Способ относится к области технических средств обеспечения безопасности мореплавания в условиях сложной ледовой обстановки.
Согласно мировой практике, в большинстве случаях суда попадают в ледовый плен из-за отсутствия надежных данных о ледовой обстановке на пути следования.
В морском льду, как и в любой упругой среде, возможно распространение акустических волн. Это свойство, в случае наличия границ раздела сред с различным акустическим волновым сопротивлением Z, определяемым выражением: Z=ρc, где ρ - плотность какой-либо среды, с - скорость звука в ней, позволяет, при известной скорости звука, измерить толщину этой среды. Требование учета различия волновых сопротивлений сред при оценке результата связано с необходимостью получения сигнала, отраженного от границы их раздела. В этом случае возможно измерение толщины при наличии доступа только к одной границе раздела. Измерения толщины могут проводить путем излучения акустического импульса в исследуемую среду с последующим измерением времени распространения звука от одной границы раздела до другой и обратно. Тогда толщина исследуемой среды "h" определяется как h=ct/2, где t - время распространения звука. Измерение толщины льда таким способом из воздушной среды требует непосредственного контакта акустического излучателя со льдом. Это связано с несравнимо большим волновым сопротивлением льда по сравнению с воздушной средой. При больших отличиях волновых сопротивлений первой и второй сред модуль коэффициента отражения звука "К" равен K=(ρ1c1-ρ2c2)/(ρ1c1+ρ2c2) и близок к единице, т.е. звук практически полностью отражается от границы раздела и не проникает во вторую среду.
Погрешность измерения толщины льда определяется, в основном, изменчивостью скорости звука. Известно [Г.А. Лебедев, К.К. Сухоруков Распространение электромагнитных и акустических волн в морском льду. Санкт-Петербург, Гидрометеоиздат, 2001], что величина скорости звука в морском льду зависит, в основном, от его плотности, температуры и солености. Диапазон ее изменчивости составляет ≈3800÷3200 м/с, что позволяет измерять толщину льда с погрешностью ≈15%. С привлечением данных о температуре поверхности льда ошибка уменьшится до 10%, а при известном возрасте льда станет еще меньше.
Общеизвестным способом определения ледовой обстановки является непосредственно визуальный, фотокиносъемка, радиолокационное зондирование, а также пассивное инфракрасное видение, проводимые с борта пилотируемого вертолета. Техническими средствами и наблюдением можно определить такие важные для плавания во льдах параметры, как сплоченность льда, торосистость, возраст, а также направление и скорость его дрейфа. Основными недостатками последнего способа определения ледовой обстановки является необходимость применения пилотируемого вертолета, базирующегося на борту судна. Использование пилотируемого летательного аппарата, базирующегося на судне, в сложных погодных условиях высоких широт сопряжено с риском для жизни экипажа и утратой дорогостоящей техники. Кроме того, содержание летного экипажа и высокая стоимость технического обслуживания вертолета существенно снижают экономическую эффективность ледовой разведки.
Известен способ, приведенный в патенте РФ №2442106, заключающийся в том, что с помощью ультразвукового преобразователя возбуждают в изделии ультразвуковой импульс, принимают эхо-импульсы, многократно отраженные от противоположных поверхностей материала изделия, вычисляют нормированную автокорреляционную функцию от стробированной части принятой последовательности импульсов, искомую толщину изделия определяют путем умножения половины аргумента автокорреляционной функции, при котором она принимает максимальное значение, на известную скорость ультразвука в материале изделия.
Недостатком вышеприведенного способа является ограничение по способу перемещения оборудования к месту измерений, поскольку требуется измерять толщину льда по ходу движения судна в ледовых условиях.
Известен способ использования беспилотного аппарата вертолетного типа для определения ледовой обстановки, приведенный в патенте РФ №2425400 «Способ разведки ледовой обстановки с авиасредств», принятый за прототип, сущность которого заключается в следующем: с обеспечивающего судна, например, лидирующего в транспортном караване ледокола, высылают по планируемому маршруту движения каравана два беспилотных летательных аппарата - ведущий аппарат №2, которому задают верхний эшелон полета, и ведомый аппарат №1 с нижним эшелоном полета. Ведомый аппарат ведет разведку при помощи установленного на нем оборудования видеофотосъемки и радара. Необходимость использования аппарата №2 обоснована малой высотой полета аппарата №1, прямая связь которого с судном на удалениях более нескольких десятков километров затруднительна. Аппарат №2, используемый в качестве ретранслятора, решает проблему дальней связи. Генеральное направление полета аппаратов задают с обеспечивающего судна в соответствии с планируемым маршрутом его движения и оперативными данными разведки, получаемыми по радиоканалу.
Недостатком в данном способе ледовой разведки является отсутствие возможности объективной оценки такого важного для судоходства параметра, как толщина льда. При использовании традиционных методов оптической и радарной съемки данные о толщине льда получают из оценок возраста льда. При этом принципиально не могут быть учтены многие факторы, влияющие на скорость льдообразования. Полученные таким способом данные о толщине льда содержат долю субъективной составляющей, зависящей от опыта и профессионализма исследователя, обрабатывающего данные видеорадарной съемки.
Технической задачей заявляемого способа является устранение указанного недостатка, а именно: увеличение достоверности данных о толщине льда при ледовой разведке путем непосредственного контактного измерения этого параметра, т.е. увеличение информативности и точности известного способа разведки ледовой обстановки с авиасредств путем исключения субъективности при интерпретации получаемых данных.
Поставленная задача достигается тем, что в известном способе разведки ледовой обстановки с использованием телеуправляемых беспилотных летательных аппаратов, включающем передачу от них на обеспечивающее судно по радиоканалу связи полученных ими данных о ледовой обстановке по курсу движения каравана судов, при этом указанную разведку выполняют двумя беспилотными летательными аппаратами, первым из которых, оборудованным видео/радио аппаратным комплексом, производят непосредственное определение характеристик ледовой обстановки по курсу судов и передачу по каналу связи полученных данных на обеспечивающее судно через второй беспилотный летательный аппарат, являющийся летательным аппаратом-ретранслятором, в отличие от него, в заявляемом способе первый беспилотный летательный аппарат используют с установленным дополнительно на нем измерительным акустическим аппаратно-программным комплексом с излучающими акустическими антеннами для выполнения измерений ультразвуковым методом толщины льда путем непосредственного контакта антенн этого летательного аппарата со льдом, при этом, поднимая с борта судна данные летательные аппараты и выводя их посредством использования радиоканала на курс движения судов, задают высотные эшелоны полета, отвечающие требованиям по качеству связи и получаемых данных. Устанавливают посредством видео/радио аппаратного комплекса данного первого беспилотного летательного аппарата характеристики масштабов неоднородности ледовых полей, данные о которых через аппарат-ретранслятор передают на обеспечивающее судно и при необходимости производства измерений толщины льда намечают требуемое число точек его непосредственного контактного измерения, а также и их распределение по курсу движения судов в реальном времени, и при осуществлении измерений телеуправляемо подводят первый беспилотный летательный аппарат к необходимой точке измерений, производят его посадку на поверхность льда, осуществляют непосредственный контакт со льдом излучающих антенн его аппаратно-программного комплекса и начинают измерения. Процесс измерения осуществляют двумя режимами, в первом из которых посредством аппаратно-программного комплекса производят зондирование короткими акустическими импульсами с высокочастотным заполнением, осуществляя режим прямого высокочастотного зондирования, и производят прием отраженных импульсов высокочастотной антенной, при этом аппаратно измеряют время пробега высокочастотного импульса от верхней поверхности льда и обратно, получая при этом в аппаратно-программном комплексе величину двойной толщины льда, в случае же отсутствия в аппаратно-программном комплексе сигнального импульса от нижней поверхности льда включают второй, параметрический режим измерений, в котором двумя задействованными, контактирующими со льдом высокочастотной и низкочастотной акустическими антеннами с совмещенными их диаграммами направленности излучают два радиоимпульса, из которых первый используют заполненным немодулированной высокой частотой, а несущую низкую частоту второго радиоимпульса используют модулированной сложным, шумоподобным сигналом, получая таким путем параметрические гармоники и суммарные и разностные частоты, и при этом, при происходящем затухании высокочастотных составляющих, низкочастотные составляющие, модулированные сложным сигналом, которые распространяются до нижней поверхности льда, в этом режиме аппаратно воспринимают, осуществляя их прием низкочастотной антенной, а информационный параметр в аппаратно-программном комплексе, выраженный в виде показания задержки времени сигнала на распространение в толще льда, определяют корреляционной его обработкой, результаты которой фиксируют в аппаратно-программном комплексе измеряемую толщину льда в этом режиме. Затем отправляют полученные результаты измерений по каналу связи оператору на судно, при этом результаты измерений представляют в виде карты толщин ледового поля либо в виде единичного результата, который используют при ледовой проводке судов по данному курсу.
Целесообразно использовать беспилотный летательный аппарат в виде телеуправляемого аппарата вертолетного типа, в форме обычного квадрокоптера, выполненного на традиционной Х-образной раме с 8-ю стандартными несущими винтами и со схемой управления полетом аппарата типа DJI А-2, обладающего временем автономного полета до 50 мин, который хорошо зарекомендовал себя в научно-практической экспедиции Дальневосточного плавучего университета в 2013 г.
Частоту радиоканала для управления полетом аппаратов надежно используют размером F-2,4 ГГц, частоту радиоканала для качественной видеосвязи используют размером F-1,2 ГГц. Причем первая частота радиоканала выбрана исходя из списка существующих радиочастот, а видеотракт выбран более низкого диапазона, в отличие от тракта радиоуправления, чтобы максимально повысить дальность передачи видеоизображения, передаваемого как при телеуправляемом полете, так и автономном.
Частоту ультразвуковых излучений аппаратно-программного комплекса применяют величиной F-120 кГц, которая соответствует техническим характеристикам используемой аппаратуры.
При использовании прямого высокочастотного зондирования режима измерений применяют такое измерительное оборудование, при котором измеряют толщину льда «Н» вплоть до значений Н≤0,5 м, а погрешность измерений при этом не превышает 10%.
При использовании параметрического режима измерений применяют такое измерительное оборудование, при котором измеряют толщину льда «Н» до значений, равных и превышающих величину Н≥3 м, а погрешность измерений при этом также не превышает 10%.
Вес установленного на первом беспилотном летательном аппарате акустического измерителя толщины льда «М» не превышает величину М≤2 кг, что является минимальной массой для используемого измерителя.
Заявляемые ограничительные и отличительные признаки обеспечивают достижение поставленной технической задачи.
Использование первого беспилотного летательного аппарата, снабженного измерительным акустическим аппаратно-программным комплексом с излучающими акустическими антеннами, обеспечивает выполнение измерений ультразвуковым методом толщины льда при непосредственном, в отличие от известного решения-прототипа, контакте со льдом антенн этого аппаратно-программного комплекса посаженного на лед данного телеуправляемого летательного аппарата, передающего через второй беспилотный летательный аппарат полученные и корреляционно обработанные его аппаратно-программным комплексом результаты излучающих измерений на обеспечивающее судно. Этим достигается увеличение достоверности данных о толщине льда, в отличие от неконтактных ее оценок, увеличение информативности и точности ледовой разведки с авиасредств. При этом сами измерения в намечаемых предварительно точках производят по необходимости в зависимости от результатов предварительного определения характеристик масштабов неоднородности ледовых полей, определяемых посредством видео/радио аппаратного комплекса первого летательного аппарата и передаваемых через аппарат ретранслятор на обеспечивающее судно. Это предотвращает излишние неоправданные экономические затраты заявляемого способа ледовой разведки, использующего видео/радио, аппаратно-программный комплекс беспилотного телеуправляемого аппарата.
Беспилотный летательный аппарат в виде телеуправляемого аппарата вертолетного типа в форме обычного квадрокоптера, выполненного на традиционной Х-образной раме с 8-ю стандартными несущими винтами и со схемой управления полетом аппарата типа DJI А-2, обладающего временем автономного полета до 50 мин, выбран, поскольку 8 винтов обеспечивают наиболее большее тяговое усилие по сравнению с вариантами с меньшим количеством винтов, а полетный контроллер имеет проверенные на практике все возможности, необходимые для практического осуществления поставленной задачи.
Частоту радиоканала для управления полетом аппаратов надежно используют размером F - 2,4 ГГц, которая выбрана из стандартной сетки частот и имеет достаточную ширину канала для осуществления наиболее точного управления БЛА, а частоту радиоканала для обеспечения наиболее качественной видеосвязи используют размером F - 1,2 ГГц, которая выбрана из стандартной сетки частот и имеет достаточную ширину канала для осуществления надежной видеосвязи. Видеотракт выбран более низкого диапазона, в отличие от тракта радиоуправления, чтобы максимально повысить дальность передачи видеоизображения, передаваемого как при телеуправляемом полете, так и автономном, т.е. обеспечить экономическую эффективность способа.
Частоту ультразвуковых излучений аппаратно-программного комплекса применяют величиной F - 120 кГц, которая соответствует техническим характеристикам используемой аппаратуры и обеспечивает наиболее качественное измерение требуемых параметров льда.
При использовании прямого высокочастотного зондирования режима измерений применяют такое измерительное оборудование, которое позволяет измерять толщину льда «Н», покрывающего значительную северную акваторию страны, вплоть до значений Н≤0,5 м, а погрешность измерений при этом не превышает 10%.
При использовании параметрического режима измерений применяют такое измерительное оборудование которое позволяет измерять толщину льда «Н» до значений, характерных для полярных широт страны (северно-морской путь), равных и превышающих величину Н≥3 м, а погрешность измерений при этом также не превышает 10%.
Вес установленного на первом беспилотном летательном аппарате акустического измерителя толщины льда «М» не превышает величину М≤2 кг, что является минимальной массой для используемого измерителя, а летно-технические характеристики БЛА позволяют доставлять его к точке измерений без каких-либо проблем.
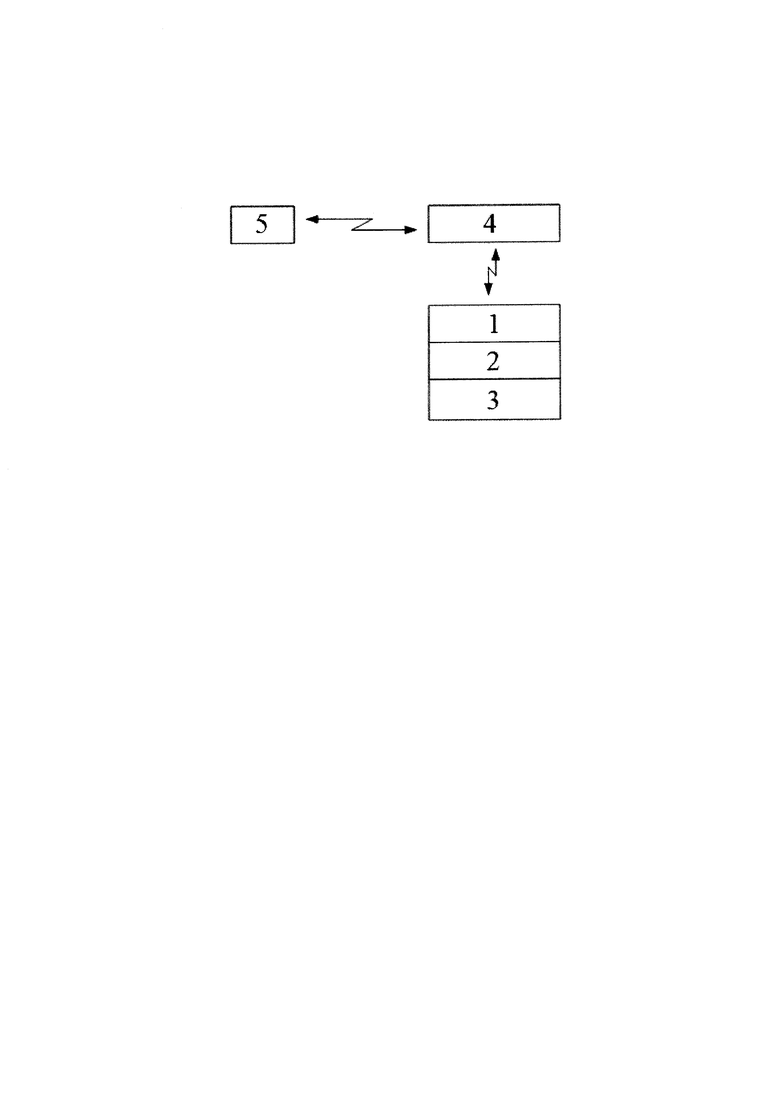
На чертеже представлена структурная схема комплекса, реализующего заявляемый способ ледовой разведки.
Комплекс ледовой разведки, реализующей заявленный способ, содержит телеуправляемый беспилотный летательный аппарат вертолетного типа (далее БЛА1) (1), который используют в форме традиционного квадрокоптера (не показано), выполненного на традиционной "Х"-образной раме с 8-ю стандартными несущими винтами и со схемой управления полетом аппарата типа DJI А-2 (не показано), обладающего временем автономного полета до 50 мин. Он несет традиционный для авиаразведки видео/радио аппаратно-программный комплекс (далее АПК1) (2), дополненный измерительным акустическим аппаратно-программным комплексом 2 (АПК2) (3), вес которого не превышает 2 кг, для измерения толщины льда, характеризующийся глубиной измеряемой толщины льда "Н" Н≥3 м. Для управления полетом БЛА1 (1) связан радиоканалом с частотой F - 2.4 ГГц, с БЛА2 (4), выполняющим роль ретранслятора. БЛА2 (4) осуществляет также двухстороннюю радиосвязь с этой же частотой с судном обеспечения (5) в реальном времени.
Судно (5) обеспечения телеуправляет маршрутом движения БЛА1 (1) и БЛА2 (4), используя видеосвязь с частотой F - 1.2 ГГц, и определяет, в соответствии с предварительно получаемыми данными АПК1 (2) о ледовой обстановке по курсу судов, точки трассы, в которых совершенно определенно требуется измерить толщину льда с использованием АПК2 (3). При этом частота радиоканала "F", равная 2.4 ГГц, выбрана исходя из списка существующих радиочастот, а видеотракт F - 1,2 ГГц выбран более низкого диапазона, в отличие от тракта радиоуправления, чтобы максимально повысить дальность передачи видеоизображения, передаваемого как при телеуправляемых полетах, так и при автономном.
Работу комплекса ледовой разведки осуществляют следующим порядком. При следовании судна (каравана судов) в сложной ледовой обстановке, требующей ледовой разведки, с борта соответствующего судна поднимают телеуправляемые БЛА1 (1) и БЛА2 (4), выводят их на маршрут и задают высотные эшелоны полета, отвечающие, благодаря используемым частотам радиосвязи, требованиям по качеству связи и получаемых данных. Устанавливают посредством видео/радио АПК1 (2) характеристики масштабов неоднородности ледовых полей, данные о которых через БЛА 2 (4) передают на обеспечивающее судно (5), и при необходимости определения толщины льда производят посадку БЛА1 (1) на лед для осуществления непосредственного акустического контакта с ним акустической антенны (не показано). При этом требуемое число точек с измерениями толщины льда и их распределение по маршруту устанавливают по необходимости в зависимости от масштабов неоднородностей ледовых полей, определяемых предварительно, причем их устанавливают в реальном времени.
При необходимости данного производства измерений толщины льда намечают требуемое число точек его непосредственного контактного измерения, а также и их распределение по курсу движения судов в реальном времени, и при осуществлении измерений телеуправляемо подводят первый беспилотный летательный аппарат (БЛА1) (1) к необходимой точке измерений (не показано), производят его посадку на поверхность льда, осуществляют непосредственный контакт со льдом излучающих антенн (не показано) его аппаратно-программного комплекса (АПК2) (3) и начинают измерения. Процесс измерения осуществляют двумя режимами, в первом из которых посредством данного аппаратно-программного комплекса производят зондирование короткими акустическими импульсами с высокочастотным заполнением, осуществляя режим прямого высокочастотного зондирования, и производят прием отраженных импульсов высокочастотной антенной (не показано), при этом аппаратно измеряют время пробега высокочастотного импульса от верхней поверхности льда (не показано) и обратно, получая при этом в данном аппаратно-программном комплексе величину двойной толщины льда. В случае же отсутствия в аппаратно-программном комплексе сигнального импульса от нижней поверхности льда (не показано) включают второй, параметрический режим измерений, в котором двумя задействованными, контактирующими со льдом указанными высокочастотной и низкочастотной акустическими антеннами с совмещенными их диаграммами направленности излучают два радиоимпульса, из которых первый используют заполненным немодулированной высокой частотой, а несущую низкую частоту второго радиоимпульса используют модулированной сложным, шумоподобным сигналом, получая таким путем параметрические гармоники и суммарные и разностные частоты. И при этом, при происходящем затухании высокочастотных составляющих, низкочастотные составляющие, модулированные сложным сигналом, которые распространяются до нижней поверхности льда, в этом режиме аппаратно воспринимают, осуществляя их прием низкочастотной антенной, а информационный параметр в аппаратно-программном комплексе, выраженный в виде показания задержки времени сигнала на распространение в толще льда, определяют корреляционной его обработкой, результаты которой фиксируют в аппаратно-программном комплексе измеряемую толщину льда в этом режиме. Затем отправляют полученные результаты измерений по каналу связи оператору на судно (5), при этом результаты измерений представляют в виде карты толщин ледового поля (не показано) либо в виде единичного результата, который используют при ледовой проводке судов по данному курсу.
Таким порядком осуществляют заявленный способ. Достигается возможность увеличения достоверности данных о толщине льда при ледовой разведке и исключается субъективность при интерпретации получаемых данных и излишние неоправданные экономические затраты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ разведки ледовой обстановки с использованием дистанционно управляемых беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2778158C1 |
| СПОСОБ РАЗВЕДКИ ЛЕДОВОЙ ОБСТАНОВКИ НА СЕВЕРНОМ МОРСКОМ ПУТИ | 2018 |
|
RU2694085C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2449326C2 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| Способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ и многофункциональный аппаратно-программный комплекс для его реализации | 2021 |
|
RU2779707C1 |
| ПОИСКОВЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2650298C1 |
| Мобильный судовой комплекс для экологического контроля водной среды | 2017 |
|
RU2709216C2 |
| Способ формирования объектов имитируемой модели фоноцелевой обстановки на необитаемой территории ледового пространства | 2021 |
|
RU2816461C2 |
| СПОСОБ РАЗВЕДКИ ЛЕДОВОЙ ОБСТАНОВКИ С АВИАСРЕДСТВ | 2008 |
|
RU2425400C2 |
| Система многопараметрического мониторинга района техногенной аварии | 2024 |
|
RU2840313C1 |
Изобретение относится к способу разведки ледовой обстановки. Для разведки ледовой обстановки используют два беспилотных летательных аппарата, один из которых производит определение характеристик ледовой обстановки по курсу движения каравана судов, а со второго, который является ретранслятором, осуществляют передачу на обеспечивающее судно по радиоканалу связи полученных данных о ледовой обстановке. Первый летательный аппарат осуществляет измерения установленным на нем измерительным акустическим аппаратно-программным комплексом с излучающими антеннами путем непосредственного их контакта со льдом посредством управляемой посадки, при этом с обеспечивающего судна задают необходимые эшелоны полета, а также намечают необходимое число точек контактного измерения посредством видео/радио аппаратного комплекса данного летательного аппарата. Обеспечивается информативность и точность ледовой разведки. 6 з.п. ф-лы, 1 ил. 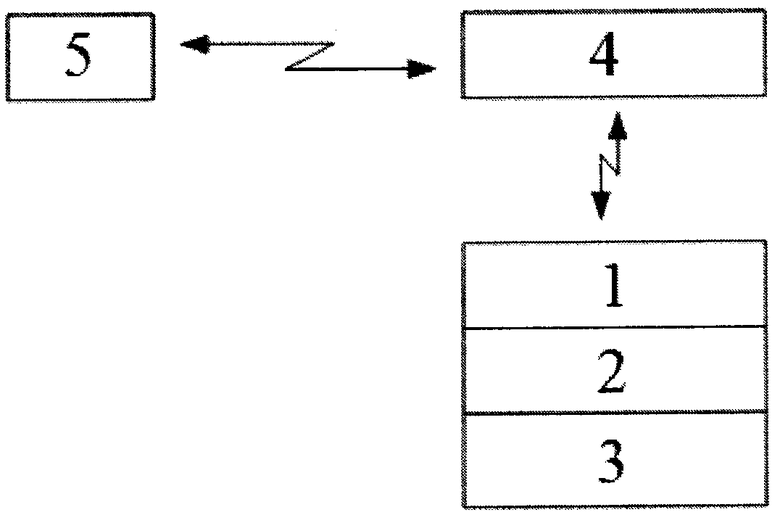
1. Способ разведки ледовой обстановки с использованием телеуправляемых беспилотных летательных аппаратов, включающий передачу от них на обеспечивающее судно по радиоканалу связи полученных ими данных о ледовой обстановке по курсу движения каравана судов, при этом указанную разведку выполняют двумя беспилотными летательными аппаратами, первым из которых, оборудованным видео/радио аппаратным комплексом, производят непосредственное определение характеристик ледовой обстановки по курсу судов и передачу по каналу связи полученных данных на обеспечивающее судно через второй беспилотный летательный аппарат, являющийся летательным аппаратом-ретранслятором, отличающийся тем, что первый беспилотный летательный аппарат используют с установленным дополнительно на нем акустическим аппаратно-программным комплексом с излучающими акустическими антеннами для выполнения измерений ультразвуковым методом толщины льда путем непосредственного контакта антенн этого летательного аппарата со льдом, при этом, поднимая с борта судна данные летательные аппараты, выводят их на курс движения судов и задают высотные эшелоны полета, отвечающие требованиям по качеству связи и получаемых данных; устанавливают посредством видео аппаратного комплекса данного первого беспилотного летательного аппарата характеристики масштабов неоднородности ледовых полей, данные о которых через аппарат-ретранслятор передают на обеспечивающее судно и при необходимости производства измерений толщины льда намечают требуемое число точек его непосредственного контактного измерения, а также и их распределение по курсу движения судов в реальном времени, и при осуществлении измерений телеуправляемо подводят первый беспилотный летательный аппарат к необходимой точке измерений, производят его посадку на поверхность льда, осуществляют непосредственный контакт со льдом излучающих антенн его аппаратно-программного комплекса и начинают измерения; процесс измерения осуществляют двумя режимами, в первом из которых посредством аппаратно-программного комплекса производят зондирование короткими акустическими импульсами с высокочастотным заполнением, осуществляя режим прямого высокочастотного зондирования, и производят прием отраженных импульсов высокочастотной антенной, при этом аппаратно измеряют время пробега высокочастотного импульса от верхней поверхности льда и обратно, получая при этом в аппаратно-программном комплексе величину двойной толщины льда, в случае же отсутствия в аппаратно-программном комплексе сигнального импульса от нижней поверхности льда включают второй, параметрический, режим измерений, в котором двумя задействованными, контактирующими со льдом высокочастотной и низкочастотной акустическими антеннами с совмещенными их диаграммами направленности излучают два радиоимпульса, из которых первый используют заполненным немодулированной высокой частотой, а несущую низкую частоту второго радиоимпульса используют модулированной сложным, шумоподобным сигналом, получая таким путем параметрические гармоники и суммарные и разностные частоты, и при этом, при происходящем затухании высокочастотных составляющих, низкочастотные составляющие, модулированные сложным сигналом, которые распространяются до нижней поверхности льда, в этом режиме аппаратно воспринимают, осуществляя их прием низкочастотной антенной, а информационный параметр в аппаратно-программном комплексе, выраженный в виде показания задержки времени сигнала на распространение в толще льда, определяют корреляционной его обработкой, результаты которой фиксируют в аппаратно-программном комплексе измеряемую толщину льда в этом режиме; затем отправляют полученные результаты измерений по каналу связи оператору на судно, при этом результаты измерений представляют в виде карты толщин ледового поля либо в виде единичного результата, который используют при ледовой проводке судов по данному курсу.
2. Способ разведки ледовой обстановки по п. 1, отличающийся тем, что беспилотный летательный аппарат используют в виде телеуправляемого аппарата вертолетного типа в форме обычного квадрокоптера, выполненного на традиционной Х-образной раме с 8-ю стандартными несущими винтами и со схемой управления полетом аппарата типа DJI А-2, обладающего временем автономного полета до 50 мин.
3. Способ разведки ледовой обстановки по п. 1, отличающийся тем, что частоту радиоканала для управления полетом используют размером F - 2,4 ГГц, частоту радиоканала для видеосвязи используют размером F - 1,2 ГГц.
4. Способ разведки ледовой обстановки по п. 1, отличающийся тем, что частоту ультрозвуковых излучений аппаратно-программного комплекса применяют величиной F - 120 кГц.
5. Способ разведки ледовой обстановки по п. 1, отличающийся тем, что при использовании режима прямого высокочастотного зондирования режима измерений измеряют толщину льда «Н» вплоть до значений Н≤0,5 м, погрешность измерений при этом не превышает 10%.
6. Способ разведки ледовой обстановки по п. 1, отличающийся тем, что при использовании параметрического режима измерений измеряют толщину льда «Н» до значений, равных и превышающих величину Н≥3 м, погрешность измерений при этом также не превышает 10%.
7. Способ разведки ледовой обстановки по п. 1, отличающийся тем, что вес установленного на первом беспилотном летательном аппарате измерителя толщины льда «М» не превышает величину М≤2 кг.
| Спосб изготовления напильников | 1958 |
|
SU123393A1 |
| RU 2014141127 A, 10.05.2016 | |||
| 0 |
|
SU153808A1 | |
| 0 |
|
SU83140A1 | |
| WO 2012162310 A1, 29.11.2012 | |||
| US 20140062764 A1, 06.03.2014. | |||

