ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к измерительной технике и может быть использовано для поиска места прохождения и глубины залегания кабельных линий, трубопроводов, водоснабжения и теплосети, газо- и нефтепроводов, находящихся под землей.
УРОВЕНЬ ТЕХНИКИ
Известен способ определения места прохождения подземных коммуникаций, заключающийся в генерировании переменного испытательного сигнала, подачи его в искомую коммуникацию, измерение напряженности магнитного поля, излучаемого искомой коммуникацией за счет протекающего по ней генерируемого испытательного сигнала, с помощью одноэлементного линейного датчика магнитного поля в электрический сигнал. При этом датчик с помощью оператора перемещается поперек трассы и вначале угол наклона преобразователя равен нулю. По индикатору измерительного устройства определяют максимальное значение сигнала. Фиксируют место максимального значения, которое соответствует месту прохождения коммуникации. Затем датчик поворачивают под углом 45° к поверхности земли. С помощью оператора выполняют сканирование в направлении поперек трассы и фиксируют место нахождения первого минимума сигнала от места прохождения трассы. Измеряют расстояние от определенного места максимума сигнала до определенного места минимума сигнала, которое и будет соответствовать глубине залегания коммуникации (Шалыт Г.М. Определение места повреждения в электрических сетях. М., 1982).
Данный метод достаточно прост, но имеет ряд ограничений: невозможно использовать данный метод при нахождении коммуникации под препятствием (стена, конструкция, стройматериалы, кусты, деревья и др.), также невозможность его применения в случае, если на поверхности на расстоянии, равном глубине залегания коммуникации, находятся строительные или иные конструкции. Кроме этого данный метод неприменим при искажении магнитного поля за счет проходящих рядом других коммуникаций. Метод имеет большую погрешность определения глубины залегания коммуникации.
Известен способ определения места прохождения подземных коммуникаций, заключающийся в генерировании переменного испытательного сигнала, подачи его в искомую коммуникацию, измерении напряженности магнитного поля, излучаемого искомой коммуникацией за счет протекающего по ней генерируемого испытательного сигнала, с помощью двух датчиков магнитного поля в электрический сигнал, разнесенных по высоте на заданное расстояние. При этом датчики с помощью оператора перемещаются поперек трассы. По индикатору измерительного устройства определяют максимальное значение сигнала. Фиксируют место максимального значения, которое соответствует месту прохождения коммуникации. Глубину залегания коммуникации определяют расчетным путем, по значениям, полученным с каждого из двух преобразователей и величине расстояния между ними (Грохман Ж., Джеймс С., Новлес Д. От А до Я локации и поиска повреждений подземных кабелей и труб. М., 1999. С. 167).
Недостатками данного метода являются увеличение габаритов устройства и невозможность использовать данный метод при нахождении коммуникации под препятствием (стена, конструкция, стройматериалы и др.).
Известен способ определения глубины залегания элементов заземляющего устройства, включающий подключение источника переменного тока к заземляющему устройству, определение трассы прокладки заземляющего устройства путем нахождения максимального сигнала и фиксации по нему места прохождения трассы, измерение напряженности электромагнитного поля на поверхности земли над элементом заземляющего устройства, перемещение датчика в точку пространства на известное расстояние от места прохождения трассы в плоскости параллельно уровню земли и на известную высоту строго вертикально, измеряют напряженность электромагнитного поля, глубину залегания определяют по заданной формуле (RU 2315337, опубл. 20.01.2008).
Данный способ не может быть использован при нахождении препятствия над коммуникацией. Кроме этого неточность расчета обусловлена возможными искажениями электромагнитного поля от металлических предметов, способ неприменим при прохождении нескольких коммуникаций.
Наиболее близким аналогом заявленной группы изобретения является способ определения расстояния до места прохождения кабеля и глубины его залегания, включающий: подключение источника переменного тока к кабелю; определение примерной трассы прокладки кабеля, измерение напряженности электромагнитного поля на поверхности земли на неизвестном расстоянии от кабеля; перемещение датчика строго вертикально на известную высоту над поверхностью земли и измерение напряженности электромагнитного поля в данной точке; перемещение датчика строго вертикально на другую известную высоту над поверхностью земли и измерение напряженности электромагнитного поля в этой точке, расстояние до места прохождения кабеля и глубину его залегания рассчитывают по заданным формулам. Устройство содержит датчик напряженности магнитного поля, блок вычисления модуля, измерительный прибор и генератор, подключаемый к кабелю (RU 2352963, опубл. 20.04.2009).
Данный способ не может быть использован при нахождении препятствия (нависающих конструкций) над коммуникацией. Наличие кустов, деревьев, строительных конструкций, мебели над и вблизи коммуникаций препятствует возможности определить место прохождения и глубину залегания коммуникаций данным методом. Кроме этого неточность расчета обусловлена возможными искажениями электромагнитного поля от металлических предметов, способ неприменим при прохождении нескольких коммуникаций, большая погрешность вызвана невертикальностью перемещения датчика.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей заявленной группы изобретений является разработка способа и устройства, обеспечивающих возможность определения расстояния до места прохождения коммуникации и глубины ее залегания при наличии как препятствий над коммуникацией, так и при наличии нависающих конструкций, возможность определения расстояния до места прохождения и глубины залегания нескольких коммуникаций.
Техническим результатом группы изобретения является повышение точности и снижение трудоемкости измерений.
Указанный технический результат достигается за счет того, что способ определения глубины залегания и расстояния до места прохождения, по крайней мере, одной коммуникации характеризуется тем, что подключают источник переменного тока, по крайней мере, к одной коммуникации, генерируют переменный испытательный сигнал и подают его, по крайней мере, в одну коммуникацию, определяют примерную трассу прокладки, по крайней мере, одной коммуникации и место положения первой точки измерения, после чего:
a) устанавливают блок датчиков, содержащий, по крайней мере, один датчик электромагнитного поля в первую точку измерения, при помощи которого измеряют величину напряженности электромагнитного поля в первой точке на каждом датчике в блоке, после чего при помощи коммутатора фиксируют величину напряженности электромагнитного поля и высоту над уровнем земли в первой точке измерения на каждом датчике в блоке;
b) перемещают блок датчиков в произвольную точку измерения на известные расстояния, по крайней мере, по одной координате, измеряют в данной точке величину напряженности электромагнитного поля на каждом датчике и при помощи коммутатора в данной точке фиксируют величину напряженности электромагнитного поля на каждом датчике и изменение координат, на которое перемещают блок датчиков электромагнитного поля от первой точки измерения;
c) повторяют операцию b) необходимое количество раз в зависимости от заданной точности измерения, характеризующейся количеством коммуникаций и датчиков электромагнитного поля в блоке;
d) определяют глубину залегания и расстояние, по крайней мере, до одной коммуникации на основе решения нелинейных уравнений в соответствии с выражениями для напряженности электромагнитного поля.
Глубину залегания и расстояние, по крайней мере, до одной коммуникации определяют на основе решения системы нелинейных уравнений в соответствии с выражениями для напряженности электромагнитного поля при помощи блока обработки устройства определения глубины залегания и расстояния до места прохождения подземной коммуникации, при этом глубину залегания коммуникации относительно уровня грунта определяют как разницу глубины залегания коммуникации относительно первого датчика в первой точке измерения и высоты над уровнем грунта первого датчика в первой точке измерения.
Операции а) - с) повторяют не менее трех раз и определяют глубину залегания и расстояния до места прохождения, по крайней мере, до одной подземной коммуникации как среднее из полученных значений.
При проведении измерений напряженности электромагнитного поля при наличии, по крайней мере, одной коммуникации и при помощи блока датчиков, содержащего, по крайней мере, один одноэлементный датчик электромагнитного поля, содержащий один чувствительный элемент, ось измерения которого размещена вдоль оси X, причем при наличии более одного одноэлементного датчика электромагнитного поля датчики в блоке разнесены на заранее фиксированные заданные расстояния друг от друга, при их параллельном расположении и переносе в новую точку измерения в блоке друг относительно друга, при этом измерение напряженности электромагнитного поля осуществляют в плоскости, перпендикулярной или неперпендикулярной продольной оси коммуникаций, при постоянном или изменяющимся угле осей измерения датчиков напряженности электромагнитного поля и фиксации расстояний, на которые смещены датчики и углы, на которые повернуты оси датчиков от положения в первой точке измерения, причем при наличии более одной коммуникации, измерения напряженности электромагнитного поля осуществляют при их произвольном или параллельном расположении, при этом напряженность электромагнитного поля определяется как модуль векторной суммы напряженности электромагнитного поля от каждой m-коммуникации в точке d-датчика и в n-точке измерений из выражений:


где E(l)nd - суммарная напряженность электромагнитного поля, измеренная одноэлементным d-датчиком электромагнитного поля в n-точке измерения; E(l)ndm,  - модуль и проекция вектора соответственно напряженности электромагнитного поля, в месте расположения одноэлементного d-датчика электромагнитного поля в n-точке измерения, создаваемая m-коммуникацией вдоль оси датчика; Кd - коэффициент преобразования прибора канала d-датчика; Im - ток в m-коммуникации; а0m - искомое расстояние до места прохождения m-коммуникации от первого датчика электромагнитного поля в первой точке измерения в плоскости, параллельной плоскости XZ, параллельной линии коммуникации; у0m - расстояние от первого датчика электромагнитного поля в первой точке измерения до места прохождения m-коммуникации по оси Y, ортогональной плоскости XZ; bnd - известное расстояние, на которое d-датчик электромагнитного поля смещен в n-точку измерения от первой точки измерения по оси Y; сn - известное расстояние, на которое первый датчик электромагнитного поля смещен ортогонально продольной оси датчика в n-точку от первой точки измерений по оси Z, ортогональной оси X; аn - известное расстояние, на которое смещен первый датчик электромагнитного поля в n-точке измерения от первой точки измерения по оси X, совпадающей с линией продольной оси датчика; zd, xd - известное расстояние, на котором расположен d-датчик электромагнитного поля от первого датчика в блоке датчиков по оси Z и по оси X соответственно; α0m - угол расположения продольной оси датчика электромагнитного поля к нормали к продольной оси m-коммуникации в первой точке измерений в плоскости, параллельной плоскости XZ; αn - угол поворота оси измерения датчика электромагнитного поля относительно продольной оси датчика в плоскости, параллельной плоскости XZ, в n-точке измерения относительно положения в первой точке измерений, причем на основе выражений для напряженности электромагнитного поля в точке d-датчика и в n-точке измерений определяют расстояние до места прохождения m-коммуникации в плоскости, параллельной плоскости XZ, и глубину залегания на основе решения системы нелинейных уравнений с неизвестными - а0m, у0m, Im, α0m, в которой количество измерений равно или больше количества неизвестных, а количество данных, полученных с датчиков, больше или равно количеству неизвестных.
- модуль и проекция вектора соответственно напряженности электромагнитного поля, в месте расположения одноэлементного d-датчика электромагнитного поля в n-точке измерения, создаваемая m-коммуникацией вдоль оси датчика; Кd - коэффициент преобразования прибора канала d-датчика; Im - ток в m-коммуникации; а0m - искомое расстояние до места прохождения m-коммуникации от первого датчика электромагнитного поля в первой точке измерения в плоскости, параллельной плоскости XZ, параллельной линии коммуникации; у0m - расстояние от первого датчика электромагнитного поля в первой точке измерения до места прохождения m-коммуникации по оси Y, ортогональной плоскости XZ; bnd - известное расстояние, на которое d-датчик электромагнитного поля смещен в n-точку измерения от первой точки измерения по оси Y; сn - известное расстояние, на которое первый датчик электромагнитного поля смещен ортогонально продольной оси датчика в n-точку от первой точки измерений по оси Z, ортогональной оси X; аn - известное расстояние, на которое смещен первый датчик электромагнитного поля в n-точке измерения от первой точки измерения по оси X, совпадающей с линией продольной оси датчика; zd, xd - известное расстояние, на котором расположен d-датчик электромагнитного поля от первого датчика в блоке датчиков по оси Z и по оси X соответственно; α0m - угол расположения продольной оси датчика электромагнитного поля к нормали к продольной оси m-коммуникации в первой точке измерений в плоскости, параллельной плоскости XZ; αn - угол поворота оси измерения датчика электромагнитного поля относительно продольной оси датчика в плоскости, параллельной плоскости XZ, в n-точке измерения относительно положения в первой точке измерений, причем на основе выражений для напряженности электромагнитного поля в точке d-датчика и в n-точке измерений определяют расстояние до места прохождения m-коммуникации в плоскости, параллельной плоскости XZ, и глубину залегания на основе решения системы нелинейных уравнений с неизвестными - а0m, у0m, Im, α0m, в которой количество измерений равно или больше количества неизвестных, а количество данных, полученных с датчиков, больше или равно количеству неизвестных.
При проведении измерений напряженности электромагнитного поля при наличии, по крайней мере, одной коммуникации и при помощи блока датчиков, содержащего, по крайней мере, один двухэлементный датчик электромагнитного поля, содержащий два чувствительных элемента, оси измерения которых ортогонально размещены относительно друг друга в плоскости XY и прохождении оси X параллельно поверхности грунта, причем при наличии более одного двухэлементного датчика электромагнитного поля, датчики в блоке разнесены на заранее фиксированные заданные расстояния друг от друга, при их переносе в новую точку измерения и фиксации расстояний, на которые смещены датчики от положения в первой точке измерения, при этом измерение напряженности электромагнитного поля осуществляют в плоскости, перпендикулярной продольной оси коммуникации, при фиксации расстояний, на которые смещены датчики от положения в первой точке измерения, при этом напряженность электромагнитного поля определяется, как сумма напряженности электромагнитного поля от каждой m-коммуникации, расположенных параллельно, в точке d-датчика и в n-точке измерений из выражений:



где E(2)nd - суммарная напряженность электромагнитного поля, измеренная двухэлементным d-датчиком электромагнитного поля в n-точке измерения; E(2)1nd, E(2)2nd - напряженности электромагнитного поля, измеренные первым и вторым чувствительными элементами двухэлементного d-датчика электромагнитного поля соответственно в n-точке измерения; E(2)Xndm, E(2)Yndm - напряженность электромагнитного поля в месте расположения двухэлементного d-датчика электромагнитного поля в n-точке измерения, создаваемая m-коммуникацией вдоль оси X и оси Y соответственно; KXd, KYd - коэффициент преобразования прибора каналов X и Y d-датчика соответственно; Im - ток в m-коммуникации; а0m - искомое расстояние до места прохождения m-коммуникации от первого датчика электромагнитного поля в первой точке измерения в плоскости, параллельной плоскости XZ, параллельной линии коммуникации; у0m - расстояние от первого датчика электромагнитного поля в первой точке измерения до места прохождения m-коммуникации по оси Y, ортогональной плоскости XZ; bnd известное расстояние, на которое d-датчик электромагнитного поля смещен в n-точку измерения от первой точки измерения по оси Y; fnd - известное расстояние, на которое смещен d-датчик электромагнитного поля в n-точке измерения от первого датчика в первой точке в плоскости, параллельной плоскости XY, при этом на основе выражений для напряженности электромагнитного поля в точке d-датчика и в n-точке измерений определяют расстояние до места прохождения m-коммуникаций в плоскости, параллельной плоскости XZ, и глубину залегания на основе решения системы нелинейных уравнений с неизвестными - а0m, у0m, Im, в которой количество измерений равно или больше количества неизвестных, а количество данных, полученных с датчиков, больше или равно количеству неизвестных.
При проведении измерений напряженности электромагнитного поля при наличии, по крайней мере, одной коммуникации и при помощи блока датчиков, содержащего, по крайней мере, один двухэлементный датчик электромагнитного поля, содержащий два чувствительных элемента, оси измерения которых ортогонально размещены относительно друг друга в плоскости XZ и произвольно расположены в плоскости XZ, причем при наличии более одного двухэлементного датчика электромагнитного поля, датчики в блоке разнесены на заранее фиксированные заданные расстояния друг от друга, при их переносе в новую точку измерения и фиксации расстояний, на которые смещены датчики от положения в первой точке измерения, при этом измерение напряженности электромагнитного поля осуществляют в плоскости параллельной продольной оси коммуникации, при фиксации расстояний, на которые смещены датчики от положения в первой точке измерения, при этом напряженность электромагнитного поля определяется в точке d-датчика и в n-точке измерений из выражений:

где E(2)nd - суммарная напряженность электромагнитного поля, измеренная двухэлементным d-датчиком электромагнитного поля в n-точке измерения; E(2)1nd, E(2)2nd - напряженности электромагнитного поля, измеренные первым и вторым чувствительными элементами двухэлементного d-датчика электромагнитного поля в n-точке измерения соответственно; E(2)XZndm - напряженность электромагнитного поля в месте расположения двухэлементного d-датчика электромагнитного поля в n-точке измерения, создаваемая m-коммуникацией в плоскости, параллельной плоскости XZ; KXZd - коэффициент преобразования прибора канала XZ d-датчика; Im - ток в m-коммуникации; а0m - искомое расстояние до места прохождения m-коммуникации от первого датчика электромагнитного поля в первой точке измерения в плоскости, параллельной плоскости XZ, параллельной линии коммуникации; y0m - расстояние от первого датчика электромагнитного поля в первой точке измерения до места прохождения m-коммуникации по оси Y, ортогональной плоскости XZ; bnd - известное расстояние, на которое d-датчик электромагнитного поля смещен в n-точку измерения от первой точки измерения по оси Y; fnd - известное расстояние, на которое смещен d-датчик электромагнитного поля в n-точке измерения от первого датчика в первой точке в плоскости, параллельной плоскости XY, при этом на основе выражений для напряженности электромагнитного поля в точке d -датчика и в n-точке измерений определяют расстояние до места прохождения m-коммуникаций в плоскости, параллельной плоскости XZ, и глубину залегания на основе решения системы нелинейных уравнений с неизвестными - а0m, у0m, Im, в которой количество измерений равно или больше количества неизвестных, а количество данных, полученных с датчиков, больше или равно количеству неизвестных.
При проведении измерений напряженности электромагнитного поля при наличии, по крайней мере, одной коммуникации и при помощи блока датчиков, содержащего, по крайней мере, один трехэлементный датчик электромагнитного поля, содержащий три чувствительных элемента, оси измерения которых ортогонально размещены относительно друг друга и произвольно расположены, причем при наличии более одного трехэлементного датчика электромагнитного поля, датчики в блоке разнесены на заранее фиксированные заданные расстояния друг от друга, при фиксации расстояний, на которые смещены датчики от положения в первой точке измерения, при этом напряженность электромагнитного поля над m-коммуникациями, расположенными параллельно, определяется как векторная сумма напряженности от каждой коммуникации в точке d-датчика и в n-точке измерения из выражений:




где E(3)nd - суммарная напряженность электромагнитного поля, измеренная трехэлементным d-датчиком электромагнитного поля в n-точке измерения; E(3)1nd, E(3)2nd, E(3)3nd - напряженности электромагнитного поля, измеренные первым, вторым и третьим чувствительными элементами трехэлементного d-датчика в n-точке измерения соответственно; E(3)XZndm, E(3)Yndm - напряженность электромагнитного поля в месте расположения трехэлементного d-датчика электромагнитного поля в n-точке измерения, создаваемая m-коммуникацией в плоскости, параллельной плоскости XZ, и вдоль оси Y соответственно; KXZd, KYd - коэффициент преобразования прибора каналов XZ и Y отдатчика соответственно; Im - ток в m-коммуникации; а0m - искомое расстояние до места прохождения m-коммуникации от первого датчика электромагнитного поля в первой точке измерения в плоскости, параллельной плоскости XZ, параллельной линии коммуникации; у0m - расстояние от первого датчика электромагнитного поля в первой точке измерения до места прохождения m-коммуникации по оси Y, ортогональной плоскости XZ; bnd - известное расстояние, на которое d-датчик электромагнитного поля смещен в n-точку измерения от первой точки измерения по оси Y; fnd - известное расстояние, на которое смещен d-датчик электромагнитного поля в n-точке измерения от первого датчика в первой точке в плоскости, параллельной плоскости XY, при этом на основе выражений для напряженности электромагнитного поля в точке d-датчика и в n-точке измерений определяют расстояние до места прохождения m-коммуникаций в плоскости, параллельной плоскости XZ, и глубину залегания на основе решения системы нелинейных уравнений с неизвестными - а0m, у0m, Im, в которой количество измерений равно или больше количества неизвестных, а количество данных, полученных с датчиков, больше или равно количеству неизвестных.
Глубину залегания и расстояние, по крайней мере, до одной коммуникации определяют на основе решения нелинейных уравнений методами наименьших квадратов и регрессионными методами в соответствии с выражениями для напряженности электромагнитного поля при помощи блока обработки устройства определения глубины залегания и расстояния до места прохождения подземной коммуникации, при этом глубину залегания коммуникации относительно уровня грунта определяют как разницу глубины залегания коммуникации относительно первого датчика в первой точке измерения и высоты над уровнем грунта первого датчика в первой точке измерения.
На основе изменения величины и знака измеренных значений электромагнитного поля определяют направление расположения коммуникации.
Устройство для определения места прохождения и глубины залегания подземных коммуникаций для выполнения вышеописанного способа содержит источник переменного тока, подключаемый, по крайней мере, к одной коммуникации, блок датчиков, содержащий, по крайней мере, один датчик электромагнитного поля, и корпус, в котором расположены, по крайней мере, один предусилитель для каждого датчика электромагнитного поля, по крайней мере, один аналого-цифровой преобразователь (АЦП), соединенный с соответствующим предусилителем, индикатор, блок обработки, блок питания, коммутатор реперных точек, блок памяти расстояния между реперными точками и блок памяти величины электромагнитного поля в реперных точках, при этом блок датчиков соединен с предусилителем, блок питания выполнен с возможностью подачи питания блоку датчиков, предусилителю, блоку обработки и индикатору, а блок обработки соединен с предусилителем через АЦП, индикатором, коммутатором реперных точек, блоком памяти расстояния между реперными точками и блоком памяти величины электромагнитного поля в реперных точках.
В качестве датчиков электромагнитного поля применены одноэлементный, двухэлементный или трехэлементный датчики электромагнитного поля, измеряющие напряженность электромагнитного поля вдоль одной оси, в плоскости или в точке пространства соответственно, и содержащие чувствительные элементы.
Блок датчиков расположен вне или в корпусе.
При наличии в блоке датчиков более одного датчика электромагнитного поля, датчики в блоке разнесены на заранее фиксированные заданные расстояния друг от друга.
В качестве коммутатора применен переключатель на панели прибора, при этом в память прибора введены фиксированные значения расстояний, соответствующие последовательности нажатия переключателя.
Переключатель выполнен с возможностью запуска начала измерения в первой точке, фиксации последующих точек измерения, остановки измерения и синхронизации измерений по времени при помощи таймера, а промежуточные расстояния между точками измерения вычисляются по предварительно занесенному в память алгоритму.
Устройство дополнительно содержит измеритель расстояния, соединенный с блоком обработки.
В качестве измерителя расстояния применена мерная планка, связанная с корпусом устройства и содержащая метки фиксируемых расстояний, занесенных в память прибора.
В качестве измерителя расстояния применено мерное колесо.
В качестве измерителя расстояния применен акселерометр при фиксации промежуточных точек по предварительно занесенному в память алгоритму.
В качестве измерителя расстояния применена комбинация приборов, выполненных с возможностью дополнительного измерения углов поворота оси измерения датчиков электромагнитного поля и включающих в себя акселерометр, альтиметр, магнетометр, электронный гироскоп, соединенные с блоком обработки, при фиксации промежуточных точек по предварительно занесенному в память алгоритму.
В качестве измерителя расстояния применена GPS система, при фиксации промежуточных точек по предварительно занесенному в память алгоритму.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение будет более понятным из описания, не имеющего ограничительного характера и приводимого со ссылками на прилагаемые чертежи, на которых изображено:
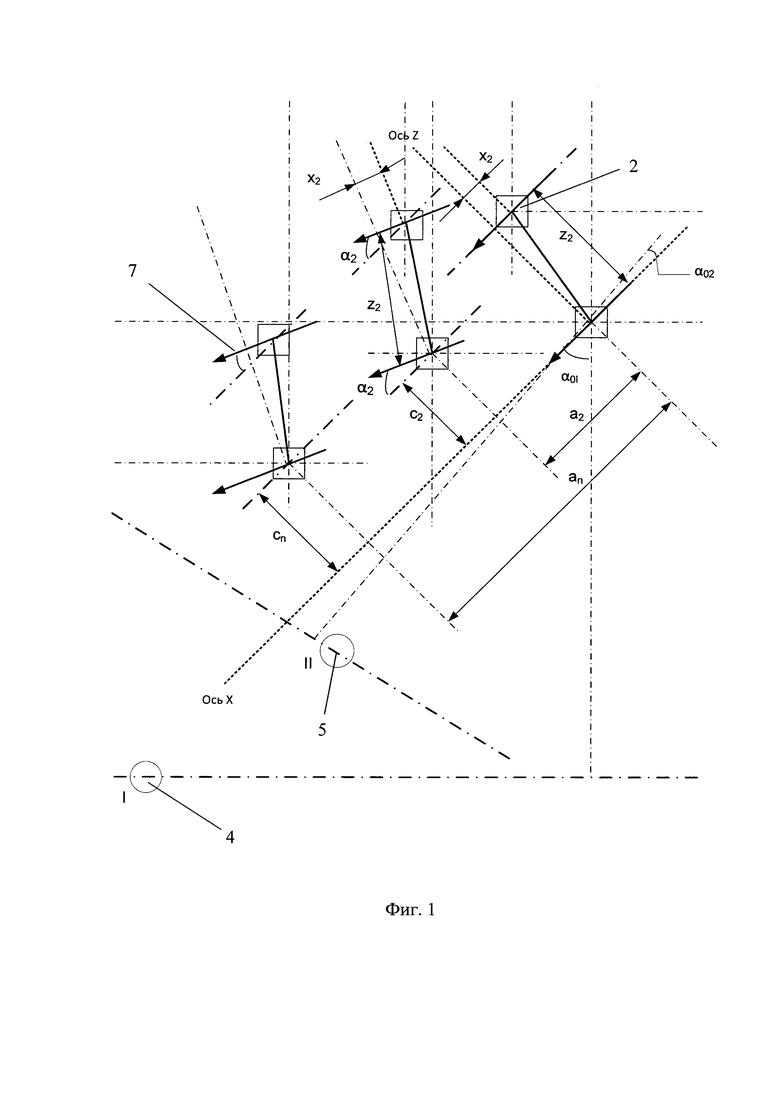
Фиг. 1 - Расположение двух одноэлементных датчиков электромагнитного поля, измеряющих напряженность электромагнитного поля вдоль оси X, при наличии двух произвольно расположенных коммуникаций (вид сверху).
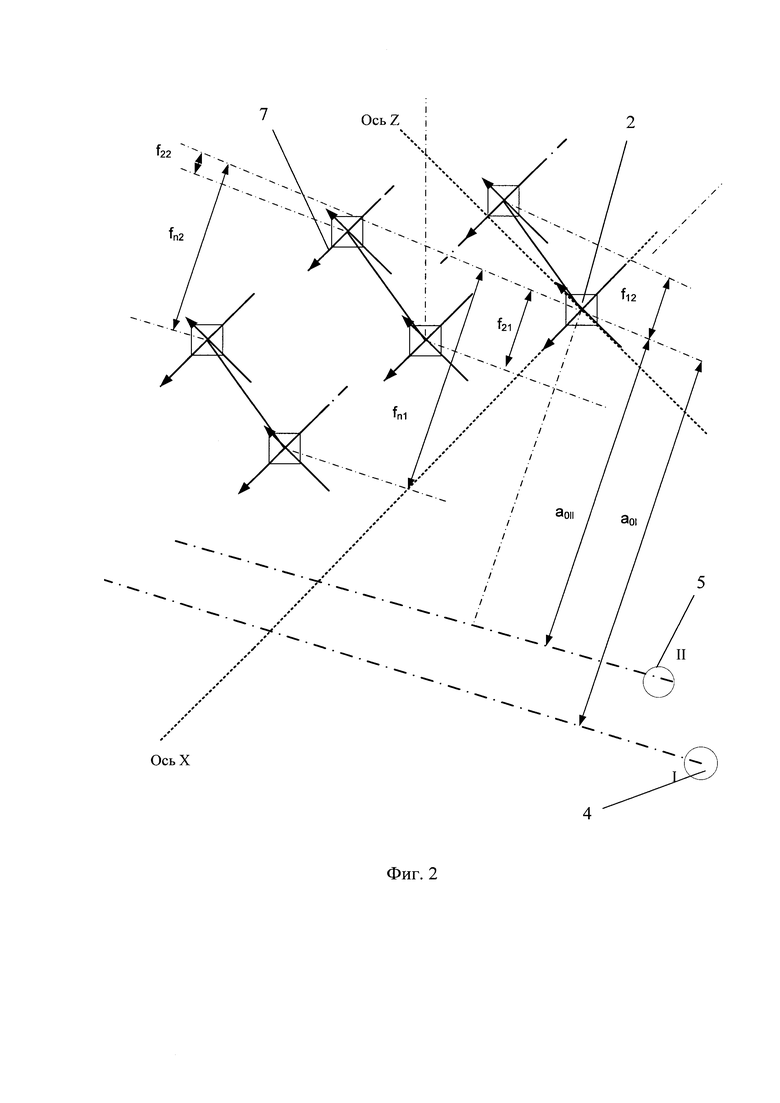
Фиг. 2 - Расположение двух двухэлементных датчиков электромагнитного поля, измеряющих напряженность электромагнитного поля в плоскости, параллельной плоскости XZ, при наличии двух параллельных коммуникаций (вид сверху).
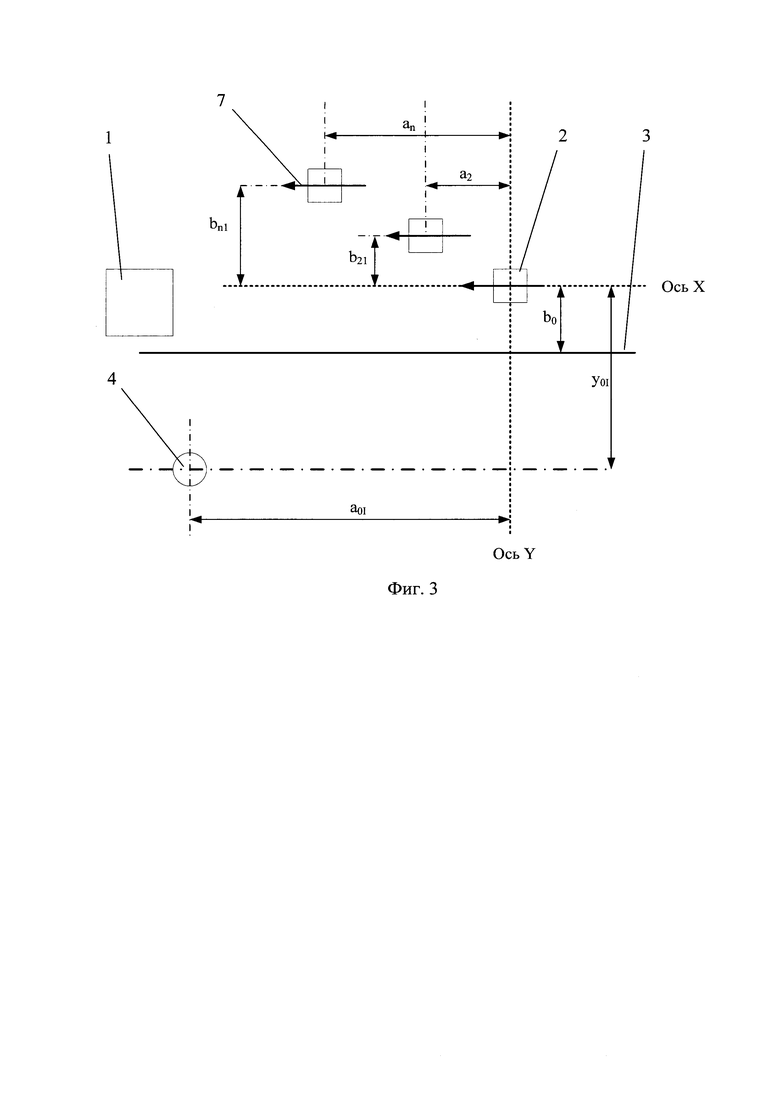
Фиг. 3 - Расположение одноэлементного датчика электромагнитного поля, измеряющего напряженность электромагнитного поля вдоль оси X, при наличии одной коммуникации (разрез в плоскости перпендикулярной поверхности грунта).
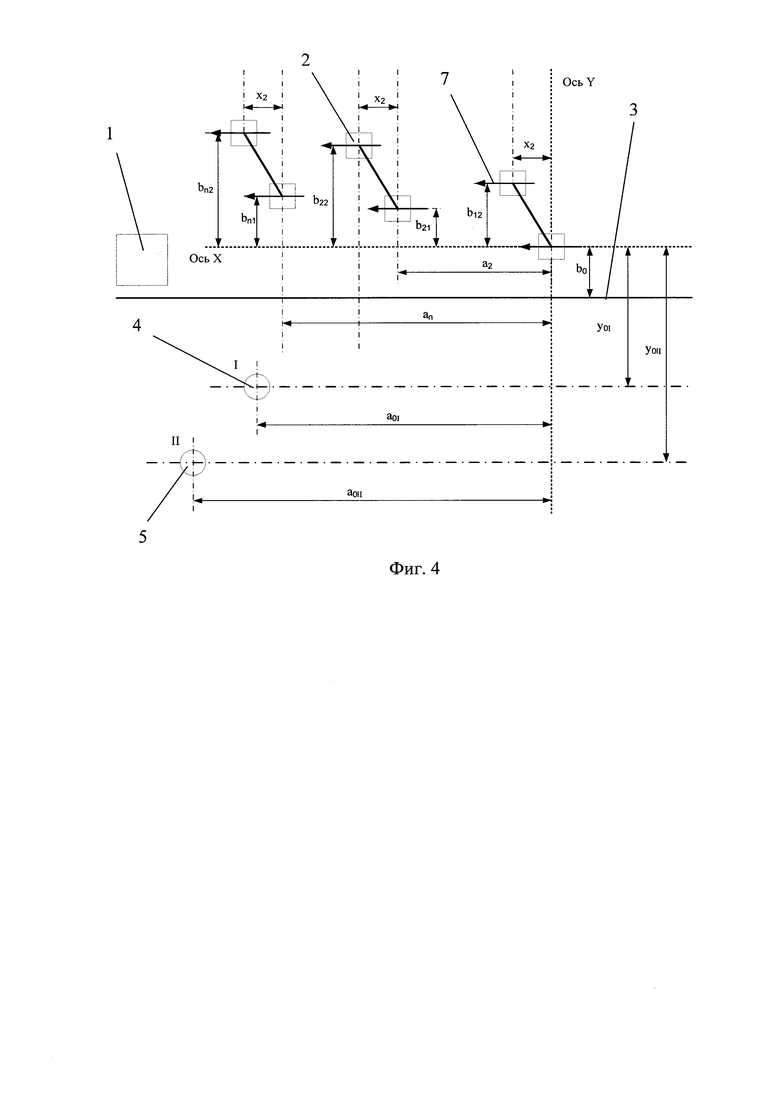
Фиг. 4 - Расположение двух одноэлементных датчиков электромагнитного поля, измеряющего напряженность электромагнитного поля вдоль оси X, при наличии двух параллельных коммуникаций (разрез в плоскости перпендикулярной поверхности грунта).
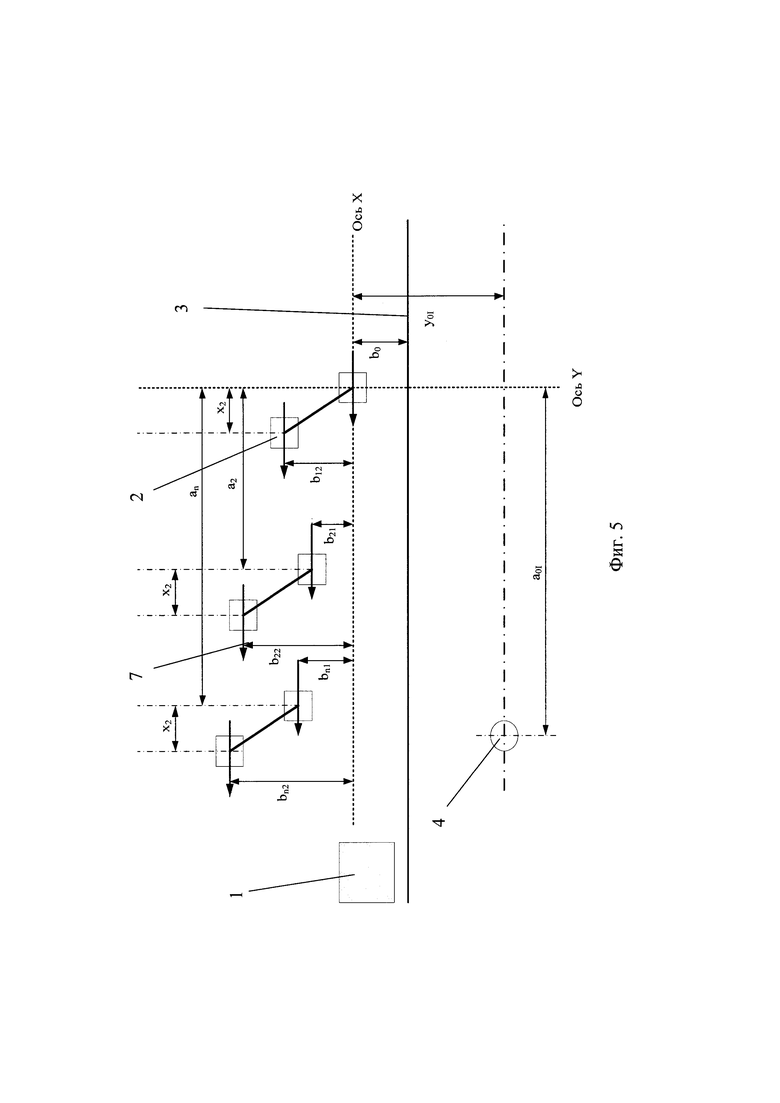
Фиг. 5 - Расположение двух одноэлементных датчиков электромагнитного поля, измеряющих напряженность электромагнитного поля вдоль оси X, при наличии одной коммуникации (разрез в плоскости перпендикулярной поверхности грунта).
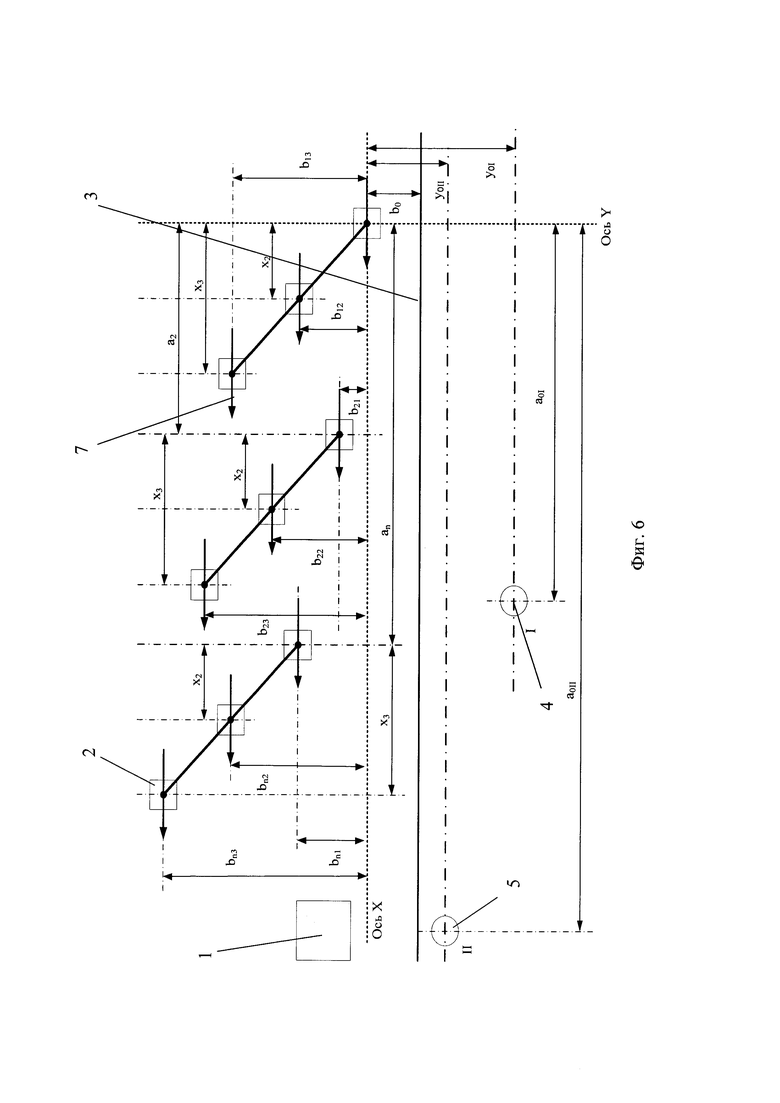
Фиг. 6 - Расположение трех одноэлементных датчиков электромагнитного поля, измеряющих напряженность электромагнитного поля вдоль оси X, при наличии двух коммуникаций (разрез в плоскости перпендикулярной поверхности грунта).
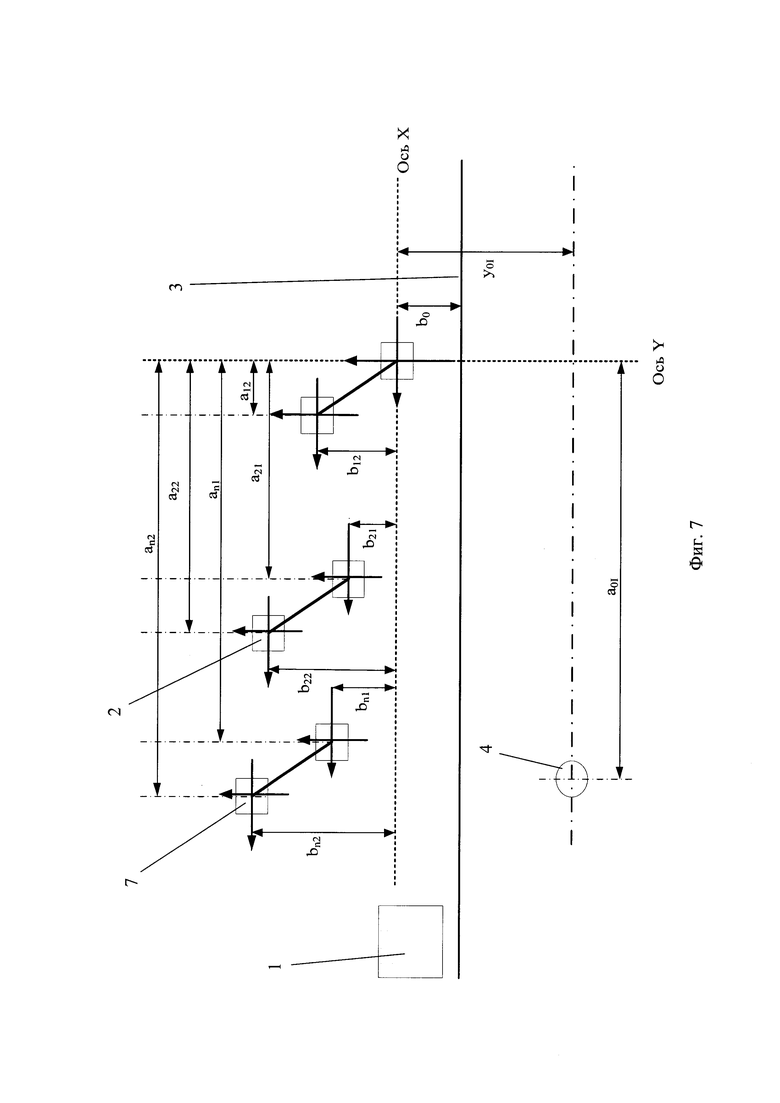
Фиг. 7 - Расположение двух двухэлементных датчиков электромагнитного поля, измеряющих напряженность электромагнитного поля в плоскости, параллельной плоскости XY, при наличии одной коммуникаций (разрез в плоскости перпендикулярной поверхности грунта).
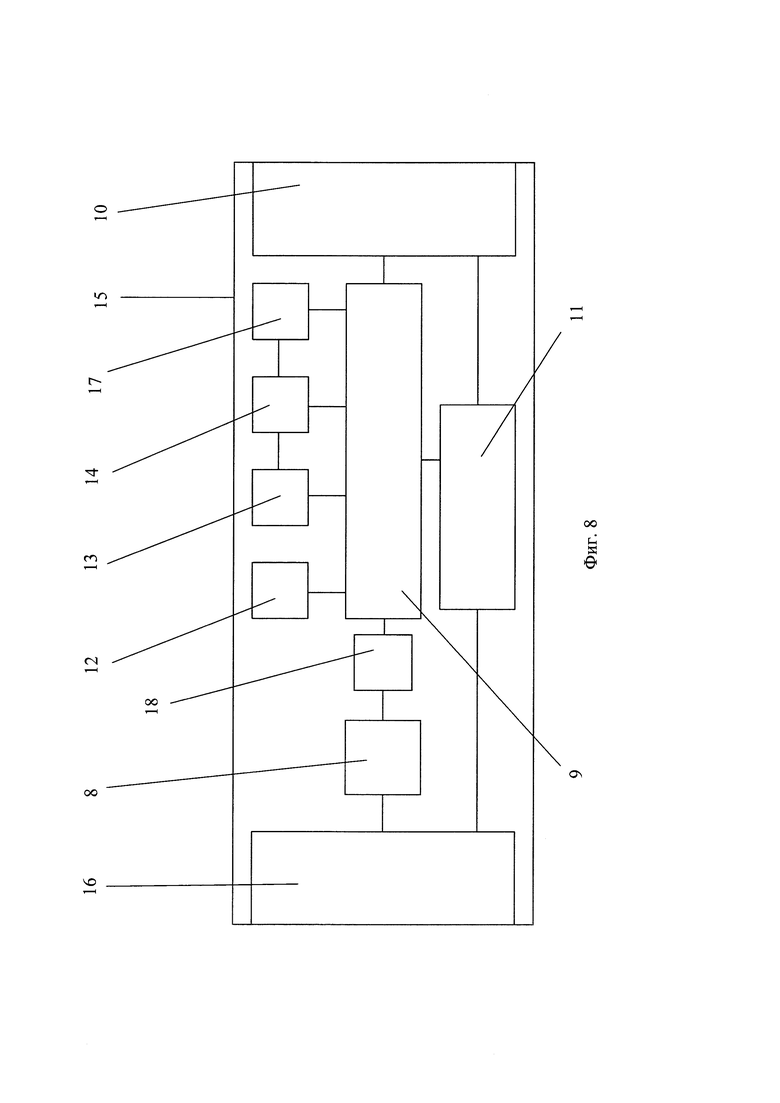
Фиг. 8 - блок-схема устройства для определения места прохождения и глубины залегания подземных коммуникаций с блоком датчиков, содержащим один датчик электромагнитного поля.
1 - источник переменного тока; 2 - датчик электромагнитного поля; 3 - уровень земли; 4 - первая коммуникация; 5 - вторая коммуникация; 6 - продольная ось коммуникации; 7 - ось измерения напряженности электромагнитного поля; 8 - предусилитель; 9 - блок обработки; 10 - индикатор; 11 - блок питания; 12 - коммутатор реперных точек; 13 - блок памяти расстояния между реперными точками; 14 - блок памяти величины электромагнитного поля в реперных точках измеритель расстояния; 15 - корпус устройства; 16 - блок датчиков; 17 - измеритель расстояний, 18 - АЦП.
Ниже приведена расшифровка буквенных обозначений, представленных в описании в выражениях для напряженности электромагнитного поля и на фигурах:
E(1)nd, E(2)nd, E(3)nd - суммарные напряженности электромагнитного поля, измеренные одно- двух- и трехэлементными d-датчиками электромагнитного поля в n-точке измерения соответственно; E(2)1nd, E(2)2nd - напряженности электромагнитного поля, измеренная первым и вторым чувствительными элементами двухэлементного d-датчика электромагнитного поля в n-точке измерения соответственно; E(3)1nd, E(3)2nd, Е(3)3nd - напряженности электромагнитного поля, измеренные первым, вторым и третьим чувствительными элементами трехэлементного d-датчика в n-точке измерения соответственно; E(1)ndm,  - модуль и проекция вектора соответственно напряженности электромагнитного поля в месте расположения одноэлементного d-датчика электромагнитного поля в n-точке измерения, создаваемая m-коммуникацией вдоль оси датчика; E(2)Xndm, E(2)Yndm - напряженности электромагнитного поля в месте расположения двухэлементного d-датчика электромагнитного поля в n-точке измерения, создаваемые m-коммуникацией оси X и оси Y соответственно; E(2)XZndm, E(3)XZndm - напряженности электромагнитного поля в месте расположения двухэлементного и трехэлементного d-датчиков электромагнитного поля в n-точке измерения, создаваемая m-коммуникацией в плоскости, параллельной плоскости XZ, соответственно; E(3)Yndm - напряженность электромагнитного поля, в месте расположения трехэлементного d-датчика электромагнитного поля в n-точке измерения, создаваемая m-коммуникацией вдоль оси Υ; Ε(1)11, Ε(1)21, Е(1)31, Ε(1)41 - суммарные напряженности электромагнитного поля, измеренные первым одноэлементным датчиком электромагнитного поля в первой, второй, третьей и четвертой точках измерений соответственно; Ε(1)12, Ε(1)22, Е(1)32, Ε(1)42 - суммарные напряженности электромагнитного поля, измеренные вторым одноэлементным датчиком электромагнитного поля в первой, второй, третьей и четвертой точках измерений соответственно; Kd - коэффициент преобразования прибора канала d-датчика (под каналом прибора подразумевается чувствительный элемент датчика); KXd, ΚYd, KXZd - коэффициент преобразования прибора каналов Χ, Y и XZ d-датчика соответственно (под каналом прибора подразумевается чувствительный элемент датчика); ΙI - ток в первой коммуникации; III - ток во второй коммуникации; а0m - искомое расстояние до места прохождения m-коммуникации от первого датчика электромагнитного поля в первой точке измерения в плоскости, параллельной плоскости XZ, параллельной линии коммуникации; a0I, а0II - искомое расстояние до места прохождения первой и второй коммуникаций от первого датчика электромагнитного поля в первой точке измерения в плоскости, параллельной плоскости XZ, параллельной линии коммуникации, соответственно; у0m - расстояние от первого датчика электромагнитного поля в первой точке измерения до места прохождения m-коммуникации по оси Y, ортогональной плоскости XZ; у0I, у0II - расстояние от первого датчика электромагнитного поля в первой точке измерения до места прохождения первой и второй коммуникаций по оси Y, ортогональной плоскости XZ, соответственно; аn - известное расстояние, на которое смещен первый датчик электромагнитного поля в n-точке измерения от первой точки измерения по оси X, совпадающей с линией продольной оси датчика; а2, а3, а4 - известное расстояние, на которое смещен первый датчик электромагнитного поля во второй, третьей и четвертой точках измерений от первой точки измерения по оси X, совпадающей с линией продольной оси датчика; fnd - известное расстояние, на которое смещен двухэлементный или трехэлементный d-датчик электромагнитного поля в n-точке измерения от первого датчика в первой точке измерения в плоскости, параллельной плоскости XY; f21, f31 - известное расстояние, на которое смещен двухэлементный или трехэлементный первый датчик электромагнитного поля во второй и третьей точках измерений от первого датчика в первой точке измерения в плоскости, параллельной плоскости XY; f12, f22, f32 - известное расстояние, на которое смещен двухэлементный или трехэлементный второй датчик электромагнитного поля в первой, второй и третьей точках измерений от первого датчика в первой точке измерения в плоскости, параллельной плоскости XY; bnd - известное расстояние, на которое d-датчик электромагнитного поля смещен в n-точку измерения от первой точки измерения по оси Y; b21, b31, b41 - известное расстояние, на которое первый датчик электромагнитного поля смещен во второй, третьей и четвертой точках измерений от начального положения первой точки измерения первым датчиком по оси Y соответственно; b12, b22, b32, b42 - известное расстояние, на которое второй датчик электромагнитного поля смещен в первой, второй, третьей и четвертой точках измерений от начального положения первой точки измерения первым датчиком по оси Y соответственно; сn - известное расстояние, на которое первый датчик электромагнитного поля смещен ортогонально продольной оси датчика в n-точку от первой точки измерений по оси Z, ортогональной оси X; c2, c3, c4 - известные расстояния, на которые первый датчик электромагнитного поля смещен ортогонально продольной оси датчика во вторую, третью и четвертую, точки измерения от первой точки измерений по оси Z, ортогональной оси X, соответственно; α0I, α0II - угол расположения продольной оси датчика электромагнитного поля к нормали к продольной оси первой и второй, коммуникации в плоскости, параллельной плоскости ΧΖ, соответственно; αn - угол поворота оси измерения датчика электромагнитного поля относительно продольной оси датчика в плоскости, параллельной плоскости XZ, в n-точке измерения относительно положения в первой точке измерений; α2, α3, α4 - угол поворота оси измерения датчика электромагнитного поля относительно продольной оси датчика в плоскости, параллельной плоскости XZ, во второй, третьей и четвертой точках измерения, соответственно; zd, xd - известное расстояние, на котором расположен d-датчик электромагнитного поля от первого датчика в блоке датчиков по оси Ζ и X соответственно; z2, х2 - известное расстояние, на котором расположен второй датчик электромагнитного поля от первого датчика в блоке датчиков по оси Ζ и по оси X соответственно; х3 - известное расстояние, на котором расположен третий датчик электромагнитного поля от первого датчика в блоке датчиков по оси X.
- модуль и проекция вектора соответственно напряженности электромагнитного поля в месте расположения одноэлементного d-датчика электромагнитного поля в n-точке измерения, создаваемая m-коммуникацией вдоль оси датчика; E(2)Xndm, E(2)Yndm - напряженности электромагнитного поля в месте расположения двухэлементного d-датчика электромагнитного поля в n-точке измерения, создаваемые m-коммуникацией оси X и оси Y соответственно; E(2)XZndm, E(3)XZndm - напряженности электромагнитного поля в месте расположения двухэлементного и трехэлементного d-датчиков электромагнитного поля в n-точке измерения, создаваемая m-коммуникацией в плоскости, параллельной плоскости XZ, соответственно; E(3)Yndm - напряженность электромагнитного поля, в месте расположения трехэлементного d-датчика электромагнитного поля в n-точке измерения, создаваемая m-коммуникацией вдоль оси Υ; Ε(1)11, Ε(1)21, Е(1)31, Ε(1)41 - суммарные напряженности электромагнитного поля, измеренные первым одноэлементным датчиком электромагнитного поля в первой, второй, третьей и четвертой точках измерений соответственно; Ε(1)12, Ε(1)22, Е(1)32, Ε(1)42 - суммарные напряженности электромагнитного поля, измеренные вторым одноэлементным датчиком электромагнитного поля в первой, второй, третьей и четвертой точках измерений соответственно; Kd - коэффициент преобразования прибора канала d-датчика (под каналом прибора подразумевается чувствительный элемент датчика); KXd, ΚYd, KXZd - коэффициент преобразования прибора каналов Χ, Y и XZ d-датчика соответственно (под каналом прибора подразумевается чувствительный элемент датчика); ΙI - ток в первой коммуникации; III - ток во второй коммуникации; а0m - искомое расстояние до места прохождения m-коммуникации от первого датчика электромагнитного поля в первой точке измерения в плоскости, параллельной плоскости XZ, параллельной линии коммуникации; a0I, а0II - искомое расстояние до места прохождения первой и второй коммуникаций от первого датчика электромагнитного поля в первой точке измерения в плоскости, параллельной плоскости XZ, параллельной линии коммуникации, соответственно; у0m - расстояние от первого датчика электромагнитного поля в первой точке измерения до места прохождения m-коммуникации по оси Y, ортогональной плоскости XZ; у0I, у0II - расстояние от первого датчика электромагнитного поля в первой точке измерения до места прохождения первой и второй коммуникаций по оси Y, ортогональной плоскости XZ, соответственно; аn - известное расстояние, на которое смещен первый датчик электромагнитного поля в n-точке измерения от первой точки измерения по оси X, совпадающей с линией продольной оси датчика; а2, а3, а4 - известное расстояние, на которое смещен первый датчик электромагнитного поля во второй, третьей и четвертой точках измерений от первой точки измерения по оси X, совпадающей с линией продольной оси датчика; fnd - известное расстояние, на которое смещен двухэлементный или трехэлементный d-датчик электромагнитного поля в n-точке измерения от первого датчика в первой точке измерения в плоскости, параллельной плоскости XY; f21, f31 - известное расстояние, на которое смещен двухэлементный или трехэлементный первый датчик электромагнитного поля во второй и третьей точках измерений от первого датчика в первой точке измерения в плоскости, параллельной плоскости XY; f12, f22, f32 - известное расстояние, на которое смещен двухэлементный или трехэлементный второй датчик электромагнитного поля в первой, второй и третьей точках измерений от первого датчика в первой точке измерения в плоскости, параллельной плоскости XY; bnd - известное расстояние, на которое d-датчик электромагнитного поля смещен в n-точку измерения от первой точки измерения по оси Y; b21, b31, b41 - известное расстояние, на которое первый датчик электромагнитного поля смещен во второй, третьей и четвертой точках измерений от начального положения первой точки измерения первым датчиком по оси Y соответственно; b12, b22, b32, b42 - известное расстояние, на которое второй датчик электромагнитного поля смещен в первой, второй, третьей и четвертой точках измерений от начального положения первой точки измерения первым датчиком по оси Y соответственно; сn - известное расстояние, на которое первый датчик электромагнитного поля смещен ортогонально продольной оси датчика в n-точку от первой точки измерений по оси Z, ортогональной оси X; c2, c3, c4 - известные расстояния, на которые первый датчик электромагнитного поля смещен ортогонально продольной оси датчика во вторую, третью и четвертую, точки измерения от первой точки измерений по оси Z, ортогональной оси X, соответственно; α0I, α0II - угол расположения продольной оси датчика электромагнитного поля к нормали к продольной оси первой и второй, коммуникации в плоскости, параллельной плоскости ΧΖ, соответственно; αn - угол поворота оси измерения датчика электромагнитного поля относительно продольной оси датчика в плоскости, параллельной плоскости XZ, в n-точке измерения относительно положения в первой точке измерений; α2, α3, α4 - угол поворота оси измерения датчика электромагнитного поля относительно продольной оси датчика в плоскости, параллельной плоскости XZ, во второй, третьей и четвертой точках измерения, соответственно; zd, xd - известное расстояние, на котором расположен d-датчик электромагнитного поля от первого датчика в блоке датчиков по оси Ζ и X соответственно; z2, х2 - известное расстояние, на котором расположен второй датчик электромагнитного поля от первого датчика в блоке датчиков по оси Ζ и по оси X соответственно; х3 - известное расстояние, на котором расположен третий датчик электромагнитного поля от первого датчика в блоке датчиков по оси X.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Устройство для определения места прохождения и глубины залегания подземных коммуникаций содержит источник (1) переменного тока, подключаемый, по крайней мере, к одной коммуникации (4, 5), блок датчиков (16), содержащий, по крайней мере, один датчик (2) электромагнитного поля, и корпус (15), в котором расположены, по крайней мере, один предусилитель (8) для каждого датчика электромагнитного поля, по крайней мере, один АЦП (18), соединенный с соответствующим предусилителем (18), индикатор (10), блок обработки (9), блок питания (11), коммутатор (12) реперных точек, блок памяти (13) расстояния между реперными точками и блок памяти (14) величины электромагнитного поля в реперных точках, при этом блок датчиков (16) соединен с предусилителем (8), блок питания (11) выполнен с возможностью подачи питания блоку датчиков (16), предусилителю (8), блоку обработки (9) и индикатору (10), а блок обработки (9) соединен с предусилителем (8), индикатором (10), коммутатором (12) реперных точек, блоком памяти (13) расстояния между реперными точками и блоком памяти (14) величины электромагнитного поля в реперных точках.
В качестве датчиков (2) электромагнитного поля применены одноэлементный, двухэлементный или трехэлементный датчики (2) электромагнитного поля, измеряющие напряженность электромагнитного поля вдоль одной оси, в плоскости или в точке пространства соответственно, и содержащие чувствительные элементы.
Блок (16) датчиков расположен вне или в корпусе (15).
При наличии в блоке (16) датчиков более одного датчика (2) электромагнитного поля датчики (2) в блоке (16) разнесены на заранее фиксированные заданные расстояния друг от друга.
В качестве коммутатора (12) применен переключатель на панели прибора, при этом в память прибора введены фиксированные значения расстояний, соответствующие последовательности нажатия переключателя.
Переключатель выполнен с возможностью запуска начала измерения в первой точке, фиксации последующих точек измерения, остановки измерения и синхронизации измерений по времени при помощи таймера, а промежуточные расстояния между точками измерения вычисляются по предварительно занесенному в память алгоритму.
Устройство дополнительно содержит измеритель (17) расстояния, соединенный с блоком (9) обработки.
В качестве измерителя (17) расстояния применена мерная планка, связанная с корпусом (15) устройства и содержащая метки фиксируемых расстояний, занесенных в память прибора.
В качестве измерителя (17) расстояния применено мерное колесо.
В качестве измерителя (17) расстояния применен акселерометр, при фиксации промежуточных точек по предварительно занесенному в память алгоритму.
В качестве измерителя (17) расстояния применена комбинация приборов, выполненных с возможностью дополнительного измерения углов поворота оси измерения датчиков (2) электромагнитного поля и включающих в себя акселерометр, альтиметр, магнетометр, электронный гироскоп, соединенные с блоком обработки (9), при фиксации промежуточных точек по предварительно занесенному в память алгоритму.
В качестве измерителя (17) расстояния применена GPS система при фиксации промежуточных точек по предварительно занесенному в память алгоритму.
Способ определения глубины залегания и расстояния до места прохождения коммуникаций (4, 5) основан на измерении напряженности электромагнитного поля в нескольких произвольных точках измерения при помощи датчиков (2) электромагнитного поля и определении глубины залегания и расстояния, по крайней мере, до одной коммуникации на основе решения нелинейных уравнений в соответствии выражениями для напряженности электромагнитного поля осуществляется при помощи устройства. Напряженность электромагнитного поля определяют в соответствии с выражением:  где Е - напряженность электромагнитного поля; K - коэффициент преобразования канала прибора (под каналом прибора подразумевается чувствительный элемент датчика), I - ток в коммуникации, R - расстояние до коммуникации. Коэффициент «К» подбирается при настройке прибора. Параметр «R» определяют в соответствии с выражениями в знаменателе, раскрытыми в нижеследующих примерах, в зависимости от применяемых датчиков (2) электромагнитного поля в блоке (16).
где Е - напряженность электромагнитного поля; K - коэффициент преобразования канала прибора (под каналом прибора подразумевается чувствительный элемент датчика), I - ток в коммуникации, R - расстояние до коммуникации. Коэффициент «К» подбирается при настройке прибора. Параметр «R» определяют в соответствии с выражениями в знаменателе, раскрытыми в нижеследующих примерах, в зависимости от применяемых датчиков (2) электромагнитного поля в блоке (16).
Работа устройства в каждой точке измерения в соответствии с фиг. 8 осуществляется следующим образом. Сигнал с источника переменного тока (1) подается в коммуникации (4, 5) с использованием контактного или бесконтактного метода. Наведенное в коммуникации электромагнитное излучение измеряется чувствительным элементом датчика электромагнитного поля (2), в качестве которого может выступать одно-, двух- или трехэлементный датчики, в блоке (16) может находиться несколько датчиков, разнесенных на заранее известные расстояния. Сигнал напряженности электромагнитного поля с чувствительного элемента датчика (2) поступает на предусилитель (8), где усиливается, а затем на АЦП (18) и поступает в блок обработки (9). При этом при наличии двух или трех чувствительных элементов в датчике или в блоке (16) датчиков более одного датчика (2) электромагнитного поля устройство содержит более одного предусилителя (8) и АЦП для каждого чувствительного элемента датчика (2) электромагнитного поля, например при наличии двух одноэлементных датчиков (2) электромагнитного поля в устройстве первый датчик (2) электромагнитного поля связан с одним предусилителем (8) и АЦП, а второй датчик (2) электромагнитного поля связан с другим предусилителем (8) и АЦП. Измеритель расстояния (17) фиксирует значение координаты и угол поворота оси измерения датчика (2) и передает данные в блок обработки (9). По сигналу коммутатора (12) измеренное значение электромагнитного поля и вычисленное или заданное значение расстояния заносятся в блок памяти (14) величины электромагнитного поля в реперных точках и блок памяти (13) расстояния между реперными точками. После завершения измерений в блоке обработки (9) выполняется расчет искомых расстояний на основе решения соответствующих систем нелинейных уравнений. Результаты расчета выводятся на индикатор (10).
Пример 1
В соответствии с фиг. 1 и 3 определяют глубину залегания (yI) и расстояния (а0I) до места прохождения первой (одной) коммуникации (4) при использовании блока (16) датчиков, содержащего один одноэлементный датчик (2) электромагнитного поля в соответствии с выражением для напряженности электромагнитного поля:  ;
;

При этом измерения напряженности электромагнитного поля осуществляют в плоскости (α0I=0) перпендикулярной продольной оси коммуникации (4), при размещении оси измерения одноэлементного датчика (2) вдоль оси X и постоянном угле (αn=0) оси измерения датчика (2) при перемещении блока (16) датчиков от первой точки измерения. В этом случае в выражении для напряженности электромагнитного поля cn, zd, xd, α0m, αn всегда равны нулю, a bnd, аn, в первой точке измерения равны нулю, при этом получаем три неизвестных - ΙI, у0I, а0I, следовательно, необходимо провести три измерения напряженности электромагнитного поля.
Для измерения напряженности электромагнитного поля источник (1) переменного тока подключают к коммуникации (4), генерируют переменный испытательный сигнал и подают его в коммуникацию (4), определяют примерную трассу прокладки до коммуникации (4) и место положения первой точки измерения.
Примерную трассу прокладки до коммуникации (4) определяют на основании имеющихся топографических схем или при использовании простейших методов трассировки, например метода максимума при помощи одноэлементного датчика (Шалыт Г.М. Определение места повреждения в электрических сетях. М., 1982). Место положения первой точки измерения определяют путем проведения начальных измерений и получения достоверного электромагнитного сигнала на датчиках.
Затем устанавливают блок датчиков (16), содержащий один одноэлементный датчик (2) в первую точку измерения на высоте b0 от уровня земли (3). После чего при помощи одноэлементного датчика (2) измеряют величину напряженности электромагнитного поля в первой точке и при помощи коммутатора (12) фиксируют величину напряженности (E(1)11) электромагнитного поля и высоту (b0) над уровнем земли в первой точке измерения на одноэлементном датчике (2) в блоке (16).
После чего блок датчиков (16) перемещают во вторую произвольную точку измерения на известные расстояния (b21) и (а2), измеряют в данной точке величину напряженности электромагнитного поля и при помощи коммутатора (12) в данной точке фиксируют величину напряженности электромагнитного поля (E(1)21) и изменение координат (b21 и а2), на которое перемещают блок (16) датчиков от первой точки измерения.
Затем блок (16) датчиков перемещают в третью произвольную точку измерения на известные расстояния (b31) и (а3), измеряют в данной точке величину напряженности электромагнитного поля и при помощи коммутатора (12) в данной точке фиксируют величину напряженности электромагнитного поля (E(1)31) и изменение координат (b31 и а3), на которое перемещают блок (16) датчиков от первой точки измерения.
На основе решения системы нелинейных уравнений с тремя неизвестными - II, у0I, a0I определяют глубину залегания и расстояние до коммуникации (4) в соответствии с выражениями для напряженности электромагнитного поля:


Искомое расстояние (y1) от поверхности грунта до места прохождения первой коммуникации (4) по оси Y, ортогональной плоскости XZ, определяют из выражения:
уI=у0I-b0.
Пример 2
В соответствии с фиг. 1 и 3 определяют глубину залегания (yI) и расстояния (а0I) до места прохождения первой коммуникации (4) при использовании блока (16) датчиков, содержащего один одноэлементный датчик (2) электромагнитного поля, при этом предварительно определяется примерная трасса прокладки при помощи одноэлементного датчика электромагнитного поля, выполненного с возможностью изменения угла его оси измерения, в соответствии с выражением для напряженности электромагнитного поля:
;
При этом измерения напряженности электромагнитного поля осуществляют в плоскости (α0I≠0), не перпендикулярной продольной оси коммуникации (4), при размещении оси измерения одноэлементного датчика (2) вдоль оси X и изменяющемся угле (αn≠0) оси измерения датчика (2) при перемещении блока (16) датчиков от первой точки измерения. В этом случае в выражении для напряженности электромагнитного поля zd, xd всегда равны нулю, a cn, bnd, аn, αn в первой точке измерения равны нулю, в результате получаем четыре неизвестных - II, у0I, a0I, α0I, следовательно, необходимо провести четыре измерения напряженности электромагнитного поля.
Измерения напряженности электромагнитного поля осуществляют в соответствии с примером 1, за исключением того, что необходимо провести измерения напряженности электромагнитного в четырех точках измерения и фиксации в каждой точке при помощи коммутатора (12) соответствующих параметров, при этом в точках измерения, кроме первой, изменяется угол оси измерения датчика (2). Система нелинейных уравнений для определения глубины залегания и расстояния до коммуникации следующая:



Искомое расстояние (yI) от поверхности грунта до места прохождения первой коммуникаций (4) по оси Y, ортогональной плоскости XZ, определяют из выражения:
уI=у0I-b0.
Пример 3
В соответствии с фиг. 1 и 4 определяют глубину залегания (уI, уII) и расстояния (а0I, а0II) до места прохождения двух произвольно расположенных коммуникаций (4, 5), при использовании блока (16) датчиков, содержащего два одноэлементных датчика (2) электромагнитного поля, при этом предварительно определяется примерная трасса прокладки при помощи двух одноэлементных датчиков электромагнитного поля, выполненных с возможностью изменения угла его оси измерения, в соответствии с выражением для напряженности электромагнитного поля: ;
При этом измерения напряженности электромагнитного поля осуществляют в плоскости (α0m≠0), не перпендикулярной продольной оси коммуникации, при размещении оси измерения одноэлементного датчика (2) вдоль оси X и изменяющемся угле (αn≠0) оси измерения датчика (2) при перемещении блока (16) датчиков от первой точки измерения. В этом случае в выражении для напряженности электромагнитного поля cn, bnd, an, αn в первой точке равны нулю, в результате получаем восемь неизвестных II, III, y0I, у0II, a0I, а0II, α0I, α0II, следовательно, необходимо провести восемь измерений напряженности электромагнитного поля.
Измерения напряженности электромагнитного поля осуществляют в соответствии с примером 1 за исключением того, что необходимо провести восемь измерений напряженности электромагнитного поля, по два измерения в каждом из четырех перемещений блока (16) датчиков и фиксации в каждой точке при помощи коммутатора (12) соответствующих параметров, при этом в точках измерения, кроме первой, измеряется угол поворота оси измерения датчика (2). Система нелинейных уравнений для определения глубины залегания и расстояния до коммуникации следующая:






Искомые расстояния (yI, уII) от поверхности грунта до места прохождения первой и второй коммуникаций (4, 5) по оси Y, ортогональной плоскости XZ, определяют из выражений:
yI=y0I-b0; уII=у0II-b0.
Пример 4
В соответствии с фиг. 1 и 4 определяют глубину залегания (yI, уII) и расстояния (а0I, а0II) до места прохождения двух параллельно расположенных коммуникаций (4, 5), при использовании блока (16) датчиков, содержащего два одноэлементных датчика (2) электромагнитного поля, при этом предварительно определяется примерная трасса прокладки при помощи двух одноэлементных датчиков электромагнитного поля, в соответствии с выражением для напряженности электромагнитного поля: ;

При этом измерения напряженности электромагнитного поля осуществляют в плоскости (α0m≠0), не перпендикулярной продольной оси коммуникации (4, 5), при размещении оси измерения одноэлементного датчика (2) вдоль оси X и постоянном угле (аn=0) оси измерения датчика (2) при перемещении блока (16) датчиков от первой точки измерения. В этом случае в выражении для напряженности электромагнитного поля αn всегда равны нулю, a cn, bnd, аn, в первой точке равны нулю, в результате получаем семь неизвестных II, III, у0I, у0II, a0I, а0II, α0I=α0II, следовательно, необходимо провести семь измерений напряженности электромагнитного поля.
Измерения напряженности электромагнитного поля осуществляют в соответствии с примером 1 за исключением того, что необходимо провести семь измерений напряженности электромагнитного поля, по два измерения в каждом из трех перемещений блока (16) датчиков и одно измерение в четвертой точке и фиксации в каждой точке при помощи коммутатора (12) соответствующих параметров, при этом во всех точках измерения не изменяется угол оси измерения датчика (2). Система нелинейных уравнений для определения глубины залегания и расстояния до коммуникации следующая:





Искомые расстояния (yI, уII) от поверхности грунта до места прохождения первой и второй коммуникаций (4, 5) по оси Y, ортогональной плоскости XZ, определяют из выражений:
yI=y0I-b0; уII=у0II-b0.
Пример 5
В соответствии с фиг. 1 и 4 определяют глубину залегания (yI, уII) и расстояния (а0I, а0II) до места прохождения двух параллельно расположенных коммуникаций (4, 5), при использовании блока (16) датчиков, содержащего два одноэлементных датчика (2) электромагнитного поля, при этом предварительно определяется примерная трасса прокладки при помощи двух одноэлементных датчиков электромагнитного поля, в соответствии с выражением для напряженности электромагнитного поля:
 ;
;
При этом измерения напряженности электромагнитного поля осуществляют в плоскости (α0m=0), перпендикулярной продольной оси коммуникации (4, 5), при размещении оси измерения одноэлементного датчика (2) вдоль оси X и постоянном угле (αn=0) оси измерения датчика (2) при перемещении блока (16) датчиков от первой точки измерения. В этом случае в выражении для напряженности электромагнитного поля сn, αn, α0m всегда равны нулю, a bnd, аn, в первой точке равны нулю, в результате получаем шесть неизвестных II, III, у0I, у0II, а0I, а0II, следовательно, необходимо провести шесть измерений напряженности электромагнитного поля.
Измерения напряженности электромагнитного поля осуществляют в соответствии с примером 1 за исключением того, что необходимо провести шесть измерений напряженности электромагнитного поля, по два измерения в каждом из трех перемещений блока (16) датчиков и фиксации в каждой точке при помощи коммутатора (12) соответствующих параметров, при этом во всех точках измерения не изменяется угол оси измерения датчика (2). Система нелинейных уравнений для определения глубины залегания и расстояния до коммуникации следующая:






Искомые расстояния (yI, уII) от поверхности грунта до места прохождения первой и второй коммуникаций (4, 5) по оси Y, ортогональной плоскости XZ, определяют из выражений:
yI=y0I-b0; уII=у0II-b0.
Пример 6
В соответствии с фиг. 1 и 4 определяют глубину залегания (yI, yI) и расстояния (а0I, а0II) до места прохождения двух произвольно расположенных коммуникаций (4, 5), при использовании блока (16) датчиков, содержащего два одноэлементных датчика (2) электромагнитного поля, при этом предварительно определяется примерная трасса прокладки при помощи двух одноэлементных датчиков электромагнитного поля, выполненных с возможностью изменения угла его оси измерения относительно второй коммуникации, в соответствии с выражением для напряженности электромагнитного поля:  ;
;

При этом измерения напряженности электромагнитного поля осуществляют таким образом, что для первой коммуникации (4) одноэлементные датчики (2) измеряют напряженность в плоскости (α0I=0), перпендикулярной продольной оси коммуникации (4), а для второй коммуникации (5) одноэлементные датчики (2) измеряют напряженность в плоскости (α0II≠0), не перпендикулярной продольной оси коммуникации (5), при размещении оси измерения одноэлементного датчика (2) вдоль оси X и постоянном угле (αn=0) оси измерения датчика при перемещении блока датчиков от первой точки измерения. В этом случае в выражении для напряженности электромагнитного поля сn (для первой коммуникации), zd, α0I, αn, всегда равны нулю, а сn (для второй коммуникации), bnd, аn, в первой точке равны нулю, в результате получаем семь неизвестных II, III, у0I, у0II, а0I, a0II, α0II, следовательно, необходимо провести семь измерений напряженности электромагнитного поля.
Измерения напряженности электромагнитного поля осуществляют в соответствии с примером 1 за исключением того, что необходимо провести семь измерений напряженности электромагнитного поля, по два измерения в каждом из трех перемещений блока (16) датчиков и одно измерение в четвертой точке и фиксации в каждой точке при помощи коммутатора (12) соответствующих параметров, при этом во всех точках измерения не изменяется угол оси измерения датчика (2) относительно положения в первой точке. Система нелинейных уравнений для определения глубины залегания и расстояния до коммуникации следующая:







Искомые расстояния (уI, уII) от поверхности грунта до места прохождения первой и второй коммуникаций (4, 5) по оси Y, ортогональной плоскости XZ, определяют из выражений:
yI=y0I-b0; уII=у0II-b0.
Пример 7
В соответствии с фиг. 1 и 6 определяют глубину залегания (уI, уII) и расстояния (а0I, а0II) до места прохождения двух произвольно расположенных коммуникаций (4, 5), при использовании блока (16) датчиков, содержащего три одноэлементных датчика (2) электромагнитного поля, при этом предварительно определяется примерная трасса прокладки при помощи трех одноэлементных датчиков электромагнитного поля, выполненных с возможностью изменения угла его оси измерения, в соответствии с выражением для напряженности электромагнитного поля:  ;
;

При этом измерения напряженности электромагнитного поля осуществляют в плоскости (α0m≠0), не перпендикулярной продольной оси коммуникации (4, 5), при размещении оси измерения одноэлементного датчика (2) вдоль оси X и при изменяющемся угле (αn≠0) оси измерения датчика (2) при перемещении блока (16) датчиков от первой точки измерения. В этом случае в выражении для напряженности электромагнитного поля cn, bnd, аn, αn в первой точке равны нулю, в результате получаем восемь неизвестных II, III, у0I, у0II, а0I, α0I, а0II, α0II, следовательно, необходимо провести восемь измерений напряженности электромагнитного поля.
Измерения напряженности электромагнитного поля осуществляют в соответствии с примером 1 за исключением того, что необходимо провести измерения восемь измерений напряженности электромагнитного поля, по три измерения в каждом из двух перемещений блока (16) датчиков и два измерения в третей точке и фиксации в каждой точке при помощи коммутатора (12) соответствующих параметров, при этом в точках измерения, кроме первой изменяется угол оси измерения датчика (2). Система нелинейных уравнений для определения глубины залегания и расстояния до коммуникации следующая:




Искомые расстояния (уI, уII) от поверхности грунта до места прохождения первой и второй коммуникаций (4, 5) по оси Y, ортогональной плоскости XZ, определяют из выражений:
yI=y0I-b0; уII=у0II-b0.
Пример 8
В соответствии с фиг. 2 и 7 определяют глубину залегания (уI, уII) и расстояния (a0I, а0II) до места прохождения двух параллельно расположенных коммуникаций (4, 5), при использовании блока (16) датчиков, содержащего два двухэлементных датчика (2) электромагнитного поля в соответствии, при этом предварительно определяется примерная трасса прокладки при помощи двух двухэлементных датчиков электромагнитного поля, с выражением для напряженности электромагнитного поля:


При этом измерения напряженности электромагнитного поля осуществляют в плоскости, перпендикулярной продольной оси коммуникации (4, 5), при ортогональном размещении осей измерения двухэлементных датчиков (2) относительно друг друга в плоскости XY и их произвольном расположении в плоскости XY. В этом случае получаем шесть неизвестных II, III, у0I, у0II, а0I, а0II, следовательно, необходимо провести шесть измерений напряженности электромагнитного поля.
Измерения напряженности электромагнитного поля осуществляют в соответствии с примером 1 за исключением того, что в блоке (16) датчиков применяют два двухэлементных датчика (2), а также необходимо провести измерения шесть измерений напряженности электромагнитного поля, по два измерения в каждом из трех перемещений блока (16) датчиков и фиксации в каждой точке при помощи коммутатора (12) соответствующих параметров. Система нелинейных уравнений для определения глубины залегания и расстояния до коммуникации следующая:




Искомые расстояния (уI, уII) от поверхности грунта до места прохождения первой и второй коммуникаций (4, 5) по оси Y, ортогональной плоскости XZ, определяют из выражений:
yI=y0I-b0; уII=у0II-b0.
Пример 9
В соответствии с фиг. 2 и 7 определяют глубину залегания (уI, уII) и расстояния (а0I, а0II) до места прохождения двух параллельно расположенных коммуникаций (4, 5), при использовании блока (16) датчиков, содержащего два двухэлементных датчика (2) электромагнитного поля, при этом предварительно определяется примерная трасса прокладки при помощи двух двухэлементных датчиков электромагнитного поля, в соответствии с выражением для напряженности электромагнитного поля:



При этом измерения напряженности электромагнитного поля осуществляют в плоскости, перпендикулярной продольной оси коммуникации, при ортогональном размещении осей измерения двухэлементных датчиков (2) относительно друг друга в плоскости XZ и их произвольном расположении в плоскости XZ. В этом случае получаем шесть неизвестных II, III, у0I, у0II, а0I, а0II, следовательно, необходимо провести шесть измерений напряженности электромагнитного поля.
Измерения напряженности электромагнитного поля осуществляют в соответствии с примером 1 за исключением того, что в блоке (16) датчиков применяют два двухэлементных датчика (2), а также необходимо провести шесть измерений напряженности электромагнитного поля, по два измерения в каждом из трех перемещений блока (16) датчиков и фиксации в каждой точке при помощи коммутатора (12) соответствующих параметров. Система нелинейных уравнений для определения глубины залегания и расстояния до коммуникации следующая:






Искомые расстояния (уI, уII) от поверхности грунта до места прохождения первой и второй коммуникаций (4, 5) по оси Y, ортогональной плоскости XZ, определяют из выражений:
yI=y0I-b0; уII=у0II-b0.
Пример 10
В соответствии с фиг. 2 и 7 определяют глубину залегания (уI, уII) и расстояния (а0I, а0II) до места прохождения двух параллельно расположенных коммуникаций (4, 5), при использовании блока (16) датчиков, содержащего два трехэлементных датчика (2) электромагнитного поля в соответствии с выражением для напряженности электромагнитного поля:




При этом измерения напряженности электромагнитного поля осуществляют в плоскости, перпендикулярной продольной оси коммуникации, при ортогональном размещении осей измерения трехэлементных датчиков (2) относительно друг друга и их произвольном расположении. В этом случае получаем шесть неизвестных II, III, у0I, у0II, а0I, а0II, следовательно, необходимо провести шесть измерений напряженности электромагнитного поля.
Измерения напряженности электромагнитного поля осуществляют в соответствии с примером 1 за исключением того, что в блоке (16) датчиков применяют два трехэлементных датчика (2), а также необходимо провести шесть измерений напряженности электромагнитного поля, по два измерения в каждом из трех перемещений блока (16) датчиков и фиксации в каждой точке при помощи коммутатора соответствующих параметров. Система нелинейных уравнений для определения глубины залегания и расстояния до коммуникации следующая:






Искомые расстояния (уI, уII) от поверхности грунта до места прохождения первой и второй коммуникаций (4, 5) по оси Y, ортогональной плоскости XZ, определяют из выражений:
yI=y0I-b0; уII=у0II-b0.
Таким образом, предлагаемая группа изобретений позволяет повысить точность и снизить трудоемкости измерений за счет того, что проводят измерения в нескольких точках и в сложных условиях, при наличии препятствий, оператор может выбрать произвольную траекторию для проведения измерений и определить расстояние до коммуникаций и их глубину залегания даже в случае наличия нескольких коммуникаций. Это снижает трудоемкость и позволяет повысить точность в сложных условиях.
Изобретение было раскрыто выше со ссылкой на конкретный вариант его осуществления. Для специалистов могут быть очевидны и иные варианты осуществления изобретения, не меняющие его сущности, как она раскрыта в настоящем описании. Соответственно, изобретение следует считать ограниченным по объему только нижеследующей формулой изобретения.
Изобретение относится к измерительной технике и может быть использовано для поиска места прохождения и глубины залегания кабельных линий, трубопроводов, газо- и нефтепроводов, находящихся под землей. Технический результат: повышение точности и снижение трудоемкости измерений. Сущность: подключают источник переменного тока к коммуникации, генерируют переменный испытательный сигнал, определяют примерную трассу прокладки коммуникации и место положения начальной точки измерения. Далее устанавливают блок датчиков, содержащий, по крайней мере, один датчик электромагнитного поля в первую точку измерения, при помощи которого измеряют величину напряженности электромагнитного поля в первой точке на каждом датчике в блоке. После чего при помощи коммутатора фиксируют величину напряженности электромагнитного поля и высоту над уровнем земли в первой точке измерения на каждом датчике в блоке. Перемещают блок датчиков в произвольную точку измерения на известные расстояния, по крайней мере, по одной координате. Измеряют в данной точке величину напряженности электромагнитного поля на каждом датчике. При помощи коммутатора в данной точке фиксируют величину напряженности электромагнитного поля на каждом датчике и изменение координат, на которое перемещают блок датчиков электромагнитного поля от первой точки измерения. Повторяют операцию необходимое количество раз в зависимости от заданной точности измерения, характеризующейся количеством коммуникаций и датчиков электромагнитного поля в блоке. Определяют глубину залегания и расстояние, по крайней мере, до одной коммуникации на основе решения нелинейных уравнений в соответствии выражениями для напряженности электромагнитного поля. 2 н. и 19 з.п. ф-лы, 8 ил.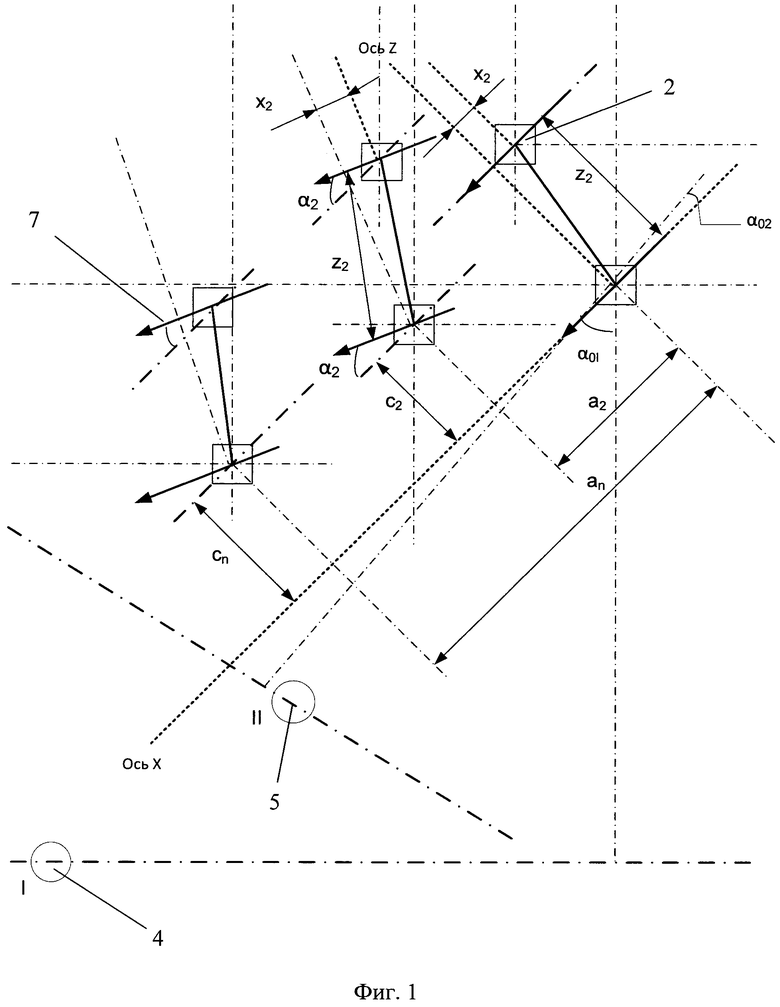
1. Способ определения глубины залегания и расстояния до места прохождения, по крайней мере, одной коммуникации, характеризующийся тем, что подключают источник переменного тока, по крайней мере, к одной коммуникации, генерируют переменный испытательный сигнал и подают его, по крайней мере, в одну коммуникацию, определяют примерную трассу прокладки, по крайней мере, одной коммуникации и место положения первой точки измерения, после чего:
a) устанавливают блок датчиков, содержащий, по крайней мере, один датчик электромагнитного поля, в первую точку измерения, при помощи которого измеряют величину напряженности электромагнитного поля в первой точке на каждом датчике в блоке, после чего при помощи коммутатора фиксируют величину напряженности электромагнитного поля в первой точке измерения на каждом датчике в блоке и высоту над уровнем земли первого датчика в блоке;
b) перемещают блок датчиков в произвольную точку измерения на известные расстояния по одной координате, измеряют в данной точке величину напряженности электромагнитного поля на каждом датчике и при помощи коммутатора в данной точке фиксируют величину напряженности электромагнитного поля на каждом датчике и изменение координат, на которое перемещают блок датчиков электромагнитного поля от первой точки измерения, отличающийся тем, что блок датчиков на стадии b) дополнительно перемещают, по крайней мере, еще по одной координате;
c) повторяют операцию b) необходимое количество раз в зависимости от заданной точности измерения, характеризующейся количеством коммуникаций и датчиков электромагнитного поля в блоке;
d) определяют глубину залегания и расстояние, по крайней мере, до одной коммуникации на основе решения нелинейных уравнений в соответствии с выражениями для напряженности электромагнитного поля.
2. Способ по п. 1, отличающийся тем, что глубину залегания и расстояние, по крайней мере, до одной коммуникации определяют на основе решения системы нелинейных уравнений в соответствии с выражениями для напряженности электромагнитного поля при помощи блока обработки устройства определения глубины залегания и расстояния до места прохождения подземной коммуникации, при этом глубину залегания коммуникации относительно уровня грунта определяют как разницу глубины залегания коммуникации относительно первого датчика в первой точке измерения и высоты над уровнем грунта первого датчика в первой точке измерения.
3. Способ по п. 1 или 2, отличающийся тем, что повторяют операции а) - с) не менее трех раз и определяют глубину залегания и расстояния до места прохождения, по крайней мере, до одной подземной коммуникации как среднее из полученных значений.
4. Способ по п. 2, отличающийся тем, что при проведении измерений напряженности электромагнитного поля при наличии, по крайней мере, одной коммуникации и при помощи блока датчиков, содержащего, по крайней мере, один одноэлементный датчик электромагнитного поля, содержащий один чувствительный элемент, ось измерения которого размещена вдоль оси X, причем при наличии более одного одноэлементного датчика электромагнитного поля датчики в блоке разнесены на заранее фиксированные заданные расстояния друг от друга, при их параллельном расположении и переносе в новую точку измерения в блоке друг относительно друга, при этом измерение напряженности электромагнитного поля осуществляют в плоскости, перпендикулярной или не перпендикулярной продольной оси коммуникаций, при постоянном или изменяющемся угле осей измерения датчиков напряженности электромагнитного поля и фиксации расстояний, на которые смещены датчики и углы, на которые повернуты оси датчиков от положения в первой точке измерения, причем при наличии более одной коммуникации измерения напряженности электромагнитного поля осуществляют при их произвольном или параллельном расположении, при этом напряженность электромагнитного поля определяется как модуль векторной суммы напряженности электромагнитного поля от каждой m-коммуникации в точке d-датчика и в n-точке измерений из выражений:


где E(1)nd - суммарная напряженность электромагнитного поля, измеренная одноэлементным d-датчиком в n-точке измерения; E(1)ndm,  - модуль и проекция вектора соответственно напряженности электромагнитного поля в месте расположения одноэлементного d-датчика электромагнитного поля в n-точке измерения, создаваемая m-коммуникацией вдоль оси датчика; Kd - коэффициент преобразования прибора канала d-датчика; Im - ток в m-коммуникации; a0m - искомое расстояние до места прохождения m-коммуникации от первого датчика электромагнитного поля в первой точке измерения в плоскости, параллельной плоскости XZ, параллельной линии коммуникации; y0m - расстояние от первого датчика электромагнитного поля в первой точке измерения до места прохождения m-коммуникации по оси Y, ортогональной плоскости XZ; bnd - известное расстояние, на которое d-датчик электромагнитного поля смещен в n-точку измерения от первой точки измерения по оси Y; cn - известное расстояние, на которое первый датчик электромагнитного поля смещен ортогонально продольной оси датчика в n-точку от первой точки измерений по оси Z, ортогональной оси X; an - известное расстояние, на которое смещен первый датчик электромагнитного поля в n-точке измерения от первой точки измерения по оси X, совпадающей с линией продольной оси датчика; xd, zd - известное расстояние, на котором расположен d-датчик электромагнитного поля от первого датчика в блоке датчиков по оси X и Z соответственно; α0m - угол расположения продольной оси датчика электромагнитного поля к нормали к продольной оси m-коммуникации в первой точке измерений в плоскости, параллельной плоскости XZ; αn - угол поворота оси измерения датчика электромагнитного поля относительно продольной оси датчика в плоскости, параллельной плоскости XZ, в n-точке измерения относительно положения в первой точке измерений, причем на основе выражений для напряженности электромагнитного поля в точке d-датчика и в n-точке измерений определяют расстояние до места прохождения m-коммуникации в плоскости, параллельной плоскости XZ, и глубину залегания на основе решения системы нелинейных уравнений с неизвестными - a0m, y0m, Im, α0m, в которой количество измерений равно или больше количества неизвестных, а количество данных, полученных с датчиков, больше или равно количеству неизвестных.
- модуль и проекция вектора соответственно напряженности электромагнитного поля в месте расположения одноэлементного d-датчика электромагнитного поля в n-точке измерения, создаваемая m-коммуникацией вдоль оси датчика; Kd - коэффициент преобразования прибора канала d-датчика; Im - ток в m-коммуникации; a0m - искомое расстояние до места прохождения m-коммуникации от первого датчика электромагнитного поля в первой точке измерения в плоскости, параллельной плоскости XZ, параллельной линии коммуникации; y0m - расстояние от первого датчика электромагнитного поля в первой точке измерения до места прохождения m-коммуникации по оси Y, ортогональной плоскости XZ; bnd - известное расстояние, на которое d-датчик электромагнитного поля смещен в n-точку измерения от первой точки измерения по оси Y; cn - известное расстояние, на которое первый датчик электромагнитного поля смещен ортогонально продольной оси датчика в n-точку от первой точки измерений по оси Z, ортогональной оси X; an - известное расстояние, на которое смещен первый датчик электромагнитного поля в n-точке измерения от первой точки измерения по оси X, совпадающей с линией продольной оси датчика; xd, zd - известное расстояние, на котором расположен d-датчик электромагнитного поля от первого датчика в блоке датчиков по оси X и Z соответственно; α0m - угол расположения продольной оси датчика электромагнитного поля к нормали к продольной оси m-коммуникации в первой точке измерений в плоскости, параллельной плоскости XZ; αn - угол поворота оси измерения датчика электромагнитного поля относительно продольной оси датчика в плоскости, параллельной плоскости XZ, в n-точке измерения относительно положения в первой точке измерений, причем на основе выражений для напряженности электромагнитного поля в точке d-датчика и в n-точке измерений определяют расстояние до места прохождения m-коммуникации в плоскости, параллельной плоскости XZ, и глубину залегания на основе решения системы нелинейных уравнений с неизвестными - a0m, y0m, Im, α0m, в которой количество измерений равно или больше количества неизвестных, а количество данных, полученных с датчиков, больше или равно количеству неизвестных.
5. Способ по п. 2, отличающийся тем, что при проведении измерений напряженности электромагнитного поля при наличии, по крайней мере, одной коммуникации и при помощи блока датчиков, содержащего, по крайней мере, один двухэлементный датчик электромагнитного поля, содержащий два чувствительных элемента, оси измерения которых ортогонально размещены относительно друг друга в плоскости XY и прохождении оси X параллельно поверхности грунта, причем при наличии более одного двухэлементного датчика электромагнитного поля датчики в блоке разнесены на заранее фиксированные заданные расстояния друг от друга, при их параллельном переносе в новую точку измерения в блоке друг относительно друга, при этом измерение напряженности электромагнитного поля осуществляют в плоскости, перпендикулярной продольной оси коммуникации, при фиксации расстояний, на которые смещены датчики от положения в первой точке измерения, при этом напряженность электромагнитного поля определяется как сумма напряженности электромагнитного поля от каждой m-коммуникации, расположенных параллельно, в точке d-датчика и в n-точке измерений из выражений:



где E(2)nd - суммарная напряженность электромагнитного поля, измеренная двухэлементным d-датчиком в n-точке измерения; Е(2)1nd, E(2)2nd - напряженности электромагнитного поля, измеренные первым и вторым чувствительными элементами двухэлементного d-датчика электромагнитного поля в n-точке измерения соответственно; E(2)Xndm, E(2)Yndm - напряженности электромагнитного поля в месте расположения двухэлементного d-датчика электромагнитного поля в n-точке измерения, создаваемые m-коммуникацией вдоль оси X и оси Y соответственно; KXd, KYd - коэффициент преобразования прибора канала X и Y d-датчика соответственно; Im - ток в m-коммуникации; a0m - искомое расстояние до места прохождения m-коммуникации от первого датчика электромагнитного поля в первой точке измерения в плоскости, параллельной плоскости XZ, параллельной линии коммуникации; y0m - расстояние от первого датчика электромагнитного поля в первой точке измерения до места прохождения m-коммуникации по оси Y, ортогональной плоскости XZ; bnd - известное расстояние, на которое d-датчик электромагнитного поля смещен в n-точку измерения от первой точки измерения по оси Y; fnd - известное расстояние, на которое смещен d-датчик электромагнитного поля в n-точке измерения от первого датчика в первой точке в плоскости, параллельной плоскости XY, при этом на основе выражений для напряженности электромагнитного поля в точке d-датчика и в n-точке измерений определяют расстояние до места прохождения m-коммуникаций в плоскости, параллельной плоскости XZ, и глубину залегания на основе решения системы нелинейных уравнений с неизвестными - a0m, y0m, Im, в которой количество измерений равно или больше количества неизвестных, а количество данных, полученных с датчиков, больше или равно количеству неизвестных.
6. Способ по п. 2, отличающийся тем, что при проведении измерений напряженности электромагнитного поля при наличии, по крайней мере, одной коммуникации и при помощи блока датчиков, содержащего, по крайней мере, один двухэлементный датчик электромагнитного поля, содержащий два чувствительных элемента, оси измерения которых ортогонально размещены относительно друг друга в плоскости XZ и произвольно расположены в плоскости XZ, причем при наличии более одного двухэлементного датчика электромагнитного поля датчики в блоке разнесены на заранее фиксированные заданные расстояния друг от друга, при их параллельном переносе в новую точку измерения в блоке друг относительно друга, при этом измерение напряженности электромагнитного поля осуществляют в плоскости, параллельной продольной оси коммуникации, при фиксации расстояний, на которые смещены датчики от положения в первой точке измерения, при этом напряженность электромагнитного поля определяется в точке d-датчика и в n-точке измерений из выражений:
где E(2)nd - суммарная напряженность электромагнитного поля, измеренная двухэлементным d-датчиком в n-точке измерения; E(2)1nd, E(2)2nd - напряженности электромагнитного поля, измеренные первым и вторым чувствительными элементами двухэлементного d-датчика электромагнитного поля в n-точке измерения соответственно; E(2)XZndm - напряженность электромагнитного поля в месте расположения двухэлементного d-датчика электромагнитного поля в n-точке измерения, создаваемая m-коммуникацией в плоскости, параллельной плоскости XZ; KXZd - коэффициент преобразования прибора канала XZ d-датчика; Im - ток в m-коммуникации; a0m - искомое расстояние до места прохождения m-коммуникации от первого датчика электромагнитного поля в первой точке измерения в плоскости, параллельной плоскости XZ, параллельной линии коммуникации; y0m - расстояние от первого датчика электромагнитного поля в первой точке измерения до места прохождения m-коммуникации по оси Y, ортогональной плоскости XZ; bnd - известное расстояние, на которое d-датчик электромагнитного поля смещен в n-точку измерения от первой точки измерения по оси Y; fnd - известное расстояние, на которое смещен d-датчик электромагнитного поля в n-точке измерения от первого датчика в первой точке в плоскости, параллельной плоскости XY, при этом на основе выражений для напряженности электромагнитного поля в точке d-датчика и в n-точке измерений определяют расстояние до места прохождения m-коммуникаций в плоскости, параллельной плоскости XZ, и глубину залегания на основе решения системы нелинейных уравнений с неизвестными - a0m, y0m, Im, в которой количество измерений равно или больше количества неизвестных, а количество данных, полученных с датчиков, больше или равно количеству неизвестных.
7. Способ по п. 2, отличающийся тем, что при проведении измерений напряженности электромагнитного поля при наличии, по крайней мере, одной коммуникации и при помощи блока датчиков, содержащего, по крайней мере, один трехэлементный датчик электромагнитного поля, содержащий три чувствительных элемента, оси измерения которых ортогонально размещены относительно друг друга и произвольно расположены в пространстве, причем при наличии более одного трехэлементного датчика электромагнитного поля датчики в блоке разнесены на заранее фиксированные заданные расстояния друг от друга, при фиксации расстояний, на которые смещены датчики от положения в первой точке измерения, при этом напряженность электромагнитного поля над m-коммуникациями, расположенными параллельно, определяется как векторная сумма напряженности от каждой коммуникации в точке отдатчика и в n-точке измерения из выражений:


где E(3)nd - суммарная напряженность электромагнитного поля, измеренная трехэлементным d-датчиком в n-точке измерения; E(3)1nd, E(3)2nd, Е(3)3nd - напряженности электромагнитного поля, измеренные первым, вторым и третьим чувствительными элементами трехэлементного d-датчика в n-точке измерения соответственно; E(3)XZndm, E(3)Yndm - напряженности электромагнитного поля в месте расположения трехэлементного d-датчика электромагнитного поля в n-точке измерения, создаваемые m-коммуникацией в плоскости, параллельной плоскости XZ, и вдоль оси Y соответственно; KZXd, KYd - коэффициент преобразования прибора канала XZ и Y d-датчика соответственно; Im - ток в m-коммуникации; a0m - искомое расстояние до места прохождения m-коммуникации от первого датчика электромагнитного поля в первой точке измерения в плоскости, параллельной плоскости XZ, параллельной линии коммуникации; y0m - расстояние от первого датчика электромагнитного поля в первой точке измерения до места прохождения m-коммуникации по оси Y, ортогональной плоскости XZ; bnd - известное расстояние, на которое d-датчик электромагнитного поля смещен в n-точку измерения от первой точки измерения по оси Y; fnd - известное расстояние, на которое смещен d-датчик электромагнитного поля в n-точке измерения от первого датчика в первой точке в плоскости, параллельной плоскости XY, перпендикулярной линии прохождения коммуникации, при этом на основе выражений для напряженности электромагнитного поля в точке d-датчика и в n-точке измерений определяют расстояние до места прохождения m-коммуникаций в плоскости, параллельной плоскости XZ, и глубину залегания на основе решения системы нелинейных уравнений с неизвестными - a0m, y0m, Im, в которой количество измерений равно или больше количества неизвестных, а количество данных, полученных с датчиков, больше или равно количеству неизвестных.
8. Способ по п. 1, отличающийся тем, что глубину залегания и расстояние, по крайней мере, до одной коммуникации определяют на основе решения нелинейных уравнений методами наименьших квадратов и регрессионными методами в соответствии с выражениями для напряженности электромагнитного поля при помощи блока обработки устройства определения глубины залегания и расстояния до места прохождения подземной коммуникации, при этом глубину залегания коммуникации относительно уровня грунта определяют как разницу глубины залегания коммуникации относительно первого датчика в первой точке измерения и высоты над уровнем грунта первого датчика в первой точке измерения.
9. Способ по п. 2 или 8, отличающийся тем, что на основе изменения величины и знака измеренных значений электромагнитного поля определяют направление расположения коммуникации.
10. Устройство для определения места прохождения и глубины залегания подземных коммуникаций для выполнения способа по пп. 1-9, содержащее источник переменного тока, подключаемый, по крайней мере, к одной коммуникации, блок датчиков, содержащий, по крайней мере, один датчик электромагнитного поля, и корпус, в котором расположены, по крайней мере, один предусилитель для каждого датчика электромагнитного поля, по крайней мере, один АЦП, соединенный с соответствующим предусилителем, индикатор, блок обработки, блок питания, коммутатор реперных точек, блок памяти расстояния между реперными точками и блок памяти величины электромагнитного поля в реперных точках, при этом блок датчиков соединен с предусилителем, блок питания выполнен с возможностью подачи питания блоку датчиков, предусилителю, блоку обработки и индикатору, а блок обработки соединен с предусилителем через АЦП, индикатором, коммутатором реперных точек, блоком памяти расстояния между реперными точками и блоком памяти величины электромагнитного поля в реперных точках.
11. Устройство по п. 10, отличающееся тем, что в качестве датчиков электромагнитного поля применены одноэлементный, двухэлементный или трехэлементный датчики электромагнитного поля, измеряющие напряженность электромагнитного поля вдоль одной оси, в плоскости или в точке пространства соответственно, и содержащие чувствительные элементы.
12. Устройство по п. 10, отличающееся тем, что блок датчиков расположен вне или в корпусе.
13. Устройство по п. 10, отличающееся тем, что при наличии в блоке датчиков более одного датчика электромагнитного поля датчики в блоке разнесены на заранее фиксированные заданные расстояния друг от друга.
14. Устройство по п. 10, отличающееся тем, что в качестве коммутатора применен переключатель на панели прибора, при этом в память прибора введены фиксированные значения расстояний, соответствующие последовательности нажатия переключателя.
15. Устройство по п. 14, отличающееся тем, что переключатель выполнен с возможностью запуска начала измерения в первой точке, фиксации последующих точек измерения, остановки измерения и синхронизации измерений по времени при помощи таймера, а промежуточные расстояния между точками измерения вычисляются по предварительно занесенному в память алгоритму.
16. Устройство по п. 10, отличающееся тем, что дополнительно содержит измеритель расстояния, соединенный с блоком обработки.
17. Устройство по п. 16, отличающееся тем, что в качестве измерителя расстояния применена мерная планка, связанная с устройством и содержащая метки фиксируемых расстояний, занесенных в память прибора.
18. Устройство по п. 16, отличающееся тем, что в качестве измерителя расстояния применено мерное колесо.
19. Устройство по п. 16, отличающееся тем, что в качестве измерителя расстояния применен акселерометр при фиксации промежуточных точек по предварительно занесенному в память алгоритму.
20. Устройство по п. 16, отличающееся тем, что в качестве измерителя расстояния применена комбинация приборов, выполненных с возможностью дополнительного измерения углов поворота оси измерения датчиков электромагнитного поля и включающих в себя акселерометр, альтиметр, магнетометр, электронный гироскоп, соединенные с блоком обработки, при фиксации промежуточных точек по предварительно занесенному в память алгоритму.
21. Устройство по п. 16, отличающееся тем, что в качестве измерителя расстояния применена GPS система при фиксации промежуточных точек по предварительно занесенному в память алгоритму.
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО КАБЕЛЯ, РАСПОЛОЖЕННОГО В ЗЕМЛЕ, И ГЛУБИНЫ ЕГО ЗАЛЕГАНИЯ | 2007 |
|
RU2352963C1 |
| US 5093622, 03.03.1992 | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| US 4542344, 17.09.1985 | |||
| US 20080246481 А1, 09.10.2008 | |||
| US 7164270 B1, 16.01.2007. | |||

