворота 113, не включенные в целевую группу ворот для проезда. Следовательно, выполняется управление следованием с использованием движущегося впереди транспортного средства PV1 с наивысшей степенью достоверности прогнозирования Ωg в качестве цели следования (этап S7b).
[0083] (d) В способе управления автономным движением, выполняемом системой A управления автономным движением, согласно второму варианту осуществления, описанному выше, при получении прогнозируемых ворот для проезда для множества движущихся впереди транспортных средств PV (этап S4b) вычисляется степень достоверности прогнозирования Ωg, которая представляет собой степень достоверности того, что каждое из движущихся впереди транспортных средств PV проедет через прогнозируемые ворота для проезда, и если имеется множество движущихся впереди транспортных средств PV1, PV2, которые имеют прогнозируемые ворота для проезда, которые соответствуют целевым воротам для проезда, движущееся впереди транспортное средство PV1 с наивысшей степенью достоверности прогнозирования Ωg задается в качестве цели следования (этап S7b). Следовательно, можно задать движущееся впереди транспортное средство PV1, которое имеет высокую вероятность движения к целевым воротам для проезда транспортного средства-носителя MVS, в качестве цели следования, чтобы таким образом проехать через целевые ворота для проезда посредством движения со следованием с высокой вероятностью. То есть можно предотвратить задание движущегося впереди транспортного средства PV2, которое, вероятно, будет двигаться к воротам (третьим воротам 113), отличным от целевых ворот для проезда (четвертых ворот 114), в качестве цели следования, тем самым войдя в очередь из транспортных средств с высокой точностью и проехав через целевые ворота для проезда.
[0084] Далее управление проездом через пункт оплаты проезда в третьем варианте осуществления будет описано на основе блок-схемы на Фиг. 8. Третий вариант осуществления представляет собой модифицированный вариант второго варианта осуществления и представляет собой пример, который может учитывать случаи, в которых движущееся впереди транспортное средство PV, заданное в качестве цели следования на основании степени достоверности прогнозирования Ωg, изменяет курс, например направляясь к воротам, которые отличаются от прогнозируемых ворот для проезда.
[0085] Различия между третьим вариантом осуществления и вторым вариантом осуществления заключаются в следующих двух моментах. Первый момент заключается в том, что был добавлен этап S8c, на котором определение выполнения условия сброса цели следования повторяется до тех пор, пока не будет выполнено условие завершения на этапе S6a. Второй момент заключается в том, что даже во время движения по целевому маршруту движения на этапе S7 постоянно определяется наличие или отсутствие движущегося впереди транспортного средства, которое должно быть целью следования, и при обнаружении цели следования выполняется переключение на движение со следованием.
[0086] На этапе S8c, к которому процесс переходит, если условие завершения для определения условия завершения не выполнено на этапе S6a, определяется, выполнено ли условие сброса цели следования. Затем, если условие сброса выполнено, процесс возвращается к этапу S4b, и снова выполняются процессы этапов S4b, S5b, S6b, S7b от получения прогнозируемых ворот для проезда движущихся впереди транспортных средств PV до выполнения движения со следованием. Если условие сброса не выполнено, процесс возвращается к этапу S7b.
[0087] Здесь условие сброса на этапе S8c задается как случай, в котором состояние движения движущегося впереди транспортного средства PV отклоняется от целевого маршрута tL движения, сформированного на карте, по меньшей мере на заданное значение, и случай, в котором время, прошедшее с запуска управления со следованием, превышает предписанное время. Состояние движения движущегося впереди транспортного средства PV, которое отклонилось от целевого маршрута tL движения по меньшей мере на заданное значение, означает случай, в котором положение или ориентация движущегося впереди транспортного средства PV отклонились от целевого маршрута tL движения. В частности, случаи, в которых положение движущегося впереди транспортного средства PV отклонилось от целевого маршрута tL движения, превысив пороговое значение Llim (см. Фиг. 9), и случаи, в которых направление движения движущегося впереди транспортного средства PV отклонилось от направления целевого маршрута tL движения, превысив предписанный угол.
[0088] Если движущееся впереди транспортное средство PV, которое является целью следования, отклоняется от целевого маршрута tL движения, сформированного на карте, существует вероятность того, что движущееся впереди транспортное средство PV изменит курс, то есть существует вероятность того, что движущееся впереди транспортное средство направится к прогнозируемым воротам для проезда, отличным от прогнозируемых ворот для проезда, соответствующих целевым воротам для проезда. В этом случае, показанном на Фиг. 5, пороговое значение Llim для определения того, что транспортное средство отклонилось от целевого маршрута tL движения, ориентированного на прогнозируемые ворота для проезда, устанавливается с учетом вероятности того, что очереди VL1, VL2 из транспортных средств, которые формируются естественным образом, будут отклоняться от целевого маршрута tL движения, сформированного на карте, чтобы учесть этот уровень отклонения. Аналогичным образом, угол для определения того, что движущееся впереди транспортное средство PV отклонилось от целевого маршрута tL движения, устанавливается равным углу, который позволяет очередям VL1, VL2 из транспортных средств ориентироваться в направлении целевых ворот для проезда, таких как показанные на Фиг. 5.
[0089] Кроме того, повторное определение на основании времени, прошедшего с запуска управления со следованием, направлено на то, чтобы учесть изменение курса движущегося впереди транспортного средства PV в качестве цели следования путем выполнения повторного определения с установленным циклом. Посредством задания относительно малого значения цикла выполнения для определения выполнения этого условия сброса возможно быстрое реагирование на изменение курса движущегося впереди транспортного средства PV. С другой стороны, если цикл установлен слишком коротким, вполне вероятно, что движущееся впереди транспортное средство PV, которое является целью следования, будет часто переключаться, что может привести к изменениям в поведении транспортного средства или чрезмерной вычислительной нагрузке, так что цикл устанавливается достаточно длительным, чтобы предотвратить такие неблагоприятные эффекты. В частности, цикл предпочтительно находится в диапазоне от примерно 0,1 до 1 секунды.
[0090] Теперь на основе Фиг. 9 будет описано действие третьего варианта осуществления. На Фиг. 9 проиллюстрирован случай, когда осуществляется следование за движущимся впереди транспортным средством PV1, для которого имеется высокая вероятность того, что ворота 114 (круг Ω11 с цепочкой двойной пунктирной линии) будут прогнозируемыми воротами для проезда, движущееся впереди транспортное средство PV1 вместо этого направляется к третьим воротам 113, которые не включены в целевую группу ворот для проезда.
[0091] Как показано на Фиг. 9, когда расстояние между движущимся впереди транспортным средством PV1 и целевым маршрутом tL движения, ориентированным на целевые ворота для проезда (четвертые ворота 114(t)), превышает пороговое значение Llim, или когда определение условия сброса выполняется в этот момент времени, условие сброса выполнено. На Фиг. 9 степень достоверности прогнозирования, когда четвертые ворота 114 вычислены как прогнозируемые ворота для проезда движущегося впереди транспортного средства PV1, обозначена кругом Ω11 с цепочкой двойной пунктирной линии, и после этого степень достоверности прогнозирования, когда третьи ворота 113 вычислены как прогнозируемые ворота для проезда, обозначена кругом Ω11 со сплошной линией.
[0092] В этом случае, поскольку больше нет движущегося впереди транспортного средства PV, прогнозируемые ворота для проезда которого включены в целевую группу ворот для проезда, движение со следованием завершается и выполняется управление движением по целевому маршруту tL движения (процесс переходит от S6b к S7). Таким образом, даже если движущееся впереди транспортное средство PV1, установленное в качестве цели следования, изменяет курс, можно перейти к желаемым целевым воротам для проезда (четвертые ворота 114(t)).
[0093] (d) В способе управления автономным движением, выполняемом системой A управления автономным движением согласно третьему варианту осуществления, описанному выше, если выполняется следование за движущимся впереди транспортным средством PV (этап S7b), после определения, выполнено ли условие сброса цели следования (этап S8c), причем условие сброса включает в себя случаи, в которых состояние движения движущегося впереди транспортного средства PV, установленного как цель следования, отклоняется от целевого маршрута tL движения по меньшей мере на предписанную величину, и если условие сброса выполнено, снова выполняются этапы (этапы S4b, S5b, S6b, S7b) от получения прогнозируемых ворот для проезда для одного или множества движущихся впереди транспортных средств PV, движущихся впереди транспортного средства-носителя MVS, до выполнения движения со следованием с использованием движущегося впереди транспортного средства PV как цели следования. Следовательно, даже если движущееся впереди транспортное средство PV1, заданное в качестве цели следования, изменяет курс в направлении, отличном от направления к целевым воротам для проезда, можно надежно направить транспортное средство-носитель MVS к целевым воротам 114(t) для проезда.
[0094] Способ управления автономным движением и система управления автономным движением согласно настоящему изобретению были описаны выше на основе вариантов осуществления. Однако конкретные конфигурации не ограничены этими вариантами осуществления, и различные изменения и дополнения к конструкции могут быть выполнены без выхода за рамки объема изобретения согласно каждому пункту формулы изобретения.
[0095] Например, в вариантах осуществления были показаны примеры, в которых двое ворот (первые ворота 111, четвертые ворота 114) задаются в качестве целевых ворот для проезда при задании ворот для проезда транспортного средства-носителя MVS, но количество целевых ворот для проезда не ограничено «двумя». Например, если количество ворот на пункте оплаты проезда или количество подходящих для проезда типов ворот невелико, могут быть случаи, когда количество целевых ворот для проезда может быть равно 1, что меньше 2. И наоборот, если количество ворот на пункте оплаты проезда или количество подходящих для проезда типов ворот велико, количество целевых ворот для проезда может быть установлено равным трем или более.
[0096] Кроме того, в третьем варианте осуществления условиями сброса были предписанный цикл и отклонение от целевого маршрута tL движения, превышающие пороговое значение Llim и предписанный цикл, но допустимо и использование только одного из них.




Изобретение относится к способу и системе управления автономным движением. Способ управления автономным движением, осуществляемый системой управления автономным движением с использованием контроллера, который выполняет управление автономным движением для побуждения транспортного средства-носителя двигаться по целевому маршруту движения, сформированному на карте. Способ содержит этапы, на которых задают одни или множество целевых ворот для проезда из множества ворот на пункте оплаты проезда при движении по целевому маршруту движения, определяют, имеется ли вблизи упомянутого пункта оплаты проезда затор на дороге в области пункта оплаты проезда или перед ней, выполняют управление автономным движением по целевому маршруту движения, если затор на дороге отсутствует, определяют наличие или отсутствие по меньшей мере одного движущегося впереди транспортного средства, движущегося впереди транспортного средства-носителя, для которого имеются прогнозируемые ворота для проезда, которые соответствуют целевым воротам для проезда для транспортного средства-носителя. Если имеется затор на дороге, выполняют движение со следованием с использованием движущегося впереди транспортного средства в качестве цели следования, для которого имеются прогнозируемые ворота для проезда, которые соответствуют целевым воротам для проезда, и выполняют управление автономным движением, если имеется затор на дороге, а движущееся впереди транспортное средство, для которого имеются прогнозируемые ворота для проезда, которые соответствуют целевым воротам для проезда, отсутствует. Достигается повышение безопасности управления транспортным средством. 2 н. и 3 з.п. ф-лы, 9 ил.
1. Способ управления автономным движением, осуществляемый системой управления автономным движением с использованием контроллера, который выполняет управление автономным движением для побуждения транспортного средства-носителя двигаться по целевому маршруту движения, сформированному на карте, содержащий этапы, на которых:
задают одни или множество целевых ворот для проезда, через которые планируется проезд транспортного средства-носителя, из числа множества ворот на пункте оплаты проезда при проезде через пункт оплаты проезда при движении по целевому маршруту движения;
определяют, имеется ли вблизи упомянутого пункта оплаты проезда затор на дороге, в том числе в области пункта оплаты проезда или перед ней;
выполняют управление автономным движением для побуждения транспортного средства-носителя двигаться по целевому маршруту движения, если затор на дороге отсутствует;
определяют наличие или отсутствие по меньшей мере одного движущегося впереди транспортного средства, движущегося впереди транспортного средства-носителя, для которого имеются прогнозируемые ворота для проезда, которые соответствуют целевым воротам для проезда для транспортного средства-носителя, если имеется затор на дороге;
выполняют движение со следованием с использованием движущегося впереди транспортного средства в качестве цели следования, если имеется затор на дороге и движущееся впереди транспортное средство, для которого имеются прогнозируемые ворота для проезда, которые соответствуют целевым воротам для проезда; и
выполняют управление автономным движением для побуждения транспортного средства-носителя двигаться по целевому маршруту движения, если имеется затор на дороге, а движущееся впереди транспортное средство, для которого имеются прогнозируемые ворота для проезда, которые соответствуют целевым воротам для проезда, отсутствует.
2. Способ управления автономным движением по п. 1, дополнительно содержащий этапы, на которых:
если имеется затор на дороге, при определении наличия или отсутствия движущегося впереди транспортного средства, для которого имеются прогнозируемые ворота для проезда, которые соответствуют целевым воротам для проезда, вычисляют степень достоверности прогнозирования того, что движущееся впереди транспортное средство проедет через прогнозируемые ворота для проезда, и
устанавливают движущееся впереди транспортное средство с наивысшей степенью достоверности прогнозирования в качестве цели для выполнения движения со следованием до тех пор, пока транспортное средство-носитель не проедет через целевые ворота для проезда, если имеется множество движущихся впереди транспортных средств, которые имеют прогнозируемые ворота для проезда, которые соответствуют целевым воротам для проезда.
3. Способ управления автономным движением по п. 1 или 2, в котором
определяют, выполнено ли условие сброса цели следования при следовании за движущимся впереди транспортным средством, причем условие сброса включает в себя случай, в котором состояние движения движущегося впереди транспортного средства, заданного в качестве цели следования, отклоняется от целевого маршрута движения на предписанную величину или более, и
повторно выполняют процесс от получения прогнозируемых ворот для проезда движущегося впереди транспортного средства до выполнения движения со следованием по отношению к цели следования после определения, что условие сброса выполнено.
4. Способ управления автономным движением по любому из пп. 1-3, в котором определяют, что имеется затор на дороге, если скорость транспортного средства для транспортного средства-носителя или прогнозируемая скорость транспортного средства для транспортного средства-носителя меньше или равны предписанной скорости транспортного средства, и
определяют, что затор на дороге отсутствует, если скорость транспортного средства для транспортного средства-носителя или прогнозируемая скорость транспортного средства для транспортного средства-носителя превышает предписанную скорость транспортного средства.
5. Система управления автономным движением, содержащая:
контроллер, который выполняет управление автономным движением для приведения в действие исполнительного механизма, который управляет состоянием движения транспортного средства-носителя, чтобы побудить транспортное средство-носитель двигаться по целевому маршруту движения, сформированному на карте, на основании информации об окружении транспортного средства-носителя и информации, относящейся к движению транспортного средства-носителя, при этом
контроллер включает в себя
блок задания целевых ворот для проезда, выполненный с возможностью задания одних или множества целевых ворот для проезда, через которые планируется проезд транспортного средства-носителя, из множества ворот пункта оплаты проезда, при проезде через пункт оплаты проезда при движении по целевому маршруту движения,
блок определения прогнозируемых ворот для проезда, выполненный с возможностью получения прогнозируемых ворот для проезда по меньшей мере для одного движущегося впереди транспортного средства, которое движется впереди транспортного средства-носителя,
блок определения наличия/отсутствия движущегося впереди транспортного средства, выполненный с возможностью определения наличия или отсутствия движущегося впереди транспортного средства, для которого имеются прогнозируемые ворота для проезда, которые соответствуют целевым воротам для проезда для транспортного средства-носителя, и
блок управления движением со следованием, выполненный с возможностью управления исполнительным механизмом для выполнения движения со следованием с использованием движущегося впереди транспортного средства в качестве цели следования, и
контроллер дополнительно имеет блок определения затора на дороге, выполненный с возможностью определения, имеется ли затор на дороге вблизи пункта оплаты проезда, в том числе в области пункта оплаты проезда или перед ней, при проезде через пункт оплаты проезда при движении по целевому маршруту движения,
контроллер выполнен с возможностью:
выполнения управления автономным движением для побуждения транспортного средства двигаться по целевому маршруту движения при определении блоком определения затора на дороге, что затор на дороге отсутствует,
при определении блоком определения затора на дороге, что имеется затор на дороге, на основании определения прогнозируемых ворот для проезда для движущегося впереди транспортного средства посредством блока определения прогнозируемых ворот для проезда и определения наличия или отсутствия движущегося впереди транспортного средства, для которого имеются прогнозируемые ворота для проезда, которые соответствуют целевым воротам для проезда для транспортного средства-носителя, посредством блока определения наличия/отсутствия движущегося впереди транспортного средства, он выполняет движения со следованием, если имеется затор на дороге и движущееся впереди транспортное средство, для которого имеются прогнозируемые ворота для проезда, которые соответствуют целевым воротам для проезда, с использованием движущегося впереди транспортного средства в качестве цели следования, и
с другой стороны, он выполняет управление автономным движением для побуждения транспортного средства двигаться по целевому маршруту движения, если имеется затор на дороге, а движущееся впереди транспортное средство, для которого имеются прогнозируемые ворота для проезда, которые соответствуют целевым воротам для проезда, отсутствует.
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| US 9218739 B2, 22.12.2015 | |||
| УСТРОЙСТВО ПОМОЩИ В ВОЖДЕНИИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ В ВОЖДЕНИИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2624373C1 |

