Предлагаемое изобретение относится к области радиолокации и радионавигации в части их использования для определения дальности и радиальной скорости объекта, излучающего электромагнитные волны. Предложенный способ может использоваться для определения дальности и радиальной скорости объекта излучающего электромагнитные волны при решении технических и физических задач.
Известны следующие способы определения дальности и радиальной скорости объекта с помощью приемника электромагнитных волн (ПЭВ) [1, 2]:
1. Угломерный способ определения дальности объекта и его радиальной скорости с помощью ПЭВ. В этом способе искомые параметры определяются при помощи двух (или более) пассивных ПЭВ, разнесенных на расстояние.
Если объект и два ПЭВ расположены в горизонтальной (вертикальной) плоскости, достаточно найти 2 азимута (2 угла места), а определение дальности осуществляется решением треугольника. Для определения координат объекта в общем случае необходимо измерить не менее 3 угловых координат. Скорость объекта определяется по результатам измерения наклонной дальности в различные моменты времени.
2. Разностно-дальномерный способ определения дальности. Он предусматривает измерение разностей расстояний от излучаемого объекта до ПЭВ. Для определения координат объекта на плоскости требуется определить не менее двух значений разности расстояний, для чего необходимо иметь по крайней мере 3 разнесенных ПЭВ. Местоположение объекта определяется точкой пересечения гипербол, соответствующих измеренным разностям расстояний, с фокусами в точках расположения ПЭВ.
3. Угломерно-разностно-дальномерный способ определения дальности. Он является комбинацией первых двух и заключается в определении направлений и разности расстояний от объекта до ПЭВ. При этом способе надо иметь не менее двух ПЭВ. Определение плоскостных координат объекта обеспечивается измерением одной угловой координаты и разности расстояний.
Однако известные способы обладают следующими недостатками:
1 - эти способы не однопозиционные,
2 - для определения дальности и радиальной скорости объекта необходимо несколько ПЭВ.
Указанные недостатки приводят к усложнению конструкции измерительной системы и повышению ее стоимости, а также к снижению живучести системы.
Также известен способ определения дальности и скорости двухпозиционным одиночным ПЭВ.
Этот способ реализован в патенте US 5420827 A «Passive multipath target range and depth estimation using a variable depth sonar», где пассивный акустический локатор с переменной глубиной погружения, который определяет расстояние до цели и глубину ее погружения по многоходовой оценке ее акустического излучения. Применяется новый способ оценки, при котором не требуются приемники больших размеров с большим объемом вычислений. Отличительной особенностью способа является изменение глубины погружения приемника акустического локатора, установленного на подвижной платформе. Объединение измерений, полученных на двух глубинах погружения приемника по определенному алгоритму, дает как дальность, так и глубину погружения цели. Недостатком этого способа является необходимость измерений минимум на двух глубинах погружения. Таким образом, в предложенном способе используется одиночный ПЭВ, но метод не является однопозиционным, т.е. для получения значения дальности позицию ПЭВ необходимо менять.
Однако этот способ обладает следующими недостатками: он не является однопозиционным и требует измерений в различных позициях, что повышает время определения дальности и скорости объекта, что приводит к понижению надежности измерений и живучести измерительной системы.
Из известных технических решений наиболее близким по технической сущности к заявляемому способу является способ пассивного измерения пространственных координат движущегося объекта, описанный в работе [3] в 2013 году. Этот способ выбран в качестве прототипа.
Сущность прототипа состоит в том, что для пассивного измерения пространственных координат движущегося объекта производится оценка пеленга и угла места объекта в процессе сопровождения объекта и одновременно производится измерение уровней принимаемого сигнала (энергии излучения, принимаемого от объекта). Затем данные по пеленгам, углам места и уровням принимаемого сигнала (т.е. три параметра) совместно обрабатываются по определенному алгоритму в вычислительном устройстве. Результатом такой совместной обработки, в частности, является дальность и постоянная радиальная скорость объекта. Необходимым условием работы прототипа является введение дополнительных измерений уровней принимаемого сигнала.
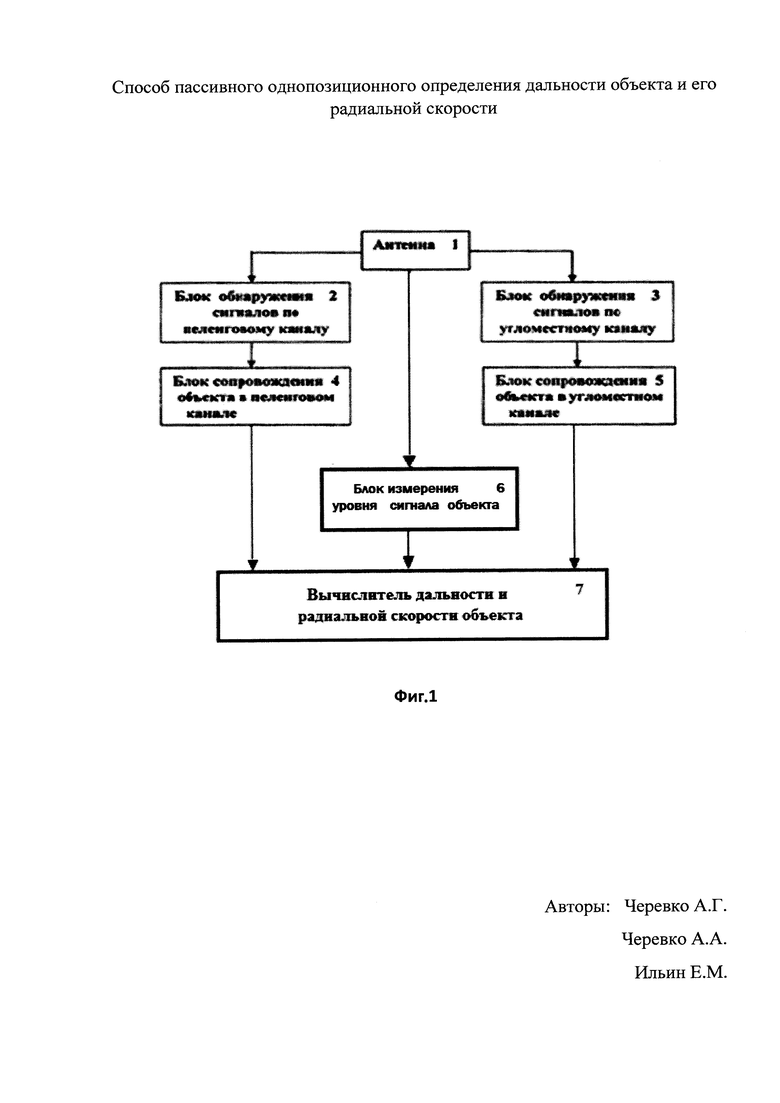
Способ-прототип иллюстрируется структурной схемой (Фиг. 1). Согласно Фиг. 1 работа прототипа заключается в следующем: электромагнитная волна от объекта принимается антенной 1, сигнал которой обрабатывается в блоке обнаружения сигналов по пеленговому каналу 2 и в блоке обнаружения сигналов по угломестному каналу 3 для последующего сопровождения объекта, соответственно в блоке сопровождения объекта в пеленговом канале 4 и в блоке сопровождения объекта в угломестном канале 5, далее сигналы от блоков 4 и 5 поступают на соответствующие два входа вычислителя дальности и радиальной скорости объекта 7. Сигнал антенны поступает также в блок измерения уровня сигнала объекта 6 и с его выхода данные об уровне сигнала поступают на третий вход вычислителя дальности и радиальной скорости объекта. Здесь пришедшие сигналы с трех входов, т.е. три параметра, совместно обрабатываются по соответствующим алгоритмам для получения, в частности, значения дальности и постоянной радиальной скорости объекта.
К недостаткам прототипа следует отнести необходимость измерения трех параметров: пеленга, угла места и уровня принимаемого сигнала для определения дальности и скорости движущегося объекта. Это снижает вероятность правильного определения дальности и скорости, поскольку повышается погрешность определения дальности и скорости особенно из-за введения измерений уровня сигнала объекта, результаты которого чувствительны к помехам, связанным с атмосферными явлениями и техногенными факторами. Такая чувствительность определяется тем, что мощность сигнала от объектов на входе антенны пассивного локатора обратно пропорциональна квадрату расстояния до источника излучения, кроме этого она также убывает под воздействием свойств среды. В идеальном случае однородных изотропных сред мощность убывает по экспоненциальному закону с постоянным коэффициентом поглощения. Для реальных сред этот коэффициент может меняться со временем и с изменением свойств среды.
Целью заявляемого способа является повышение надежности определения дальности и радиальной скорости объекта, что достигается снижением числа измеряемых параметров для расчета дальности и скорости с трех до одного, снижением зависимости результата измерения от помех, связанных с атмосферными явлениями и техногенными факторами.
Поставленная цель достигается тем, что в заявляемом способе для определения дальности и радиальной скорости движущегося объекта одиночным однопозиционным ПЭВ необходимо провести только измерения частоты смены максимумов и минимумов интенсивности результата пространственного преобразования Фурье электромагнитной волны излучаемой объектом, которая принимается преобразователем Фурье одиночного однопозиционного ПЭВ. Дальность и радиальная скорость объекта вычисляется по простым соотношениям, содержащим данные по частоте и ее производной по времени. При этом объект находится в диапазоне расстояний, соответствующих критерию действия дифракции Френеля. Оценка пеленга и угла места не входят в алгоритм обработки. Они предназначены для обнаружения излучения объекта, сопровождения объекта и ориентировки Фурье преобразователя на объект.
Таким образом, предлагаемый способ для определения дальности и скорости объекта использует один тип измерения - измерения частоты, что исключает недостатки прототипа, поскольку измерение частоты является одним из наиболее простых и точных измерений и менее чувствительно к помехам, связанным с атмосферными явлениями и техногенными факторами, чем измерение уровня сигнала.
Изобретение поясняется прилагаемыми чертежами, где на фиг. 2 приведена структурная схема предлагаемого способа, на фиг. 3-6 приведена модель экспериментальной установки для реализации способа и фрагменты показаний частотомера и вычислителя дальности и радиальной скорости объекта для разных расстояний и постоянной скорости объекта, приближающегося к апертуре.
Согласно структурной схеме (Фиг. 2) работа по предложенному способу реализуется следующим образом: электромагнитная волна (ЭМВ) от объекта, который находится в диапазоне расстояний, соответствующих критерию действия дифракции Френеля, принимается антенной 1, сигнал которой обрабатывается в блоке обнаружения сигналов по пеленговому каналу 2 и в блоке обнаружения сигналов по угломестному каналу 3 для последующего сопровождения объекта, соответственно в блоке сопровождения объекта в пеленговом канале 4 и в блоке сопровождения объекта в угломестном канале 5, далее сигналы от блоков 4 и 5 поступают на соответствующие два сигнальных входа пространственного преобразователя Фурье 6 для его ориентации на объект. ЭМВ объекта поступает в сориентированный пространственный преобразователь Фурье 6 через соответствующее окно, а с его выхода сигнал поступает на вход приемника пространственно-преобразованных электромагнитных волн 7, с выхода которого сигнал поступает на измеритель частоты сигнала 8, который измеряет частоту смены интенсивности результата пространственного преобразования Фурье с максимума на минимум, а с выхода измерителя частоты 8 сигнал поступает в вычислитель дальности и радиальной скорости объекта 9.
Как видно из описания структурной схемы (Фиг. 2), части 6-9 структурной схемы являются блоком оценки расстояния и радиальной скорости. Именно этот блок содержит новизну настоящей заявки.
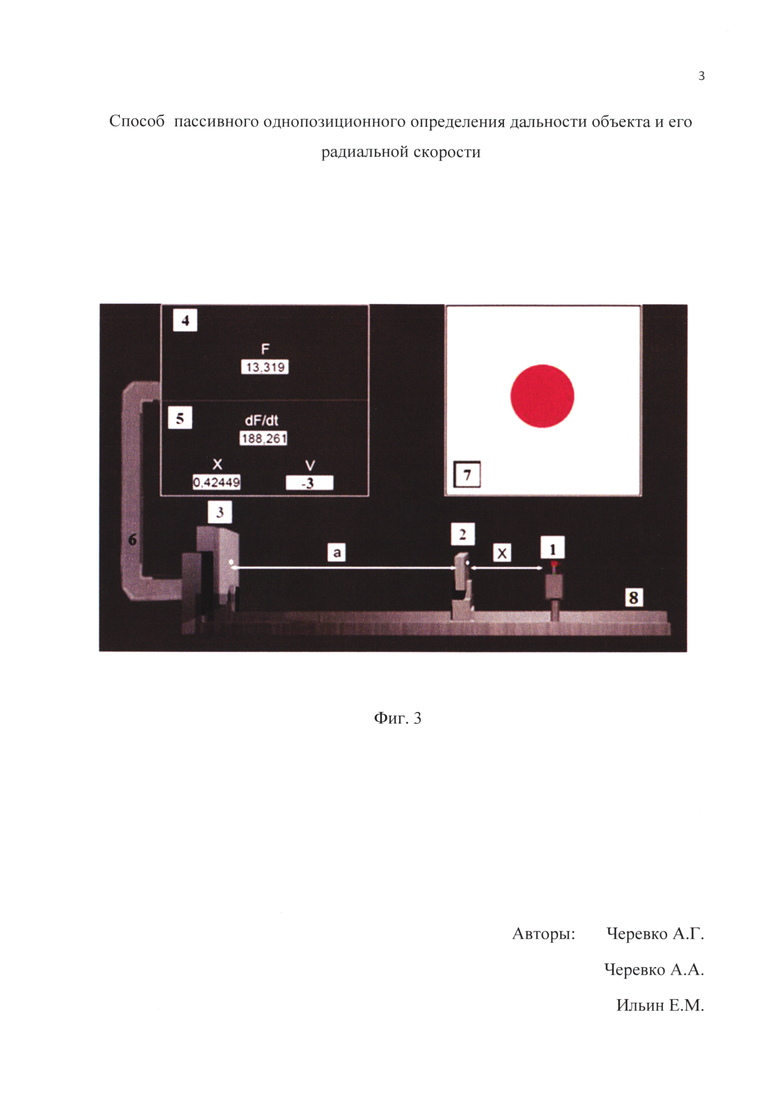
Работа модели экспериментальной установки для реализации заявленного способа понятна из Фиг. 3. В качестве объекта служит точечный источник монохроматической электромагнитной волны 1, находящийся в диапазоне расстояний, соответствующих критерию действия дифракции Френеля, в качестве пространственного преобразователя Фурье 2 служит диафрагма с круглой апертурой диметром D, поскольку интенсивность дифракционной картины, даваемой такой апертурой, представляет собой пространственное преобразование Фурье точечного источника электромагнитных волн. В качестве приемника пространственно-преобразованных электромагнитных волн 3 служит фотоприемник, помещаемый в центр картины пространственно-преобразованной электромагнитной волны, в качестве измерителя частоты сигнала 4 служит частотомер. Вычислитель дальности и радиальной скорости объекта 5, на который поступает сигнал частотомера, определяет производную частоты по времени и рассчитывает дальность и скорость объекта по нижеприведенным формулам (4) и (5), полученным авторами. Модель собрана на оптической скамье 8.
Для объекта, рассматриваемого как точечный источник монохроматической электромагнитной волны, согласно [4] число зон Френеля в круглом отверстии непрозрачного экрана диаметром D в первом приближении равно

где а - расстояние от апертуры до фотоприемника, X - расстояние от апертуры до объекта. Полагаем, что объект движется с постоянной скоростью V, скорость положительна, если направлена от апертуры к объекту, т.е. если объект удаляется от апертуры; скорость отрицательна, если направлена от объекта к апертуре, т.е. если объект приближается к апертуре. Учитывая знак скорости, получаем: X=Vt, если образец удаляется от апертуры; X=X0-Vt, если образец приближается к апертуре, здесь Х0 - расстояние до образца в начальный момент времени.
Первое слагаемое соотношения (1) и коэффициент перед вторым слагаемым определяются постоянными, но настраиваемыми параметрами установки. Если m – четное, то в центре картины пространственного преобразования Фурье (ППФ) - минимум, если нечетное, то максимум. Таким образом, число нечетных зон Френеля, соответствующих максимумам ППФ в отверстии, равно m/2. Тогда частота смены максимума на минимум равна  . Дифференцируя (1) по времени и учитывая, что радиальная скорость равна
. Дифференцируя (1) по времени и учитывая, что радиальная скорость равна  , получим:
, получим:
- для приближающегося образца (X=X0-Vt),  ,
,
- для удаляющегося образца (Х=Vt),  .
.
С учетом того, что частота (показания частотомера) величина положительная, т.е. модуль частоты, получаем:

Дифференцируя (2) с учетом того, что V=const для  , получаем:
, получаем:
- при приближении образца скорость отрицательна (X=X0-Vt),  ,
,
- при удалении образца скорость положительна (Х=Vt), .
Следовательно, по знаку производной  определяется направление движения образца, а именно, при положительной производной образец приближается - скорость отрицательна, при отрицательной производной образец удаляется - скорость положительна. Таким образом,
определяется направление движения образца, а именно, при положительной производной образец приближается - скорость отрицательна, при отрицательной производной образец удаляется - скорость положительна. Таким образом,

Решая (2) и (3) совместно, получим расчетные формулы для дальности и радиальной скорости.
Дальность объекта равна

где  - параметр установки.
- параметр установки.
Радиальная скорость объекта равна

Знак плюс у скорости соответствует удалению объекта, знак минус - его приближению. Знак перед скоростью определяет вычислитель дальности и радиальной скорости объекта по знаку производной частоты по времени (знаки скорости и производной противоположны).
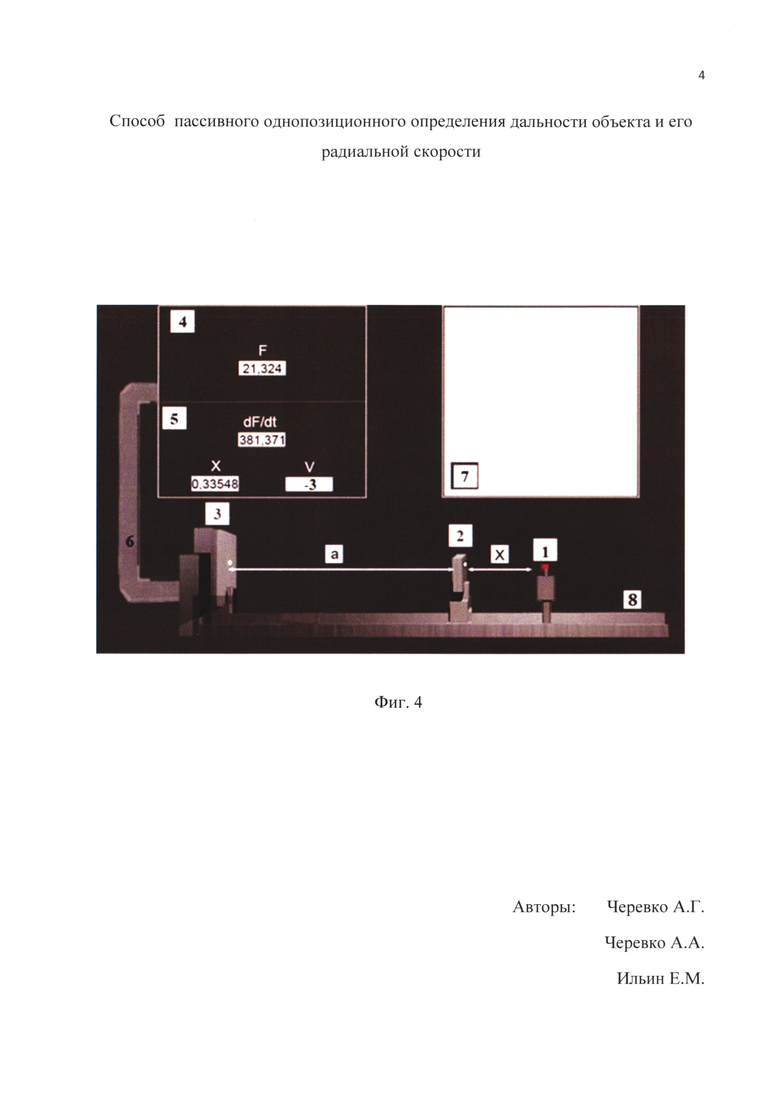
На фиг. 3-6 приведены фрагменты показаний частотомера и вычислителя дальности и радиальной скорости объекта, соответствующие различным дальностям при постоянной скорости объекта -3 м/с, знак «-» означает, что объект приближается к апертуре.
Рассмотрим модель (Фиг. 3): 1- точечный источник монохроматической электромагнитной волны с длиной волны 650 нм, 2 - пространственный преобразователь Фурье (диафрагма с круглой апертурой), 3 - приемник пространственно-преобразованных электромагнитных волн (фотоприемник), 4 - частотомер, 5 - вычислитель дальности и радиальной скорости объекта, 6 - сигнальный кабель, 7 - увеличенное изображение центрального пятна, 8 - оптическая скамья.
На Фиг. 3 представлен первый фрагмент, характеризующий процесс измерения дальности и скорости. Он соответствует максимуму интенсивности центра картины пространственного преобразования Фурье (на увеличенном изображении этого центра видно красное пятно). Как видно из показаний вычислителя дальности и радиальной скорости объекта 5: дальность объекта равна 0,42449 м, скорость объекта равна - 3 м/с, т.е. объект приближается к апертуре, что подтверждается положительным знаком производной частоты по времени.
На Фиг. 4 представлена модель экспериментальной установки с фрагментом 2, где наблюдается минимум (изображение пятна отсутствует); на Фиг. 5 - модель экспериментальной установки с фрагментом 3, где наблюдается максимум; на Фиг. 6 - модель экспериментальной установки с фрагментом 4, где наблюдается минимум.
Разработанный способ позволяет повысить надежность определения дальности и радиальной скорости объекта, так как уменьшает количество параметров, которые необходимо измерить для определения дальности и радиальной скорости с трех до одного. При этом в предлагаемом способе используется один тип измерения - измерение частоты, которое является одним из наиболее простых и точных измерений и менее чувствительно к помехам, связанным с атмосферными явлениями и техногенными факторами, чем измерение уровня сигнала, применяемое в прототипе. Эти преимущества в совокупности приводят к повышению надежности определения дальности и радиальной скорости объекта и соответствующему экономическому и социальному эффекту.
Литература
1. Быстров Р.П., Загорин Г.К., Федорова Л.В. Пассивная радиолокация: методы обнаружения объектов. Монография / Под ред. Р.П. Быстрова и А.В. Соколова. - М.: Радиотехника, 2008. - 320 с.: ил.
2. Охрименко А.Е. Основы радиолокации и радиоэлектронная борьба. Ч.1. Основы радиолокации. М.: Воениздат. 1983. 456 с.
3. Рудинский А.В., Шенгелия М.В. О возможности определения дистанции до объекта в пассивном режиме работы радиотелескопа // Фундаментальные исследования. 2013, №11, с. 648-650.
4. Савельев И.В. Курс общей физики. Т2. М.: Наука. 1978. 480 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОПОЗИЦИОННЫЙ ПАССИВНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС ДЛЯ ОПРЕДЕЛЕНИЯ ГОРИЗОНТАЛЬНЫХ КООРДИНАТ, ЭЛЕМЕНТОВ ДВИЖЕНИЯ ЦЕЛИ И КОЭФФИЦИЕНТА КИЛОМЕТРИЧЕСКОГО ЗАТУХАНИЯ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ЦЕЛИ | 2014 |
|
RU2586078C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| СПОСОБ РАДИОКОНТРОЛЯ | 2004 |
|
RU2287169C2 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ ОБРАБОТКИ СИГНАЛА И СПОСОБ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 1997 |
|
RU2121156C1 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ РАДИОИЗЛУЧАЮЩИХ ОБЪЕКТОВ | 2019 |
|
RU2716145C1 |
| Способ определения параметров движения и траекторий воздушных объектов при полуактивной бистатической радиолокации | 2018 |
|
RU2687240C1 |
| ОДНОЭТАПНЫЙ МЕТОД ПЕЛЕНГОВАНИЯ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ В ДКМВ ДИАПАЗОНЕ С ПРИМЕНЕНИЕМ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ, СОСТОЯЩЕЙ ИЗ ВЗАИМНО ОРТОГОНАЛЬНЫХ СИММЕТРИЧНЫХ ГОРИЗОНТАЛЬНЫХ ВИБРАТОРОВ | 2016 |
|
RU2614035C1 |
| Способ измерения углового положения наземных неподвижных радиоконтрастных объектов | 2017 |
|
RU2672092C1 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ РАДИОПЕРЕДАТЧИКОВ | 2019 |
|
RU2716004C1 |



Изобретение относится к области радиолокации и радионавигации в части их использования для определения дальности и радиальной скорости объекта, излучающего электромагнитные волны. Достигаемый технический результат - повышение надежности определения дальности и радиальной скорости объекта путем снижения числа измеряемых параметров и снижением зависимости результата измерения от помех, связанных с атмосферными явлениями и техногенными факторами. Указанный результат достигается тем, что для определения дальности и радиальной скорости движущегося объекта необходимо провести только измерения частоты смены максимумов и минимумов интенсивности результата пространственного преобразования Фурье электромагнитной волны излучаемой объектом, которая принимается преобразователем Фурье. Дальность и радиальная скорость объекта вычисляется по соотношениям, содержащим данные по частоте и ее производной по времени. При этом объект находится в диапазоне расстояний, соответствующих критерию действия дифракции Френеля. 6 ил.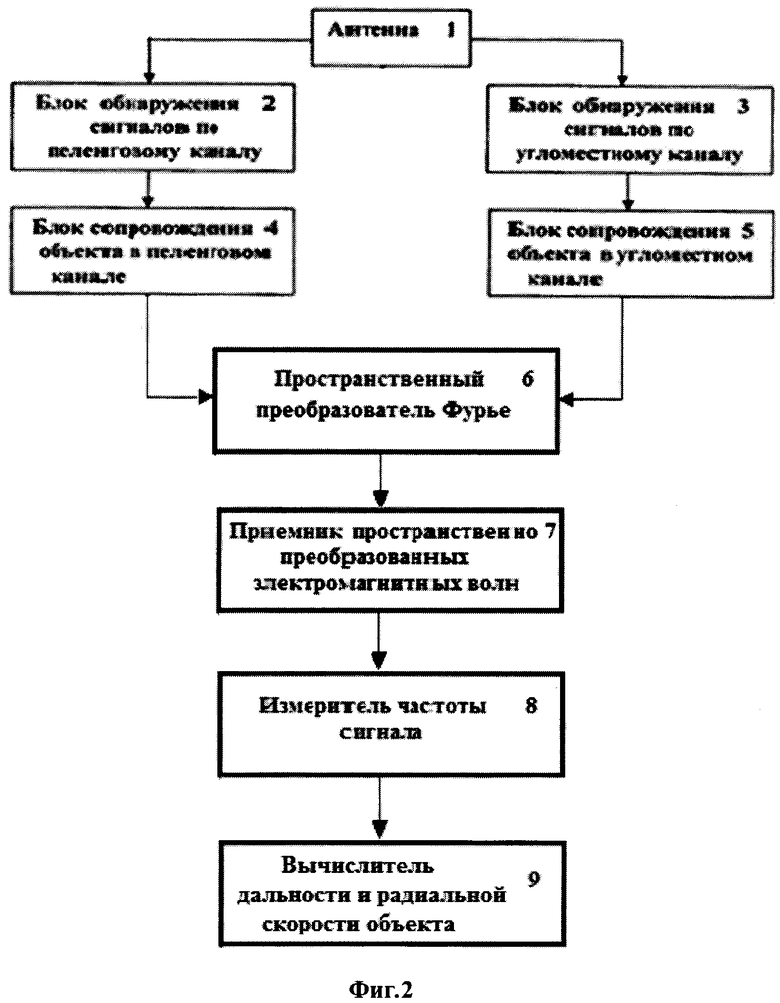
Способ пассивного однопозиционного определения дальности объекта и его радиальной скорости, осуществляющий оценку пеленга и угла места объекта в процессе сопровождения объекта, а также оценку дальности и радиальной скорости объекта, отличающийся тем, что дальность и радиальная скорость объекта определяются путем измерения частоты смены максимумов и минимумов интенсивности результата пространственного преобразования Фурье электромагнитной волны, излучаемой объектом, находящимся в диапазоне расстояний, соответствующих критерию действия дифракции Френеля, при этом оценку пеленга и угла места объекта используют для ориентации пространственного преобразователя Фурье на объект.
| РУДИНСКИЙ А.В., ШЕНГЕЛИЯ М.В | |||
| О возможности определения дистанции до объекта в пассивном режиме работы радиотелескопа | |||
| Фундаментальные исследования | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСТОЯННОЙ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ ПО ДАЛЬНОСТИ В ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С КВАЗИСЛУЧАЙНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2491572C1 |
| СПОСОБ ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2416807C2 |
| Способ получения катализатора для синтеза аммиака | 1960 |
|
SU134670A1 |
| US 20120206289 A1, 16.08.2012 | |||
| JP 5601881 B2, 08.10.2014 | |||
| Устройство для измерения частоты пульса | 1990 |
|
SU1806596A1 |

