ОБЛАСТЬ ТЕХНИКИ
Группа изобретений относится к способу и устройству определения места прохождения и глубины залегания коммуникаций: силовых и связных кабелей, трубопроводов, например, нефтепроводов, теплотрасс и др.
УРОВЕНЬ ТЕХНИКИ
Известен способ определения места прохождения подземных коммуникаций, заключающийся в генерировании переменного испытательного сигнала, подачи его в искомую коммуникацию, измерение напряженности магнитного поля, излучаемого искомой коммуникацией за счет протекающего по ней генерируемого испытательного сигнала, с помощью одноэлементного линейного датчика магнитного поля в электрический сигнал. При этом датчик с помощью оператора перемещается поперек трассы и вначале угол наклона преобразователя равен нулю. По индикатору измерительного устройства определяют максимальное значение сигнала. Фиксируют место максимального значения, которое соответствует месту прохождения коммуникации. Затем датчик поворачивают под углом 45° к поверхности земли. С помощью оператора выполняют сканирование в направлении поперек трассы и фиксируют место нахождения первого минимума сигнала от места прохождения трассы. Измеряют расстояние от определенного места максимума сигнала до определенного места минимума сигнала, которое и будет соответствовать глубине залегания коммуникации (Шалыт Г.М. Определение места повреждения в электрических сетях. М. - 1982).
Данный метод достаточно прост, но имеет ряд ограничений: невозможно использовать данный метод при определении места прохождения коммуникации под препятствием (стена, конструкция, стройматериалы, кусты, деревья и др.), также невозможность его применения, в случае, если на поверхности на расстоянии, равном глубине залегания коммуникации находятся строительные или иные конструкции. Кроме этого данный метод не применим при искажении магнитного поля за счет проходящих рядом других коммуникаций. Метод имеет большую погрешность определения глубины залегания коммуникации.
Известен способ определения места прохождения подземных коммуникаций, заключающийся в генерировании переменного испытательного сигнала, подачи его в искомую коммуникацию, измерение напряженности магнитного поля, излучаемого искомой коммуникацией за счет протекающего по ней генерируемого испытательного сигнала, с помощью двух датчиков магнитного поля в электрический сигнал, разнесенных по высоте на заданное расстояние. При этом датчики с помощью оператора перемещаются поперек трассы. По индикатору измерительного устройства определяют максимальное значение сигнала. Фиксируют место максимального значения, которое соответствует месту прохождения коммуникации. Глубину залегания коммуникации определяют расчетным путем, по значениям, полученным с каждого из двух преобразователей и величине расстояния между ними. (Грохман Ж., Джеймс С., Новлес Д. От А до Я локации и поиска повреждений подземных кабелей и труб, М. - 1999 ст. 167).
Недостатком данного метода является необходимость фиксировать прибор в строго заданном направлении относительно линии прохождения коммуникации, измерение глубины только при нахождении прибора строго над коммуникацией, которая определяется данным способом с большой погрешностью, и соответственно ориентированного.
Известен способ определения места прохождения подземных коммуникаций, выбранный в качестве прототипа (US 7332901 В2, опубл. 19.02.2008), заключающийся в генерировании переменного испытательного сигнала, подачи его в искомую коммуникацию, измерение напряженности магнитного поля, излучаемого искомой коммуникацией за счет протекающего по ней генерируемого испытательного сигнала, с помощью датчиков электромагнитного поля в электрический сигнал, разнесенных в пространстве на заданное расстояние. При этом датчики с помощью оператора перемещаются поперек трассы. По индикатору измерительного устройства определяют направление на коммуникацию. Фиксируют место максимального значения, которое соответствует месту прохождения коммуникации. Устройство содержит по крайней мере, два антенных блока, каждый из которых состоит по меньшей мере из трех взаимно ортогональных катушек; множество опор, каждая опора соединена с одним из антенных узлов; корпуса соединенного с поворотным устройством; средство обработки, по меньшей мере, частично установленного в корпусе для приема сигналов от катушек, вызванных электромагнитным излучением от заглубленного объекта, определения местоположения заглубленного объекта и предоставления указания местоположения.
Данный способ и устройство достаточно громоздки, требуют большой вычислительной мощности, не рассчитывают глубину на расстоянии от коммуникации, что снижает достоверность и точность определения коммуникаций, находящихся под препятствием, например, под строительными конструкциями.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей заявленной группы изобретений является разработка способа и устройства определения места прохождения и глубины залегания коммуникаций.
Техническим результатом заявленной группы изобретений является повышение точности и достоверности определения места прохождения и глубины залегания коммуникаций, уменьшение вычислительных мощностей, сокращение габаритов.
Указанный технический результат достигается за счет того, что способ определения места прохождения и глубины залегания коммуникации включает следующие этапы:
а) возбуждение электромагнитного излучения в коммуникации;
б) установка над предполагаемым местом прохождения коммуникации, по меньшей мере, двух блоков датчиков электромагнитного поля, один из которых выполнен в виде, по меньшей мере, двух антенн, а второй в виде, по меньшей мере, одной антенны;
в) измерение ориентации вектора электромагнитной индукции и уровня напряженности электромагнитного поля;
г) вращение, по меньшей мере, двух блоков датчиков вокруг вертикальной оси и определение максимального уровня напряженности электромагнитного поля и направления на коммуникацию;
д) перемещение, по меньшей мере, двух блоков датчиков электромагнитного поля над коммуникацией в зоне ее предполагаемого прохождения в новую точку измерения;
е) измерение максимального уровня напряженности электромагнитного поля и ориентации вектора электромагнитной индукции в новой точке измерения;
ж) повторение этапов перемещения, по меньшей мере, двух блоков датчиков электромагнитного поля над коммуникацией в зоне ее предполагаемого прохождения и измерения максимального уровня напряженности электромагнитного поля и ориентации вектора электромагнитной индукции не менее трех раз;
з) определение расстояния до коммуникации и глубины ее залегания по величине уровня напряженности электромагнитного поля и направлению вектора электромагнитной индукции.
Ось антенны второго блока датчиков перпендикулярна линии, соединяющей первый и второй блоки датчиков, и находится в плоскости, проходящей через обе оси антенн первого блока датчиков, выполненного в виде, по меньшей мере, двух антенн, и которая проходит через ось прибора.
Над предполагаемым местом прохождения коммуникации устанавливают три блока датчиков, при этом третий блок датчиков, выполнен в виде как минимум одиночной антенны, находящейся на фиксированном расстоянии от первого и второго блоков датчиков, на линии, соединяющей первый и второй блоки датчиков.
Устройство для определения места прохождения и глубины залегания коммуникации содержит, по меньшей мере, два блока датчиков электромагнитного поля, один из которых выполнен в виде, по меньшей мере, двух антенн, а второй, по меньшей мере, в виде одной антенны, причем антенны блоков датчиков электромагнитного поля соединены с блоками предусилителей, которые соединены с аналого-цифровыми преобразователями, соединенными с микропроцессором, с которым в свою очередь соединены блок памяти и индикатор.
Ось антенны второго блока датчиков перпендикулярна линии, соединяющей первый и второй блоки датчиков, и находится в плоскости, проходящей через обе оси антенн первого блока датчиков, выполненного в виде, по меньшей мере, двух антенн, и которая проходит через ось прибора.
Устройство содержит два блока датчиков электромагнитного поля, каждый из которых выполнен в виде двух антенн, при этом плоскость, проходящая через обе оси антенн первого блока датчиков перпендикулярна плоскости, проходящей через обе оси антенн второго блока датчиков.
Устройство содержит два блока датчиков электромагнитного поля, при этом первый блок датчиков содержит три взаимно ортогональные антенны, а второй две взаимно ортогональные антенны, и плоскость, проходящая через обе оси антенн второго блока датчиков параллельна оси, или находится под углом к оси, соединяющей центры блоков датчиков.
Устройство содержит три блока датчиков, при этом первый блок датчиков электромагнитного поля содержит две антенны, и плоскость, проходящая через обе оси антенн первого блока датчиков ортогональна оси прибора, а второй и третий блок датчиков содержат по одной антенне, расположенных на разных фиксированных расстояниях от первого блока, и ось антенны второго блока датчиков проходит через ось прибора, а ось антенны третьего блока датчиков ортогональна оси прибора.
Устройство содержит три блока датчиков, при этом первый и третий блоки датчиков электромагнитного поля содержат две антенны, а второй блок датчиков содержит одну антенну, расположенную на фиксированном расстоянии от первого блока, и ось которой проходит вдоль оси прибора, при этом плоскость, проходящая через обе оси антенн первого блока датчиков ортогональна плоскости, проходящей через обе оси антенн третьего блока датчиков и параллельна оси прибора.
Устройство содержит три блока датчиков, при этом первый блок датчиков электромагнитного поля содержит три антенны, а второй и третий блок датчиков содержат по одной антенне, расположенных на разных фиксированных расстояниях от первого блока, и ось антенны второго блока датчиков проходит через ось прибора, а ось антенны третьего блока датчиков ортогональна оси прибора.
Устройство содержит три блока датчиков, при этом первый блок датчиков электромагнитного поля содержит три антенны, второй блок датчиков содержит одинарную антенну, ось которой проходит вдоль оси прибора, а третий блок датчиков содержит две антенны, а плоскость, проходящая через обе оси антенн третьего блока датчиков, ортогональна оси прибора.
Устройство содержит три блока датчиков электромагнитного поля, каждый из которых выполнен в виде двух антенн, при этом плоскость, проходящая через обе оси антенн одного из блоков датчиков перпендикулярна плоскостям, проходящим через обе оси антенн двух оставшихся блоков датчиков.
Устройство содержит три блока датчиков электромагнитного поля, при этом первый блок датчиков содержит три взаимно ортогональные антенны, а второй и третий по две взаимно ортогональные антенны.
Устройство содержит четыре блока датчиков электромагнитного поля, каждый из которых выполнен в виде двух антенн.
Устройство содержит четыре блока датчиков электромагнитного поля, первый блок из которых содержит две антенны, второй и четвертый блоки датчиков содержат по одной антенне, расположенных на разных фиксированных расстояниях от первого блока, и оси которых параллельны оси прибора, а третий блок датчиков содержит две антенны, и плоскость, проходящая через обе оси антенн третьего блока датчиков, перпендикулярна оси прибора.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение будет более понятным из описания, не имеющего ограничительного характера и приводимого со ссылками на прилагаемые чертежи, на которых изображено:
Фиг. 1 - Расположение элементов устройства относительно коммуникации;
Фиг. 2 - Блок датчиков электромагнитного поля, содержащий две антенны;
Фиг. 3 - Определение суммарного вектора электромагнитной индукции от двух датчиков;
Фиг. 4 - Положение плоскости блока датчиков;
Фиг. 5 - Система датчиков электромагнитного поля, состоящая из двух блоков датчиков электромагнитного поля;
Фиг. 6 - Система датчиков электромагнитного поля, состоящая из двух блоков датчиков электромагнитного поля;
Фиг. 7 - Система датчиков электромагнитного поля, состоящая из трех блоков датчиков электромагнитного поля;
Фиг. 8 - Система датчиков электромагнитного поля, состоящая из трех блоков датчиков электромагнитного поля;
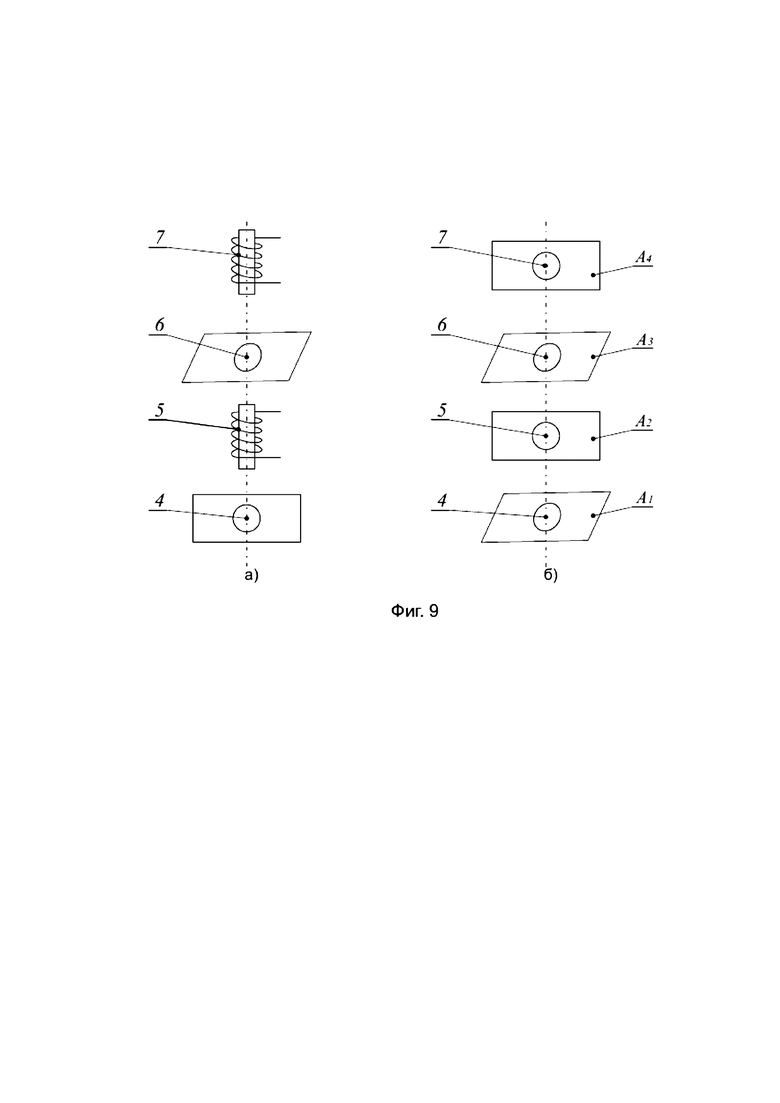
Фиг. 9 - Система датчиков электромагнитного поля, состоящая из четырех блоков датчиков электромагнитного поля;
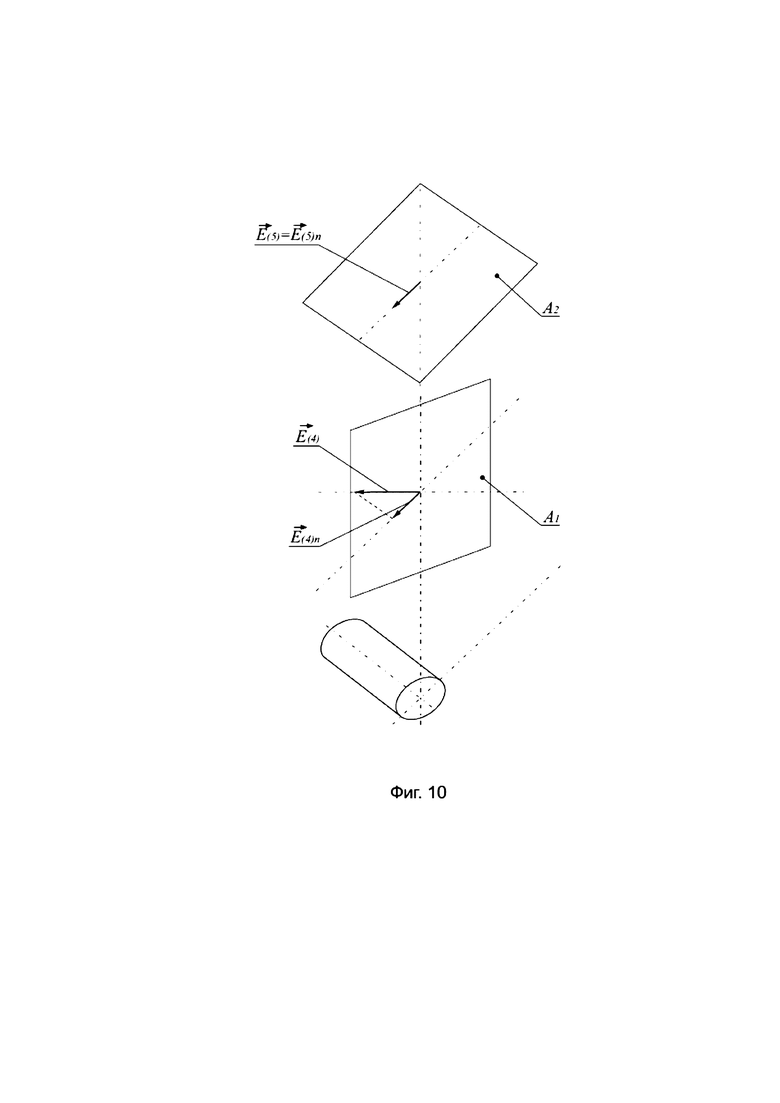
Фиг. 10 - Определение вектора электромагнитной индукции в системе из двух блоков датчиков;
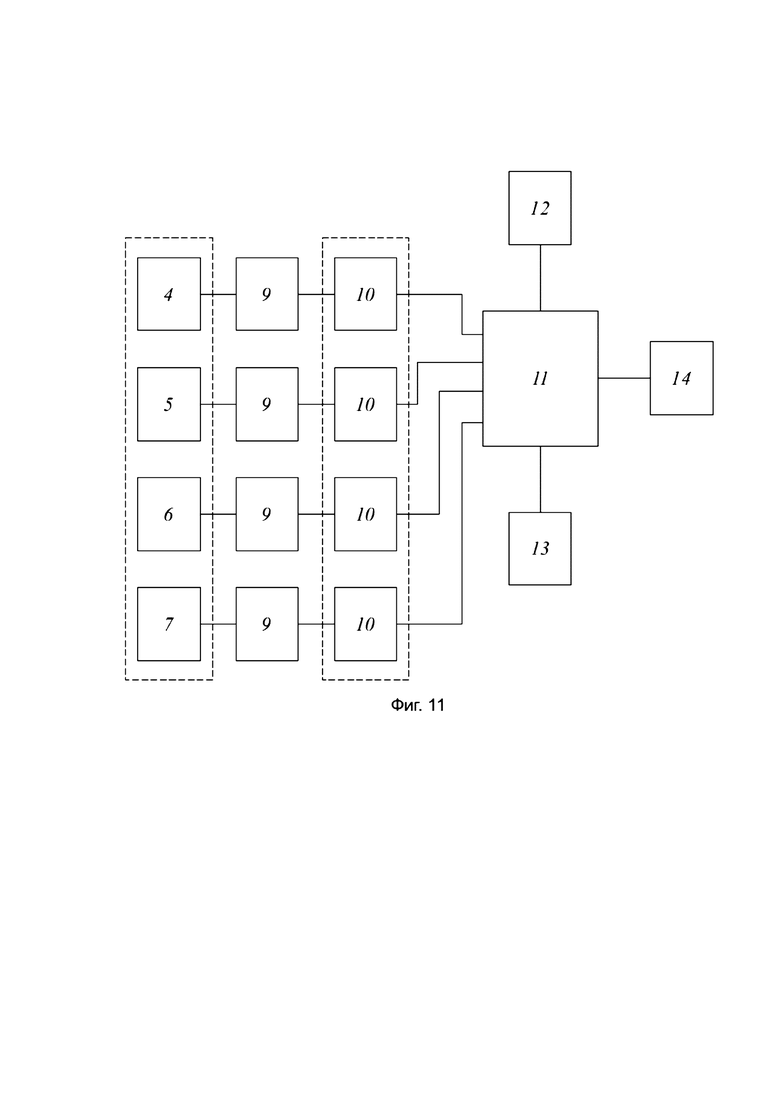
Фиг. 11 - Блок-схема устройства.
На фигурах цифрами обозначены следующие элементы:
1 - коммуникация;
2 - генератор электрического тока;
3 - устройство поиска коммуникаций;
4 - первый блок датчиков электромагнитного поля;
5 - второй блок датчиков электромагнитного поля;
6 - третий блок датчиков электромагнитного поля;
7 - четвертый блок датчиков электромагнитного поля;
8 - антенна;
9 - блок предусилителей;
10 - АЦП;
11 - микропроцессор;
12 - блок памяти;
13 - индикатор;
14 - блок управления;
А1, А2, A3, А4 - плоскости блоков датчиков;
B1, В2, - вектор электромагнитной индукции, измеряемый антенной;
Bc - суммарный вектор электромагнитной индукции, измеряемый блоками антенн;
а1, а2, а3 - фиксированное расстояние между блоками датчиков;
h - глубина залегания коммуникации;
 - расстояние до коммуникации;
- расстояние до коммуникации;
α - угол прохождения коммуникации.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Устройство для определения места прохождения и глубины залегания коммуникации содержит, по меньшей мере, два блока датчиков электромагнитного поля, один из которых выполнен в виде, по меньшей мере, двух антенн, а второй, по меньшей мере, в виде одной антенны. При этом антенны блоков датчиков электромагнитного поля соединены с блоками предусилителей, которые соединены с АЦП, соединенным с микропроцессором, с которым в свою очередь соединены блок памяти, индикатор и блок управления.
Ось одинарной антенны второго блока датчиков может быть перпендикулярна линии, соединяющей первый и второй блоки датчиков, и находится в плоскости, проходящей через обе оси антенн первого блока датчиков, выполненного в виде, по меньшей мере, двух антенн, и которая проходит через ось прибора. Каждая антенна соединена с блоком обработки сигнала, на котором производится обработка измеренных на антеннах сигналов.
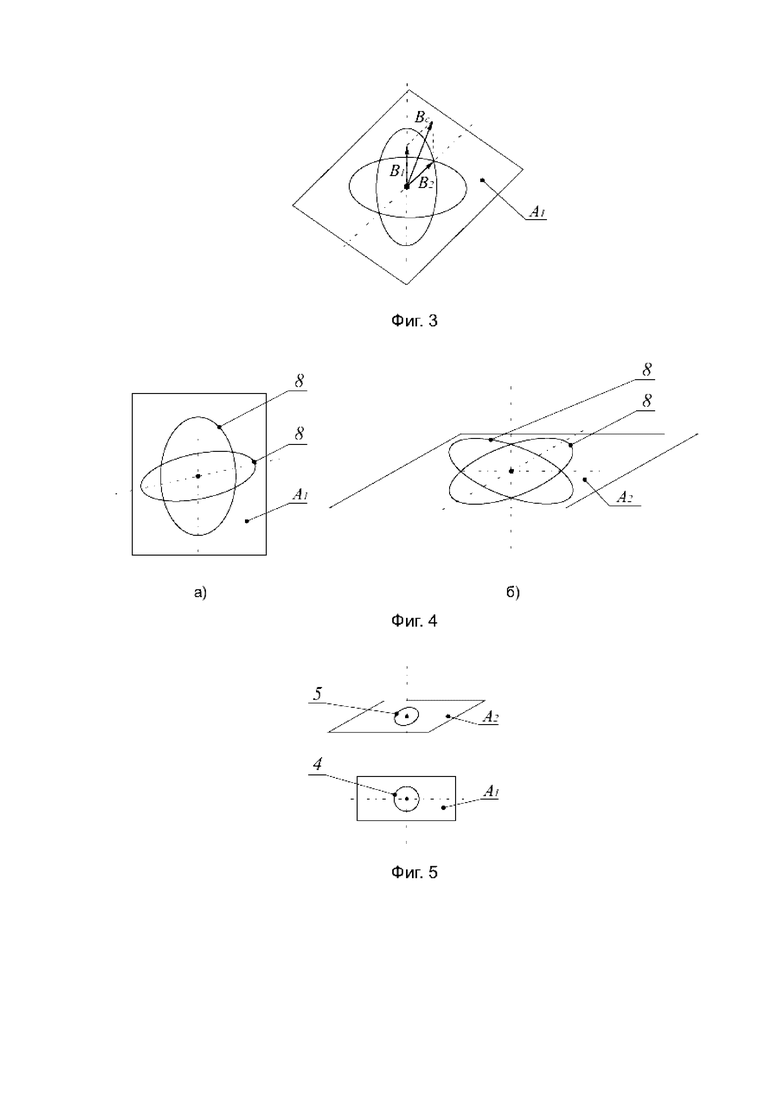
В первом блоке датчиков, выполненном в виде, по меньшей мере, двух антенн (фиг. 2) электромагнитного поля, антенны (8) могут быть выполнены взаимно перпендикулярными. Размещение антенн в блоке датчиков ортогонально друг другу позволяет упростить расчеты и определение направления и амплитуды суммарного вектора. Направление и величина суммарного вектора электромагнитной индукции получается путем векторного сложения измеренных величин электромагнитной индукции на каждой из антенн.
Суммарный вектор (Bc) электромагнитной индукции лежит в плоскости (А1), образованной осями двух антенн (Фиг. 3), называемой в дальнейшем плоскостью блока датчиков. Каждая антенна измеряет величину вектора электромагнитной индукции, который направлен вдоль оси антенны B1 и B2. Так как антенны взаимно ортогональны, то и вектора ортогональны. Два вектора задают плоскость. В этой плоскости лежит и суммарный вектор. В зависимости от пространственной ориентации антенн можно получить дополнительные данные о направлении и величине вектора магнитной индукции.
Плоскость блока датчиков может проходить через ось прибора (Фиг 4a), может быть перпендикулярна ей (фиг. 4б), или находиться под углом к оси прибора.
Устройство может содержать два блока датчиков (4, 5) электромагнитного поля (фиг. 5), каждый из которых выполнен в виде двух антенн, при этом плоскость (А1), проходящая через обе оси антенн первого блока датчиков (4) может быть перпендикулярна или параллельна плоскости (А2), проходящей через обе оси антенн второго блока датчиков (5) и плоскость первого блока датчиков проходит через ось прибора.
При использовании двух блоков датчиков электромагнитного поля, первый блок (4) датчиков может содержать три взаимоортогональные антенны, а ось одинарной антенны второго блока (5) датчиков, находящегося на фиксированном расстоянии от первого блока датчиков, ортогональна линии соединяющей первый и второй блоки датчиков.
При использовании двух блоков датчиков электромагнитного поля, один блок датчиков (4) может содержать три взаимно ортогональные антенны, а второй (5) - две взаимно ортогональные антенны (Фиг. 6), при этом плоскость (А2), проходящая через обе оси антенн второго блока (5) датчиков может быть параллельна оси (фиг. 6а) или находиться под углом к оси (фиг. 6б), соединяющей центры блоков датчиков.
При использовании двух блоков (4, 5) датчиков электромагнитного поля, блоки датчиков (4, 5) электромагнитного поля расположены на фиксированном расстоянии (а1) по вертикали друг от друга (фиг. 1).
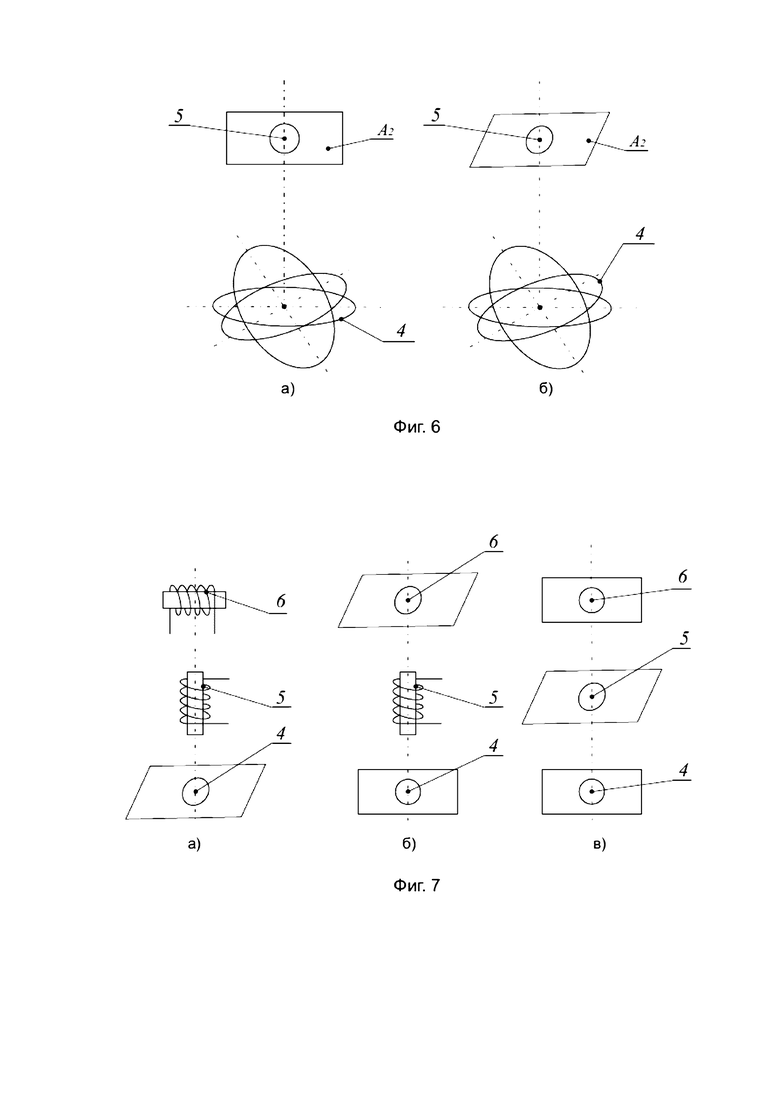
Устройство может содержать три блока датчиков (4, 5, 6) электромагнитного поля (фиг. 7). При использовании трех блоков датчиков электромагнитного поля, первый блок датчиков электромагнитного поля может содержать две антенны, и плоскость, проходящая через обе оси антенн первого блока датчиков ортогональна оси прибора, а второй и третий блоки датчиков могут содержать по одной антенне (фиг. 7а), расположенных на разных фиксированных расстояниях от первого блока, и ось антенны второго блока датчиков может проходить через ось прибора, а ось антенны третьего блока датчиков может быть ортогональна оси прибора.
При использовании трех блоков датчиков электромагнитного поля, первый и третий блоки датчиков электромагнитного поля могут содержать по две антенны, а второй блок датчиков может содержать одну антенну (фиг. 7б), расположенную на фиксированном расстоянии от первого блока, и ось которой может проходить вдоль оси прибора, при этом плоскость, проходящая через обе оси антенн первого блока датчиков может быть ортогональна плоскости, проходящей через обе оси антенн третьего блока датчиков и параллельна оси прибора.
При использовании трех блоков (4, 5, 6) датчиков электромагнитного поля, каждый из блоков может быть выполнен в виде, двух антенн (фиг. 7в), при этом плоскость (А2), - одного из блоков (5) датчиков может быть перпендикулярна плоскостям (А1, A3), двух оставшихся блоков датчиков (4, 6) и перпендикулярна или параллельна оси прибора.
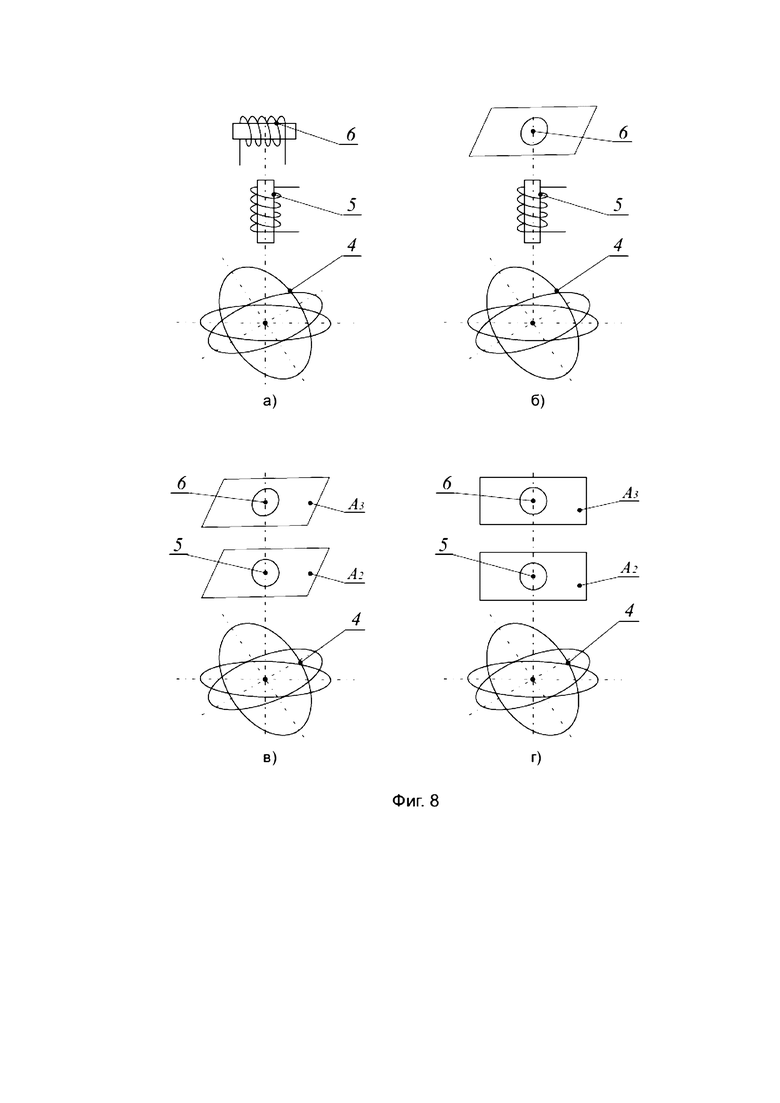
При выполнении устройства с тремя блоками датчиков (4, 5, 6), первый блок датчиков (4) может содержать три взаимноперпендикулярные антенны, а второй (5) и третий (6) блоки по одной антенне (фиг. 8а), при этом ось одиночной антенны третьего блока датчиков (6), находящегося на фиксированном расстоянии от первого блока датчиков, перпендикулярна линии, соединяющей первый и третий блоки датчиков, при этом второй блок датчиков (5) расположен на линии, соединяющей первый и второй блоки датчиков, может иметь одиночную антенну, ось которой параллельна линии, соединяющей первый и второй блоки датчиков.
При выполнении устройства с тремя блоками датчиков (4, 5, 6), первый блок датчиков (4) может содержать три взаимноперпендикулярные антенны, второй (5) блок одну антенну, а третий (6) - две антенны (фиг. 8б), плоскость третьего (6) блока датчиков ортогональна оси, соединяющую первый и третий блоки датчиков, при этом второй блок датчиков (5) расположен на линии, соединяющей первый и второй блоки датчиков, может иметь одиночную антенну, ось которой параллельна линии, соединяющей первый и второй блоки датчиков.
При использовании трех блоков датчиков электромагнитного поля (4, 5, 6), первый блок датчиков (4) может содержать три взаимно ортогональные антенны, а второй и третий по две взаимно ортогональные антенны (фиг. 8в, г), при этом плоскость A3, проходящая через обе оси антенн третьего блока датчиков может быть перпендикулярна (фиг. 8в) или параллельна (фиг. 8г) плоскости, проходящей через обе оси антенн второго блока датчиков. Плоскость второго блока датчиков проходит через ось, соединяющую первый и второй блоки датчиков.
При использовании трех блоков (4, 5, 6) датчиков электромагнитного поля, блоки датчиков (4, 5, 6) электромагнитного поля расположены на фиксированном расстоянии (а1, а2) по вертикали друг от друга (фиг. 1).
Устройство может содержать четыре блока датчиков. При использовании четырех блоков датчиков электромагнитного поля, каждый из них может быть выполнен в виде, двух антенн, при этом плоскость, проходящая через обе оси антенн одного из блоков датчиков, перпендикулярна плоскостям, проходящим через обе оси антенн трех оставшихся блоков датчиков.
При использовании четырех блоков датчиков электромагнитного поля, каждый из них может быть выполнен в виде, двух антенн (фиг. 9б), при этом плоскости (А2, А4), проходящие через обе оси антенн двух из блоков датчиков (5, 7), могут быть параллельны между собой и перпендикулярны плоскостям (А1, A3), проходящим через обе оси антенн двух других оставшихся блоков (4, 6) датчиков.
При использовании в устройстве четырех блоков датчиков электромагнитного поля, первый (4) и третий блоки датчиков могут содержать две антенны, второй (5) и четвертый (6) блоки датчиков по одной антенне (фиг. 9а), которые расположены на разных фиксированных расстояниях от первого блока (4), и оси которых проходят через ось прибора, а плоскости первого и третьего датчиков взаимноортоганальны.
При использовании в устройстве четырех блоков датчиков электромагнитного поля, первый блок может содержать две антенны, второй и третий четвертый блоки датчиков могут содержать по одной антенне, расположенных на разных фиксированных расстояниях от первого блока, и оси которых могут быть параллельны оси прибора, а третий блок датчиков может содержать две антенны, и плоскость, проходящая через обе оси антенн третьего блока датчиков может быть перпендикулярна оси прибора.
При использовании в устройстве четырех блоков датчиков электромагнитного поля, первый блок (4) может содержать две антенны, второй (5) и третий (6) блоки датчиков по одной антенне, расположенных на разных фиксированных расстояниях от первого блока (4), и оси которых взаимно перпендикулярны и перпендикулярны оси прибора, а четвертый блок (7) датчиков может содержать одну антенну, ось которой параллельна оси прибора.
При использовании четырех блоков (4, 5, 6, 7) датчиков электромагнитного поля, блоки датчиков (4, 5, 6, 7) электромагнитного поля расположены на фиксированном расстоянии (а1, а2, а3) по вертикали друг от друга (фиг. 1).
Антенны каждого блока датчиков могут иметь прямоугольную форму или форму окружности, при этом оси антенн могут быть расположены взаимно ортогонально и выполнены в виде катушек индуктивности. Одиночные антенны могут быть выполнены на ферритовом сердечнике в виде катушек индуктивности.
В устройстве каждая антенна в блоке датчиков (4-7) соединена с предусилителем (9), которые, в свою очередь, соединены с АЦП (10), которые соединены с микропроцессором (11), к которому подключен блок памяти (12), блок индикации (13) и блок управления (14) (фиг 11).
За счет использования, по меньшей мере, двух блоков датчиков, первый из которых содержит, по меньшей мере, две антенны, а второй - по меньшей мере, одну антенну, в отличие от прототипа, в котором в блоках датчиков содержится по три антенны, а также за счет определения амплитуды и направления вектора электромагнитной индукции одновременно в горизонтальной и вертикальной плоскостях обеспечивается повышение точности и достоверности определения места прохождения и глубины залегания коммуникаций, за счет снижения габаритов и веса антенн обеспечивается улучшение эксплуатационных характеристик прибора, уменьшение вычислительных мощностей, позволяет на 50% удешевить стоимость антенного блока и входных каскадов электроники.
Способ определения места прохождения и глубины залегания коммуникаций с использованием заявленного устройства осуществляют следующим образом.
Сначала осуществляют возбуждение электромагнитного излучения в коммуникации (1) при помощи генератора (2) электрического тока (фиг. 1), который подключают при помощи первого провода к одному концу коммуникации, а второй провод генератора (2) электрического тока заземляют, при этом второй конец коммуникации также заземляют. С помощью генератора (2) электрического тока создают переменный ток в коммуникации (1), который, в свою очередь, создает изменяющееся электромагнитное поле над коммуникацией (1).
Данный ток также может быть наведен проходящим в коммуникации током от сторонних источников, например, током в электрическом кабеле от сети.
Затем осуществляют установку рядом с предполагаемым местом прохождения коммуникации устройства (3), содержащего, по меньшей мере, два блока датчиков. (Фиг 1).
После чего осуществляют измерение ориентации вектора (Вс) электромагнитной индукции, создаваемого коммуникацией, и уровня напряженности (амплитуды) электромагнитного поля в каждом блоке датчиков при помощи заявленного устройства, расположенного над предполагаемым местом прохождения коммуникации (1). Измерение ориентации вектора электромагнитной индукции и уровня напряженности электромагнитного поля осуществляют за счет того, что сигнал электромагнитного поля от коммуникации принимается, по меньшей мере, двумя антеннами первого блока (4) датчиков и, по меньшей мере, одной антенной второго блока (5) датчиков, отнесенной на фиксированное расстояние (Фиг. 1). С антенн каждого блока датчиков сигнал поступает на блок предусилителей (9), где усиливается, и поступает на вход аналого-цифрового преобразователя АЦП (10) и оцифровывается в нем, с которого цифровой сигнал поступает в микропроцессор (11). В микропроцессоре (11) рассчитывается амплитуда сигнала, направление вектора электромагнитной индукции. Результаты расчетов выводятся на индикатор (13) и заносятся в блок памяти (12).
Использование двух блоков датчиков, первый из которых содержит, по меньшей мере, две антенны, а второй - по меньшей мере, одну антенну, в отличие от прототипа, в котором в блоках датчиков содержится по три антенны, позволяет на 50% удешевить стоимость антенного блока и входных каскадов электроники, улучшить эксплуатационные характеристики прибора за счет снижения веса антенн, при этом решить задачи поиска прохождения коммуникации и определения глубины ее залегания.
Далее с помощью оператора, например, вращением прибора вокруг своей оси, определяют максимальный уровень сигнала и направление на трассу.
Затем с помощью оператора осуществляют перемещение блока датчиков электромагнитного поля над коммуникацией, перпендикулярно оси предполагаемой трассы прохождения коммуникации в новую точку измерения и осуществляют измерение ориентации вектора электромагнитной индукции и максимального уровня напряженности электромагнитного поля в новой точке измерения, как описано выше. При этом повторение этапов перемещения блока датчиков электромагнитного поля над коммуникацией перпендикулярно оси предполагаемой трассы прохождения и измерения ориентации вектора электромагнитной индукции и уровня напряженности электромагнитного поля необходимое количество раз (не менее трех раз) до тех пор, пока заявленное устройство не окажется над местом прохождения коммуникации, где точность определения места прохождения и глубины залегания выше. При невозможности нахождения блока датчиков над местом прохождения коммуникации, измерения проводят в точке, наиболее приближенной к месту прохождения коммуникации.
При использовании в устройстве (3) первого блока (4) датчиков электромагнитного поля, содержащего две антенны и второго (5) и третьего (6) блоков датчиков, каждый из которых содержит по одной антенне, расположенных на разных фиксированных расстояниях от первого блока (4), и оси которых взаимно перпендикулярны и ось второго датчика проходит через ось прибора (Фиг. 7а), способ определения места прохождения коммуникации осуществляется аналогично, как описано выше.
При использовании в устройстве (3) четырех блоков датчиков электромагнитного поля, каждый из которых содержит две антенны, при этом плоскости первого (4) и третьего (6) блоков датчиков ортогональны оси прибора, а плоскости второго (5) и четвертого (7) параллельны (Фиг. 9б), способ определения места прохождения коммуникации осуществляется аналогично, как описано выше. Искажение электромагнитного поля, вызванное несферичностью, определяется с помощью четвертого блока (7) датчиков. Это позволяет еще более точно определить место положения коммуникации и внести поправки при расчете глубины залегания.
При использовании в устройстве (3) первого блока (4) датчиков электромагнитного поля, содержащего три антенны, второго (5) и третьего (6) блоков датчиков, каждый из которых содержит по одной антенне, расположенных на разных фиксированных расстояниях от первого блока (4), ось одной из которых перпендикулярна оси прибора, а ось второй параллельна оси прибора (Фиг. 8а), способ определения места прохождения коммуникации осуществляется аналогично, как описано выше. Искажение электромагнитного поля, вызванное несферичностью, определяется с помощью третьего блока (6) датчиков. Это позволяет более точно определить место положения коммуникации и внести поправки при расчете глубины залегания. При этом уменьшаются габариты прибора.
При использовании в устройстве двух блоков (4, 5) датчиков электромагнитного поля, расположенных на фиксированном расстоянии по вертикали друг от друга, каждый из которых содержит по две антенны (Фиг. 5), способ определения места прохождения коммуникации осуществляется аналогично, как описано выше. Устройство перемещается поперек предполагаемой трассы прохождения трубопровода и одновременно измерения осуществляются двумя блоками по две антенны в каждом. Оси антенн в каждом блоке проходят через центр антенн и пересекаются в одной точке. Плоскости, образованные осями антенн первого и второго блоков взаимно перпендикулярны. В случае, когда плоскость первого блока параллельна поверхности грунта, плоскость второго блока перпендикулярна плоскости поверхности грунта (Фиг. 5).
В отличие от прототипа, в блоках датчиков которого содержится по три антенны, заявленное устройство с двумя блоками датчиков, содержащих по две антенны, позволяет дополнительно на треть удешевить стоимость антенного блока и входных каскадов электроники, улучшить эксплуатационные характеристики прибора за счет снижения веса антенн, при этом решить задачи поиска коммуникации и определения глубины ее залегания.
Размещение антенн в блоке датчиков ортогонально друг другу позволяет упростить расчеты и определение направления и амплитуды суммарного вектора. Направление и величина суммарного вектора электромагнитной индукции получается путем векторного сложения измеренных величин электромагнитной индукции на каждой из антенн.
Суммарный вектор электромагнитной индукции лежит в плоскости, образованной осями двух антенн (Фиг. 3), называемой в дальнейшем плоскостью блока датчиков. Каждая антенна измеряет величину вектора электромагнитной индукции, который направлен вдоль оси антенны. Так как антенны взаимно ортогональны, то и вектора ортогональны. Два вектора задают плоскость. В этой плоскости лежит и суммарный вектор (Вс). В зависимости от пространственной ориентации антенн можно получить дополнительные данные о направлении и величине вектора магнитной индукции.
Измеренные данные о направлении вектора магнитной индукции на первом (4) блоке (фиг. 10), при ориентации прибора по максимуму сигнала, позволяют определить направление на коммуникацию, угол прохождения коммуникации (α) и зону наиболее точных измерений, а на втором (5) и первом блоках - глубину залегания. Измеренные амплитуды и углы наклонов векторов позволяют определить глубину залегания (h) и расстояние до коммуникации  .
.
Выполняются измерения величины напряженности электромагнитного поля на каждом из блоков датчиков.


где Е(4) и Е(5) величина напряженности электромагнитного поля измеренная на первом и втором блоке датчиков соответственно;
h5=h+а1, а1 - заданное фиксированное расстояние между датчиками.
Условную глубину определяют из решения системы уравнений

при фиксированном значении  и определенном угле наклона вектора электромагнитной индукции (α).
и определенном угле наклона вектора электромагнитной индукции (α).
Для случая  решение может быть выполнено аналитически по формуле
решение может быть выполнено аналитически по формуле
где Е(4)n и Е(5)n проекции векторов в плоскости, перпендикулярной коммуникации (Фиг. 10).
Предварительно проводят калибровку прибора на стендовом оборудовании и вносят тестовые значения зависимости условной глубины от угла α, под которым коммуникация находится по отношению к одному из блоков и оси приемника.
Наивысшая точность достигается при пространственном расположении прибора таким образом, что плоскость (А1) перпендикулярна оси коммуникации. Ориентация прибора осуществляется на основе индикации направления вектора Е(5) в плоскости (А2), либо по максимуму уровня сигнала при повороте устройства вокруг своей оси.
На основе расчетных данных и данных по предварительной калибровке рассчитывают величину глубину залегания и расстояние до коммуникации, в случае, когда устройство находится не над коммуникацией.
Таким образом устройство позволяет определить: место прохождения коммуникации; глубину ее залегания, как находясь над трассой, так и на некотором расстоянии от нее; угол, под которым ось коммуникации находится по отношению к прибору.
При использовании в устройстве трех блоков датчиков электромагнитного поля (Фиг. 7), расположенных на фиксированном расстоянии по вертикали друг от друга, способ определения места прохождения коммуникации осуществляется аналогично, как описано выше. Устройство перемещается поперек предполагаемой трассы прохождения трубопровода и одновременно измерения осуществляются тремя блоками по две антенны в каждом.
Выполняются измерения величины напряженности электромагнитного поля на каждом из блоков датчиков.



где Е(4), Е(5) и Е(6) величина напряженности электромагнитного поля измеренная на первом, втором и третьем блоке датчиков соответственно;
h5=h+а1, h6=h+a1+a2, a1, a2 - заданное фиксированное расстояние между датчиками.
Условную глубину определяют из решения системы уравнений



При фиксированном значении и определенном угле наклона вектора электромагнитной индукции.
Для случая  решение может быть выполнено аналитически. Например, для блоков 4 и 6 выражение имеет вид
решение может быть выполнено аналитически. Например, для блоков 4 и 6 выражение имеет вид
где Е(4)n и Е(6)n проекции векторов в плоскости, перпендикулярной коммуникации.
Расстояние до коммуникации определяется по измеренному углу наклона и расчетной величине глубины залегания.
Размещение плоскости двух блоков параллельно поверхности грунта позволяет провести измерение глубины залегания коммуникации при произвольной ориентации прибора. Размещение плоскости двух блоков перпендикулярно поверхности грунта позволяет провести измерение места прохождения коммуникации с более высокой точностью.
Применение дополнительного третьего блока датчиков позволяет идентифицировать отклонение формы магнитного поля от сферической, и выявить наличие помех. Кроме этого, измерить отклонения от сферичности поля и ввести в расчеты поправки на несферичность. На основе предварительно выявленных зависимостей места положения прибора от измеренных поправок на несферичность, внести поправки в расчеты места положения и глубины залегания коммуникаций.
При использовании в устройстве четырех блоков датчиков электромагнитного поля (Фиг. 9б), расположенных на фиксированном расстоянии по вертикали друг от друга, способ определения места прохождения коммуникации осуществляется аналогично, как описано выше. Устройство перемещается поперек предполагаемой трассы прохождения трубопровода и одновременно измерения осуществляются четырьмя блоками по две антенны в каждом.
Выполняются измерения величины напряженности электромагнитного поля на каждом из блоков датчиков.




где Е(4), Е(5), Е(6) и Е(7) величина напряженности электромагнитного поля измеренная на первом, втором, третьем и четвертом блоке датчиков соответственно;
h5=h+а1, h6=h+a1+a2, h7=h+a1+a2+а3, a1, a2, а3 - заданные фиксированные расстояния между датчиками.
Условную глубину определяют из решения системы уравнений




При фиксированном значении  и определенном угле наклона вектора электромагнитной индукции.
и определенном угле наклона вектора электромагнитной индукции.
Для случая  решение может быть выполнено аналитически для любой пары блоков. Например, для блоков 4 и 6 выражение имеет вид
решение может быть выполнено аналитически для любой пары блоков. Например, для блоков 4 и 6 выражение имеет вид
где Е(4)n и Е(6)n проекции векторов в плоскости, перпендикулярной коммуникации.
Расстояние до коммуникации определяется по измеренному углу наклона и расчетной величине глубины залегания.
Размещение плоскости двух блоков параллельно поверхности грунта позволяет провести измерение глубины залегания коммуникации при произвольной ориентации прибора и позволяет провести измерение места прохождения коммуникации с более высокой точностью (Фиг. 9б). Размещение плоскости трех блоков параллельно поверхности позволяет более точно определить глубину залегания в сложных условиях.
Применение дополнительно третьего и четвертого блоков датчиков позволяет идентифицировать отклонение формы магнитного поля от сферической, и выявить наличие помех с большей точностью, чем для трех блоков. Кроме этого, измерить отклонения от сферичности поля и ввести в расчеты поправки на несферичность. На основе предварительно выявленных зависимостей места положения прибора от измеренных поправок на несферичность, внести поправки в расчеты места положения и глубины залегания коммуникаций.
При использовании в устройстве двух блоков (4, 5) датчиков электромагнитного поля, один из которых содержит три антенны (Фиг. 6), а второй - две, способ определения места прохождения коммуникации осуществляется аналогично, как описано выше. Устройство перемещается поперек предполагаемой трассы прохождения трубопровода и одновременно измерения осуществляются двумя блоками.
Оси антенн в каждом блоке проходят через центр антенн и пересекаются в одной точке. Плоскость второго блока, в зависимости от поставленной задачи либо параллельна поверхности грунта, либо перпендикулярна плоскости поверхности грунта (Фиг. 6а, 6б).
Измеренные данные о направлении вектора магнитной индукции на первом блоке (4) позволяют определить направление и угол на коммуникацию и зону наиболее точных измерений, а на втором блоке (5) - угол прохождения коммуникации (α), при вертикальном расположении, и направление, при горизонтальном. Кроме этого, измеренные амплитуды и углы наклонов векторов позволяют определить глубину залегания и расстояние до коммуникации.
Выполняются измерения величины напряженности электромагнитного поля на каждом из блоков датчиков.


где h5=h+а1, а1 - заданное фиксированное расстояние между датчиками.
Условную глубину определяют из решения системы уравнений


при фиксированном значении и определенном угле наклона вектора электромагнитной индукции (α).
Для случая решение может быть выполнено аналитически по формуле
где Е(4)n и Е(5)n проекции векторов в плоскости, перпендикулярной коммуникации.
Предварительно проводят калибровку прибора на стендовом оборудовании и вносят тестовые значения зависимости условной глубины от угла α, под которым коммуникация находится по отношению к одному из блоков и оси приемника.
Наивысшая точность достигается при пространственном расположении прибора таким образом, что плоскость А2 перпендикулярна оси коммуникации. Ориентация прибора осуществляется на основе индикации направления вектора Е(4).
На основе расчетных данных и данных по предварительной калибровке рассчитывают величину глубину залегания и расстояние до коммуникации, в случае, когда устройство находится не над коммуникацией.
Применение третьей антенны в первом блоке 4 позволяет более точно определить место прохождения коммуникации.
При введении в прибор дополнительно третьего блока датчиков, содержащего одиночную антенну, ось которой расположена перпендикулярно поверхности грунта, повышается точность обнаружения места прохождения коммуникации в сложных условиях помех.
Введение в прибор дополнительно третьего и четвертого блоков датчиков, содержащих каждый по одиночной антенне, оси которых расположены перпендикулярно поверхности грунта, позволяют еще более повысить точность обнаружения места прохождения коммуникации в сложных условиях помех.
Таким образом, за счет проведения расчета глубины залегания по полученным данным и расчета глубины залегания и расстояния до коммуникации, находясь на удалении от коммуникации, обеспечивается повышение точности и достоверности определения места прохождения и глубины залегания коммуникаций.
Изобретение было раскрыто выше со ссылкой на конкретные варианты его осуществления. Для специалистов могут быть очевидны и иные варианты осуществления изобретения, не меняющие его сущности, как она раскрыта в настоящем описании. Соответственно, изобретение следует считать ограниченным по объему только нижеследующей формулой изобретения.

Группа изобретений относится к определению места прохождения и глубины залегания коммуникаций. Сущность: способ определения места прохождения и глубины залегания коммуникации включает этапы возбуждения электромагнитного излучения в коммуникации, установку над предполагаемым местом прохождения коммуникации, по меньшей мере, двух блоков датчиков электромагнитного поля, один из которых выполнен в виде, по меньшей мере, двух антенн, а второй в виде, по меньшей мере, одной антенны, измерения ориентации вектора электромагнитной индукции и уровня напряженности электромагнитного поля, вращения, по меньшей мере, двух блоков датчиков вокруг вертикальной оси и определение максимального уровня напряженности электромагнитного поля и направления на коммуникацию, перемещения, по меньшей мере, двух блоков датчиков электромагнитного поля над коммуникацией в зоне ее предполагаемого прохождения в новую точку измерения, измерения максимального уровня напряженности электромагнитного поля и ориентации вектора электромагнитной индукции в новой точке измерения, повторения этапов перемещения, по меньшей мере, двух блоков датчиков электромагнитного поля над коммуникацией в зоне ее предполагаемого прохождения и измерения максимального уровня напряженности электромагнитного поля и ориентации вектора электромагнитной индукции не менее трех раз, определения расстояния до коммуникации и глубины ее залегания по величине уровня напряженности электромагнитного поля и направлению вектора электромагнитной индукции. Технический результат: повышение точности и достоверности определения места прохождения и глубины залегания коммуникаций, уменьшение вычислительных мощностей, сокращение габаритов. 2 н. и 13 з.п. ф-лы, 11 ил.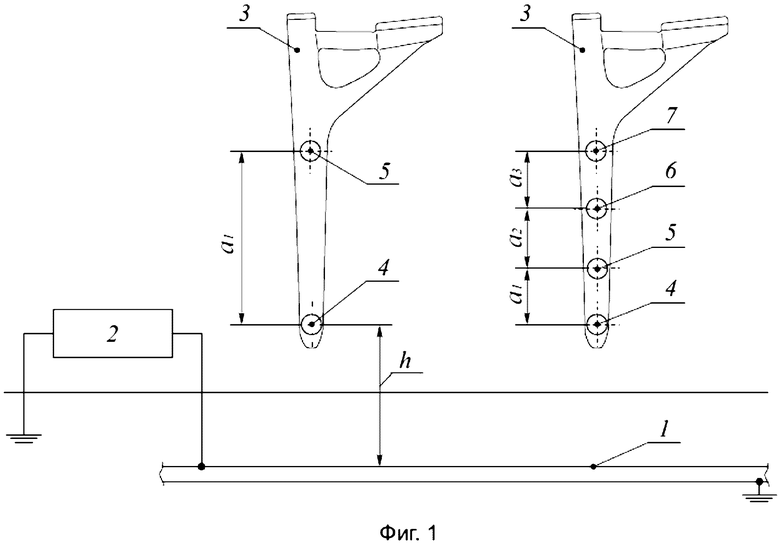
1. Способ определения места прохождения и глубины залегания коммуникации, включающий следующие этапы:
а) возбуждение электромагнитного излучения в коммуникации;
б) установка над предполагаемым местом прохождения коммуникации, по меньшей мере, двух блоков датчиков электромагнитного поля, один из которых выполнен в виде, по меньшей мере, двух антенн, а второй в виде, по меньшей мере, одной антенны;
в) измерение ориентации вектора электромагнитной индукции и уровня напряженности электромагнитного поля;
г) вращение, по меньшей мере, двух блоков датчиков вокруг вертикальной оси и определение максимального уровня напряженности электромагнитного поля и направления на коммуникацию;
д) перемещение, по меньшей мере, двух блоков датчиков электромагнитного поля над коммуникацией в зоне ее предполагаемого прохождения в новую точку измерения;
е) измерение максимального уровня напряженности электромагнитного поля и ориентации вектора электромагнитной индукции в новой точке измерения;
ж) повторение этапов перемещения, по меньшей мере, двух блоков датчиков электромагнитного поля над коммуникацией в зоне ее предполагаемого прохождения и измерения максимального уровня напряженности электромагнитного поля и ориентации вектора электромагнитной индукции не менее трех раз;
з) определение расстояния до коммуникации и глубины ее залегания по величине уровня напряженности электромагнитного поля и направлению вектора электромагнитной индукции.
2. Способ по п. 1, отличающийся тем, что ось антенны второго блока датчиков перпендикулярна линии, соединяющей первый и второй блоки датчиков, и находится в плоскости, проходящей через обе оси антенн первого блока датчиков, выполненного в виде, по меньшей мере, двух антенн, и которая проходит через ось прибора.
3. Способ по п. 1, отличающийся тем, что над предполагаемым местом прохождения коммуникации устанавливают три блока датчиков, при этом третий блок датчиков, выполнен в виде как минимум одиночной антенны, находящейся на фиксированном расстоянии от первого и второго блоков датчиков, на линии, соединяющей первый и второй блоки датчиков.
4. Устройство для определения места прохождения и глубины залегания коммуникации для осуществления способа по п.1, содержащее, по меньшей мере, два блока датчиков электромагнитного поля, один из которых выполнен в виде, по меньшей мере, двух антенн, а второй, по меньшей мере, в виде одной антенны, причем антенны блоков датчиков электромагнитного поля соединены с блоками предусилителей, которые соединены с аналого-цифровыми преобразователями, соединенными с микропроцессором, с которым в свою очередь соединены блок памяти и индикатор.
5. Устройство по п. 4, отличающееся тем, что ось антенны второго блока датчиков перпендикулярна линии, соединяющей первый и второй блоки датчиков, и находится в плоскости, проходящей через обе оси антенн первого блока датчиков, выполненного в виде, по меньшей мере, двух антенн, и которая проходит через ось прибора.
6. Устройство по п. 4, отличающееся тем, что содержит два блока датчиков электромагнитного поля, каждый из которых выполнен в виде двух антенн, при этом плоскость, проходящая через обе оси антенн первого блока датчиков перпендикулярна плоскости, проходящей через обе оси антенн второго блока датчиков.
7. Устройство по п. 4, отличающееся тем, что содержит два блока датчиков электромагнитного поля, при этом первый блок датчиков содержит три взаимно ортогональные антенны, а второй - две взаимно ортогональные антенны, и плоскость, проходящая через обе оси антенн второго блока датчиков, параллельна оси или находится под углом к оси, соединяющей центры блоков датчиков.
8. Устройство по п. 4, отличающееся тем, что содержит три блока датчиков, при этом первый блок датчиков электромагнитного поля содержит две антенны, и плоскость, проходящая через обе оси антенн первого блока датчиков ортогональна оси прибора, а второй и третий блок датчиков содержат по одной антенне, расположенных на разных фиксированных расстояниях от первого блока, и ось антенны второго блока датчиков проходит через ось прибора, а ось антенны третьего блока датчиков ортогональна оси прибора.
9. Устройство по п. 4, отличающееся тем, что содержит три блока датчиков, при этом первый и третий блоки датчиков электромагнитного поля содержат две антенны, а второй блок датчиков содержит одну антенну, расположенную на фиксированном расстоянии от первого блока, и ось которой проходит вдоль оси прибора, при этом плоскость, проходящая через обе оси антенн первого блока датчиков ортогональна плоскости, проходящей через обе оси антенн третьего блока датчиков и параллельна оси прибора.
10. Устройство по п. 4, отличающееся тем, что содержит три блока датчиков, при этом первый блок датчиков электромагнитного поля содержит три антенны, а второй и третий блок датчиков содержат по одной антенне, расположенных на разных фиксированных расстояниях от первого блока, и ось антенны второго блока датчиков проходит через ось прибора, а ось антенны третьего блока датчиков ортогональна оси прибора.
11. Устройство по п. 4, отличающееся тем, что содержит три блока датчиков, при этом первый блок датчиков электромагнитного поля содержит три антенны, второй блок датчиков содержит одинарную антенну, ось которой проходит вдоль оси прибора, а третий блок датчиков содержит две антенны, а плоскость, проходящая через обе оси антенн третьего блока датчиков, ортогональна оси прибора.
12. Устройство по п. 4, отличающееся тем, что содержит три блока датчиков электромагнитного поля, каждый из которых выполнен в виде двух антенн, при этом плоскость, проходящая через обе оси антенн одного из блоков датчиков, перпендикулярна плоскостям, проходящим через обе оси антенн двух оставшихся блоков датчиков.
13. Устройство по п. 4, отличающееся тем, что содержит три блока датчиков электромагнитного поля, при этом первый блок датчиков содержит три взаимно ортогональные антенны, а второй и третий по две взаимно ортогональные антенны.
14. Устройство по п. 4, отличающееся тем, что содержит четыре блока датчиков электромагнитного поля, каждый из которых выполнен в виде двух антенн.
15. Устройство по п. 4, отличающееся тем, что содержит четыре блока датчиков электромагнитного поля, первый блок из которых содержит две антенны, второй и четвертый блоки датчиков содержат по одной антенне, расположенных на разных фиксированных расстояниях от первого блока, и оси которых параллельны оси прибора, а третий блок датчиков содержит две антенны, и плоскость, проходящая через обе оси антенн третьего блока датчиков, перпендикулярна оси прибора.
| US 5194812, 16.03.1993 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ЗАЛЕГАНИЯ И РАССТОЯНИЯ ДО МЕСТА ПРОХОЖДЕНИЯ КОММУНИКАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2635402C2 |
| US 2012139525 A1, 07.06.2012 | |||
| US 2009128156 A1, 21.05.2009 | |||
| EP 3339914 A1, 27.06.2018 | |||
| US 7332901 B1, 19.02.2008. | |||

