ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к измерительной технике и может быть использовано для поиска места прохождения и глубины залегания коммуникации, в частности, кабельных линий, трубопроводов водоснабжения и теплосети, газо- и нефтепроводов, находящихся под землей.
УРОВЕНЬ ТЕХНИКИ
Известен способ определения места прохождения подземных коммуникаций, заключающийся в генерировании переменного испытательного сигнала, подачи его в искомую коммуникацию, измерение напряженности магнитного поля, излучаемого искомой коммуникацией за счет протекающего по ней генерируемого испытательного сигнала, с помощью одноэлементного линейного датчика электромагнитного поля в электрический сигнал. При этом датчик с помощью оператора перемещается поперек трассы и вначале угол наклона преобразователя равен нулю. По индикатору измерительного устройства определяют максимальное значение сигнала. Фиксируют место максимального значения, которое соответствует месту прохождения коммуникации. Затем датчик поворачивают под углом 45° к поверхности земли. С помощью оператора выполняют сканирование в направлении поперек трассы и фиксируют место нахождения первого минимума сигнала от места прохождения трассы. Измеряют расстояние от определенного места максимума сигнала до определенного места минимума сигнала, которое и будет соответствовать глубине залегания коммуникации (Шалыт Г.М. Определение места повреждения в электрических сетях. М. - 1982).
Данный метод достаточно прост, но имеет ряд ограничений: невозможно использовать данный метод при нахождении коммуникации под препятствием (стена, конструкция, стройматериалы, кусты, деревья и др.), так же невозможность его применения, в случае, если на поверхности на расстоянии, равном глубине залегания коммуникации находятся строительные или иные конструкции. Метод имеет большую погрешность определения глубины залегания коммуникации. Нет индикации глубины залегания.
Также известен способ определения глубины залегания элементов заземляющего устройства, включающий подключение источника переменного тока к заземляющему устройству, определение трассы прокладки заземляющего устройства, путем нахождения максимального сигнала и фиксации по нему места прохождения трассы, измерение напряженности электромагнитного поля на поверхности земли над элементом заземляющего устройства, перемещение датчика в точку пространства на известное расстояние от места прохождения трассы в плоскости параллельно уровню земли и на известную высоту строго вертикально, измеряют напряженность электромагнитного поля, глубину залегания определяют по заданной формуле (RU 2315337, опубл. 20.01.2008).
Данный способ не может быть использован, при нахождении препятствия над коммуникацией, недостатком способа так же является большая погрешность и отсутствие цифровой индикации глубины залегания коммуникации.
Кроме того, из уровня техники, известен способ определения места прохождения подземных коммуникаций, заключающийся в генерировании переменного испытательного сигнала, подачи его в искомую коммуникацию, измерение напряженности магнитного поля, излучаемого искомой коммуникацией за счет протекающего по ней генерируемого испытательного сигнала, с помощью двух датчиков магнитного поля, разнесенных по высоте на заданное расстояние. При этом датчики с помощью оператора перемещаются поперек трассы. По индикатору измерительного устройства определяют максимальное значение сигнала. Фиксируют место максимального значения, которое соответствует месту прохождения коммуникации. Глубину залегания коммуникации определяют расчетным путем, по значениям, полученным с каждого из двух преобразователей и величине расстояния между ними. (Грохман Ж., Джеймс C., Новлес Д. От А до Я локации и поиска повреждений подземных кабелей и труб, М. - 1999 ст. 167, прототип).
Недостатком данного метода является необходимость установки блока датчиков на оси, перпендикулярной оси коммуникации. Данный способ не может быть использован, при нахождении препятствия (нависающих конструкций) над коммуникацией. Наличие кустов, деревьев, строительных конструкций, мебели над и вблизи коммуникаций, препятствуют возможности определить место прохождения и глубину залегания коммуникаций данным методом.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей данного изобретения является разработка способа, обеспечивающего возможность определения расстояния до места прохождения коммуникации и глубины ее залегания при наличии, как препятствий над коммуникацией, так и при наличии нависающих конструкций, возможность определения расстояния до места прохождения и глубины коммуникации находясь на расстоянии от нее.
Техническим результатом группы изобретения является повышение точности и снижение трудоемкости измерений.
Указанный технический результат достигается за счет того, что способ определения глубины залегания и расстояния до места прохождения коммуникации с наведенным в ней переменным электромагнитным излучением, характеризующийся тем, что определяют примерную трассу прокладки коммуникации и место установки блока датчиков над коммуникацией, после чего:
а) устанавливают блок датчиков, содержащий, по крайней мере, три датчика электромагнитного поля в ранее определенном месте и определяют величины напряженности электромагнитного поля в месте установки блока датчиков на каждом датчике электромагнитного поля и высоту от уровня земли до оси первого датчика электромагнитного поля в блоке датчиков;
b) определяют величину угла под которым находится ось трассы по отношению к вертикальной оси блока датчиков в плоскости, перпендикулярной оси коммуникации;
c) определяют величину условной глубины залегания коммуникации;
d) определяют глубину залегания коммуникации и расстояние до нее на основе определенных величин на этапах a), b) и c).
В блоке датчиков, состоящем из трех датчиков электромагнитного поля, датчики расположены на фиксированном расстоянии друг от друга, при этом оси двух датчиков электромагнитного поля расположены параллельно друг другу и поверхности грунта, а ось третьего датчика электромагнитного поля, перпендикулярна осям первых двух датчиков и поверхности грунта, при этом оси параллельных датчиков электромагнитного поля расположены перпендикулярно или под углом от -20 до 20 градусов к оси коммуникации.
В блоке датчиков, состоящем из четырех датчиков электромагнитного поля, датчики расположены на фиксированном расстоянии друг от друга, при этом оси двух первых датчиков электромагнитного поля расположены параллельно друг другу и поверхности грунта, ось третьего датчика, перпендикулярна осям первых двух датчиков и поверхности грунта, а ось четвертого датчика перпендикулярна осям первых двух датчиков, перпендикулярна оси третьего датчика и параллельна поверхности грунта, при этом оси параллельных двух датчиков электромагнитного поля расположены перпендикулярно или под углом от -20 до 20 градусов к оси коммуникации.
В блоке датчиков, состоящем из шести датчиков электромагнитного поля, датчики электромагнитного поля скомпонованы в две группы по три датчика таким образом, что оси трех датчиков в каждой группе расположены взаимно перпендикулярно, а две группы датчиков расположены на фиксированном расстоянии друг от друга.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение будет более понятным из описания, не имеющего ограничительного характера и приводимого со ссылками на прилагаемые чертежи, на которых изображено:
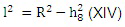
Фиг. 1 - Расположение блока датчиков над коммуникацией, содержащего три датчика электромагнитного поля.
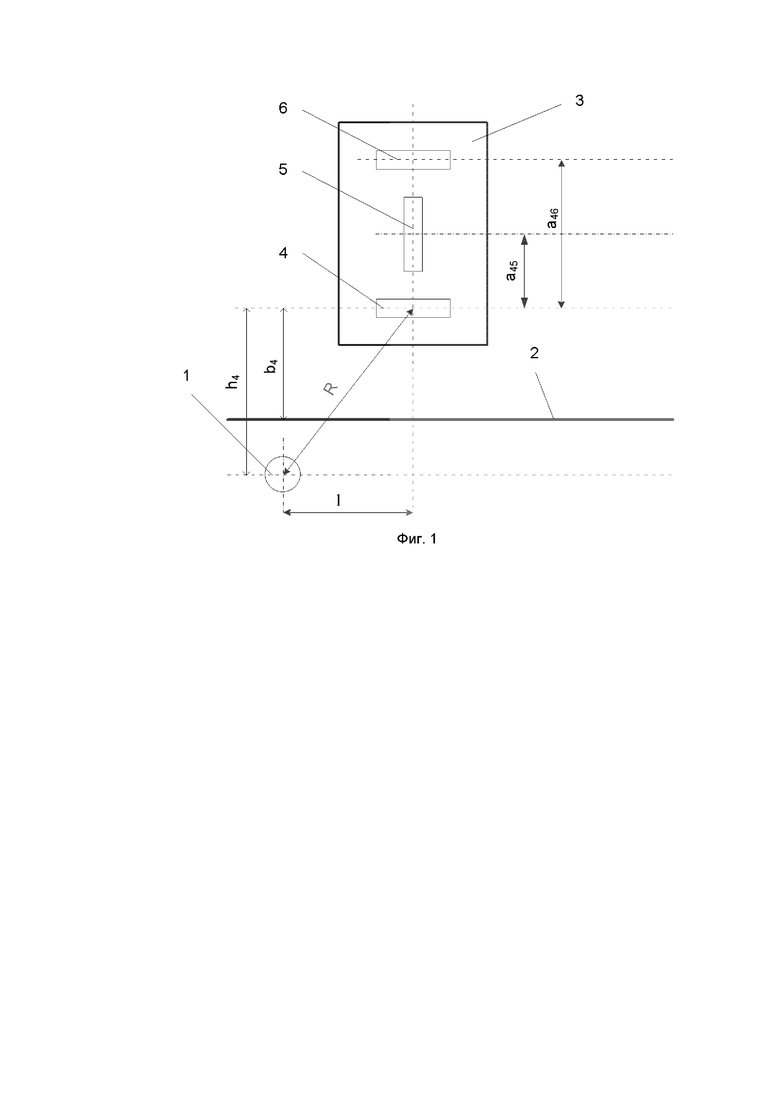
Фиг. 2 - Расположение блока датчиков над коммуникацией, содержащего четыре датчика электромагнитного поля.
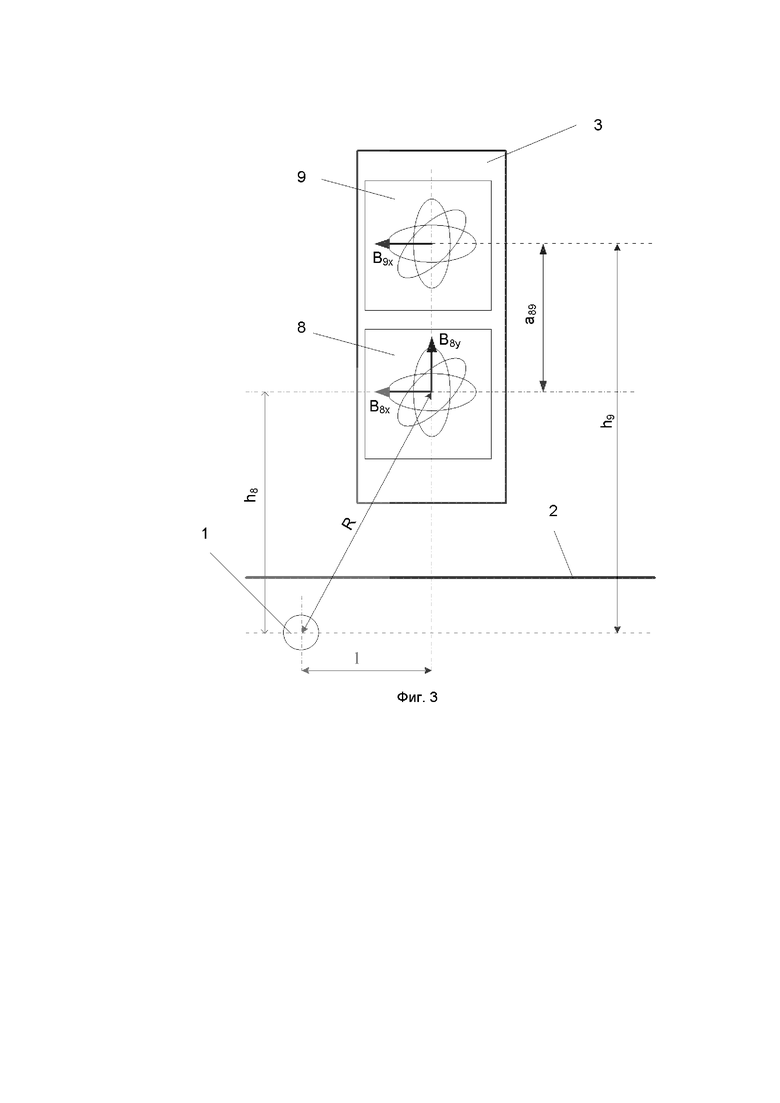
Фиг. 3 - Расположение блока датчиков над коммуникацией, содержащего шесть датчиков электромагнитного поля и направления векторов магнитной индукции.
1 - коммуникация; 2 - поверхность грунта; 3 - блок датчиков; 4 - первый датчик электромагнитного поля; 5 - второй датчик электромагнитного; 6 - третий датчик электромагнитного поля; 7 - четвертый датчик электромагнитного поля; 8 - первая группа датчиков электромагнитного поля; 9 - вторая группа датчиков электромагнитного поля.
Ниже приведена расшифровка буквенных обозначений, представленных в описании в выражениях для напряженности электромагнитного поля и на фигурах:
R - расстояние до коммуникации по прямой;
l - расстояние до коммуникации по горизонтали (расстояние до проекции коммуникации на линию, параллельную грунту);
b4 - расстояние от поверхности грунта до оси первого датчика электромагнитного поля в блоке датчиков;
hx - условная глубина залегания коммуникации, относительно первого датчика электромагнитного поля или первой группы датчиков электромагнитного поля;
h4 - глубина залегания коммуникации, относительно первого датчика электромагнитного поля;
h8 - глубина залегания коммуникации, относительно первой группы датчиков электромагнитного поля;
a45 - фиксированное расстояние между первым и вторым датчиками электромагнитного поля;
a46 - фиксированное расстояние между первым и третьим датчиками электромагнитного поля;
a89 - фиксированное расстояние между первой и второй группами датчиков электромагнитного поля;
Е4 - напряженность электромагнитного поля, измеренная первым датчиком электромагнитного поля;
E46 - средняя величина напряженности электромагнитного поля в точке, проходящей через центр второго датчика электромагнитного поля и параллельной Е4 и Е6;
Е5 - напряженность электромагнитного поля, измеренная вторым датчиком электромагнитного поля;
Е6 - напряженность электромагнитного поля, измеренная третьим датчиком электромагнитного поля;
Е7 - напряженность электромагнитного поля, измеренная четвертым датчиком электромагнитного поля;
Е8 - суммарная напряженность электромагнитного поля, измеренная первой группой датчиков электромагнитного поля;
Е9 - суммарная напряженность электромагнитного поля, измеренная второй группой датчиков электромагнитного поля;
B8y - проекция вектора напряженности электромагнитного поля (Е8) на вертикальную ось;
В8х - проекция вектора напряженности электромагнитного поля (Е8) на горизонтальную ось;
В9х - проекция вектора напряженности электромагнитного поля (Е9) на горизонтальную ось;
α - угол, под которым находится ось трассы по отношению к вертикальной оси блока (3) датчиков в плоскости, перпендикулярной оси коммуникации (далее угол отклонения);
n - количество аппроксимационных коэффициентов в выражении для α ;
m - количество аппроксимационных коэффициентов в выражении для y;
y - аппроксимационная формула для hx;
k, c, d - аппроксимационные коэффициенты.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Способ определения глубины залегания и расстояния до места прохождения коммуникации при наличии в блоке (3) датчиков трех одноэлементных датчиков (4, 5, 6) электромагнитного поля осуществляют следующим образом. В случае, когда на коммуникации нет наведенного электромагнитного сигнала (кабель, подключенный к электросети, трубопровод с наведенным сигналом от проходящего рядом электрического кабеля), источник переменного тока подключают к коммуникации (1), генерируют переменный испытательный сигнал и подают его в коммуникацию (1), т.е. в коммуникации (1) образуется наведенное переменное электромагнитное излучение.
Затем определяют примерную трассу прокладки коммуникации (1) и место установки прибора с блоком (3) датчиков над коммуникацией (место положения первой точки измерения). Примерную трассу прокладки до коммуникации (1) определяют на основании имеющихся топографических схем или при использовании простейших методов трассировки, например, метода максимума при помощи одноэлементного датчика (Шалыт Г.М. Определение места повреждения в электрических сетях. М. - 1982). Место положения первой точки измерения определяют путем проведения начальных измерений и получения достоверного сигнала на датчиках.
После чего, устанавливают прибор с блоком (3) датчиков, содержащий три датчика (4, 5, 6) электромагнитного поля в ранее определенном месте и определяют величины напряженности (Е4, Е5, Е6) электромагнитного поля в месте установки блока (3) датчиков на каждом датчике (4, 5, 6) электромагнитного поля и расстояние b4 от поверхности грунта (2) до оси первого датчика (4) электромагнитного поля в блоке (3) датчиков. Для определения величин напряженности (Е4, Е5, Е6) электромагнитного поля, наведенное в коммуникации (1) электромагнитное излучение измеряется чувствительным элементом каждого из трех датчиков (4, 5, 6) электромагнитного поля в блоке (3) датчиков, при этом оси датчиков (4, 5, 6) электромагнитного поля расположены на фиксированном расстоянии друг от друга, причем оси двух датчиков (4, 6) электромагнитного поля расположены параллельно друг другу и поверхности грунта, а ось третьего датчика (5) электромагнитного поля, перпендикулярна осям первых двух датчиков и поверхности грунта, при этом оси параллельных датчиков электромагнитного поля расположены перпендикулярно или под углом от -20 до 20 градусов к оси коммуникации (1). Сигнал напряженности электромагнитного поля с чувствительных элементов датчиков (4, 5, 6) электромагнитного поля поступает на предусилитель где усиливается, а затем на АЦП и поступает в блок обработки. Результаты вычислений условной глубины, угла, рассчитанной глубины залегания коммуникации и расстояния до коммуникации по горизонтали выводятся на индикатор. При этом для каждого датчика (4, 5, 6) электромагнитного поля предусмотрен свой предусилитель и АЦП, т.е. первый датчик (4) электромагнитного поля связан с одним предусилителем и АЦП, а второй датчик (5) электромагнитного поля связан с другим предусилителем и АЦП, а третий датчик (6) электромагнитного поля связан с третьим предусилителем и АЦП. Расстояние b4 от первого датчика (4) до уровня грунта (2) измеряется независимо, с помощью измерительного инструмента, или автоматический измеритель расстояния фиксирует расстояние между датчиками и расстояние b4 от поверхности грунта (2) до оси первого (4) датчика электромагнитного поля и передает данные в блок обработки. Данное расстояние в последующем вычитается из рассчитанной величины залегания коммуникации  , для определения глубины залегания коммуникации относительно уровня грунта (2).
, для определения глубины залегания коммуникации относительно уровня грунта (2).
Затем, в блоке обработки, определяют величину условной глубины залегания коммуникации (1), на основе определенных величин напряженности (Е4, Е6) электромагнитного поля на двух датчиках (4, 6). При нахождении блока (3) датчиков над центром коммуникации (1) условная глубины залегания коммуникации (1) совпадает с истинной глубиной залегания коммуникации (1). Условная глубины залегания коммуникации (1) больше истинной глубины залегания коммуникации (1) и определяется из выражения:
После этого, в блоке обработке, определяют величину угла отклонения, на основе определенных величин напряженности (Е4, Е5, Е6) электромагнитного поля на трех датчиках, включая датчик (5) и два предыдущие (4,6), исходя из выражений:

При этом перед вычислением истиной глубины залегания коммуникации (1) проводят калибровку прибора на стендовом оборудовании и вносят тестовые значения зависимости условной глубины от угла отклонения, и истинной глубины. На стадии градуировки приборов в память прибора заносят зависимости глубины залегания коммуникации от рассчитанной условной глубины и угла отклонения или соотношения  . Данные могут быть занесены как в табличном виде, так и в виде аппроксимационных формул. Например, в виде:
. Данные могут быть занесены как в табличном виде, так и в виде аппроксимационных формул. Например, в виде:

или

Аппроксимационные коэффициенты рассчитывают методом наименьших квадратов на основе фактических измерений величин истинной глубины, электромагнитной индукции на датчиках и расчетных значений условной глубины и угла α.
Внесение данных об угле отклонения и условной глубины необходимо для увеличения точности расчета глубины залегания коммуникации, т.к. отсутствие при расчетах глубины залегания коммуникации h4 указанных данных проводит к значительным погрешностям по ее определению при нахождении прибора вдали от оси коммуникации. Проведенные экспериментальные измерения позволили уменьшить погрешность определения глубины залегания на расстоянии от оси коммуникации до 10%.
На основе известной величины угла отклонения можно вычислить другие углы: угол отклонения суммарного вектора электромагнитной индукции от вертикальной оси блока датчиков или от горизонтальной плоскости, угол отклонения оси трассы от нормали к вертикальной оси блока датчиков и др. В связи с однозначной связью между величинами данных углов с углом отклонения в каждой точке, в качестве основного выбран угол отклонения. При использовании других значений углов, они могут быть пересчитаны через значения угла отклонения.
Далее прибор перемещают в новую точку измерения и осуществляют новое измерение величин напряженности (Е4, Е5, Е6) электромагнитного поля, с последующим определением величины угла отклонения и величины условной глубины залегания коммуникации (1) и определения на их основе истинной глубины залегания коммуникации. Определение указанных выше величин осуществляют не менее трех раз.
Для каждой точки измерения определяют глубину залегания коммуникации (1) и расстояние до нее на основе определенных величин на этапах a), b) и c) и табличных данных или выражения (IV). Глубину залегания h4 от оси первого датчика (4) электромагнитного поля определяют на основе трех измерений в разных точках.
Расстояние R до коммуникации (1) определяют исходя из выражения:
Расстояние l до коммуникации по горизонтали определяется из выражения:
Способ определения глубины залегания и расстояния до места прохождения коммуникации при наличии в блоке (3) датчиков четырех одноэлементных датчиков (4, 5, 6, 7) электромагнитного поля осуществляют следующим образом. Сначала источник переменного тока подключают к коммуникации (1), генерируют переменный испытательный сигнал и подают его в коммуникацию (1), т.е. в коммуникации (1) образуется наведенное переменное электромагнитное излучение.
Использование четвертого датчика (7) электромагнитного поля позволяет определить ориентировочно направление, близкое к нормали к оси коммуникации и примерную трассу прокладки коммуникации. Направление на коммуникацию определяется путем векторного суммирования векторов электромагнитной индукции, определенных с помощью датчика (7) и датчика (6) находящихся в плоскости, параллельной поверхности земли и ортогональных друг другу. Направление суммарного вектора будет указывать линию, перпендикулярную оси трассы. Что сокращает время выполнения работ и значительно повышает точность измерений. Место положения первой точки измерения определяют путем проведения начальных измерений и получения достоверного электромагнитного сигнала на датчиках.
После чего, устанавливают прибор с блоком (3) датчиков, содержащий четыре датчика (4, 5, 6, 7) электромагнитного поля в ранее определенном месте и определяют величины напряженности (Е4, Е5, Е6, Е7) электромагнитного поля в месте установки блока (3) датчиков на каждом датчике (4, 5, 6, 7) электромагнитного поля и высоту b4 от поверхности грунта (2) до оси первого датчика (4) электромагнитного поля в блоке (3) датчиков. Для определения величин напряженности (Е4, Е5, Е6, Е7) электромагнитного поля, наведенное в коммуникации (1) электромагнитное излучение измеряется чувствительным элементом каждого из четырех датчиков (4, 5, 6, 7) электромагнитного поля в блоке (3) датчиков, при этом оси четырех датчиков (4, 5, 6, 7) электромагнитного поля, расположенных на фиксированном расстоянии друг от друга, причем оси двух датчиков (4, 6) электромагнитного поля расположены параллельно друг другу и поверхности грунта, ось третьего датчика (5), перпендикулярна осям первых двух датчиков и поверхности грунта, а ось четвертого датчика (7) перпендикулярна осям первых двух датчиков, перпендикулярна оси третьего датчика и параллельна поверхности грунта, при этом оси параллельных двух датчиков электромагнитного поля расположены перпендикулярно или под углом от -20 до 20 градусов к оси коммуникации (1).
Определение глубины залегания и расстояния до коммуникации осуществляется аналогично, как и с использованием трех датчиков (4, 5, 6), датчик 7 служит для установления блока датчиков перпендикулярно оси коммуникации, без предварительной ее трассировки.
Способ определения глубины залегания и расстояния до места прохождения коммуникации при наличии в блоке (3) датчиков шести одноэлементных датчиков электромагнитного поля, причем датчики электромагнитного поля скомпонованы в две группы (8, 9) по три датчика таким образом, что оси трех датчиков в каждой группе расположены взаимно перпендикулярно, а две группы датчиков расположены на фиксированном расстоянии друг от друга, осуществляют следующим образом. Сначала источник переменного тока подключают к коммуникации (1), генерируют переменный испытательный сигнал и подают его в коммуникацию (1), т.е. в коммуникации (1) образуется наведенное переменное электромагнитное излучение.
Затем определяют примерную трассу прокладки коммуникации (1) и место установки прибора с блоком (3) датчиков над коммуникацией (место положения первой точки измерения). Примерную трассу прокладки до коммуникации (1) определяют на основании проекции вектора электромагнитной индукции на плоскость, параллельную плоскости грунта, полученного путем векторного сложения трех измеренных значение векторов электромагнитной индукции на каждом из трех датчиков в первой (8) или второй (9) группе датчиков. Место положения первой точки измерения определяют путем проведения начальных измерений и получения достоверного электромагнитного сигнала на датчиках.
После чего, устанавливают прибор с блоком (3) датчиков, содержащий шесть датчиков электромагнитного поля, скомпонованные в две группы (8, 9) по три датчика, в ранее определенном месте и определяют суммарные векторные величины напряженности (Е8, Е9) электромагнитного поля в месте установки блока (3) датчиков на каждой группе (8, 9) датчиков и высоту b8 от поверхности грунта (2) до оси первой группы (8) датчиков электромагнитного поля в блоке (3) датчиков. Для определения величин напряженности (Е8, Е9) электромагнитного поля, наведенное в коммуникации (1) электромагнитное излучение измеряется чувствительным элементом каждого из шести датчиков электромагнитного поля в каждой группе (8, 9) датчиков блока (3) датчиков, при этом оси трех датчиков в каждой группе расположены взаимно перпендикулярно, а две группы датчиков расположены на фиксированном расстоянии друг от друга. Сигнал напряженности электромагнитного поля с чувствительных элементов каждого из шести датчиков электромагнитного поля поступает на свой предусилитель где усиливается, а затем на свой АЦП и поступает в блок обработки. При этом для каждого датчика в группе датчиков (8, 9) электромагнитного поля предусмотрен свой предусилитель и АЦП. Расстояние от первой группы датчиков (8) электромагнитного поля до уровня грунта (2) измеряется независимо, с помощью измерительного инструмента, или автоматический измеритель расстояния фиксирует расстояние между датчиками и высоту от поверхности грунта (2) до оси первой группы датчиков (8) электромагнитного поля и передает данные в блок обработки. Данное расстояние в последующем вычитается из рассчитанной величины залегания коммуникации h8, для определения глубины залегания коммуникации относительно уровня грунта (2).
Наличие в каждом блоке трех датчиков позволяет определить амплитуду и пространственное направление векторов электромагнитной индукции в двух точках, разнесенных на заданное расстояние. Это, в свою очередь, позволяет определить проекции этих векторов на оси в данных точках, и задает угол, под которым находится ось трассы по отношению к вертикальной оси блока (3) датчиков в плоскости, перпендикулярной оси коммуникации - угол отклонения. Повышение точности в данном методе, по сравнению с вышеприведенными методами достигается за счет того, что не требуется проводить пересчет значений, для определения угла отклонения, (см. формулу (III)), т. к. угол отклонения определяется по углу наклона суммарного вектора относительно к вертикальной оси блока (3) датчиков в плоскости, перпендикулярной оси коммуникации в точке нахождения группы датчиков (8).
Затем в блоке обработке определяют величину угла отклонения, на основе определенных величин проекций напряженности электромагнитного поля (Е8,) на вертикальную B8y и горизонтальную B8x оси, причем горизонтальная ось направлена по нормали к коммуникации исходя из выражений:

После чего в блоке обработке определяют величину условной глубины залегания коммуникации (1), которая соответствует глубине залегания коммуникации (1) при нахождении блока (3) датчиков не над центром коммуникации (1). При нахождении блока (3) датчиков над центром коммуникации (1) условная глубины залегания коммуникации (1) совпадает с истинной глубиной залегания коммуникации (1). Условная глубины залегания коммуникации (1) больше истинной глубины залегания коммуникации (1) и определяется из выражения:
При этом перед вычислением истиной глубины залегания коммуникации (1) проводят калибровку прибора на стендовом оборудовании и вносят тестовые значения зависимости условной глубины от угла отклонения, и истинной глубины. На стадии градуировки приборов в память прибора заносят зависимости глубины залегания коммуникации от рассчитанной условной глубины и угла отклонения или соотношения  Данные могут быть занесены как в табличном виде, так и в виде аппроксимационных формул. Например, в виде:
Данные могут быть занесены как в табличном виде, так и в виде аппроксимационных формул. Например, в виде:

или

Далее прибор перемещают в новую точку измерения и осуществляют новое измерение величин напряженности (Е8, Е9) электромагнитного поля, с последующим определением величины угла отклонения и величины условной глубины залегания коммуникации (1). Перемещение прибора в новую точку и измерение величин напряженности и последующее определение указанных выше величин осуществляют не менее трех раз.
Для каждой точки измерения определяют глубину залегания коммуникации (1) и расстояние до нее на основе определенных величин на этапах a), b) и c) и табличных данных или выражения (XI). Глубину залегания h4 от оси первой группы датчиков (8) электромагнитного поля определяют на основе трех измерений в разных точках.
Расстояние R до коммуникации (1) определяют исходя из выражения:
Расстояние l до коммуникации по горизонтали определяется из выражения:
Изобретение было раскрыто выше со ссылкой на конкретный вариант его осуществления. Для специалистов могут быть очевидны и иные варианты осуществления изобретения, не меняющие его сущности, как она раскрыта в настоящем описании. Соответственно, изобретение следует считать ограниченным по объему только нижеследующей формулой изобретения.
Изобретение относится к измерительной технике и может быть использовано для поиска места прохождения и глубины залегания коммуникации, в частности кабельных линий, трубопроводов водоснабжения и теплосети, газо- и нефтепроводов, находящихся под землей. Технический эффект, заключающийся в повышении точности и снижении трудоемкости измерений, достигается за счёт того, что определяют примерную трассу прокладки коммуникации и место установки блока датчиков над коммуникацией, после чего: устанавливают блок датчиков, содержащий, по крайней мере, три датчика электромагнитного поля в ранее определенном месте, и определяют величины напряженности электромагнитного поля в месте установки блока датчиков на каждом датчике электромагнитного поля и высоту от уровня земли до оси первого датчика электромагнитного поля в блоке датчиков; определяют величину угла, под которым находится ось трассы по отношению к вертикальной оси блока датчиков в плоскости, перпендикулярной оси коммуникации; определяют величину условной глубины залегания коммуникации; определяют глубину залегания коммуникации и расстояние до нее на основе определенных величин: напряженности электромагнитного поля, условной глубины залегания коммуникации и угла, под которым находится ось трассы по отношению к вертикальной оси блока датчиков в плоскости, перпендикулярной оси коммуникации. 3 з.п. ф-лы, 3 ил.
1. Способ определения глубины залегания и расстояния до места прохождения коммуникации с наведенным в ней переменным электромагнитным излучением, характеризующийся тем, что определяют примерную трассу прокладки коммуникации и место установки блока датчиков над коммуникацией, после чего:
а) устанавливают блок датчиков, содержащий, по крайней мере, три датчика электромагнитного поля в ранее определенном месте и определяют величины напряженности электромагнитного поля в месте установки блока датчиков на каждом датчике электромагнитного поля и высоту от уровня земли до оси первого датчика электромагнитного поля в блоке датчиков;
b) определяют величину угла, под которым находится ось трассы по отношению к вертикальной оси блока датчиков в плоскости, перпендикулярной оси коммуникации;
c) определяют величину условной глубины залегания коммуникации;
d) определяют глубину залегания коммуникации и расстояние до нее по горизонтали на основе определенных величин на этапах a), b) и c).
2. Способ по п. 1, отличающийся тем, что в блоке датчиков, состоящем из трех датчиков электромагнитного поля, датчики расположены на фиксированном расстоянии друг от друга, при этом оси двух датчиков электромагнитного поля расположены параллельно друг другу и поверхности грунта, а ось третьего датчика электромагнитного поля перпендикулярна осям первых двух датчиков и поверхности грунта, при этом оси параллельных датчиков электромагнитного поля расположены перпендикулярно или под углом от -20 до 20 градусов к оси коммуникации.
3. Способ по п. 1, отличающийся тем, что в блоке датчиков, состоящем из четырех датчиков электромагнитного поля, датчики расположены на фиксированном расстоянии друг от друга, при этом оси двух датчиков электромагнитного поля расположены параллельно друг другу и поверхности грунта, ось третьего датчика перпендикулярна осям первых двух датчиков и поверхности грунта, а ось четвертого датчика перпендикулярна осям первых двух датчиков, перпендикулярна оси третьего датчика и параллельна поверхности грунта, при этом оси параллельных первых двух датчиков электромагнитного поля расположены перпендикулярно или под углом от -20 до 20 градусов к оси коммуникации.
4. Способ по п. 1, отличающийся тем, что в блоке датчиков, состоящем из шести датчиков электромагнитного поля, датчики электромагнитного поля скомпонованы в две группы по три датчика таким образом, что оси трех датчиков в каждой группе расположены взаимно перпендикулярно, а две группы датчиков расположены на фиксированном расстоянии друг от друга.
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ЗАЛЕГАНИЯ И РАССТОЯНИЯ ДО МЕСТА ПРОХОЖДЕНИЯ КОММУНИКАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2635402C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО КАБЕЛЯ, РАСПОЛОЖЕННОГО В ЗЕМЛЕ, И ГЛУБИНЫ ЕГО ЗАЛЕГАНИЯ | 2007 |
|
RU2352963C1 |
| СИСТЕМА БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОКА В ПОДЗЕМНЫХ ТРУБОПРОВОДАХ И ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ИХ ЗАЛЕГАНИЯ | 2003 |
|
RU2246742C1 |
| US 20180172866 A1, 21.06.2018 | |||
| US 7498797 B1, 03.03.2009. | |||

